|
Année académique : 2015-2016
REPUBLIQUE DU CAMEROUN REPUBLIC OF CAMEROON
***************** ******************
Paix-Travail-Patrie Peace-Work-Fatherland
********** **************
MINISTERE DE L'ENSEIGNEMENT SUPERIEUR MINISTRY OF HIGHER
EDUCATION

************************ ********************
UNIVERSITE DE DOUALA
ECOLE DOCTORALE DES SCIENCES FONDAMENTALES ET
APPLIQUEES
(ED-SFA)
UNITE DE FORMATION DOCTORALE DES SCIENCES DE L'INGENIEUR
(UFD-SI)
LABORATOIRE DE MECANIQUE ET PRODUCTIQUE (LMP)
AXE 1 : CAO & STRUCTURES
MEMOIRE DE MASTER II/DEA
Présenté par :
BETENE OMGBA Achille Désiré
(15S5477)
DIPET II en Construction Mécanique
Sur le
thème :

Présenté le 23 Mai 2017, à l'ENSET de
Douala, salle SD1, devant le jury :
Prof. NJEUGNA E. Professeur à l'Université de
Douala (ENSET) Président
Prof. ATANGANA A. Maître de Conférence à
l'Université de Douala (ENSET) Directeur de mémoire
Dr. DJUINA André Chargé de Cours à
l'Université de Douala (ENSET) Examinateur
Dr. BETENE EBANDA Chargé de Cours à
l'Université de Douala (ENSET) Examinateur
DEDICACE
A mon fils,
II
James Léon Marvel NTSAMA BETENE
iii
REMERCIEMENTS
Les travaux de recherche présentés dans ce
mémoire de Master II/DEA ont été menés de Juillet
2016 à Décembre 2016, à l'Université de Douala au
sein de l'Unité de Formation Doctorale des Sciences de
l'Ingénieur, de l'Ecole Doctorale des Sciences fondamentales et
appliquées, Laboratoire de Mécanique et Productique.
Je tiens à remercier tout d'abord mon Directeur de
mémoire, Professeur Jean A. ATANGANA de m'avoir attribué ce
thème de mémoire qui m'a fait découvrir le domaine
passionnant du comportement des flèches en vibration. Je voudrais lui
témoigner ma profonde gratitude pour sa disponibilité, sa rigueur
Scientifique et pour l'ambiance conviviale de travail qui a régné
au cours du déroulement de ce mémoire, sans oublié
l'admirable travail qu'il abat pour le suivi du planning de ce programme
d'étude au sein de son auguste Laboratoire. Il m'a beaucoup
apporté dans l'aboutissement de ce travail par ses encouragements, ses
éclaircissements ainsi que nos précieux échanges tant d'un
point de vue numérique que théorique.
J'adresse également mes sincères remerciements
au Pr. NJEUGNA Ebenezer et au Dr. DJUINA André pour avoir accepté
d'examiner mes travaux de mémoire. Qu'il me soit permis de leur exprimer
ici ma profonde gratitude.
J'adresse mes remerciements au Dr BETENE Fabien pour son aide
et ses conseils en matière d'expertise sur les matériaux
composites et pour la motivation sans faille qu'il a assigné en moi pour
l'accomplissement de ce travail, ce fut un grand plaisir de collaborer
ensemble.
J'adresse mes remerciements au Dr. NOAH Pierre pour ses
multiples conseils tant sur le plan des matériaux composites que sur le
plan de la recherche des Sciences de l'Ingénieur.
Je remercie Monsieur le Coordonnateur de l'Ecole Doctorale des
Sciences Fondamentales, le Professeur MOUKENGUE pour sa brillante coordination
et à sa bienveillance sur la tenue du planning des activités de
Master II recherche/DEA.
Je remercie tous les enseignants de l'Unité de
Formation Doctorale, pour leur disponibilité à la dispense des
unités de valeurs.
Mes chaleureux remerciements vont à toute ma famille
pour son soutien moral indéfectible, en particulier M. OMGBA Pierre, Mme
NGONO BETENE, M. NTSAMA Serge et Mlle. ABOMO Chantale.
Je remercie personnellement ASSOMO Pélagie, pour sa
patience, sa motivation et sa compréhension dans l'accomplissement de ce
travail.
Je remercie mes camarades de promotion et toute personne de
près ou de loin ayant contribué à l'accomplissement de ce
travail.
RESUME
Les performances séduisantes des composites
entraînent de jour en jour leur intégration dans la
réalisation et l'optimisation des ouvrages industriels,
aéronautique, automobile, architecture, génie civil et sport. Une
fois intégré dans une structure sous forme de poutre, plaque ou
coque, ces composites subissent des comportements dynamiques en particulier des
vibrations transversales de flexion. Pour le concepteur, ce comportement doit
être prédit et garanti au cours de la conception, par une bonne
modélisation des déplacements des points de la structure. Aussi,
au LMP, au LAMMA et au Génie Mécanique de l'ENSET de Douala, les
composites se font développés, mais une véritable
modélisation comportementale n'est pas encore effectuée en
particulier l'aspect vibratoire. Ce sont les raisons pour lesquelles, nous
avons mené ces travaux portant sur « l'étude du
comportement de la flèche d'un matériau composite en vibration
mécanique et simulation sous Matlab ».
Face à la pluridisciplinarité des
sollicitations, nous avons restreint l'étude à des structures
composites de types plis unidirectionnel à 0° ou 90° et
stratifié croisé symétrique ou antisymétrique
[0/90]S vibrantes et sollicitées en flexion pure. L'objectif principal
poursuivi au cours de cette recherche est de prédire le comportement de
la flèche d'une structure orthotrope renforcée par des fibres
végétales locales. Pour y parvenir, des études analytique
et numérique ont été menées. La résolution
analytique faite au moyen des méthodes de séparation des
variables, puis de Rayleigh-Ritz de l'équation de mouvement transverse
exprimée par la Théorie Classique des Stratifiés (TCS)
formulée sur le modèle des plaques de Love-Kirchhoff puis,
étendue sur le modèle des poutres de Euler-Bernoulli nous a
permis d'obtenir les équations de comportement de la flèche de
différentes structures avec diverses conditions aux limites. La
modélisation numérique a d'abord fait l'objet, de simulation sous
Matlab en introduisant les équations de la flèche
formulées analytiquement, les paramètres d'un composite à
matrice polyester, renforcé par des fibres de Rhecktophyllum camerunense
(RC), ensuite, sur la simulation numérique par éléments
finis sous Abaqus du même composite et enfin sur la mise sur pieds du
logiciel Inflexion - Vibration Arrow Composite (i-VAC) qui permet de
prédire le comportement de la flèche des composites
étudiés dans le cadre de ce travail.
Les résultats de la simulation numérique sous
Matlab s'accordent avec un écart relatif moyen de 0,026625% aux
résultats de la simulation sous Abaqus et avec un écart relatif
moyen de 0,6% aux résultats d'une étude expérimentale
tirée de la littérature. Par ailleurs, il a été
établi que, pour réduire la flèche d'une structure, il
faut choisir des éléments de longueur réduite, de hauteur
supérieure ou égale à 15 mm (poutres), avec un
taux de fibres supérieur ou égal à 35% de module
d'Young longitudinal moyen supérieur ou égal à 8,5
GPa.
iv
Mots clés : Matériaux composite ;
Flèche ; Vibration mécanique ; Flexion ; Matlab ; Abaqus ;
i-VAC.
ABSTRACT
The tempting performances of the composites involve day by
day, their integration in the realization and the optimization of the
industrial works, aeronautics, car, architecture, civil engineer and sport.
Once integrated in a structure in the form of beam, plate or hull, these
composites undergo dynamic behaviors in particular transverse vibrations of
inflection. For the originator, this behavior must be predicted and guaranteed
during the design, by a good modeling of displacements of the points of the
structure. Also, with the LMP, the LAMMA and the Mechanical engineer of the
ENSET of Douala, the composites are done developed, but a true behavior in
modeling is not carried out yet in particular the vibratory aspect. It is the
reasons for which, we undertook these works relating to « the
study of the behavior of the arrow of a composite material in mechanical
vibration and simulation under Matlab ».
In front of the multidisciplinary requests, we restricted the
study with composite structures of standard folds one-way with 0° or
90° and laminated symmetrical crusader [0/90]s or antisymmetric vibrating
and requested in pure inflection. The main aim pursued during this research is
to predict the behavior of the arrow of an orthotropic structure reinforced by
vegetable local fiber. For that purpose, of the studies analytical and digital
were carried out. The analytical resolution made by means of the methods of
separations of the variables, then of Rayleigh-Ritz of the transverse equation
of motion expressed by the TCS formulated on the model of the plates of
Coils-Kirchhoff then, wide on the model of the beams of Euler-Bernoulli enabled
us to obtain the equations of behavior of the arrow of various structures with
various boundary conditions. Digital modeling was initially the subject, with
simulation under Matlab while introducing with the equations of the arrow
formulated analytically, the parameters of a composite with matrix polyester,
reinforced by fiber of Rhecktophyllum camerunense (RC), then, on the
digital simulation by finite elements under Abaqus of the same composite and
finally on the setting-up of the software i-VAC which makes it possible to
predict the behavior of the arrow of the composites studied within the
framework of this work.
The results of the digital simulation under Matlab agree with
an average variation relative of 0.026625% to the results of simulation under
Abaqus and with an average variation relative of 0.6% to the results of an
experimental study drawn from the literature. In addition, it was established
that, to reduce the arrow of a structure, it is necessary to choose elements
reduce length, higher or equal to height 15 mm (beams), with a rate of fibers
equal to or higher than 35% of average longitudinal modulus Young equal to or
higher than 8.5 GPa.
