I.5.1. Le modèle cinématique du robot de type
uni-cycle:

(a) (b)

Figure .I.6: Robot mobile: (a)
MIABOT, (b) Pioneer P3-DX.
Le modèle d'un robot mobile uni-cycle correspond à
celui d'une roue roula
La configuration de l'uni-cycle e caractérisée par
la donnée es nombres
Où x et y dénotent les
coordonné cartésiennes du point de ntact de la roue avec le
sol
dans un repère cartésien donné, orientation
de la roue et 'angle de la roue mesurée à
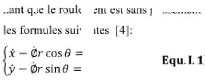
partir de la verticale. Sach u ement est sans glissement le
modèle cinématique
de la roue s'exprime par van
0 ( )
0
Où r représente le rayon de la roue.
Le modèle (1.1) peut être transformé pour
faire apparaître les composantes des vitesses
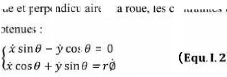
dans les plans de la roue peenule à l l contraintes
cinématiques
suivantes sont alors obs
s =
Ces deux équations sont des contraintes de type non
holonome, signifiant que l'on ne peut pas les intégrer de façon
à ne faire apparaître que les coordonnées
généralisées. Cela peut
8
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
se démontrer simplement à l'aide
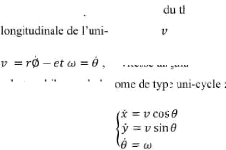
héorème de Frobenius. En notant la vitesse
it cycle avec
sa vitesse angulaire, on déduit de (1.1) le modèle
cinématique du
robot mobile non-holono e
( )
I.5.2. Le modèle cinématique de type voiture :
Un robot mobile de type voiture est composé d'un train moteur à
l'arrière du corps principal et de deux roues de direction et
à


bu érentiel à l'avant (Figure.
I.7)

iguration du véhicule de type v peut être
représentée pa quadruplet
[ Ø] , où le point de cordonnées le centre
de l'essieu arr de la
voiture, st l'orientation du véhicule, Ø
l'orientation des roues avant et distance
entre les essieux avant et
arrière.
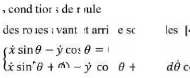
ins oment sans glissement s'obtient éivant que les
vitesses
Les
latérales u a e ère ont null
4]:
s 0
( )
( +y Ø)
s( + Ø) - os Ø = 0
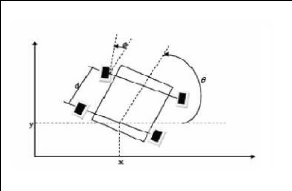
Figure. I.7: Robot mobile de type
voiture.
Ces contraintes sont non intégrables, le véhicule
de type voiture est donc non holonome.
9
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
En utilisant des tranons r l'équation(1.4) , le
modèle cinématique d'un
robot mobile non-holono v enu :

( )
Où orrespond à la vitesse longitudinale du corps du
robot, alors que
rrespond à la vitesse angulaire des roues directrices par
rapport au corps du véhicule.
I.6. LES DIFFERENTS TYPES DE TERRAIN:
Nous rencontrons principalement 3 types d'espaces de navigation :
les terrains plats, les Terrains accidentés et les espaces 3D. Les
terrains plats sont généralement utilisés pour
modéliser les milieux urbains et les intérieurs de
bâtiments. Le robot évolue sur un plan 2D considéré
sans pentes, et tout objet qui sort de cet espace 2D est
considéré comme un obstacle (Figure. I.8).
Cette représentation est la plus simple à
étudier et la plus répandue pour les robots mobiles aux roues. En
première approche, elle permet de se concentrer sur les problèmes
de contrôle et de navigation autonome du robot.

Figure. I.8 : Robucab [10].
Les terrains accidentés (ou 2D 1 /2) correspondent
généralement aux milieux en extérieurs, comme des
forêts, des champs en robotique agricole, ou encore des terrains rocheux
(Figure. I.9). La différence avec les
terrains plats est la présence des pentes, de bosses et de creux sur le
terrain d'évolution du robot.
