Entwicklung einer steuerung mit grafische oberfläche auf einem mini-computer zur durchführung von fahrzyklen an einem motorprüfstand.par Patrick Siandji Djumedio Hochschule für Technik und Wirtschaft Berlin - Bachelorarbeit 2019 |

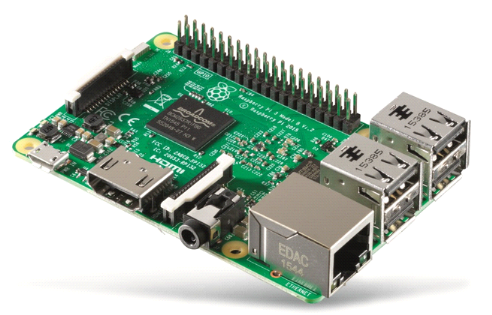
2. Technische GrundlageDie Kenntnis des Bussystems ist eine elementare Grundlage für eine fehlerfreie Datenübertragung mit dem Raspberry Pi. In diesem Kapitel wird zunächst die Grundlage des Raspberry Pi, d. h. die Struktur des Raspberry Pi Modells B, diskutiert, dann eine Einführung in Bussysteme und deren Zugriffsmethoden. 2.1 Der Raspberry Pi5 9 8 4 3 6 2 7 1
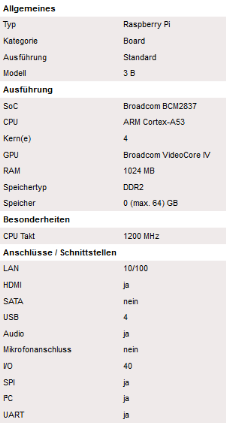
Abbildung 1: Raspberry Pi 3 Model B(Pollin Electronic GmbH, 2019) 1: 40 GPIO-Pins 2: Broadcom BCM2837 64bits, Quad Core CPU, 1.2GHz, 1GB RAM 3:5 Volt Mikro-USB für die Energieversorgung 4:RJ-45 Buchse (LAN) 5: 4 USB 2.0 Anschlüsse 6: DSI Display Anschluss 7: HDMI Anschluss 8: Audio / Video Ausgang 9: CSI Kamera Anschluss Der Raspberry Pi ist ein Einplatinencomputer, der von der Raspberry Pi Fundation angefertigt wurde. Durch seine steuerbaren I/Os kann erleichtvon Sensoren und Gerätenabgelesen und gesteuert werden. Aus diesem Grund wird erin vielen Bereichen als wirtschaftliche Alternative zu alltäglichen Computern eingesetzt. Es gibt heute verschiedene Versionen von Raspberry Pi. Dieseunterscheidensich vom alten Modell dadurch, dass sieüber einen integrierten WLAN-Chip verfügen. Dadurch entfällt für die meisten Anwendungen ein zusätzlicher WLAN-USB-Stick. Zudem verfügen sie über eine Bluetooth-Verbindung. Der Mikroprozessor ARM Cortex-A53 unterstützt einen 64-Bit-Befehlssatz und 4x 1200 MHz-Takte. Diese Eigenschaften machen den Raspberry Pi 3B zu einem vollwertigen PC, weshalb er in diesem Projekt eingesetzt wird. (Gitter, 2018) Die folgende Tabelle zeigt eineausführliche Eigenschaft der Raspberry Pi 3 B : Tabelle 1: Raspberry Pi 3 Modell B Technische Daten (Reichelt Elektronik, 2019)
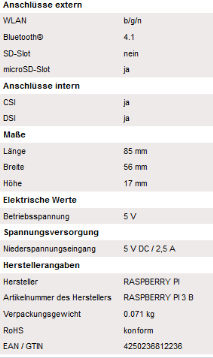
2.2 Bussystem2.2.1AllgemeinDamit Computer mit externen Geräten kommunizieren bzw. Daten austauschen können,braucht es eine Verknüpfung zwischen diesen. Ein Bussystem dient dazu,Informationen zwischen Systemkomponenten auszutauschen(Kofler, Kühnast, & Scherbeck, 2018, S. 423). Es existieren verschiedene Arten von Bussystem, die sich vor allem hinsichtlichihrer Datenübertragungsraten,Sicherheit, Kapazität, Latenz, Kosten, Echtzeitfähigkeit, Buszugriffsverfahrenunterscheiden. Ein Paar davon kann man zum Beispiel nennen: Ethernet, UART, CAN, LIN, MOST ... Für die Steuerung des Motorprüfstands und denDatenaustausch zwischen dem Raspberry Pi und dem Motor wird der Fokusin dieser Bachelorarbeit auf die Benutzung von zwei Bussystemen gelegt, und zwar auf den CANBusund das Universal AsynchronousReceiver Transceiver, abgekürzt UART. 2.2.2 CAN-BusAbbildung 2: CAN Bus Kommunikation im Kfz Bosch-Technologien (Robert Bosch GmbH, 2019).