V
Keys Words : Composites materials ; Arrow ;
Mechanical vibration ; Inflexion.
vi
TABLE DES MATIERES
DEDICACE . ii
REMERCIEMENTS iii
RESUME . iv
ABSTRACT . v
TABLE DES MATIERES vi
LISTE DES FIGURES x
LISTES DES TABLEAUX xii
LISTES DES SYMBOLES ET ABREVIATIONS xiii
INTRODUCTION GENERALE 1
CHAPITRE 1 : ETAT DE L'ART SUR LE COMPORTEMENT
VIBRATOIRE D'UN
MATERIAU COMPOSITE. 3
1.1. Présentation générale des
matériaux composites 4
1.1.1. Définition générale des composites
4
1.1.2. Classification générale des fibres
développés au LMP 4
1.1.3. Choix des structures composites utilisées 4
1.2. Théorie classique des stratifiés
5
1.2.1. Hypothèses de la théorie des
stratifiés 5
1.2.2. Comportement mécanique d'une structure
stratifié. 5
1.3. Formulation de la théorie classique des
stratifiées 6
1.3.1. Hypothèses de Love-Kirchhoff 6
1.3.2. Expression du champ de déplacement
cinématiquement admissible 6
1.3.3. Expression générale du champ de
déformation 7
1.3.4. Expression du champ de contraintes 8
1.3.5. Expression des résultantes en membrane et des
moments 9
1.3.6. Equation constitutive générale d'un
stratifié en l'absence du cisaillement 10
1.4. Comportement statique des matériaux
composites orthotropes 11
1.4.1. Les différents paramètres de la flexion pure
d'une plaque orthotrope 12
1.4.2. Les différents paramètres de la flexion
cylindrique d'une structure orthotrope 13
1.5. Comportement vibratoire des matériaux
composites 14
1.5.1. Notion de la flèche 14
1.5.2. Les types de flèches 14
1.5.2.1. Analyse à partir des vibrations d'une poutre
14
1.5.2.2. Analyse à partir des vibrations des plaques
et coques 15
1.6. Méthodes de résolution et
théories des problèmes de vibration 16
1.7. Cadre de validité de la recherche
16
1.7.1. Problématique de la recherche 16
1.7.2. Couplage vibratoire 17
1.7.3. Code de calcul développé 18
1.7.4. Objectif de la recherche 18
1.7.5. La méthode mathématique utilisée dans
le cadre de la recherche 18

CHAPITRE 2 : FORMULATION THEORIQUE DE L'EQUATION DE
COMPORTEMENT DE LA FLECHE EN VIBRATION DE FLEXION D'UNE
STRUCTURE
ORTHOTROPE 20
2.1. Définition des paramètres du
problème. 21
2.1.1. Champ de déplacement cinématiquement
admissible du problème 21
2.1.2. Champ de déformation 21
2.1.3. Champ de déformation 21
2.1.4. Equation constitutive et condition d'équilibre
dynamique de la structure 21
2.1.5. Les différents problèmes de flexion à
traiter 22
2.2. Vibrations en flexion pure des poutres orthotropes
22
2.2.1. Cas d'une poutre orthotrope en appuis simples (AA) 23
2.2.2. Cas d'une poutre orthotrope encastrées sur ses deux
extrémités (EE) 25
2.2.3. Cas d'une poutre orthotrope encastrée et libre (EL)
27
2.3. Expressions explicites de la flèche d'une plaque
stratifiée orthotrope 29
2.3.1. Cas d'une plaque orthotrope en appuis simples (AAAA) 29
2.3.2. Approche par la méthode de Rayleigh 32
2.3.3. Energie de déformation 32
2.3.3.1. Energie cinétique 32
2.3.3.2. Formulation du théorème
d'énergie en théorie des stratifiées 32
2.3.4. Cas d'une plaque orthotrope à côtés
encastrés (EEEE) 33
2.3.1. Cas d'une plaque orthotrope à deux
côtés opposés encastrés et les deux autres en
appuis
simples (AEAE) 33
CHAPITRE 3 : SIMULATION NUMERIQUE SOUS MATLAB DU
COMPORTEMENT DE LA
FLECHE D'UNE STRUCTURE COMPOSITE. 35
3.1. Notion de simulation sous Matlab
36
3.1.1. Objectif de la simulation sous Matlab 36
3.1.2. Intérêt de la simulation sous Matlab 36
3.2. Présentation du composite étudié
36
3.3. Programmation des équations de la flèche
sous Matlab 36
3.3.1. Présentation des éléments et des
conditions aux limites de la simulation 37
3.3.2. Modélisation des éléments dans le cas
de l'élément poutre 37
3.3.2.1. Cas d'une poutre EE 37
3.3.2.2. Cas d'une poutre EL 46
3.3.2.3. Cas d'une poutre AA 48
3.3.2.4. Conclusion simulation des poutres 50
3.3.3. Modélisation des éléments dans le cas
d'une plaque en appuis simples 50
CHAPITRE 4 : SIMULATION NUMERIQUE SOUS ABAQUS DU
COMPORTEMENT DE LA FLECHE D'UNE STRUCTURE COMPOSITE ET VALIDATION DU CODE
DE
CALCUL 54
4.1. Présentation de la méthode des
éléments finis 55
viii
4.1.1. Principe de la méthode des éléments
finis 55
4.1.2. Différentes étapes de la méthode des
éléments finis 55
4.2. Modélisation du comportement de la
flèche d'un matériau composite en vibrations
libres
transverses 55
4.2.1. Intérêt de la modélisation
numérique 55
4.2.2. Justification du choix de ABAQUS 56
4.2.3. Présentation du composites étudiés
57
4.2.3.1. Objectif de la modélisation 57
4.2.3.2. Constituants des composites étudié
57
4.2.3.3. Eléments à modéliser 57
4.2.3.4. Les conditions aux limites à étudier
57
4.3. Modélisation par éléments
finis avec ABAQUS du comportement de la flèche d'un
matériau
composite en vibrations libres transverses
57
4.3.1. Présentation du logiciel ABAQUS 57
4.3.2. Comportement de la flèche des plaques par la
méthode des éléments finis et comparaison avec les
résultats du code développé. 59
4.3.2.1. Conditions aux limites : plaque en appuis simples
sur ses quatre côtés 59
4.3.2.2. Conditions aux limites : poutre encastrée
à une extrémité et libre sur l'autre. 62
4.4. Validation du code de calcul
64
4.4.1. Présentation des travaux de M. Assarar, A. El Mahi
& J.-M. Berthelot [13] 64
4.4.2. Mise en situation des travaux 64
4.4.2.1. Présentation du composite et description de
l'étude 64
4.4.2.2. Résultats de l'étude 65
4.4.3. Calcul des fréquences avec le code de calcul 65
4.4.4. Comparaison des deux résultats 66
CHAPITRE 5 : MISE EN PLACE D'UN LOGICIEL DE CALCUL DE LA
FLECHE D'UN
COMPOSITE ORTHOTROPE ET CAS PRATIQUE
68
5.1. Mise en place d'un logiciel de calcul de la
flèche d'un composite 69
5.1.1. Objectif de la conception du logiciel 69
5.1.2. Choix de l'outils de développement 69
5.1.3. Présentation des attributs du logiciel 69
5.1.3.1. Nom du logiciel 69
5.1.3.2. Architecture du logiciel 69
5.1.3.3. ` Fonction principale du logiciel 70
5.1.4. Petit tutoriel de i-VAC 71
5.2. Cas pratique : optimisation du support d'un
panneau de signalisation 73
5.2.1. Mise en situation 73
5.2.2. Problématique de l'optimisation 73
5.2.3. Objectif de l'optimisation 74
5.2.4. Etude vibratoire du système 74
5.2.4.1. Hypothèses de l'étude et
données 74
5.2.4.2. Bilan des actions mécaniques exercées
sur le système 74
5.2.4.3. Champ de déplacement cinématiquement
admissible du système 75
5.2.4.4. Expression du moment fléchissant 75
5.2.4.5. Flèche maximale du système 75
5.2.4.6. Présentation et comparaison avec la
flèche maximale 76
ix
CONCLUSION GENERALE : BILAN ET PERSPECTIVES
77
ANNEXES 78
Annexes 1 : Coefficients intervenants dans le calcul des
fréquences propres 78
Annexes 2 : Caractéristiques des fibres
intégrées dans le logiciel i-VAC 78
Annexes 3 : Les caractéristiques des matrices
intégrées dans le logiciel i-VAC 79
Annexes 4 : Classe des moments de flexion
normalisées 79
BIBLIOGRAPHIE 86
X
LISTE DES FIGURES
Titres pages
Figure 1.1 : (a) Diagramme de définition d'un
composite ; (b) Différentes constituant d'un composite. 4
Figure 1.2 : Classification des fibres
végétales développées au LMP [1]. 4
Figure 1.3 : Schématisation d'une plaque selon
Love-Kirchhoff [2] 6
Figure 1.4 : Bilan des actions mécaniques
appliquées à un élément de la plaque 9
Figure 1.5 : Schéma d'un stratifié à
n couches 10
Figure 1.6 : Cchémas d'une plaque pour flexion
cylindrique. 12
Figure 1.7 : Schémas d'une plaque pour flexion
cylindrique. 13
Figure 1.8 : Images de quelques structures soumises aux
vibrations [8-9-10] 17
