Chapitre 4 : DESCRIPTION DE L'ARCHITECTURE
DU
PROGRAMME
Intervalle d'intégration
Equation différentielle d'ordre n
Changement des variables
Système d'équations
différentielles
d'ordre 1
[Y']=f ([Y])
Intégration du système
Vecteur [Y]
Conditions initiales
1. Généralités
1.1 But du chapitre
Ce chapitre a pour but de décrire et représenter
l'enchaînement des opérations à
effectuer par ordre chronologique dans l'exécution du
programme.
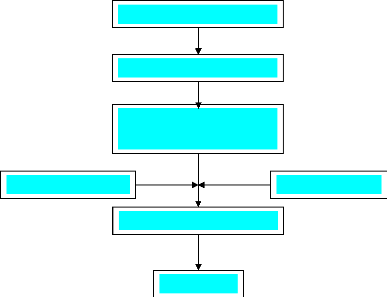
1.2 Résolution numérique d'une
équation différentielle ordinaire d'ordre n Pour résoudre
numériquement une équation différentielle ordinaire, on
suit les
étapes suivantes :
· Changement de variables ;
· Transformation de l'équation en un système
d'équations différentielles d'ordre un ;
· Intégration du système avec un solveur
ode.
En résumé, on a :
1.3. Développement des intégrateurs
numériques utilisés par le logiciel MATLAB
1. Forme canonique d'une EDO (équation
différentielle ordinaire).
Equation : f ( y , t )
dy =
dt
|
(126)
|
|
Condition initiale : y ( t o )
= yo
Solution exacte : y = F (t)
Ou bien = + ?
t
f (y , t )dt
(127)
0
2. Transformation vers une forme canonique
d z
2
n - 1
dz d z
n d z
Soit l'équation : = G z

( , , ,..., 1 , )
t

n dt 2
dt dt dt n -

y 2
1 =
dt
dt
n
n
d
dy
z
=
dt
n
dt
z y
= 1
dz
dy
On posera :
n
-
dy
dt
1 =
y n
1
-
n
d
z
=
1
-
n
dt
(128)
f
( t , y)
Si :
dy
=
dt
y t o= yo
t
(129)
alors, la solution exacte sera : = + ?
y t y o f t y dt
( ) ( , )
0
Pour une solution numérique yj ,
l'erreur commise sera : e j = yj-y( t
j) (130)
3. Méthodes à pas constant
1) Méthode d'EULER ou de la tangente
Soit à résoudre l'équation
différentielle :
Considérons le développement de TAYLOR de
y(t) autour de to, qui s'écrit
:
) (131)
n
y t
' ' ( ) y t
( ) ( )
o n o
y t y t
( ) ( ) ( ) . ' ( ) ( ) .
2
= + -
t t y t + -
t t + + -
( ) .
t t + R t
n (
o o o o o
n
2! !
En se limitant à l'ordre 1 dans ce développement,
on a :
y ( t ) = y(t o
) + ( t - t o ) .y ' ( t
o) (132)
Ou bien :
y n + = y n + h f t
n y n (133)
. ( , )
1
Avec :
h = t n +1 -t n (134)
Les expressions (133) et (134) définissent la
méthode d'EULER. Elle revient à estimer la solution au
voisinage de tn sur la tangente à la fonction f
(t, y). Elle est assez précise pour des pas petits.
2) Méthode de HEUN
C'est une méthode en 4 étapes qui sont :
· Calcul de la fonction f en tj-1 :
k1 = f( t j -1, y j
-1) (135)
· Calcul de yj* par la méthode
de EULER explicite :
y j * = y j - + h.k
(136)
1 1
· Calcul de la pente en (tj , yj *) :
k2 = f(t j , y
j ) (137)
· Calcul final de la solution finale entre k1 et
k2 :
y j y j
= - 1
|
k k
+
1 2
+ h . (138)
2
|
|
3) Méthodes de RUNGE-KUTTA (RK)-ODE 23 et ODE
45
Elles sont une amélioration de la méthode de HEUN
et elles font la moyenne entre m
pentes.
Formule générique :
y j = y+ w1. k
1 + w2 .k 2 + +
wm.k m (139)
Avec :
k1 = f ( t j -1, y j-1)
k 2 = f ( t +
c2.h , y + a21.k1
|
)
|
|
)
k = f t j - + c h y j - + a k
+ a k
( . , . .
3 1 3 1 31 1 32 2
k f t
= ( + c h y
. , + a k a k
. + . ....
+ + a . )
k (140)
m j - 1 m j - 1 m 1 1 m 2 2
m m
( 1 )
- m - 1
L'ordre m de la méthode dépend de l'ordre
du développement de la série de TAYLOR
correspondante.
Les termes wi, ci et ai sont
choisi par identification avec les termes du développement de
TAYLOR à l'ordre m. Pour faire cette
identification, on arrive toujours à un système de n
équations à n+1 inconnues. On doit alors fixer un
paramètre au choix, lequel choix étant fait de manière
à minimiser l'erreur d'intégration.
On voit bien que la méthode de
HEUN est une méthode de RK d'ordre 2 avec
c2=a21=1, w1= w2=1/2.
La méthode de RK d'ordre 4(RK4), s'écrit :
1 1 1 1
y j y j h k k k k
= - +