10
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Cela interdit d'utiliser une métrique standard 2D et cela
complique pour beaucoup la détection d'obstacles et la
modélisation des déplacements du robot. De plus il devient
également important de vérifier que le robot ne bascule pas quand
il escalade une pente ou enjambe un obstacle. Le système de locomotion
du robot doit dans ce cas être adapté à la topologie du
terrain.
Figure. I.9 : Le robot martien Sojouner
[5].
Enfin les espaces d'évolution 3D sont par exemple
utilisés pour modéliser la navigation des robots sous-marins
(Figure. I.10) et des drones volants (Figure.
I.11). Les problèmes rencontrés sont spécifiques
à l'application visée.
Chaque type de terrain correspond à des
problématiques bien spécifiques. Le type de robot
étudié dans ce mémoire est celui destiné à
circuler en environnement urbain, la modélisation terrain plat sera
utilisée. Cela signifie que l'on considère que tous les
mouvements sont contenus dans un plan de navigation, parallèle au
sol.

Figure. I.10 : Le robot sous marin TAIPAN
[12].
11
Robot Mobile Avec Suivi Visuel De Ligne

Chapitre I : Généralités Sur Les Robots
Mobiles
Figure. I.11 : Drone de surveillance
RESSAC de l'ONERA [8].
I.7. LOCALISATION:
Les outils permettant la localisation d'un robot dans son
environnement peuvent être classés en deux catégories :
ceux par localisation à l'estime et ceux par localisation absolue [5].
Le principe de la première catégorie consiste à
intégrer des informations sur les vitesses ou les
accélérations fournies par des capteurs proprioceptifs
(odomètres, centrales inertielles).
L'avantage de ces méthodes est qu'elles sont
indépendantes de l'environnement, par contre leur souci est leur manque
de précision dû à la dérive temporelle. En effet les
Erreurs s'intégrant elles aussi au fur et à mesure du temps. Il
est nécessaire d'apporter régulièrement des recalages
(Figure. I.12).
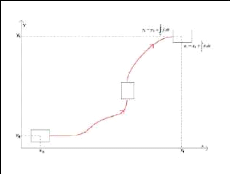
Figure. I.12 : Localisation à
l'estime.
12
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Parmi les méthodes de localisation à l'estime, le
système le plus simple et le plus couramment utilisé pour la
mesure de déplacement du robot est l'odométrie.
L'hypothèse de roulement sans glissement que nous avons vu
précédemment, nous permet de relier directement les
déplacements du robot à la vitesse de rotation des roues. Par
intégration des déplacements à chaque instant, on en
déduit la position relative du robot par rapport à son point de
départ. L'odométrie est une méthode de localisation
très courante, simple, mais également très rapidement
imprécise.
En effet à cause du glissement des roues sur le sol, les
erreurs s'accumulent au fur et à mesure que le robot avance, ce qui
implique d'importantes erreurs sur les longs parcours s'il n'y a pas de
recalage régulier.
Cette méthode est de ce fait fortement tributaire de la
qualité du sol sur lequel le robot se déplace. Les incertitudes
sur le diamètre exact des roues, sur les paramètres
géométriques du robot, sur la résolution des codeurs,
génèrent des erreurs de type systématique, qui vont
s'accumuler très rapidement en odométrie.
Cependant, ces erreurs peuvent être identifiées et
évaluées pour faire un rééquilibrage du
système et ainsi améliorer sa précision. Les erreurs non
systématiques comme les glissements ou les irrégularités
du sol, génèrent moins rapidement des erreurs, mais ne peuvent
par contre pas être rééquilibrées puisqu'on ne peut
pas les prévoir.