Figure 2.9 : Schéma d'une poutre en appuis simples
sur ses deux extrémités 23
Figure 2.10 : Schéma d'une poutre encastrée
sur ses deux extrémités 25
Figure 2.11 : Schéma d'une poutre en appuis simples
sur ses deux extrémités 27
Figure 2.12 : Plaque rectangulaire en appuis simples sur
ses 4 côtés (AAAA) 29
Figure 2.13 : Plaque rectangulaire encastrée sur
ses 4 côtés (EEEE) 33
Figure 2.14 : Plaque encastrée sur 2
côtés consécutifs et en appui simple sur les 2 autres
(AEAE). 33
Figure 3.15 : Graphe de variation de la flèche
maximale pour les 6 premiers modes 37
Figure 3.16 : Graphe de variation de la flèche
maximale en fonction des modes 38
Figure 3.17 : Influence de la longueur de la poutre sur le
comportement de la flèche 39
Figure 3.18 : Comportement de la flèche sur une
poutre EE de longueur 500 mm 39
Figure 3.19 : Influence de la longueur de la poutre EE sur
les fréquences angulaires propres 40
Figure 3.20 : Influence de la hauteur de la poutre (EE)
sur le comportement de la flèche. 40
Figure 3.21 : Influence de la hauteur de la poutre (EE)
sur les caractéristiques vibratoires. 41
Figure 3.22 : Influence de la hauteur de la poutre (EE)
sur les fréquences angulaires 41
Figure 3.23 : Influence du type de section d'une poutre
(EE) sur les fréquences angulaires. 43
Figure 3.24 : Influence du taux de fibres sur le
comportement de la flèche d'une poutre (EE) 43
Figure 3.25 : Influence du taux de fibres sur les
fréquences angulaires dans une poutre (EE) 44
Figure 3.26 : Influence du module d'Young des fibres sur
le comportement de la flèche de la poutre (EE). 45
Figure 3.27 : Influence du taux de fibres sur les
fréquences angulaires dans une poutre (EE) 45
Figure 3.28 : Comportement de la flèche pour les 6
premiers modes d'une poutre EL 46
Figure 3.29 : Graphe de variation de la flèche
maximale en fonction des modes 46
Figure 3.30 : Influence du taux de fibres sur le
comportement de la flèche d'une poutre (EL). 47
Figure 3.31 : Influence un taux de fibres > 35% de la
poutre (EL) sur les caractéristiques vibratoires. 48
Figure 3.32 : Influence un taux de fibres < 35% de la
poutre (EL) sur les caractéristiques vibratoires. 48
Figure 3.33 : Comportement de la flèche pour les 8
premiers modes d'une poutre AA 48
xi
Figure 3.34 : Comportement de la flèche en fonction
de la longueur d'une poutre AA 49
Figure 3.35 : Comportement de la flèche en fonction
de la hauteur d'une poutre AA 49
Figure 3.36 : Comportement de la flèche en fonction
du taux de fibre dans la poutre AA 50
Figure 3.37 : Comportement de la flèche d'une
plaque AAAA (pli à 0°) pour 5 modes. 51
Figure 3.38 : Comportement de la flèche d'une
plaque AAAA (pli à 0°) pour 5 modes. 52
Figure 3.39 : Comportement de la flèche d'une
plaque AAAA (pli à 90°) pour 5 modes. 52
Figure 3.40 : Comportement de la flèche d'une
plaque AAAA (SS à [0/90]s) pour 5 modes. 53
Figure 3.41 : Comportement de la flèche d'une
plaque AAAA (stratifié antisymétrique à
[0/90]s). 53
Figure 4.42: Présentation graphique du comportement
de la flèche sur un pli orthotrope 59
Figure 4.43 : Ecart relatif entre la flèche
maximale calculée par MATLAB et celle calculée par ABAQUS
60
Figure 4.44 : Influence du nombre d'éléments
sur le comportement de la flèche d'une plaque en appuis simples.
61
Figure 4.45 : Comportement de la flèche sur une
plaque en appuis simples sur ses 4 extrémités. 62
Figure 4.46 : Présentation graphique du
comportement de la flèche sur une poutre EL 62
Figure 4.47 : Comportement de la flèche sur un pli
orthotrope en appuis simples sur ses 4 extrémités. 63
Figure 4.48 : Présentation graphique du
comportement de la flèche sur une poutre EL 64
Figure 4.49 : Stratifié croisé
symétrique considéré pour l'étude 65
Figure 4.50: Dispositif expérimental utilisé
[13]. 65
Figure 4.51: Dispositif expérimental
utilisé. 66
Figure 4.52 : Différentes étapes à
suivre pour analyser le comportement de la flèche 70
Figure 4.53 : Aperçu de l'écran de
démarrage et d'accueil du logiciel i-VAC. 71
Figure 4.54 : Aperçu de l'interface de l'ongle
MATERIAU du logiciel i-VAC 71
Figure 4.55 : Aperçu de de l'interface de l'ongle
HOMOGENEISATION du logiciel i-VAC 72
Figure 4.56 : Aperçu de de l'interface de l'ongle
CARACTERISTIQUES du logiciel i-VAC 72
Figure 4.57 : Aperçu de de l'interface de l'ongle
RESULTATS du logiciel i-VAC. 72
Figure 4.58 : Images de différents panneaux de
signalisation. [23] 73
Figure 5.59 : Schéma annoté d'un panneau de
signalisation routière 73
Figure 5.60 : Schéma annoté d'un panneau de
signalisation routière 75
xii
LISTES DES TABLEAUX
Titres pages
Tableau 3.1 : Tableau des caractéristiques des
constituants 36
Tableau 3.2 : Présentation des différentes
conditions aux limites 37
Tableau 3.3 : Valeurs des flèches maximales pour les
10 premiers modes d'une poutre EE 38
Tableau 3.4 : Flèches maximales avec
différentes longueurs pour 5 modes d'une poutre EE. 38
Tableau 3.5 : Fréquences angulaires maximales avec
différentes longueurs pour 5 modes d'une poutre EE. . 39
Tableau 3.6 : Flèches maximales pour
différentes hauteurs des 5 premiers modes d'une poutre EE. 40
Tableau 3.7 : Fréquences maximales pour
différentes hauteurs des 5 premiers modes d'une poutre EE 41
Tableau 3.8 : Flèches maximales pour
différentes sections d'une poutre EE pour les 5 premiers modes.
42
Tableau 3.9 : Fréquences maximales pour
différentes section d'une poutre EE pour les 5 premiers modes.
42
Tableau 3.10 : Flèches maximales pour
différents taux de fibres d'une poutre EE pour les 5 premiers modes
43
Tableau 3.11 : Fréquences maximales pour
différents taux de fibres d'une poutre EE pour les 5 premiers modes.
44
Tableau 3.12 : Flèches maximales pour
différents Ef d'une poutre EE pour les 5 premiers modes 44
Tableau 3.13 : Fréquences maximales pour
différents Ef d'une poutre EE pour les 5 premiers modes. 45
Tableau 3.14 : Valeurs des flèches maximales pour les
10 premiers modes d'une poutre EL 46
Tableau 3.15 : Flèches maximales pour
différents taux de fibres d'une poutre EL pour les 5 premiers modes
47
Tableau 3.16 : Flèches maximales avec
différentes longueurs pour les 5 premiers modes d'une poutre AA.
49
Tableau 3.17: Flèches maximales avec
différentes longueurs pour les 5 premiers modes d'une poutre AA.
49
Tableau 3.18: Flèches maximales avec
différentes longueurs pour les 5 premiers modes d'une poutre EE.
50
Tableau 3.19 : Valeurs des flèches maximales pour les
5 premiers modes d'une plaque AAAA 51
Tableau 4.20 : Présentation géométrique
des éléments à modéliser 57
Tableau 4.21 : Comparaison des résultats obtenus par
ABAQUS avec ceux du code développé. 59
Tableau 4.22 : Comportement de la flèche d'une plaque
AAAA en fonction du nombre d'éléments. 60
Tableau 4.23 : Comparaison des résultats obtenus par
ABAQUS avec ceux du code développé. 63
Tableau 4.24: Fréquences calculées par les
travaux expérimentaux de M. Assarar. 65
Tableau 4.25: Résultats des fréquences
calculées par le code développé 66
Tableau 4.26 : Comparaison des fréquences
calculées par Matlab avec celles obtenues par M. Assarar. 66
Tableau A1.27: Coefficients intervenants dans le calcul des
fréquences propres d'un composite orthotrope (E :
côté encastré ; S : côté en
appui simple). [3] 78
Tableau A2.28 : caractéristiques mécaniques et
masse volumique de quelques fibres [13] 78
Tableau A2.29 : Caractéristiques mécaniques de
quelques fibres végétales extraites au Département
Génie
Mécanique de l'ENSET de Douala. 78
Tableau A3.30 : Caractéristiques des matrices.
