3.5. L'approche locale
Les techniques locales n'utilisent pas de modèle
complet de l'espace libre. Elles sont sans mémoire, et ne prennent en
compte à une instante donne que l'environnement proche du mobile pour
modifier une trajectoire de consigne.
Ces méthodes sont attrayantes par leur
simplicité, bien sûr elles présentent un
inconvénient majeur de ne pas pouvoir suivre le chemin optimal. Le
système peut être bloqué par des dispositions concaves
d'obstacle. Ces méthodes sont beaucoup moins couteuses et ne utilises
Chapitre 03
Planification de localisation et trajectoire
pour acquérir des informations nécessaires au
fur et à mesure de déplacement les méthodes locales
existantes sont [14]:
· Méthode de champs de potentiel.
· La méthode myopique.
3.5.1. Méthode myopique
Cette méthode est inspirée du comportement d'un
aveugle évoluant dans un environnement inconnu en détectant les
parois des obstacles avec sa canne. L'algorithme de contournement d'obstacle
permet au robot mobile d'évoluer en fonction des informations issues des
capteurs. II part de l'hypothèse que s'il existe un chemin entre un
point initial Po et un point finale Pn l'algorithme est
capable de le déterminer en longeant les obstacles présents sur
la trajectoire du robot. Si le lieu d'évolution ne comporte pas
d'obstacle entre les points de départ et d'arrivée, la
trajectoire est la droite passant par les points Po (Xo,
Yo) et Pn (Xn,Yn) . La figure 3.6
représente cette méthode [12].
En présence d'obstacles, on définit des points
intermédiaires en fonction des obstacles, à contourner.
L'ensemble des segments joignant ces points constitue la trajectoire de
contournement.
X
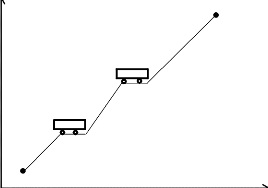
Pn(Xn,Yn)
P2 (X2,Y2)
P1(X1,Y1)
Po (Xo,Yo)
Y
35
Figure 3.6 : Contournement dans le cas de la
méthode myopique.
Chapitre 03
Planification de localisation et trajectoire
36
3.5.2. Méthode de champs de potentiel
La méthode considère que le mobile évolue
dans un champ de forces dont le but est un pôle attractif alors que les
obstacles sont répulsifs. L'amplitude de la force de répulsion
est une fonction de l'inverse de la distance entre le mobile et l'obstacle
alors que la force d'attraction est une fonction de la distance à
parcourir jusqu' au but [14].
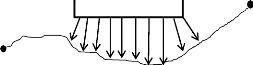
Obstacle
Départ
Figure 3.7: Principe d'évolution d'un
robot mobile par la méthode de champs de potentiel
5. Evitement des obstacles en logique floue
| 

