X-Achse scrollbar Widget
Textfeld X-Achse Scrollbar Widget
Abbildung 26: Anzeigefenster auf
der grafischen Oberfläche
6.Kommunikation mit der
Hardware
6.1 CAN-Bus-Kommunikation
6.1.1 Der MCP-2515
Das CAN-BUS-Modul,das in dieser Bachelorarbeitfür die
Kommunikation mit dem Motorprüfstand verwendet wird, ist der MCP-2515. Ein
detaillierter Überblick über das Modulistim Punkt
2.2.2.2)zu entnehmen. Dieses besteht aus einem MCP2515 CAN
Controller und einem TJA1050 CAN Transceiver. DiesenbeidenChips enthalten auf
die Platine eine gemeinsame Spannungsversorgung(Raspberry Pi Foundation, 2019).
Gemeinsame Spannungsversorgung
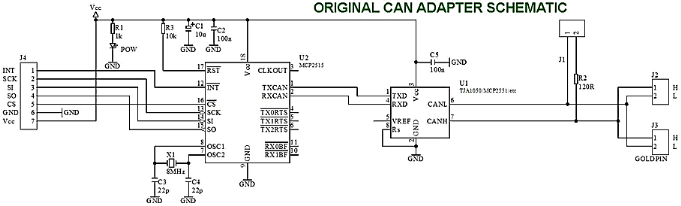
Abbildung 27: Schaltplan einem
MCP2515 CAN Modul(Raspberry Pi Foundation, 2019)
Da der MCP2515 Controller mit einem Eingangsspannung von 3,3 V
versorgt werden soll und der TJA1050 CAN Transceiver mit einer
Versorgungsspannung von 5V, ist es erforderlich,den Schaltplan des CAN-Moduls
zu modifizieren,sodass die beiden Chips eine getrennte Spannungsversorgung
haben. Die Versorgungspannung beider Chips mit 5V würde funktionieren,
jedoch wäre dann ein Pegelwandeln für den SPI erforderlich. Die
GPIO-Pins von Raspberry Pi sind NICHT 5V tolerant(vimtut0r,
2019).5V tolerant bedeutet,dass ein 5V-Baustein einen 3V-Baustein ansteuern
kann, was hier jedoch nicht der Fall ist.
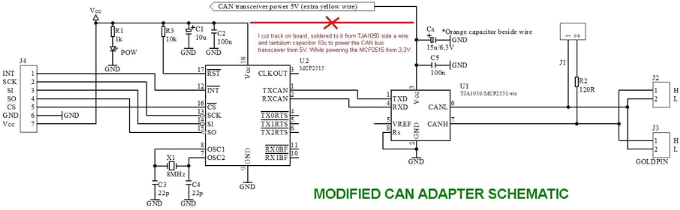
Abbildung 28:
ModifizierterSchaltplan der CAN BUS Modul (Raspberry Pi Foundation,
2019).
Der Raspberry Pi kann nun mit dem MCP 2515 CAN-Modul
angeschlossen werden. Die Schaltung gestaltet sich wie folgt:
5V Versorgungsspannung für der TJA1050 CAN Transceiver
MCP2515
CAN Controller
Raspberry Pi Modell 3B
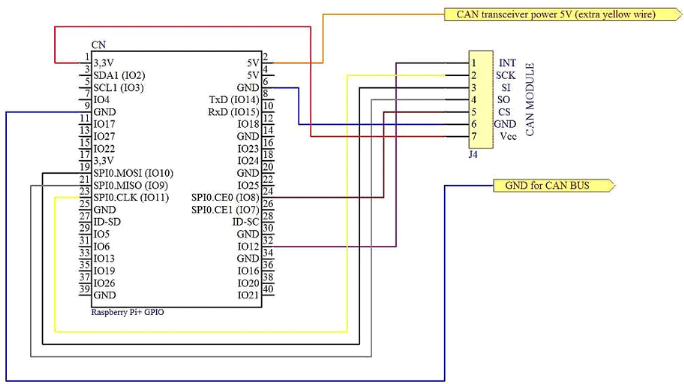
Abbildung 29: Schaltung von
MCP2515 mit dem Raspi(Raspberry Pi Foundation, 2019)
Der gesamte Schaltplan mit Pin-Belegungeiner CAN-Bus
Kommunikation mit dem MCP-2515stellt sich folgendermaßen dar:
Pin Nummer(Kein GPIO Nummer)
TJA1050
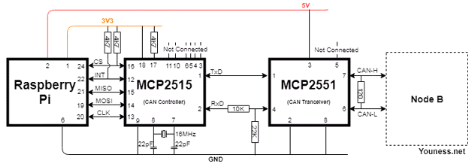
Abbildung 30: Gesamter
Schaltplanmit der Pin-Belegung einer CAN-BUS Kommunikation (Hackster.io, an
Avnet Community, 2019)
Anmerkung:CS, MISO, MOSI, CLK zeigt die
Belegung der Pins der SPI-Schnittstelle.Zudem wäre die Aktivierung von
diesen auf dem Raspberry Pi für die Kommunikation mit dem CAN Bus
notwendig.