79
Tableau A4.31 : caractéristiques
géométriques des supports types : SP (a) ; SD1 (b) et SD2 (c)
[23] 79
Tableau A4.32 : caractéristiques
géométriques des supports type SD3 79
Tableau A6.33 : les différentes classes des moments de
flexion normalisées [23] 80
xiii
LISTES DES SYMBOLES ET ABREVIATIONS
Liste des symboles
|
Symboles
|
Désignations
|
Unités
|
|
Dimension de la structure suivant x
|
[mm]
|
|
Dimension de la structure suivant y
|
[mm]
|
|
Hauteur ou épaisseur de la structure suivant z
|
[mm]
|
|
Coefficients de la matrice de rigidité
|
[MPa]
|
|
Coefficient de la matrice de rigidité
réduite
|
[MPa]
|
|
Coefficient de la matrice de rigidité
membranaire
|
[N/mm]
|
|
Coefficient de la matrice de rigidité en couplage
membrane-flexion- torsion
|
[N]
|
|
Coefficient de la matrice de rigidité en
flexion
|
[N.mm]
|
|
Module d'Young ( , L : Longitudinal ; T :
Transversal)
|
[MPa]
|
|
Coefficient de Poisson
|
|
|
Module de cisaillement transverse
|
[MPa]
|
|
Tenseur de déformation
|
|
|
Tenseur de déformation membranaire
|
|
|
Tenseur de déformation en flexion
|
|
|
Tenseur des courbures
|
|
|
Tenseur des efforts membranaires
|
[N]
|
|
Tenseur des moments de flexion et torsion
|
[N/mm]
|
|
Tenseur des contraintes
|
[MPa]
|
|
Force par unité de volume
|
[N/mm^3]
|
|
Force par unité de surface
|
[N/mm^2]
|
|
; ;
|
Coefficient des fonctions de déplacement
|
|
|
Fréquence angulaire des vibrations
|
[rad/s]
|
|
Déformée modale
|
|
|
;
|
Mode d'excitation suivant x et y
|
|
|
Energie cinétique
|
[J]
|
|
Energie de déformation
|
[J]
|
|
Ecart relatif
|
|
|
|
|
Liste des abréviations
TCS : Théorie
Classique des Stratifiés ;
CAO : Conception
Assistée par Ordinateur ;
ENSET : Ecole
Normale Supérieure
d'Enseignement Technique ;
MATLAB : Matrix
LABoratory ;
LAMMA : Laboratoire de
Mécanique et des Matériaux
Appliqués ;
LMP : Laboratoire de
Mécanique et Productique.
1
INTRODUCTION GENERALE
Depuis des années, le développement des
nouvelles technologies met un accent particulier sur l'emploi des
matériaux présentant un caractère biodégradable, de
faible masse avec des caractéristiques mécaniques et thermiques
répondants aux besoins de l'application. Toutefois, des études
d'analyses des comportements en particulier l'aspect vibratoire doivent
être faites par le concepteur afin de préserver les structures et
les édicter contre la fatigue et la rupture. L'une des causes de rupture
est la fatigue structurale due aux ondes vibratoires et l'ampleur de la
flèche en vibration suite à une excitation.
L'étude ou l'analyse des vibrations n'est pas une
science récente et pourtant elle connait depuis quelques années
un regain d'intérêt pour des besoins de conception et de
dimensionnement des structures répondant aux meilleures conditions de
fonctionnement, de sécurité, d'économie,
d'esthétique et d'isolation acoustique. Face à ces exigences, les
matériaux composites obtenus par association de deux phases distinctes,
sont une solution idéale grâce à leur
multifonctionnalité intégrée. Ils se font exploités
largement dans de nombreux secteurs industriels tels que l'aéronautique,
l'aérospatial, la construction navale, la construction automobile,
l'électroménager, le génie civil, l'acoustique, le textile
et bien d'autres. Dans le domaine textile par exemple : des fibres de toutes
natures consistent à former des fils par assemblage pour la confection
des vêtements de protection contre le froid : à savoir les fibres
d'origine animale (laine de mouton, de lapin, ...) ou végétale
(lin, coton), les polymères biodégradables synthétiques
obtenus à partir de l'amidon de maïs, sans oublier les
céramiques et les carbones. Pour obtenir des textiles
synthétiques, aussi bien pour les vêtements que pour les tissus de
décoration ou d'usage intérieur (rideaux, matelas, serviettes,
tapisseries...).
Aujourd'hui, le développement des matériaux
composites constitue un axe de recherche particulier au sein du laboratoire de
Mécanique et productique de l'Université de Douala. Seulement,
l'intégration dans les lois de comportement constituent encore une
épine pour les chercheurs du laboratoire. L'ensemble des études
menées dans d'autres laboratoires ont prouvées que les
matériaux composites réagissent mieux que les matériaux
homogènes au comportement vibratoire d'autant plus que, ces
études ne mettent pas en exergue le comportement de la flèche,
d'où la question, comment se comporte la flèche d'un
matériau composite soumis à des vibrations transversales ? La
réponse à cette question, constitue l'axe principal de cette
recherche portant sur la thématique intitulée :
« Etude du comportement de la flèche d'un matériau
composite en vibration et simulation sous Matlab ». Cette
recherche, vient renforcer la volonté de cerner, de maîtriser la
conception et l'optimisation des structures en matériaux composites
renforcés par des fibres développées au sein du LMP, LAMMA
et Génie Mécanique de l'ENSET de l'Université de Douala
afin que ceux-ci s'intègrent et répondent mieux aux exigences de
conception.
Ce mémoire, qui constitue le résumé des
travaux de recherches menés, s'articulent sur cinq chapitres.
2
Le chapitre 1, fait état de l'art sur le comportement
vibratoire d'un matériau composite. Nous présentons de
façon générale les matériaux composites à
travers leur définition et classification générale des
fibres développées au L2M&P. Nous rappelons la théorie
classique des stratifiés sur le modèle de Love-Kirchhoff, puis
simplifiée par l'hypothèse de Euler-Bernoulli. Nous
présentons aussi les différents paramètres de la
flèche. Une analyse bibliographique dans les études de vibrations
transversales est faite pour relever les travaux manquants, puis un bilan de ce
chapitre est effectué pour définir le cadre de validité de
notre étude.
Au chapitre 2, nous formulons l'équation de mouvement
à partir de la Théorie Classique des Stratifiés en
vibration transverse pour la flexion d'une plaque de Love-Kirchhoff puis
transposée sur les poutres de Euler-Bernoulli. L'équation
différentielle obtenue est résolue par la combinaison de la
méthode de séparation des variables et la méthode de
Rayleigh-Ritz. Cette résolution conduit à l'équation de
comportement de la flèche d'un matériau composite orthotrope
sollicité en flexion pure.
Au chapitre 3, nous effectuons une simulation numérique
sous Matlab du comportement d'une poutre unidirectionnelle, puis d'une plaque
unidirectionnelle et d'une plaque orthotrope à matrice polyester,
renforcé par des fibres de RC pour définir les
caractéristiques minimales d'une poutre sollicitée en flexion
pure, soumise à des vibrations transverses afin de minimiser sa
flèche.
Au chapitre 4, nous effectuons d'abord une simulation sous
Abaqus du comportement de la flèche d'une plaque, puis d'une poutre en
composite polyester/RC ensuite, ces résultats sont confrontés
à ceux générés par le code de calcul
développé au chapitre 3 et enfin, la véracité des
résultats du code de calcul est établie en confrontant ceux-ci
aux résultats obtenus au cours d'une expérimentation tirée
de la littérature.
Au chapitre 5, nous mettons sur pieds une micro-application
sous Matlab destinée à la communauté des chercheurs
scientifiques et aux bureaux d'études afin de raccourcir les
études de vibration en flexion des structures en plis unidirectionnels
ou orthotropes, en stratifié croisé symétrique et
antisymétrique. La poutre du panneau de signalisation est
étudiée comme application visant à montrer que le
matériau homogène peut être substitué par un
composite.
3
CHAPITRE 1 : ETAT DE L'ART SUR LE COMPORTEMENT VIBRATOIRE
D'UN MATERIAU COMPOSITE.
Chapitre 1 :
ETAT DE L'ART SUR LE COMPORTEMENT VIBRATOIRE
D'UN
MATERIAU COMPOSITE.
Depuis les années 1980, l'utilisation des
matériaux composites dans le secteur de l'automobile,
aéronautique, navale, génie civil et architecture s'est fortement
accélérée. Les avantages de légèreté,
ténacité, dureté, longue durée de vie, haute
résistance mécanique, thermique, chimique et électrique ;
etc. sont des valeurs que les composites offrent et poussent les concepteurs
à élaborer et à optimiser les performances des structures
réalisées avec des matériaux classiques (acier, aluminium,
cuivre, etc.). De plus, les composites offrent une flexibilité de formes
et permettent d'aboutir à des conceptions particulières et
spécifiques. Seulement, une fois intégrés dans une
structure comme poutre, plaque ou coque, les composites sont souvent
confrontés aux problèmes de vibrations. Dans ce chapitre, il est
question de présenter d'abord la notion de composite, ensuite rappeler
la théorie classique des stratifiés en statique, puis
dégager les différents paramètres de la flèche en
vibration et enfin définir le cadre de validité de cette
recherche.
1.1. Présentation générale des
matériaux composites
1.1.1. Définition générale des
composites
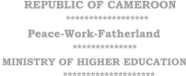
Un matériau composite ou composite, est
généralement l'union d'au moins deux phases (matrice/renfort) non
miscibles, de nature différente, se complétant, dont l'ensemble
des performances est supérieur à celui d'un constituant (figure
1.1). Les composites sont très hétérogènes et
très anisotrope1 de plus, ils disposent d'atouts majeurs
défiant les matériaux homogènes comme :
légèreté, résistance mécanique, chimique,
thermique et électrique.
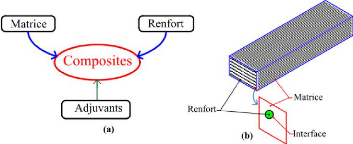
Figure 1.1 : (a) Diagramme de
définition d'un composite ; (b) Différentes constituant
d'un
composite.