1 .( 1 + + + ) (141)
2 3 4
6 3 3 6
Avec :
k1 = f ( t j -1 , y j-1)
)
)
k 2 = f( t +h
,y + h .
2 j2
k 3 = f( t +h 2
j2
, y + h k2
km = f( t j -
1+ h,y j - 1+
h.k3 ) (142)
La précision de la méthode dépend de
l'ordre, cependant l'utilisation d'ordres supérieurs n'est pas
très intéressante. Cette précision augmente lorsque le pas
h diminue. [3.3]
4. Méthode à pas variable
C'est une méthode numérique qui ajuste le pas
d'intégration au cours de la résolution. Pour cela, il faut
estimer l'erreur commise à chaque pas d'intégration. Si l'erreur
d'intégration est trop grande, par rapport à un critère
fixé, alors on réduit le pas h. Si l'erreur est petite,
par rapport au même critère, on peut alors se permettre
d'augmenter le pas pour aller plus vite. Deux solutions sont en vue :
· Solution 1 : Calculer une solution à un
point donné avec deux valeurs de h différentes :
o Si le résultat est le même, alors on conserve la
valeur grande de h pour le pas suivant ;
o Si le résultat est différent, on suppose que le
meilleur résultat est obtenu avec la petite valeur de h qu'on conserve
pour le pas suivant.
· Solution 2 : Utiliser deux méthodes en
parallèle avec le même pas h mais avec des ordres
différents.
Cette solution nous conduit aux solveurs ODE
45 et ODE 23 implantés dans
MATLAB :
o ODE 23 : C'est la méthode de
RK-FEHLBERG 23 qui utilise les méthodes de
RK d'ordres 2 et 3 :
On calcule successivement yjavec RK2,
yj* avec RK3 et ?j = yj - yj* (avec un
même pas h) :
Si la valeur de ?j est inférieure à la
tolérance fixée, alors on accepte yj tout en maintenant
h ;
Si la valeur ?j est très petite que la
tolérance fixée, alors on accepte yj et on augmente
h ;
Si la valeur de ?j est supérieure à la
tolérance fixée, alors on recommence avec h plus
petit.
Comme c'est la méthode numérique qui choisit le
pas, on n'a pas la
solution aux temps désirés. Il est alors
nécessaire d'interpoler les résultats.
Cet intégrateur a un bas niveau d'exactitude et est
utilisé pour des problèmes non raides avec tolérances
brutes ou pour résoudre des problèmes modérément
raides.[]
o ODE 45 : Ici les ordres sont 4 et
5. Cet intégrateur est employé la majeur partie du temps et il
est le premier en vue pour tout problème. Il a un niveau moyen
d'exactitude. [3.3], []