Pour l'exploration martienne, où le terrain est fortement
accidenté, l'utilisation de
Système d'odométrie classique est impossible. Pour
cette application, Cheng a proposé une technique d'odométrie
alternative, dite odométrie visuelle, basée sur la reconnaissance
de points singuliers dans l'image vidéo du sol fournie par une
caméra montée sur le robot [5] (les points de Harris).
Connaissant le positionnement de la caméra par rapport au
robot, le déplacement de ces points dans l'image permet d'évaluer
les vitesses de déplacement du robot, et par intégration, de
retrouver sa localisation relative par rapport à sa position
initiale.
Le second type de méthode pour la localisation est la
localisation absolue. Ces méthodes utilisent des éléments
repérables par le robot dans l'environnement de navigation, de
position
Connue, pour permettre au robot de se repérer relativement
à ceux-ci. Ces éléments sont appelés des balises ou
amers et sont dits soit réels, s'ils ont été placés
spécialement pour permettre la localisation, soit virtuels s'il s'agit
d'éléments présents naturellement.
13
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Les balises réelles sont dites passives si elles ont pour
but de réfléchir un signal émis par un appareil de mesure
du robot (laser ou infrarouge). Il existe deux méthodes pour utiliser
ces balises pour la localisation du robot : la méthode
télémétrique (calcul de la distance robot/balise), qui
nécessite la présence de deux balises pour calculer la position
du robot dans le plan ; et la méthode par triangulation, qui consiste
à mesurer les angles entre chaque balise et le robot, et qui elle
nécessite l'utilisation de 3 balises.
Figure. I.13 : Localisation absolue
(méthode par triangulation).
Les balises réelles sont dites actives si elles
émettent un signal captable par le robot. En Milieu extérieur, le
système GPS (global positionning system) peut être utilisé
pour obtenir des positions d'une précision de l'ordre du
mètre.
A la base développée par l'armée
américaine dans les années 80 (lancement du premier satellite GPS
en 1978), il fut ouvert aux civils en 1995. Jusqu'en 2000 les mesures
étaient volontairement entachées d'une erreur d'une centaine de
mètres, l'armée américaine craignant que ce système
soit un avantage pour leurs ennemis. Malgré le retrait de cette erreur
volontaire, la précision du système restait de l'ordre du
mètre, à cause des incertitudes sur l'orbite et l'horloge des
satellites, ainsi que les retards engendrés par la traversée des
couches atmosphériques.
Pour améliorer cette précision, nous pouvons
utiliser les GPS différentiels : avec un second récepteur GPS sur
une base fixe et de position connue. Il devient possible de mesurer l'erreur et
d'en déduire la correction à apporter pour la zone environnante,
pour que ce système fonctionne, il faut que la base mobile reste
à une certaine portée de la base fixe. Cette distance varie
suivant la gamme de fréquence utilisée pour l'envoi des
14
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
corrections, et peut atteindre quelques dizaines de
kilomètres pour les besoins de la navigation maritime.
Des satellites géostationnaires permettent
également de corriger certaines erreurs de position. Ils envoient des
corrections sur les orbites et les horloges des satellites GPS.
Ainsi pour l'Europe c'est le système EGNOS (European
Geostationary Navigation Overlay System) qui se charge d'envoyer ces
corrections. La précision atteinte est de l'ordre de 3m. Le
système de GPSRTK (real time kinematics) permet d'améliorer la
précision à quelques centimètres, en utilisant la
différence de phase de l'onde porteuse du signal, sa longueur d'onde
étant d'une vingtaine de centimètres.
En contre partie la portée de la station de
référence avec cette méthode n'est plus que de quelques
kilomètres. Pour augmenter cette portée on a recours au RTK
réseau, qui va utiliser la redondance d'informations pour communiquer
les corrections à l'appareil, via un serveur de calcul à
distance. Les systèmes de localisation GPS sont très
intéressants en rase campagne ou en banlieue.