1.1.2. Classification générale des fibres
développés au LMP
Il existe une foultitude de composites, qui se distinguent et
se caractérisent par leurs constituants. Les composites
développés au LMP se trouvent dans la classe des composites
à fibres végétales. Ces fibres végétales
peuvent être classées suivant leur origine comme le montre la
figure 1.2. [1J

Figure 1.2 : Classification des
fibres végétales développées au LMP
[1].
1.1.3. Choix des structures composites utilisées
Le diamètre des fibres d'un composite étant
microscopique, les pièces composites sont généralement
réalisées à partir d'éléments
structurels2« prêt à mettre en forme »
contenant un grand nombre de fibres, comme des fils à tisser ou des
nappes. Parmi ces structures seules les plis et les stratifiés feront
l'objet de notre étude car la fabrication de stratifiés offre la
possibilité d'adapter le comportement du matériau aux conditions
de chargement attendues.
1 Anisotrope : variation des propriétés
mécaniques suivant la direction.
2 Les éléments structurels ici sont les
plis, les stratifiés et les sandwiches.
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
1.2. Théorie classique des stratifiés
La théorie classique des stratifiées permet
d'estimer, à partir des chargements macroscopiques appliqués, les
champs de contraintes et de déformations à l'échelle du
pli.
1.2.1. Hypothèses de la théorie des
stratifiés
A l'échelle microscopique, dans le cadre de la
théorie classique des stratifiés, les plis unidirectionnels sont
supposés :
? Parfaitement liés les uns aux autres,
c'est-à-dire que, entre eux il n'existe pas de glissement, ou
décollement ;
? Avoir un comportement mécanique
caractérisé par les déplacements
??0(x, y, z, t),
v0(x, y, z, t) et
??0(x, y, z, t) des points du plan moyen
du pli ;
? Présenter un comportement élastique isotrope
transverse ;
? Travailler en contraintes planes ;
1.2.2. Comportement mécanique d'une structure
stratifié.
Compte tenu de ses hypothèses, le comportement
mécanique est ainsi caractérisé à l'échelle
du
pli par ses propriétés élastiques , , et .
Pour un état de contraintes planes, la loi de Hooke
généralisée pour une couche k est traduite
par :
'?xx? ?Q:1 Q12
Q16???xx?
? ? ? ? S S S ? ? ? ?
xx 11 12 16 xx
? ? ? ? ? ?
? ? S S S
? ? ? ?
yy 12 22 26 ? ? ?
yy
16 26 36 (1.2)
Q 66 ?
|
' ' '
? ?? ?
? Q Q Q ?
yy 12 26 ? ? yy ?
22
' ' '
? ? ?
? ? ? ?
? ? ? ? Q Q Q
xy 16 26 ? ? ? ?
?xy
k 66 k
k
Q ?
|
? ? ? ? ? ?
? S S S ? ? ? ? ? ?
?
xy 16 26 66
k k xy k
Ou
|
(1.1)
|
Ca3C/33
Où Qae = Cap C
représente les constantes de la matrice de rigidité
réduite d'une couche k.
33
11 1
LT LT
LT LT
- Sur les axes principaux, les
composantes de la matrice de rigidité sont :
; ; ; ; ; ; ;
?? ? 1 ?
? ?
Q et S étant des tenseurs inverses, il vient pour une
structure orthotrope :
?LTEL
Q12 ?
;
; (1.3)
EL
; Q22 ?
EL
1
?
VLTVLT
5
- En dehors des axes principaux :
Pour un composite unidirectionnel ou orthotrope, les
constantes de rigidité en dehors de ses axes principaux sont
exprimées par :
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
(1.4)
Q = C4Q11 +
S4Q22 + 2C2S2
11
Q2'2= S4Q11 +
C4Q22 + 2S2C2
Q
_C2S2 66 - Q12
=Q12(C4+S4)+(Q11+Q22-4Q66)C2S2
Q;6=C3S(
-Q11+Q12+
2Q66)+S3C(Q22-Q21-2Q66)
Q26 = S3C( -Q11 +
Q12 + 2Q66)+
C3S(Q22 -Q21 -2Q66)
(Q12 +2Q66)
(Q12 +2Q66)
( Q 11+Q 22-2Q 12
-2Q 66)+ Q 6 6 (C 4
+S4)
Où : etS=Sin8
1.3. Formulation de la théorie classique des
stratifiées
La théorie classique des stratifié nous permet
d'établir les équations de mouvement d'une structure
stratifié en se basant sur le modèle de Love-Kirchhoff ou de
Mindlin. Mindlin dans sa théorie prend en compte le cisaillement
transverse en supposant qu'une section effectue une rotation par rapport au
plan moyen de la plaque tandis que Love-Kirchhoff rejoignent le modèle
des plaques de Euler-Bernoulli qui ne tienne pas compte du cisaillement
transverse. Ce dernier modèle sera retenu pour la suite de notre
travail.
1.3.1. Hypothèses de Love-Kirchhoff
Le modèle de Love-Kirchhoff considère que
[2] :
- La plaque est mince et L/h > 20 ;
- Les déformations et les
déplacements restent petits (Hypothèse des petites perturbations)
; - Les interfaces entre les plis sont parfaites· ;
- Au cours de la déformation, les
segments restent perpendiculaires à la surface moyenne, ce
qui permet de négliger l'effet du cisaillement transverse
.
6
Figure 1.3 : Schématisation
d'une plaque selon Love-Kirchhoff [2] 1.3.2. Expression du champ
de déplacement cinématiquement admissible
Le champ général de déplacement en un
point M d'une plaque de Love-Kirchhoff à l'instant t, s'exprime par :
7
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
v w w 0
ÇO y
2 ? ö ö ) ? ö )
z y 2 y
(1.5)
Où : et sont des déplacements membranaires dans les
directions L et T ; et sont des
rotations dues à la flexion ; est la flèche de la
plaque.
1.3.3. Expression générale du champ de
déformation Le champ de déformation s'exprime par :
e yz = I + 1 = I + I
? ? ?
? ?
x y
a w
- ? -
? 9
y x
a y


(1.7)
(1.8)
(1.9)
(1.10)
(1.11)
Dans les conditions de Bernoulli-Euler qui ne tiennent pas
compte du cisaillement transverse,
nous avons : . (1.12)
En reportant (1.12) dans (1.11) et
(1.10), nous avons :
|
?w
0
?x
|
0
(1.13)
|
|
En tenant compte de (1.13), (1.5), devient :
? w
u x y t u x y t z x 0
( , , ) ( , , )
? -- S
= 0 S
w
? ? ? v x y t v x y t z y 0
( , , ) = ( , , ) -- S S
0
?
? w ( x , y
, t ) = w 0 ( x
, y , t )
?
?
En un point ??, le tenseur de déformation se traduit par
l'expression : ? ? ? 0 ? ? ?
?
xx xy xx
? ? ?
? ? ?
? ? ? 0
xy yy ? ? ? ?
? yy
? ? 0 0 0???? ?
?
? xy
En tenant compte de (1.19), le tenseur de déformation peut
se décomposer par :
|
(1.14)
(1.15)
|
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
(1.16)
Il en ressort deux tenseurs des déformations
représentant chacun :
n Le tenseur des déformations en membrane
:
(1.17)
?? ?
u0
? ?
?
? ? ? ? ?
xx v
0 0
?m ? ?yy ?

?0??
?
0??v
y
u
0
?? ? ? ?
0 x
n Le tenseur des déformations en flexion et
torsion :
yy
?f
??
(1.18)
? ? ? ?
y x ?? ? 2w0 ? ? z?x2
kxx ?z?k? ????z?2w0
?y2 k ?????xy 2z ?2w0
?x?y
8
En posant 6 f = zk , nous avons la matrice
des courbures k . (1.19)
Finalement, le tenseur des déformations s'écrit
:
(1.20)
1.3.4. Expression du champ de contraintes
En considérant (2.11), pour un pli k de
normale ?? soumis à un état de contraintes planes, la
loi de Hooke sur les axes du matériau s'écrit :
''
? ? ?
? Q Q Q
' ? ? ?
?
' ' (1.23)
|
16
11 12 xx
? ? ?
xx ? ? ?
' ' '
? ? ? ?
? Q Q Q ?
yy 12 26 ? ? yy ?
22
? ? ? ' ' '
? ? ? ?
? ? ? ?
Q Q Q
xy 16 26 ? ? ? ?
?xy
k k
66 k
? ? Q ?m ? zQ
k
En tenant compte de (2.23), (2.24) devient :
' ' ' '
? ? ?
? Q Q Q ? ? ? ?
?0 Q Q Q k
' ' ? ? ?
xx 16 16
11 12 11 12 xx
? ? ? ?
xx
? ? ? ? ? ?
' ' '
? ? ? ? 0 ' ' '
? ? Q Q Q z Q Q Q k
12 26 ? ? ? ? ?
yy yy 12 26 ? ? ?
yy
22 22
? ? ? ? ?
? ? ? ' ' ' 0 ' ' ' ? ?
? ?
?xy 16 26 16 26
? ? ? ? ? ?
xy xy
? ? Q Q Q ? Q Q Q k
? ? ? ?
k 66 k k k
66 k
|
(1.21)
(1.22)
|
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
1.3.5. Expression des résultantes en membrane et des
moments
Les différentes résultantes permettent
d'établir l'équation constitutive d'un stratifié.
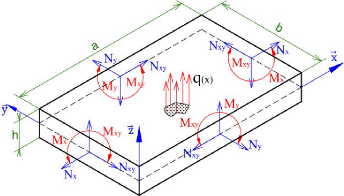
Figure 1.4 : Bilan des actions
mécaniques appliquées à un élément de la
plaque. > Les résultantes en membrane :
? ?