Pour ces deux méthodes, le pas d'intégration est
fixé de manière à avoir :
ô -< max(Re lTol *
yj ,AbsTol) (143)
ti étant une estimation de l'erreur locale produite par la
méthode numérique .
La tolérance relative (RelTol) et la tolérance
absolue (AbsTol) sont respectivement 1e-3 et 1e-6 par
défaut.
5. Méthodes à pas liés
Elles consistent à évaluer yj à
partir de plusieures valeurs yj-1, yj-2,....yj-k
:
tj

k
-
tj
Avec ces méthodes, f(t,y) sera
évalué avec un polynôme d'interpolation. 1)
Méthode ouverte
On utilise les k+1 dernières valeurs de
f pour construire un polynôme de degrés
k(fn, fn- 1, fn-2,..., fn-k+1), lequel sera utilisé
pour déduire la valeur de la fonction f en n+1 (une
extrapolation). C'est la méthode d'ADAMS - BASHFORH (à pas
fixe).
Pour k=1 :
y n + 1 = yn + h.f ( y
n) (145)
Pour k=2 :
y j = yj-k + ? f( t , y ) dt (144)
3 1
2
y n + 1 = y n h . 2
.f( y n ) - .f(
yn-01] (146)
Pour k=3 :
= + ? 23 16 5 ?
y y h f y
. . ( ) - . ( )
f y + . ( )
f y (147)
n + 1 n n n - 1 n - 2
?? 12 12 12 ??
Pour k=4 :
? 55 59 37 9 ?
y = +
y h f y
. . ( ) - . ( )
f y + . ( )
f y - . ( )
f y (148)
n + 1 n n n - 1 n - 2 n -
3
?? 24 24 24 24 ??
2) Méthode fermée
Contrairement à la méthode ouverte, on utilise
cette fois le point qu'on cherche dans la détermination du
polynôme d'interpolation de degré
k+1(fn+1, fn, fn-1, fn-2,...,
fn-k+1). La méthode étant implicite, la résolution
est donc lourde. C'est la méthode d'ADAMS -
MOULTON (à pas fixe).
Pour k=0 :
y n + 1 = yn + h. f
( y n +1) (149)
Pour k=1 :
1 1 ?
y y h f y
+ = + ? + +
. . ( ) . ( )
f y (150)
n 1 n n 1 n
?? 2 2 ??
Pour k=2 :
= + ? 5 8 1 ?
y y h f y
. . ( ) + . ( )
f y - . ( )
f y (151)
n + 1 n n + 1 n n - 1
?? 12 12 12 ??
Pour k=3 :
? 9 19 5 1 ?
y = +
y h f y
. . ( ) + . ( )
f y - . ( )
f y + . ( )
f y (152)
n + 1 n n + 1 n n - 1 n -
2
?? 24 24 24 24 ??
3) Méthode prédicteur - correcteur-ODE
113
Dans cette méthode, on utilise les avantages des
méthodes ouvertes et fermées. Elle s'effectue en trois
étapes :
· Etape 1 : Phase de prédiction :
^
On prédit une valeur 1
y n + de par la méthode ouverte ;
· Etape 2 : Phase d'évaluation :
^ ^
)
f n + = f t n + y n +
( , 1
1 1
· Etape 3 : Phase de correction :
^
On corrige la valeur de 1
y n +
^
.
en utilisant 1
f n +
Amélioration :
par une méthode fermée pour trouver
yn+1
o La phase de correction peut être
répétée plusieurs fois ;
o Usage d'une méthode à pas variable ;
o Usage d'une méthode à ordre du polynôme
d'interpolation variable. Cette méthode a pour inconvénient
majeur quelle n'est pas auto démarrante.
Si l'ordre est 1, la méthode est dite de EULER
modifiée.
y n + prédit = y n +
h f t n y n
1 , . ( , ) (153)
y corrigé y h f t y prédit
, = + . ( , , ) (154)
n + 1 n n + 1 n + 1
Le solveur ODE 113 de MATLAB
utilise la méthode prédicteur - correcteur (méthode
d'ADAMS - BASHFORTH - MOULTON à pas variable
et ordre de polynôme variable entre 1 et 13). Il est utilisé pour
des problèmes non raides avec des tolérances rigoureuses ou pour
résoudre des problèmes intensifs avec une exactitude allant du
niveau bas au haut niveau
A forte précision demandée, le solveur
ODE 113 est plus rapide, tandis qu'à faible
précision, les solveurs ODE 23 et
45 sont plus rapides.
6. Méthodes « stiff »
1) Equation différentielle « stiff
»
Un système d'équations différentielles est
« stiff » ou raide quand les dynamiques qu'il représente sont
à la fois très lentes et très rapides.
1 f y y y t
= 1 ( 1 , 2 ,..., , )
n
dt
dy
2 f y y y t
= 2 ( 1 , 2 ,..., , )
n
f ( y 1 , y 2
,..., y , t )
n n
(155)
dy n
dt
dy
dt
La matrice jacobienne de ce système s'écrira :
. ?
dy n ?
.... ?
?
df n
. ?
dy ? ?
n
df ?
1