Cependant ils s'avèrent beaucoup moins efficaces en pleine
ville ou en forêt. En effet pour fonctionner correctement un GPS a besoin
de recevoir les informations de 4 satellites au moins.
La présence d'obstacles tels que les ponts et grands
bâtiments en ville empêche parfois cette réception. Ainsi il
n'est pas rare de perdre la localisation GPS pendant quelques minutes. C'est
pour cela que beaucoup de recherches dans le domaine de la localisation sont
aujourd'hui portées sur les méthodes alternatives au GPS en
milieu urbain. La vision peut être un moyen pour compléter la
localisation par GPS. Ainsi Cappella [6].
Utilise un modèle 3D de la place Stanislas à Nancy
qui est confronté aux images obtenues par les caméras
embarquées sur le robot pour déterminer précisément
sa position. Yang propose d'utiliser les caméras du robot pour mettre au
point un système d'odométrie visuelle [7].
I.8. PLANIFICATION DE TRAJECTOIRE:
* Chemin: Un chemin entre une situation
initiale XI et une situation finale XF est une
représentation géométrique du d'emplacement du corps qui
ne considère pas le temps [8].
I.8.1. Approches polynomiales pour la
génération de trajectoires: Différentes
méthodologies de planification basées sur l'utilisation de
trajectoires Polynomiales. Par exemple, l'utilisation de courbes de type spline
ou B-spline. La trajectoire est conçue en
15
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
prenant en compte les contraintes cinématiques du robot
mobile ainsi que la position des différents obstacles statiques à
éviter.
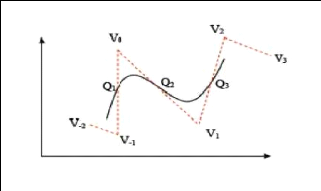
Une trajectoire générée par une courbe
B-spline peut-être représentée à titre d'exemple
comme sur la Figure. I.14.
14 : Courbe B-spline.
résentent les points de passage de la courbe et
t les points qui forment le polygone de contrôle de la
courbe. En pratique pour les robots mobiles de type uni-cycle ou
véhicule, les B-splines cubiques s'avèrent être un choix
suffisant pour définir une trajectoire vérifiant les contraintes
cinématiques.
Une autre famille de trajectoires fréquemment
utilisées pour la planification des robots mobiles non-holonomes est
basée sur l'utilisation des courbes de Bézier.
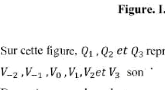
Un exemple de courbe de Bézier cubique est
représenté sur la Figure. I.15.
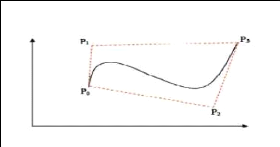
Figure. I.15 : Courbe de Bézier
cubique.
16
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Les points stituent le polygone de contrôle de la courbe
[4].
I.8.2. Carte routière (road map)
:
Cette approche est basée sur l'identification d'un
ensemble de routes dans l'espace libre. La base de cette approche est de
capturer la connectivité de l'espace libre d'un robot dans un
réseau de dimension 1 de courbes ou de lignes appelée carte
routière. Une fois la carte routière construite, elle est
utilisée comme étant un réseau de segments de routes
(chemin) pour la planification des mouvements des robots.
L'objectif de cette approche est de construite un réseau
routière qui rend le robot capable à visiter tous les points
possible de l'environnement libre de navigation. On note qu'il y a deux
approches différentes pour la construction de la carte routière.
Dans le premier cas les routes sont le plus proche possible de l'obstacle,
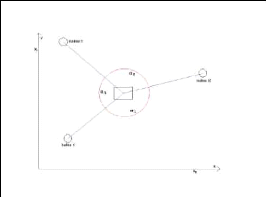
d'où l'appellation de « Graphe de visibilité » les
chemins qui résultent sont de longueur minimum; le deuxième cas
est appelé « diagramme de Voronoi » les routes restent le plus
loin possible de l'obstacle [9].