N ? ?
?
xx xx
n h /2 ? ?
N ? ? N ? ?
yy yy
?? ? dz
? ? h /2 ? ?
?
k ? 1
? ?
N ? ?
?
(1.24)
xy ? ?
? ? xy
(1.25)
k
0
? A A A ?
11 12 16 ? ? ? ? B B B ? ?
k ?
xx 11 12 16 xx
En associant (1.23) à (1.24), puis en intégrant, il
vient :
0
N ? ? A A A ? ?
? ? ? ? ?
? B B B k
12 22 26 ? ? ? ?
?
? yy 12 22 26 ? ? ?

yy
0
? ?A A A
16 26 66? ? ? ? ? ? ? ?
? B B B k
xy 16 26 66 ? ? ? ? ? ?
xy
9
D'où : (1.26)
? ? h/2 ? ?
> Les moments de flexion et de torsion
:
? ?
M ? ?
?
xx xx
|
M? M?
yy yy
? z ? dz
? ? ? ?
?h/2
? ?
M ? ?
xy ? ?
?
? ? xy k
En reportant (1.23) à (1.27), puis en intégrant,
il vient :
B11 B12 B16 1??xx0
D11 D12 D16 1?k 1
M ??B12 B22 B26
?ÿy ? D12 D22
D26 kyy
B16 B26 B66
?????xy0 ? D16 D26 D66
????kxy ?
|
(1.27)
(1.28)
|
D'où : M = BEm + Dk (1.29)
Nous considérons que le stratifié est
constitué de n couches, configuré comme le montre la figure
1.3.
10
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
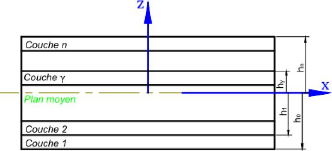
Figure 1.5 : Schéma d'un
stratifié à n couches
k=1 ?
Avec :
- : Représentent les coefficients de
rigidité en membrane d'expression :
(1.30)
- : Représentent les coefficients de
couplage membrane-flexion-torsion d'expression :
(1.31)
- : Représentent les coefficients de
rigidité en flexion d'expression :
|
n2 hk
D?? ? (Q l ao
/k[hkzk
? 12
|
a,f =1,3,6 (1.31)
|
Avec : sont les coefficients de rigidité réduit, et
sont respectivement la côte et
l'épaisseur de la couche ?? de n couches
mesurée à partir du plan moyen.
1.3.6. Equation constitutive générale d'un
stratifié en l'absence du cisaillement
Elle permet de lier les résultantes et les moments en
fonction des différentes déformations. Pour cela, il suffit
d'assembler (1.25) et (1.28) :
|
N 1 ?A11 A12 A16
B11 B12 B16 1 £
0
xx ?
? ? ? ? ?
0
? ? ?
N A A A B B B £
yy 12 22 26 12 22 26 ?
yy
? ? ?
? ? ?0
Nxy ? A16 A26 A66
B16 B26 B66 £xy
M?B11 B12 B16
D11 D12 D16 kxx ? ??
Myy? ?B12 B22 B26 D12
D22 D16 kyy
? ? ? ? ?
?M y J B16 B26
B66 D16 D16 D66 ????kxy J
|
(1.32)
|
Du point de vue de l'équation constitutive, un composite
est orthotrope si :
· Il n'existe aucun couplage membrane-flexion-torsion :
[B ] = [ 0] ;
· Il n'existe pas de couplage traction-cisaillement et
flexion-torsion : A16 = A26 = 0 et
D16=D16=0; (1.33)
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
|
Donc pour un stratifié orthotrope, l'équation
constitutive est :
0
? ? ?
N A A 0 0 0 0 ? ?
? ? ? 0
N 0 0 A 0 0 0 ? ?
xy 66 xy
? ? ?
? ? ?
? ? ?
M 0 0 0 0 ? ? ?
xx 11 12 ? ? ?
xx
? ? ?
M 0 0 0 D D 0
12 22 ? ? ?
k
? ? ?
yy yy
?
??
xy
Q 66h
D ? 66 12
xx 11 12 ? ? ?
? xx
? ? ? ?0
N A A 0 0 0 0 ?
? ? ?
yy 12 22 ? ? ?
? ?
yy
Cette équation est valable pour [3] :
n Les plis unidirectionnels 0° et 90° de
caractéristiques :
|
(1.34)
|
|
D D k
Pour ; (1.35)
? ? ?
M ? 0 0 0 0 0 D k
66 ? ? ?
xy ? ? ?
Pour ; (1.36)
n Les stratifiés symétriques à couches
orthotropes dont les axes principaux coïncident avec les axes de
références du stratifié : c'est le cas des
stratifiés symétriques et antisymétriques. Les
coefficients de rigidités de flexion s'expriment :
- Pour un stratifié croisé
symétrique à n couches impaires :
1 R (n-3)[R
(n-1)+2(n+1)1
e e
a = +
( )
1+ Re
; ;
r Q 3
D22 =[(1-RQ)a +
RQ1 r22h;
12
3
; (1.37)

3 (n2 -1)(1+Re )3 ;
- Pour un stratifié croisé à n
couches impaires :
3
D11= [(RQ-1)Q+1-1 12 ;
D ? Q12h3
;
12 12
11
D22 = [(1-- RQ) fi +
RQ '66 = ; Q22h3 D
Q66h3 RR Q = ET
(1.38)
12 12E.
fi
; Re e0?
e90?
= 1 + 8Re(n-1) 1+R
n2(1+R )3
Les études menées dans le cadre de cette
recherche prendront uniquement en compte ce type de structures.
1.4. Comportement statique des matériaux
composites orthotropes
Cette étude nous permettra de définir les
différents paramètres de la flèche d'une structure
orthotrope sollicitée en flexion.
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
1.4.1. Les différents paramètres de la
flexion pure d'une plaque orthotrope
Considérons une structure composite orthotrope soumise
à un chargement transverse q (x, y) et configuré comme
le montre la figure ci-dessous.
??divN ?
? 2 2 2
u ? u ?
v
0 0 0
A ? A 2 ( 12
? A ? A 66 ) ?
0
11 2 66
? x ? y ? x
? y
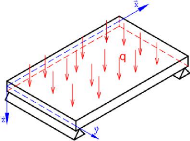
Figure 1.6 : Schémas d'une
plaque pour flexion cylindrique.
Le comportement statique d'une telle structure est
caractérisée par l'équation d'équilibre :
(1.39)
a 2 2 2
u a v a v
0 0 0
( 12
A + A 66 ) + A A
= 0
66 2 22 2
a x a y a x a y
e 4 4 4
w e w e w
0 0 0
D + 2( 2 ) 2
2
11 4 12 + =
66 22 4
e x e x e y e y
En l'absence des forces de volumes , il vient :
? divM ???
D D + D q
En développant l'équation constitutive, puis en
reportant le résultat dans (a), il vient en l'absence des charges
axiales :
? ?
w ( x , y
) = ?? C k
k=1 l=1
(1.40)
(1.41)
x y
qkl ? 0
(1.42)
En flexion pure, l'équation d'équilibre est
réduite à l'équation (1.42), donc la solution
recherchée
pour une plaque en appuis simples est de la forme :
16 q 0
kl kl? 2
(1.43)
qkl
?
Avec :
Ckl
?
2
(1.44)
4 2 2 4
? ?
k
? ? ? 2 ? ?
11 12 ? ? ? ? ? ? ? ?
? ? ? ? ? ?
k l l
D D 2 D D
66 22
? ?
a ? ? ? ? ? ?
a b a
12
|
q?
Et :
|
, si et sont impairs ; (1.45)
|
, si et sont pairs.
Le comportement de la flèche en un point M (x, y)
de la plaque s'écrit :
13
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
(1.46)
Avec : (1.47)
a 2 2 3
U a V a W
0 0 0
A ? A ? B -
0
Et : (1.48)
11 2 16 2 12 3
a x ax ax
1.4.2. Les différents paramètres de la
flexion cylindrique d'une structure orthotrope
En flexion cylindrique, la déformation de la plaque est
considérée comme indépendante de la coordonnée
suivant la longueur de la plaque.
Configuration de la plaque en flexion
cylindrique
Considérons une plaque stratifiée à n
couches très longue suivant y, soumise à une charge
transversale ??, configurée comme le montre la figure ci-dessous.
a 2 2 3
u a v a w
0 0 0
A ? A ? B =
0
16 2 66 2 16 3
a x a x ax
a 4 3 3
w a u a v
0 0 0
D -- B -- B =
q
11 4 11 3 16 3
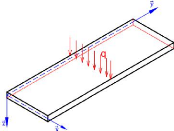
Figure 1.7 : Schémas d'une
plaque pour flexion cylindrique. Les équations d'équilibres
en l'absence des charges axiales sont dans cas :
a x a x a x
0( ) m cos
w 0( x )
0( ) m cos
|
u x A
? m ?
0( ) m cos
v x B
? m ?
|
(1.49)
(1.50)
|
x
(1.51)
Pour une poutre en appuis simples, les solutions
générales de cette équation sont de la forme :
(1.52)
w x C
? m ?
a
x
a
x
a
(1.53)
(1.54)
Où est la flèche recherchée, ?? est la
fréquence angulaire et est la déformée modale.