(156)
df1

1
dy
df n

1
dy
Pour laquelle on calculera les valeurs propres. Pour cette
méthode, il faut intégrer sur une longueur importante à
cause des dynamiques lentes, avec de petits pas en raison des dynamiques
rapides. C'est une méthode inefficace et de fois infiniment longue.
2) Méthode de GEAR (ou BDF : backward
differentiation formulas)
Par cette méthode, on cherche à interpoler la
fonction y(t) grâce aux valeurs précédentes (
yn+1, yn, yn-1, yn-2, ,yn-k+1) avec un
polynôme d'interpolation noté q(t). Il y' a donc une
contrainte supplémentaire :
q'(tn+1)=f(tn+1)
c'est une méthode à pas d'intégration et
ordre variables.
Pour k=1 :
y n+ 1 = yn + h. f
( y n +1) (157)
Pour k=2 :
3 1
h
f y n + = y n + - y n +
y n - . ( ) 2 (158)
1 1
2 2 1
Pour k=3 :
11 3 1
h f y
. ( ) = y - +
3 y y - y (159)
n + 1 n + 1 n n - 1 n - 2
6 2 3
Pour k=4 :
25 4 1
h f y
. ( ) = y - 4 3
y y
+ - y + y (160)
n + 1 n + 1 n n - 1 n - 2
n - 3
12 3 4
Pour k=5 :
137 10 5 1
h f y
. ( ) = y - +
5 5

y y - y + y - y (161)
n + 1 n + 1 n n - 1 n - 2
n - 3 n - 4
60 3 4 5
Pour k=6 :
147 15 20 15 6 1
h f y
. ( ) = y - 6 y + y - y
+ y - y + y (162)
n + 1 n + 1 n n - 1 n - 2
n - 3 n - 4 n - 5
60 2 3 4 5 6
3) ODE 15s
Ce solveur est une amélioration de la méthode
de GEAR. C'est une méthode à pas variable et ordre
variable entre 1 et 6, avec une exactitude allant du bas niveau à un
niveau moyen. On l'emploi généralement lorsque
l'ODE45 est lent.
4) ODE 23s
Il permet la résolution des problèmes raides, avec
un bas niveau d'exactitude. 4) ODE 23t
Il permet la résolution des problèmes
modérément raides, avec un bas niveau d'exactitude.
5) ODE 23tb
Il permet la résolution des problèmes raides, avec
un bas niveau d'exactitude.
2. Fichier parametresrobot.m
C'est un script dans lequel on affecte des valeurs aux
différents paramètres du robot et aux entrées de la
fonction dynamique_moteurCC. Comme ces entrées doivent varier
dans le temps, la contrainte est qu'il faut qu'elles aient ( + 1 )
tfin valeurs, avec tfin qui est le temps
d'intégration et
h
h le pas d'intégration. Pour saisir
facilement ces entrées, nous allons générer 4 tranches de
di ou di1 valeurs chacune, et ce, partant de leurs bornes et
ensuite faire la concaténation de liste. Ce fichier est repris en annexe
3.
di = entier le plus proche de )
( h
tfin (163)
4 .
tfin
di 1 = -3* di+1 (164)
h
3. Fichier dynamiquemoteurCC.m
Les entrées sont les courants et les sorties, les
couples moteurs. Après la déclaration des variables et
différents paramètres du robot, la fonction parametres_robot
est appelée et les couples sont calculés par la relation
(94) et (95), pour finir par la visualisation de ces couples en fonction du
temps.
Début
Déclaration des variables globales
Calcul de K, C1 et C3