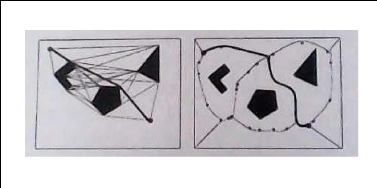
Figure. I.16 : Graphe de visibilité
(à gauche) et diagramme de Voronoi (à droite).
I.8.3. Approche globale: Elle est
utilisée lorsque le robot évolue dans un environnement
entièrement connu. Le principe de cette approche est de capturer la
connexité globale de l'espace libre dans un graphe qui est ensuite
exploré. La connaissance de l'environnement nécessite sa
modélisation:
17
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
I.8.3.1. Approche Par squelette:
Un squelette est une concaténation de portions de courbes.
Il est structuré en un graphe dont les arêtes sont ces portions de
courbes et les noeuds leurs extrémités.
Il existe plusieurs types de squelettes entre autres : les
graphes de visibilités et les `freeways' :
Graphe de visibilité: Les noeuds
du squelette sont les sommets des obstacles, tandis que les arêtes sont
les segments joignant deux à deux les sommets visibles. Les
`freeways': L'espace libre est divisé en un ensemble de
cônes dont les axes constituent les `freeways' que le robot va pouvoir
suivre. Les arêtes du graphe représentent les `freeways', alors
que les noeuds sont leurs extrémités.
Les méthodes se basant sur une approche globale ont
l'avantage de générer un chemin optimal tandis qu'elles ont
l'inconvénient de consommer beaucoup de temps de calcul et d'espace
mémoire [10].
I.8.4. Approche locale : Contrairement
à l'approche globale, cette approche ne nécessite pas une
connaissance a priori de tout l'environnement, mais découvre celui ci au
fur et à mesure à l'aide de systèmes de perception.
Cette approche est itérative (incrémentale). A
chaque itération, on détermine l'incrément du
déplacement. A titre d'exemple on peut citer deux méthodes [10] :
I.8.4.1. Méthodes des champs de potentiel : Le
robot est assimilé à un point plongé dans un champ de
potentiel artificiel. Ce champ de potentiel est défini comme la
combinaison d'un potentiel qui attire le robot vers sa cible et de potentiels
qui l'écartent des différents obstacles. Des améliorations
de cette méthode ont vu le jour après le résultat
satisfaisant qu'elle a donné.
I.8.4.2. Méthode de HUANG: Le
principe de cette méthode est d'essayer de joindre la cible en ligne
droite (reliant les positions initiale et finale). Si un obstacle intervient en
cours du chemin, détecté par les ultrasons placés sur
l'avant du robot, il est alors contourné. Des méthodes similaires
ont été développées au paravent considérant
le robot comme un point matériel et en utilisant d'autres
systèmes de perception, mais ayant toujours un principe semblable.
Une adaptation de la méthode de HUANG
permettant de prendre en compte les contraintes cinématiques du robot a
été testée avec succès.
L'avantage des méthodes utilisant cette approche
réside dans leurs efficacités en termes de temps de calcul qui
permet leurs utilisations dans des applications temps réel. En
18
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
revanche elles présentent l'inconvénient de
tomber dans des minima locaux et de générer une trajectoire
souvent non optimale.
I.8.5. Approche mixte:
L'intérêt de cette approche est de profiter des avantages des deux
approches précédentes, à savoir :
* Temps de calcul faible pour l'approche locale.
* Chemin généré optimal pour l'approche
globale.
L'idée de cette approche est de générer un
chemin optimal, en utilisant une méthode globale, donnant l'allure
générale de la trajectoire à suivre.
Ensuite, le robot exécutera cette trajectoire, à
l'aide d'un générateur local de trajectoire et de son
système de perception, tout en évitant de rentrer en collision
avec des obstacles imprévus au moment de la modélisation
(changements éventuels de l'environnement, obstacles mobiles) [10].
