àtude des différentes lois de commande pour un robot manipulateur à 6DDL comportant une liaison prismatique( Télécharger le fichier original )par Sabah CHEMAMI Université Larbi Ben Mhidi de Oum El Bouaghi Algérie - Magister 2009 |

III.3. Vitesse et accélération inverses
C'est peut-être un peu
étonnant que les rapports inverses de vitesse et
d'accélération sont conceptuellement plus simples que la position
inverse. Rappel de
(III-2) que les vitesses articulaires et les
vitesses de terminal sont relié par la jacobienne en tant que Ainsi le problème inverse de vitesse devient :
qui est conceptuellement simple dans le cas régulier
où la matrice jacobienne est carrée d'ordre Différencier (III-2) donne les équations d'accélération : Ainsi, donné le vecteur des
accélérations de terminal Pour les manipulateurs 6ddl les équations de vitesses et d'accélérations articulaires peuvent être donc écrit comme suit : La matrice
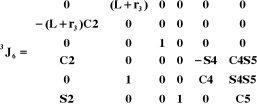
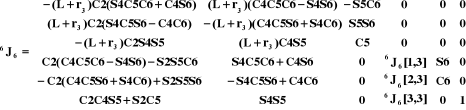
III.4. Application sur le robot choisiIII.4.1. calcul de la jacobienne géométriqueA partir de la relation (III-10) et des résultats
obtenus par le MGD on a calculé la jacobienne dans des différents
repères :
Avec : Puisque les cordonnées opérationnelles sont les
cordonnées de la position de l'outil dans le repère R
F , les vitesses qu'on doit calculer sont En appliquant la relation (III-2), on trouve que : avec : où :
et on peut conclure donc que :
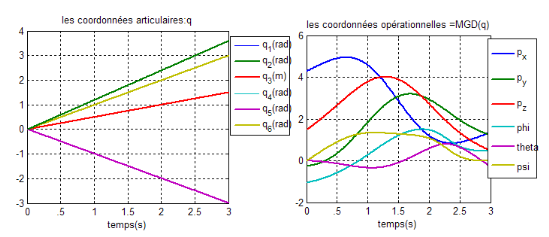
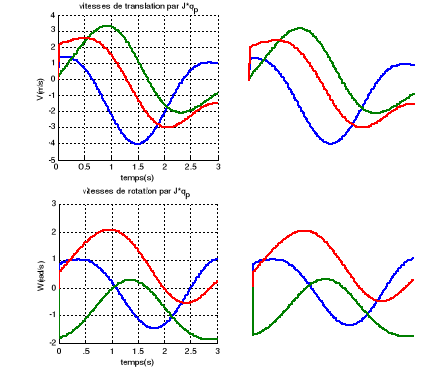
A partir de (III-11) on a pu calculé les vitesses Afin de vérifier les résultats trouvés ainsi que la jocobienne, on a fait une comparaison entre les vitesses calculées par la relation (III-28) et celles calculées par la méthode de récurrence. le programme est réalisé sous Matlab et l'application sous Simulink Les coordonnées articulaires utilisées dans ce programme ainsi que les coordonnées opérationnelles correspondantes sont celles de la figure (III.2). La figure (III.3) montre bien que les mêmes valeurs sont obtenues par les deux méthodes, ainsi on a pu valider la jacobienne calculée.
Figure III.2. Les coordonnées articulaires et les coordonnées opérationnelles correspondantes
Figure III.3. Les vitesses calculées par les deux méthodes ; équations de récurrence, et la jacobienne |
|



 (III-23)
(III-23) et son déterminant est non nul.
et son déterminant est non nul.  (III-24)
(III-24) , le vecteur d'accélération articulaire
, le vecteur d'accélération articulaire  est donné comme solution de :
est donné comme solution de : où :
où :  (III-25)
(III-25) (III-26)
(III-26) doit être remplacée par la jacobienne analytique
doit être remplacée par la jacobienne analytique , dans le cas où on n'a pas présenté la rotation
par les cosinus directeurs. Dans ce cas on a :
, dans le cas où on n'a pas présenté la rotation
par les cosinus directeurs. Dans ce cas on a : (III-27)
(III-27)
 en utilisant le logiciel Maple.
en utilisant le logiciel Maple. 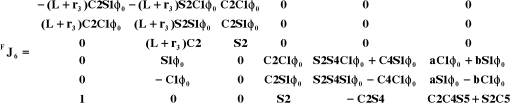

 et
et  .
.

 (III-30)
(III-30) (III-31)
(III-31)
 (III-33)
(III-33) et
et  , ensuite on les a remplacées dans l'équation (III-32)
pour trouver les vitesses cherchées.
, ensuite on les a remplacées dans l'équation (III-32)
pour trouver les vitesses cherchées.