Entwicklung einer steuerung mit grafische oberfläche auf einem mini-computer zur durchführung von fahrzyklen an einem motorprüfstand.par Patrick Siandji Djumedio Hochschule für Technik und Wirtschaft Berlin - Bachelorarbeit 2019 |

6.1.2.2 CAN-Bus (MCP2515) KonfigurationFür die Konfiguration der MCP2515 auf dem Raspberry Pi muss bekannt sein, welche Kernel-Version auf der Raspberry Pi installiert ist. Dies lässt sich mit dem Befehl uname -aherausfinden pi@raspberrypi:~$ uname -a Die Konfiguration der MCP2515 CAN Bus erfolgt dann beim Ergänzen einiger Overlay-Leitungen in der /boot/config.txt Datei.
Die obenstehende Eingabe ist abder4.4.x + Kernel Version gültig. Bei früheren Kernel-Versionen,d. h. für Versionen älter als Version 4.4.x, muss die folgende Zeile eingefügt werden:
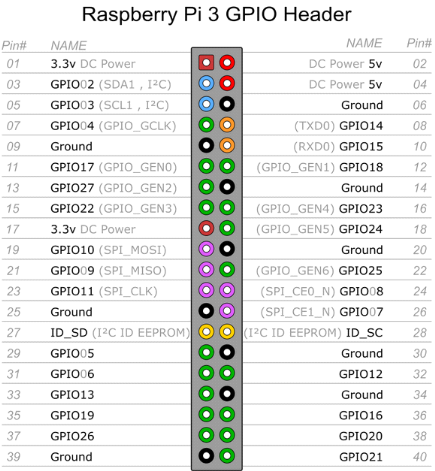
Der für diese Bachelorarbeit vorliegende MCP2515 Controller hat eine Taktfrequenz von 8MHz,weshalb auf dem Parameter oscillator der Wert 8000000 steht. Der Zahl 25 bedeutet, dass das Interrupt Pin der CAN Controller auf der GPIO.25 (BCM-Nummerierungsschema) der Raspberry Pi angeschlossen wird. Der GPIO.25 entspricht der Pin 22.
Tabelle 5: GPIO-Belegung der Raspberry Pi Model 3B(element14, 2019) Nach dem Neustart der Raspberry Pi durch den sudo rebootBefehlkann nun überprüft werden, ob der MCP2515 CAN Bus gut konfiguriert wurde. Dafür muss das folgende Kommando eingegeben werden. Der SPI-Schnittstelle wurde erkannt. spi0.0 spi0.1 pi@raspberrypi:~ $ ls /sys/bus/spi/devices/spi0.0 driver modalias net of_node subsystem uevent pi@raspberrypi:~ $ ls /sys/bus/spi/devices/spi0.0/net can0 Der CAN-Schnittstelle wurde erkannt. Damit die Can0-Schnittstelle beim Systemstart automatisch mit einer Bitrate von 500 kbit/s aufgerufen wird, muss die etc/network/interfaces Datei bearbeitet werden. Dies erfolgt wie folgt: pi@raspberrypi:~$ sudo nano /etc/network/interfaces In der Datei werden die folgenden Zeilen eingefügt und diese wird mit STRG + Xund danach mit Y gespeichert: GNU 2.7.4 # interfaces (5) file used by ifup(8) and ifdown(8) Auto can0 Iface can0 can static bitrate 500000 Die Verbindungsstatus wird mit dem ifconfig Kommando auf dem Terminal angezeigt. pi@raspberrypi:~$ ifconfig Der Befehl ip kann detaillierte Informationen über den Netzwerkstatus geben, wenn der folgende Befehl verwendet wird: pi@raspberrypi:~$sudo ip -d -s link show can0 -d und -sbeziehensich jeweils auf Detail und Statistik 6.1.2.3 Installation von CAN-UtilsMit diesem Tool kann einfach und schnell überprüft werden, ob CAN-Nachrichten gesendet bzw. empfangen werden können. Die folgende Zeile zeigt, wie es installiert wird: pi@raspberrypi:~$sudo apt-get install can-utils Der Test für den Datenaustausch über den CAN-Bus wird mit einem PCAN-USB-Adapter durchgeführt. 6.1.2.4PCAN-USB-Adapter KonfigurationUSB Anschluss 9-polige D-Sub-Steckverbindung
Abbildung 32: CAN-Interface für USB (PEAK-System Technik GmbH, 2019) Der PCAN-USB-Adapter wurde von derPEAK-System Technik GmbH entwickelt und dient zu der einfachen Anbindung an ein CAN-Netzwerk. Dieser Adapter wird über eine 9-polige D-Sub-Steckverbindung für die Kommunikation über CAN-Bus angeschlossen. Die maximale Übertragungsrate wird bei 1Mbit/s erreicht und bestimmt somit die maximale Kabellänge für eine reibungslose Kommunikation. Die folgende Tabelle zeigt die mögliche maximale CAN-Kabellänge in Abhängigkeitzu der Übertragungsrate.
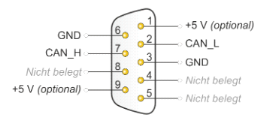
Tabelle 6: mögliche maximale Kabellänge in Abhängigkeit zu der Übertragungsrate für das PCAN USB-Adapter(PEAK-System Technik GmbH, 2019) Der High-Speed-Can-Bus (ISO 11898-2) hat keine interne Terminierung und muss an beiden Enden mit einem 120-Ohm-Widerstand terminiert sein (PEAK-System Technik GmbH, 2019). Der PCAN-USB-Adapterkann einen Standard-Frame sowie einen Extended-Frame mit bis zu 1Mbit/s übertragen. Der Anschlussbelegung des PCAN-Bus-Adaptersgestaltet sichfolgendermaßen:
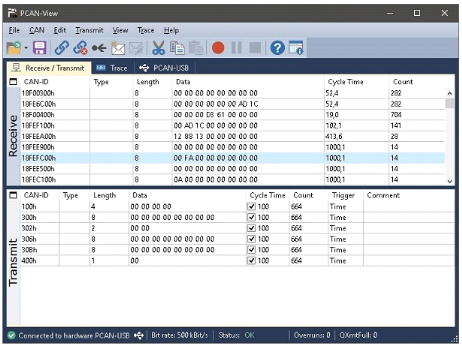
Pin 2 Pin 7 Abbildung 33: Anschlussbelegung der PCAN-Bus-Adapter (PEAK-System Technik GmbH, 2019). Durch die PCAN-view-Software kann der Datentransfer über den CAN-Bus betrachtet und aufgezeichnet werden. Dessen Installation erfolgt über denfolgenden Link https://www.peak-system.com/PCAN-USB.199.0.html
Abbildung 34: Ansicht von CAN-Transfer über die PCAN-view-Software(Warszawa, 2019) |
|