6.1.2Vorbereitung
6.1.2.1 SPI Konfiguration
Es gibt zwei Möglichkeiten,die SPI-Schnittstelle auf dem
Raspberry Pi zu aktivieren. Die erste Möglichkeit wäre es, den
folgendenBefehl über das Terminal einzugeben. Hierzu muss zunächst
das Linux-System aktiviert und geöffnet werden,danachdas Fenster für
die Konfiguration des Interfaces wie folgendes:
Achtung: Der Text, der hinter dem Hash-Zeichen (#)
steht,istausschließlich als Kommentar zu betrachten.
pi@raspberrypi:~ $ sudo apt-get update #Aktualisierung von
Linux-System
pi@raspberrypi:~ $ sudo apt-get upgrade#sucht nach neue
Version der Linux-sys
pi@raspberrypi:~ $ Sudo raspi-config #öffnen das
KonfigurationFenster
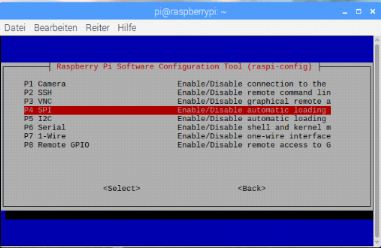
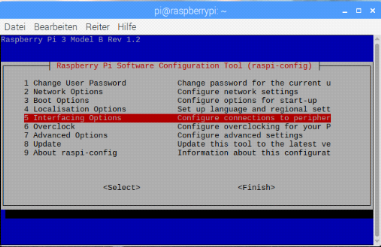
Dann ist das ProgrammEinstellungen zu
starten. Es ist dasInterfacing Options' Menü unter den
erweiterten Möglichkeiten zu wählen(siehe 1 unter Abb.31). Danach
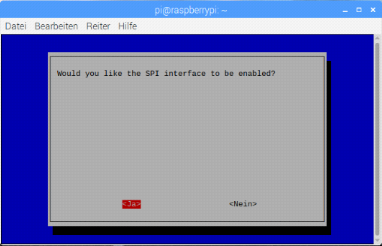
wird das unter Menü Serial Peripheral Interface(SPI) selektiert, sodass
nun dieSPI-Schnittstelleaktiviert bzw. deaktiviert werden kann.
Schließich wird die Einstellung mit einem <ok>
bestätigt.(FrAn, 2019)
1
2
4
3
1
Abbildung 31: Die verschiedenen
Schritte für die Aktivierung der SPI auf dem Raspberry Pi
Die andere Möglichkeit,um das SPI zu aktivieren, erfolgt
mit der manuellen Einrichtung. Es wird dafür die
/boot/config.txt Datei bearbeitet. Diese Datei ist mit einem
Editor zu öffnet, indem der folgende Befehl in das Linux-Kommando
eingegeben wird:
pi@raspberrypi:~$ sudo nano /boot/config.txt
Danach wird die folgende Zeile eingegeben:
dtparam=spi=on // dieser Befehl aktiviert das Serial
Peripheral Interface (SPI)
| 