En flexion pure, il vient :
?
w 1
0 ?
q
x D
? 11
4 4 (1.55)
14
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
Expressions de la flèche
En considérant qu'il s'agit d'une structure orthotrope,
la résolution de l'équation (1.55) donne
l'expression de la flèche dans le cas d'un chargement :
(1.55)
? Pour une plaque en appuis simples sur ses
extrémités :
(1.56)
? Pour une plaque Encastrées sur ses
extrémités :
(1.57)
? Pour une plaque Encastrées et en appuis simples sur ses
extrémités :
(1.57)
1.5. Comportement vibratoire des matériaux
composites
Une structure composite vibrant et sollicité en flexion
est toute structure qui se déforme transversalement en l'absence des
phénomènes de couplage membranaire-cisaillement, flexion-torsion
et ceux du couplage membrane-flexion-torsion.
1.5.1. Notion de la flèche
La flèche est le déplacement maximal qu'un point M
de la structure considérée peut atteindre au cours des
déformations temporaires de ladite structure. Le comportement de la
flèche est observable à partir de l'évolution de la
déformée. Il est donc clair qu'elle résulte du
déplacement transversal. Ce dernier est issu de l'équation de
mouvement d'un matériau sollicité soit en flexion soit au
flambement, etc.
1.5.2. Les types de flèches
Après analyse des articles consultés, il en ressort
que les flèches peuvent être regroupées en deux grandes
familles :
- Les grandes flèches : observables
lorsque le matériau est sollicité en flexion composée ou
au flambement ;
- Les petites flèches : observables
lorsque le matériau est sollicité en flexion pure. Dans le cadre
de cette recherche, nous analyserons analytiquement le cas des petites
flèches issues de la vibration en flexion pure.
1.5.2.1. Analyse à partir des vibrations d'une
poutre
a) Poutre en matériau isotrope
15
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
Le premier dispositif expérimental a été
développé par Adams et A. Fox [4J et, Adams et
Bacon afin d'évaluer l'amortissement des composites. Ce dispositif
permet d'étudier l'amortissement en flexion des poutres dans un domaine
de fréquence allant de 100 à 800 Hz et a été
utilisé dans le cas de différents stratifiés [5-
6J.
b) Poutre en matériau
composite
Bien que les poutres homogènes isotropes soient la base
de la théorie des poutres, les poutres non-homogènes et/ou
non-isotropes sont d'une grande importance. (Cedi & Delhi, 2005) ont
développé un modèle linéaire pour des poutres
non-homogènes présentant une courbure dans un
1.5.2.2. Analyse à partir des vibrations des
plaques et coques
Malgré l'intérêt particulier sur les
poutres continuent, les plaques et les coques reçoivent également
beaucoup d'attention. La caractéristique des plaques est que l'une de
leurs dimensions est plus faible que les deux autres. Cette
caractéristique est valable pour les coques, mais dans un repère
d'axes curvilignes.
Il existe deux types de plaques :
? Les plaques épaisses ou les plaques de Mindlin ;
? Les plaques minces ou les plaques de Love-Kirchhoff.
a) Cas des plaques en matériaux
isotropes
(Cheung & Zhou, 2000) ont utilisé la
méthode de Rayleigh-Ritz afin de résoudre des problèmes de
plaques de Mindlin homogènes isotrope, grâce à des
fonctions modales de Timoshenko « statiques ». Les mêmes
auteurs ont par la suite étendu leur recherche sur les plaques de
Mindlin homogènes isotropes fuselées (Cheung & Zhou,
2003).
(Y.-S. Lee & Lee, 1997) ont calculé la
réponse temporelle de plusieurs coques cylindriques en composites
multicouches simplement supportées pour plusieurs cas de chargement
transverses, grâce à la théorie des plaques du premier
ordre. Les résultats ont été validés grâce au
logiciel ABAQUS.
b) Cas des plaques en matériaux
composites
(Gong et al., 1999) ont étudié les
réponses vibratoires de plaques cylindriques monocouches et multicouches
suite à des impacts à basse vitesse en utilisant la
théorie de déformation en cisaillement d'ordre supérieur
« Higher order Shear Deformation Theory ». Les matrices de
rigidité utilisées sont les mêmes que des matériaux
isotropes à l'exception que la valeur des composantes varie à
travers l'épaisseur.
(Vo & Lee, 2008a) ont développé un
modèle vibratoire de poutres minces laminées orthotropes à
section creuse sur la base de la théorie des plaques de Kirchhoff-Love
qui prend en compte le couplage des modes de flexion et les modes de torsion et
qui est calculé par éléments finis.
(Qatu & Iqbal, 2010) ont utilisé le modèle
de poutres d'Euler-Bernoulli pour calculer les fréquences propres d'un
système de deux poutres cylindriques en composites orthotropes
articulées
16
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
entre elles et simplement supportées à leur
deuxième extrémité et possédant des masses
concentrées sur l'articulation.
1.6. Méthodes de résolution et
théories des problèmes de vibration
(Han, Benaroya, & Wei, 1999) ont
comparé3 les 4 théories les plus utilisées en
ce qui concerne les vibrations transverses : les modèles
adimensionnels des poutres d'Euler-Bernoulli, de Rayleigh, de
la poutre de cisaillement et de Timoshenko.
La différence entre le modèle de Rayleigh par
rapport à celui d'Euler-Bernoulli est qu'il prend en compte l'inertie de
rotation, le modèle de la poutre en cisaillement prend en compte le
cisaillement transversal et le modèle de Timoshenko prend en compte les
deux. Les hypothèses de base de ces théories sont que l'effet
Poisson est négligé et que les sections des poutres
étudiées possèdent deux axes de symétrie. Ce
dernier est le modèle le plus précis des quatre
énoncés. Les auteurs ont déterminé que lorsque le
coefficient d'élancement (« slenderness ratio ») est
supérieur à 100 le modèle d'Euler-Bernoulli convient bien
pour les calculs. Sinon, les modèles de Timoshenko ou de la poutre de
cisaillement devraient être préférés.
Les structures étudiées dans le cadre de cette
recherche possèdent un coefficient d'élancement supérieur
à 100. Donc, le modèle de Euler-Bernoulli est retenu pour la
modélisation du comportement vibratoire transversal.
1.7. Cadre de validité de la recherche
1.7.1. Problématique de la recherche
Dans les challenges des diverses réalisations de haute
technologie du monde, l'utilisation des matériaux composites est en
pleine essor et devient peu à peu incontournable. Ainsi, les
métaux se font substituer par des matériaux composites aux
propriétés fascinantes, comblant les besoins impérieux de
légèreté, rigidité et résistibilité
avec un bon comportement à la fatigue tout en offrant la
possibilité de concevoir et de façonner le matériau selon
la nécessité. Cette constitution particulière des
composites peuvent conférer un caractère biodégradable
dans le cas où les constituants même le sont ; dans ce cas, leur
utilisation est idéale pour des nouvelles conceptions visant à
protéger et à respecter l'environnement.
. L'analyse vibratoire est une thématique actuelle
importante, tant sur le plan académique qu'industriel. Cette
dernière touche de nombreux domaines, notamment l'automobile, la marine,
l'aéronautique, l'aérospatial, l'Architecture, les sports, la
défense, l'industrie lourde et le textile. Le contrôle des
vibrations dans les matériaux composites est un problème
épineux qui se pose fréquemment aux chercheurs. Le domaine des
vibrations connait depuis des années un regain d'intérêt du
fait du besoin d'optimiser et d'alléger les structures couramment
utilisées soumises à des niveaux d'excitations importants. C'est
pour cette raison que le comportement des matériaux composites est
depuis le sujet
3 La comparaison a été
effectuée pour résoudre les problèmes des vibrations
libres et forcées pour des conditions aux limites variées
grâce au principe de Hamilton.
17
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
des recherches exhaustives. De plus, au Cameroun, en
particulier au Génie Mécanique de l'ENSET, au Laboratoire de
Mécanique des matériaux (LAMMA) et Laboratoire de
Mécanique Et Productique (LMP) de l'UFD, les composites se font
développer, mais une véritable modélisation
comportementale n'est pas encore effectuée. Notre travail constituera en
partie à étudier le comportement de ces composites,
essentiellement l'aspect vibratoire.
En effet, Les vibrations produites par une structure peuvent
avoir des causes variées, dont certaines inhérentes au processus
du principe de fonctionnement de la machine. Le calcul vibratoire des
matériaux composites constitue l'une des applications les plus utiles de
la théorie des vibrations. Cette étude, peut
particulièrement s'appliquée au cas des panneaux de
signalisations et publicitaire. Ceux-ci s'endommagent souvent sous l'effet de
la fatigue et des vibrations engendrée par les forces
générées par le vent. Ces panneaux sont en
général faits en métaux, ce qui leur rend lourd, ne leur
confère pas un caractère non biodégradable et difficile
à installer. Donc, l'une des applications de ceux travail est de
substituer ces métaux par des composites légers,
biodégradable susceptible de s'adapter aux vibrations présentent
sur ladite structure. Il sera question d'interpréter la
variation de la déformée modale d'un matériau composite en
fonction des différents modes d'excitation.

Figure 1.8 : Images de quelques
structures soumises aux vibrations [8-9-10]
1.7.2. Couplage vibratoire
Une des hypothèses de cette recherche est qu'il
n'existe pas de couplages vibratoires avec les vibrations transversales. En
effet, la déformation transversale lors d'une flexion sur un pli
unidirectionnel (0° ou 90°) ou un stratifié orthotrope
croisé possédant une séquence d'empilement
symétrique ou antisymétrique dont les axes coïncident avec
les axes du stratifié n'est pas couplée avec une
déformation longitudinale. Pour éviter une possibilité de
couplage, seul les structures mentionnées ici, seront pris en compte par
le code développé.