Affichage des résultats
Fin
4 Fichier bouclerobot.m
Dans ce script, nous faisons le traitement dynamique et
cinématique du robot. Il s'agit ici de trouver les angles de rotation de
rotation des roues et les différentes réactions connaissant les
couples appliqués aux moteurs, sortis de dynamique_moteurCC
(traitement dynamique) et, des angles de rotation des roues, trouver les
positions, les vitesses, les accélérations et l'orientation du
robot. Nous avons été contraint de faire les deux traitements
dans une même boucle par la non linéarité des
équations (alpha dépend des ces angles). Ses temps forts sont
:
· Déclaration des différents
paramètres globaux ;
· Initialisation de la variable t, faisant office du temps
dans les différents calculs, du compteur i et des conditions initiales
;
· Création des matrices de dimensions
adéquates pour le stockage des différentes sorties ;
· Tant que t=120 secondes, les opérations
suivantes seront exécutées :
o i=i+1 : actualisation du compteur ;
o Affectation de la valeur de C1(i) et C3 (i) aux
couple de calcul C1c, C3c , valeurs à considérer dans
les calculs au temps t ;
o Calcul des valeurs des réactions au temps t par les
relations (80), (81), (82), (83), (84), (85), (86), (87), (88), (118), (119),
(120), (121), (123), (124) et (125);
o Lancement de l'intégration de la dynamique avec le
solveur ODE45 ; o Mémorisation de la valeur actuelle de yd
dans la matrice sorties_d ;
o Mémorisation des valeurs des réactions dans
des matrices respectives ; o Lancement de l'intégration de la
cinématique avec le solveur ODE45 ; o Mémorisation de la
valeur actuelle de yc dans la matrice sorties_c ;
o Calcul de alpha au temps t (alp) et de ses deux
dérivées (dalp et ddalp) ;
o Mémorisation de la valeur actuelle de alp et dalp
dans leurs matrices
respectives ;
o Mémorisation de la valeur actuelle de t dans
la liste temps ;
o fin de la boucle
· Calcul des positions, vitesses et
accélérations du robot ;
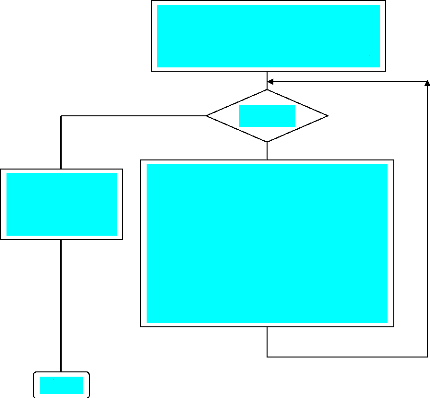
Calcul des positions, vitesses et
accélérations du robot.
Fin
i=i+1 ;
affectation des couples de calcul ;
calcul des réactions ;
lancement de l'intégration dynamique ; Mémorisation
de la valeur actuelle de yd dans la matrice sorties_d ;
Lancement de l'intégration cinématique ;
Mémorisation de la valeur actuelle de yc dans la matrice
sorties_c ;
Calcul de alp, dalp et ddalp ;
t=t+h
mémorisation du temps ;
t=0 ;
i=0 ;
conditions initiales ;
création
des matrices sorties_d et sorties_c ;
t=tfin-h
Le script possède 2 fonctions internes dans lesquelles
les équations à intégrer{(5) et (6) pour la
cinématique, (97) et (98) pour la dynamique} ont été
définies. Son ordinogramme est le suivant :
Début
Déclaration des
paramètres du
modèle
Appel des paramètres du robot et des
entrées
du modèle
A l'instant initial, toutes les réactions sont nulles
sauf R3, R6, R7, R11, R12, R14 et R16.Leurs valeurs sont obtenues en traduisant
l'équilibre statique du robot (figures 5, 6, 7 et 8).
Mg l
.
R R mg
3 = = +
16 (165)
2 . ( )
l e
+
Mg l
.
R R
6 = =
11 l e (166)
2 . ( )
+
Mg l r
. .
R R
= = (167)
7 12 2 . ( )
l e
+
Mg e
.
R 14 l
e
= (168)
( )
+
5. Fichier robotmobile.m
Ce modèle a pour entrées les courants ia1 et ia3
et pour sorties les accélérations, les vitesses et les positions
du robot (aG, vG et rG). Il a la structure suivante :
ia1 ia3
Dynamique moteur
CC

C1
C3
Dérivation
Dynamique robot
Cinématique robot
?
aG
á
?
rG
?
vG
L'ordinogramme du modèle est le suivant :
| 