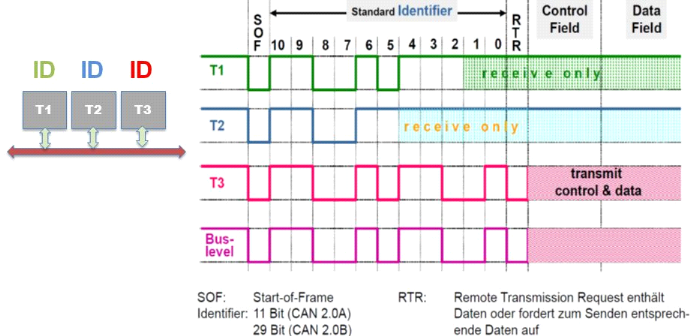
Die Zunahme der elektronischen Systeme in der Automobilindustrie in den 1990er Jahren und die erheblichen Kabelbäume zur Datenübertragung führten 1983 zur Entwicklung des CAN-Busses.CAN steht für Controller Area Network und wurde von der Robert Bosch GmbH als Bussystem für Kraftfahrzeuge entwickelt. Dieses serielle Bussystem enthält für die Datenübertragung ausschließlich ein zwei-Draht-Bussystem (CAN High und CAN Low) und kann trotz des einfachen Aufbaus sehr große Netzwerke mit bis zu 100 Steuergeräten bilden (Engels, 2000, S. 51). Der CAN Bus arbeitet nach dem Multiple Master System. In diesem Zugriffsverfahren kann der CAN Bus gleichberechtigt mit vielen Steuergeräten verbunden werden.Das bedeutet, bei einem freien Buskönnen allean den Busangeschlossenen Geräte eine Nachricht schicken.Das Steuergerät mit der Nachricht höherer Rangbekommt die Priorität bei dem Bus-Zugriff. Die Priorität der Nachricht wird auf den IDENTIFIER angezeigt. Das bedeutet, je kleiner die Binärzahl eines Identifiers ist, umso größer ist seine Priorität (Siehe Abb.3). Ein Dominante Bit wird mit 0 gekennzeichnet und ein Rezessive Bit mit 1. (Engels, 2000, S. 60-61) In der folgenden Abbildung ist zu erkennen, dass der Teilnehmer 2(T2) seinen Arbitrierungsvorgang beendet(Bit 5 des Identifikators),wenn er feststellt, dass die logische Ebene auf dem Bus dominant ist. Auf die gleiche Weise beendet der Teilnehmer 1 (T1) seinen Arbitrierungsprozess auf Bit 2 seines Identifikators. Der Teilnehmer 3 gewinnt dann den Bus-Zugriff und kann seine Daten auf das Bus senden.