I.8.6. Approches réactives: Les
approches réactives consistent à calculer à chaque pas de
temps (après récupération des informations sur
l'environnement fournies par les capteurs du système) le contrôle
instantané à appliquer sur les actionneurs du système
[11]. I.8.6.1. Planification de mouvement partiel:
Une dernière approche réactive mérite d'être
notée : il s'agit de la planification de mouvement partiel (en anglais :
Partial Motion Planning - PMP utilisée. Celle-ci consiste à
calculer relativement, en un temps de décision fixe, une trajectoire se
rapprochant le plus possible du but. Cette méthode consiste en un
algorithme à trois étapes répète à chaque
pas de temps :
* Mise à jour du modèle de l'environnement
à partir des entrées capteurs du robot.
* Recherche délibérative d'une trajectoire
menant à l'état but. Si le but n'a pas été Atteint
après un temps de décision fixe, la trajectoire calculée
s'en rapprochant le plus est choisie comme trajectoire à suivre.
Enfin, le mouvement planifie au pas de temps
précédent est exécuté. Cette approche permet donc
d'être réactive aux diverses évolutions de l'environnement
tout en étant capable de sortir des impasses non
d'détectées à priori. Elle reste sujette à des
minima locaux, mais en est néanmoins bien plus robuste que les approches
citées précédemment [11].
I.8.6.2. Histogramme de champs de
vecteurs: Dans la lignée des approches par champs de
potentiels, sont apparus les histogrammes par champs de vecteurs (en anglais :
Vector Field Histogram - VFH). Ceux-ci, introduits par Koren et Borenstein sont
nés de la combinaison des champs de potentiels et des grilles
d'occupation [11] :
19
Chapitre I : Généralités Sur Les Robots
Mobiles
Robot Mobile Avec Suivi Visuel De Ligne
Un histogramme basé sur une grille cartésienne de
l'environnement est construit et mis à jour au fur et à mesure de
la navigation afin de reporter la présence d'obstacles à
proximité du robot. Afin de choisir une direction à suivre, un
histogramme polaire est construit à partir de la grille d'occupation :
en discrétisant les différentes directions possibles autour du
robot, l'histogramme polaire est construit en pondérant pour chaque
secteur de la discrétisation polaire les cellules traversées de
la grille d'occupation contenant des obstacles.
Une fois cet histogramme polaire construit, des
»vallées candidates» sont d'exterminés comme les suites
de secteurs contigus de l'histogramme polaire libres d'obstacles La direction
à prendre par le système est alors déterminée par
le milieu de la vallée menant le plus directement au but.
Initialement conçue pour la navigation de robots holonomes
(pouvant naviguer dans toutes les directions), cette méthode a
été étendue à plusieurs reprises afin de prendre en
compte les dimensions du robot (par un espace de configuration implicite) et
ses contraintes de vitesse.Plus tard, les VFH ont été
combinés à une recherche A* (VFH*) afin de trouver un chemin
menant vers le but et d'échapper ainsi aux minima locaux.
Les méthodes VFH disposent néanmoins encore de
fortes limitations : Elles ne prennent en compte ni la dynamique du
système robotique, ni l'éventuelle présence d'obstacles
mobiles ; le mouvement instantané du robot est calculé uniquement
à partir des informations sur la position courante des obstacles. Leur
vitesse n'est en aucun cas considérée.
I.9. EVITEMENT REACTIF D'OBSTACLES:
Dans cette partie, nous faisons un bref état de l'art des
principales méthodes d'évitement réactif d'obstacles afin
de mettre en lumière leurs avantages et leurs limites par rapport aux
spécificités de notre problématique.
I.9.1. Méthodes analytiques:
Même en l'absence d'obstacles, commander un système non holonome
pour l'amener d'une configuration de départ a une configuration
d'arrivée n'est pas une chose aisée. En effet, il n'existe pas
aujourd'hui d'algorithme général permettant de résoudre le
problème pour n'importe quel système non holonome.