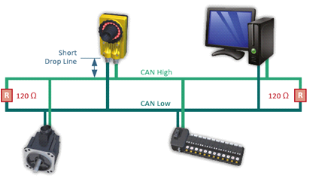
Abbildung 3: Bitweise Arbitrierung in der CAN Bus Kommunikation (slideplayer.org, 2017). Der Identifier unterscheidet sich je nach Rahmenformat:Ein Standard-Rahmen wird mit 11 Bit-Identifier gekennzeichnet und ein Erweiterter-Rahmen(EXTENDED Frames)mit 29 Bit-Identifier.Für eine reibungslose Nachrichtenübertragung soll der Bus nach der ISO 11898an beiden Enden mit jeweils 120 Ohm abgeschlossen werden (Engels, 2000, S. 52-61).Diese Terminierung sorgt dafür, dass es in einem CAN-High-Speed-Netzwerk aufgrund der Signalausbreitungzu keinerSpiegelungkommt.
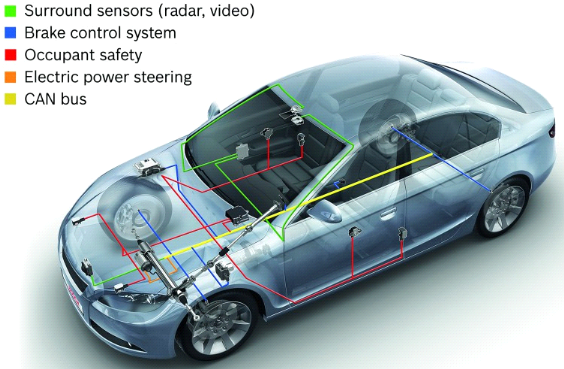
Abbildung 4: Beispiel eines CAN-BUS-Netzwerks (HMS Industrial Networks AB, 2019). Der Datentransportmit einem CAN-Bus kann mit einer Bitrate von bis zum1 Mbit/s erfolgen.Die maximale Kabellänge für den Datenübertragung ist dann von der Bitrate bestimmt. (ME-Meßsysteme GmbH, 2008) Die folgende Tabelle zeigt die Abhängigkeit bzw. die empfohlenen Bitraten und die entsprechendenKabellängen.
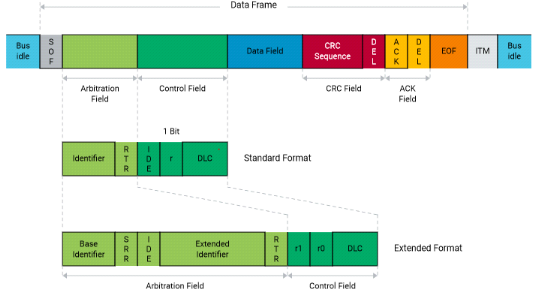
Tabelle 2:Empfohlene Bitraten und die entsprechenden maximalen Kabellängen(ME-Meßsysteme GmbH, 2008) Der Datenaustausch auf dem CAN-Bus erfolgt mit Hilfe von Telegrammen, wobeivier verschiedene Sorten von Telegrammen existieren: 1. Daten-Rahmen für das Senden von Daten an Empfänger 2. Anforderungs-Rahmen (Remote Frame) 3. Fehler-Rahmen (Error Frame) 4. Überlast-Rahmen (Overload Frame) Der Telegrammaufbau einer Nachrichtfür die Datenübertragung von Sender zu Empfänger (DATA FRAME)besteht aus sieben unterschiedlichen Bit-Feldern: · Rahmen Start (SOF) · Message Identifier (Arbitration Field) · Kontrollfeld · Steuerbits (Daten Field) · CRC-Feld · Quittungs-Feld (ACK Field) · RahmenEnde (EOF) (Engels, 2000, S. 64-66) Die Folgende Abbildung zeigt die Data Frame im Standard- und Extended-Format.
Abbildung 5: Data Frame im Standard- und Extended-Format(VECTOR INFORMATIK GMBH, 2019) Der hier für den Datenaustausch verwendete CAN-Bus-Controller ist das Modul MCP2515. Da dieses Modul über eine SPI-Schnittstelle gesteuert wird, ist zunächst eine grundlegende Einführung bezüglichdieser erforderlich. |
|