Des méthodes analytiques sont connues seulement pour
certaines classes de systèmes. Pour les autres, on ne dispose que de
méthodes numériques. En outre, la présence d'obstacles
rend les méthodes analytiques inapplicables à des systèmes
non holonomes [9].
20
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles

1.9.2. Méthode de fenêtre
dynamique: Cette technique proposée dans travaille dans
l'espace des commandes du robot. La taille du domaine de recherche des vitesses
accessibles (c'est-a-dire n'entrainant pas de collisions) est réduite
par la prise en compte explicite du modèle cinématique du
système. Les commandes envoyées au robot sont le résultat
de la maximisation sur ce domaine de recherche d'une fonction cout liée
à la configuration finale.
L'utilisation de cette méthode est très
intéressante pour un robot se déplaçant rapidement ou pour
un robot ayant des capacités d'accélération et de
décélération limitées. Elle permet alors de
produire un déplacement du robot sur et régulier. Son extension
au cadre multi robots est cependant très délicate du fait de son
manque de flexibilité [4]. I.10. POURSUITE DE
TRAJECTOIRE:
Une fois la trajectoire du robot déterminée dans le
contexte de l'évitement d'obstacle ou non, il faut pouvoir la suivre. Le
problème de suivi d'une trajectoire de référence pour un
robot mobile non-holonome est apparu comme un problème de premier ordre
pour la communauté roboticienne dans ces dernières
années.
En effet, la forte utilisation des robots mobiles dans les
domaines où l'être humain ne peut pas être présent,
notamment dans les sites nucléaires à haut risque ou dans le cas
de l'exploration spatiale, nécessite la mise en oeuvre de lois de
commande autonomes et performantes pour assurer les tâches
assignées aux robots. Plusieurs travaux concernant la poursuite de
trajectoire ont été développés dans ce contexte.
Après une rapide formalisation de ce problème, une liste non
exhaustive des différentes commandes disponibles dans la
littérature est présentée [4].
Formulation du problème: Une
propriété des modèles de robot mobile non-holonome (de
type voiture ou uni-cycle) est qu'ils ne sont pas stables par un retour
d'état continu et stationnaire. Ce corollaire est le
résultat des travaux de [4].
Figure. I.17 : Poursuite de trajectoires
admissibles.
21
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
I.11. EXEMPLES D'APPLICATIONS:
Aujourd'hui, le marché commercial de la robotique mobile
est toujours relativement restreint, mais il existe de nombreuses perspectives
de développement qui en feront probablement un domaine important dans le
futur.
Les applications des robots peuvent se trouver dans de nombreuses
activités "ennuyeuses, salissantes ou dangereuses" (3 D's en anglais
pour Dull, Dirty, Dangereuse), mais également pour des applications
ludiques ou de service, comme l'assistance aux personnes âgées ou
handicapées. Parmi les domaines concernés, citons [12] :
La robotique de service (hôpital, bureaux).
La robotique de loisir (aibo, robot 'compagnon').
La robotique industrielle ou agricole (entrepôts,
récolte de productions agricoles, mines).
La robotique en environnement dangereux (spatial, industriel,
militaire).
Figure. I.18 : Genghis,
développé par Rodney Brooks au MIT au début des
années 1990.
A cela, s'ajoute à l'heure actuelle des nombreuses
plates-formes conçues essentiellement
Pour les laboratoires de recherche.
La Figure. I.19 montre quelques exemples de
robot réels
22
Robot Mobile Avec Suivi Visuel De Ligne

Chapitre I : Généralités Sur Les Robots
Mobiles
Figure. I.19: Exemples de robots
utilisés dans différentes applications.
I.12. LES TACTIQUE DE NAVIGATION DES ROBOTS
MOBILES:
On peut classer ces tactiques en trois groupes, suivant que le
robot ne connait rien de son univers de déplacement (robots
télémétriques sans mémoires), qu'il le connait
totalement (univers connu) ou qu'il le découvre au fur et à
mesure de son déplacement (navigation optimisée et interactive
avec l'environnement) [8].
I.12.1. Robots télémétriques
sans mémoire: Il s'agit de robots qui cherchent à
se déplacer dans un univers inconnu pour atteindre un but, en
évitant les obstacles à l'aide d'un
télémètre à courte ou à longue portée
(tactile, ultrasonore ou infrarouge).Pour ce faire, ils sont
munis des primitives suivantes:
Aller en ligne droite sur une longueur donnée.
Tourner d'un angle donné.
Viser au télémètre dans une direction
donnée.
23
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
Certains de ces robots peuvent se repérer par rapport au
but, à la fois en direction et en distance Comme ils n'ont pas la
mémoire de l'environnement, il n'est pas possible de planifier au
départ leur chemin, ni leur donner des informations sur cet
environnement.
Néanmoins ils possèdent quelques mots de
mémoires qui leur permettent de discriminer l'enchainement des taches
à accomplir.
I.12.2. Optimisation de trajectoires dans un univers
connu : Dans ce cas, l'univers, connu parfaitement, est
modélisé soit par une grille, soit par des polygones. La
modélisation par grille a été utilisée dans les
premiers travaux de recherche d'un chemin optimal car cette
représentation se prête bien à une programmation directe,
La robot occupant une case ou étant modélisés par des
cases hachurées.
L'univers est ainsi représenté par une matrice,
appelée matrice d'adjacence, dont les éléments sont 0 ou 1
suivant que le case correspondante est libre ou occupée par un obstacle
.Le déplacement du robot n'est en générale permis que
suivant quatre directions perpendiculaires (horizontales et verticale ou huit
directions (à 45 ), suivant une direction quelconque.
Dans le modèle des polygones, les obstacles sont
modélisés par des polygones dont il suffit de connaitre la
position des sommets pour que l'environnement soit parfaitement définit
.Dans cette représentation, qui requiert moins de mémoire que la
précédente, le chemin est constitué de segments joignant
différents sommets de polygones .Ce chemin sera optimal lorsque la somme
des couts des arcs constituant le chemin dans le graphe (dont les noeuds sont
les sommets des polygones) sera minimale.
I.12.3. Tactiques de navigation optimisées et
interactives avec l'environnement:
Ces tactiques s'appliquent aux cas réels fréquents
ou l'environnement du robot n'est pas entièrement connu, soit à
cause des limites de son organe de vision, soit parce que des obstacles ont pu
être ajoutés à l'environnement initiale
mémorisé, soit encore par suite de l'imprécision dans la
localisation du robot.
Il en résulte une combinaison des tactiques
décrites précédemment .Au départ étant
donné la connaissance de l'environnement dont dispose le robot, une
trajectoire optimale est planifiée et le robot commence à le
suivre .En cas de détection imprévue d'un obstacle,
le robot met en action son opérateur de vision pour
réactualiser son modèle d'environnement, puis la procédure
précédente est réitérée (optimisation, suivi
de la trajectoire, vision).
24
Robot Mobile Avec Suivi Visuel De Ligne
Chapitre I : Généralités Sur Les Robots
Mobiles
I.13. CONCLUSION:
La perception d'une part et la commande au sens large de l'autre
part sont donc les deux thèmes majeurs de recherche pour obtenir un
robot mobile parfaitement autonome. Parmi les problématiques
liées à la commande, celle de la navigation qui tient un
rôle important : elle consiste à déterminer les
trajectoires que le robot sera capable de suivre pour lui permettre
d'évoluer correctement au milieu d'obstacles.
25
Robot Mobile Avec Suivi Visuel De Ligne

Traitement d'images-Navigation
Chapitre II : Traitement D'images
Numérique-Navigation
| 