18
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
1.7.3. Code de calcul développé
Le code développé dans le cadre de ce
mémoire est basé essentiellement sur la théorie
classique des stratifiés. Cependant, certaines hypothèses
simplificatrices ont été adoptées afin de s'assurer de
bien maîtriser le code et de bien comprendre les phénomènes
physiques qui s'y déroulent.
Le code construit traite uniquement les vibrations
transversales mais ne prend pas en compte les vibrations longitudinales,
l'effet Poisson, ni le cisaillement, ni les couplages de torsion. Ceci induit
des hypothèses menant sur le type d'élément que le code
peut traiter, pour que la torsion et le cisaillement n'apparaissent pas. En
effet, le code utilise des plis unidirectionnels ou orthotrope à 0°
et 90°, et des stratifiés croisés symétriques ou
antisymétriques bidirectionnels de [0/90].
1.7.4. Objectif de la recherche
L'objectif de cette recherche est de modéliser les
vibrations transversales d'un composite répondant aux hypothèses
de la théorie des plaques de Love-Kirchhoff et aux hypothèses de
Euler-Bernoulli tout en tenant compte des modèles
d'homogénéisation à « bornes » de Voigt et
Reuss. Le paramètre à évaluer dans cette
modélisation est la flèche et pour cela, il faut
précisément :
? Développer un modèle théorique de
calcul de la flèche et l'implémenter dans Matlab ;
? Simuler le comportement de la flèche des poutres et
des plaques composites dont les caractéristiques des constituants sont
connues ;
? Valider le modèle théorique par une
comparaison avec les résultats de la simulation du comportement de la
flèche des poutres et des plaques composites sous Abaqus ;
? Réaliser une analyse des résultats en mettant
en exergue l'influence des différents paramètres des structures
composites comme : la longueur, la hauteur, le taux de fibres et le module
d'Young des fibres dans le comportement de la flèche et proposer des
applications ;
En effet, la plupart des études s'arrêtent
à l'analyse des fréquences propres et ne s'intéresse pas
au comportement de la flèche qui d'ailleurs est un paramètre
important pour le constructeur dans la conception des édifices.
Les paramètres principaux du problème sont les
conditions limites de la poutre, les dimensions géométriques de
chaque couche, les matériaux utilisés et la séquence
d'empilement. Les paramètres qui traduisent les propriétés
des matériaux utilisés sont les modules de rigidité et les
coefficients de Poisson. Les modules de rigidité sont calculés
grâce à la rotation des matrices de souplesse de chaque
matériau dans ses axes principaux, autour de deux axes. Les
paramètres géométriques sont la longueur de la poutre, son
aire et son second moment de surface.
1.7.5. La méthode mathématique
utilisée dans le cadre de la recherche
Bien que plusieurs méthodes existent pour
résoudre le problème, tel qu'exposé dans la revue de
littérature, les méthodes de séparation des variables, de
Rayleigh et de Rayleigh-Ritz sont retenues.
19
Chapitre 1 : Etat de l'art sur le comportement
vibratoire d'un matériau composite
La méthode de séparation des variables permet de
résoudre une équation différentielle à plusieurs
variables. Elle est valable uniquement pour des structures en appuis
simples.
La méthode de Rayleigh-Ritz est sans aucun doute la
méthode la plus simple puisqu'elle conduit à des formules
polynomiales pour les fréquences propres. L'idée fondamentale de
cette méthode est de
donner une forme approchée de la déformée
modale d'une plaque en utilisant des résultats des
poutres. La méthode de Rayleigh sert à calculer
la plus petite fréquence appelée « Fréquence
fondamentale" en supposant que le déplacement w0 est
égal au produit d'une fonction de déplacement.
Parvenue au terme de cette revue bibliographique dont
l'objectif était de mettre en revue les matériaux composites et
leurs comportements, force est de constater que la constitution exceptionnelle
d'un matériau composite lui confère des performances
mécaniques importantes devant celles des matériaux
homogènes. Toutefois, ces performances en comportement mécanique
dépendent des paramètres comme : l'orientation des fibres, la
nature du renfort, le type de sollicitation, la fréquence de
sollicitation, la masse volumique du composite, les déplacements en
fonction des conditions aux limites. Variés et façonnables au
gré, les matériaux composites vont droits aux désirs des
concepteurs dans les domaines tels que : l'aéronautique, l'espace,
l'automobile, etc. Ces domaines très sensibles exposent les composites
à plusieurs comportements, notamment celui des vibrations. Parmi cette
foultitude de composites, notre analyse théorique s'appuiera sur des
plis et stratifiés orthotropes croisés dont les axes des couches
coïncident avec les axes du stratifié suivant le modèle
d'homogénéisation de Voigt et Reuss. Dans la même analyse
bibliographique nous avons présenté la notion de flèche et
les différentes méthodes de résolution d'un
problème vibratoire. Seules des vibrations transverses en flexion pure
seront traitées. Cette analyse se fera par le biais de la TCS qui
formule les équations de mouvement d'un stratifié pris comme
modèle des plaques de Love-Kirchhoff. Cette théorie sera
transposée sur les poutres répondant aux hypothèses de
Euler-Bernoulli. La résolution des différentes équations
se fera au moyen des méthodes de séparation des variables et la
méthode de Rayleigh-Ritz sur les différentes conditions aux
frontières. Dans la suite de ce travail, il sera question de formuler
les équations de comportement de la flèche d'un pli orthotrope et
d'un stratifié orthotrope.
CHAPITRE 2 : FORMULATION THEORIQUE DE L'EQUATION DE
COMPORTEMENT DE LA FLECHE EN VIBRATION DE FLEXION D'UNE STRUCTURE
ORTHOTROPE
Chapitre 2 :
FORMULATION THEORIQUE DE L'EQUATION
DE
COMPORTEMENT DE LA FLECHE EN VIBRATION DE
FLEXION D'UNE STRUCTURE
ORTHOTROPE.
Les vibrations sont omniprésentes dans tous les
équipements du secteur industriel provoquant parfois un
disfonctionnement de la machine. Ainsi, les vibrations mécaniques
doivent être prises en charge au cours de la conception des
matériaux avant d'être mis en application dans la conception des
structures. Le présent chapitre, a pour objectif de formuler
l'équation générale du comportement de la flèche
d'une poutre et d'une plaque d'un matériau composite de type pli
unidirectionnel ou orthotrope et stratifié croisé
symétrique ou antisymétrique. Pour y parvenir nous allons d'abord
ressortir l'équation de mouvement d'un stratifié dans le cas de
la flexion d'une plaque de Love-Kirchhoff puis sur une poutre de
Euler-Bernoulli en nous appuyant sur la théorie classique des
stratifiés, ensuite résoudre cette équation par la
méthode de séparation des variables et la méthode de
Rayleigh-Ritz, et enfin donner l'expression de la flèche pour chaque
condition aux limites.
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
2.1. Définition des paramètres du
problème.
Les structures composites traitées dans le cadre de
notre travail sont des plaques minces de Love-Kirchhoff et des poutres en
l'absence des couplages membrane-flexion-torsion.
? v ( x ,
y , t ) ? ? z ?
x
? ( , , ) ? ( , , )
? w x y t w x y t
2.1.1. Champ de déplacement cinématiquement
admissible du problème
La structure ne subissant aucun comportement en membrane, nous
avons :
?
u (x, y, t) ?
?z?y
0
;
?
Il vient : (2.1)
2.1.2. Champ de déformation
Le champ de déformation prend uniquement des
déformations de courbures dues à la flexion.
f
?? 2w0
? ? 2
? ?
? ?2w0
z x
? ?
?
?
(2.2)
21
zk ?? z y2
? ?
? 2 w
? ? ? ? ? ?
2z x y
??? ? ?
?
?
? ?
0 ? ? ?
2.1.3. Champ de déformation
La loi de Hooke à l'échelle du pli k, se
réduis à l'expression :
Q:2Q161 k 1
a = zQ'k
=z[Q:1
2
xy
Q16 Q
6 Q66 Jk k J
k
Q12 Q22 Q26 kyy
(2.3)
2.1.4. Equation constitutive et condition
d'équilibre dynamique de la structure L'équation
constitutive prend en compte les efforts appliqués à la
structure. Dans notre cas, nous avons à l'échelle du
stratifié :
?M 1 ?D D D 1 ?k 1
xx 11 12 16 xx
? ? ? ? ? ?
(2.4)
(2.5)
M ? ?Myy D12
D22 D26 kyy
??Mxy ???D16 D26 D66
????kxy ?
En développant, nous avons :
xx 11 xx 12 yy 16
M =Dk +Dk +Dkxy M = D
k + D k D k
yy 12 xx 22 yy +
26 xy
M = D k + D k +
D k
xy 16 xx 26 yy 66
xy
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
En l'absence des charges transversales , et des forces de
volumes, l'équation d'équilibre
dynamique est :
(2.6)
D'où : (2.7)
a 4 2
w a w
0 0
D ? ? 0
a a
x t
Il vient :
(2.8)
Cette équation est celle du mouvement transversal ou de
la déformée d'une structure orthotrope ou unidirectionnelle.
2.1.5. Les différents problèmes de flexion
à traiter
- En flexion pure d'une plaque orthotrope (en
l'absence du couplage flexion-torsion,
), nous avons en l'absence des chargement axiaux ( ) :
11 4 s 2
/i
w 0( x , t
) ? X ( x
) T ( t )
Il vient : (2.9)
- Flexion pure des poutres orthotropes : Le
problème est ramené sur les poutres en considérant que la
flèche est fonction soit de x, soit de y (suivant la
longueur de la poutre). Considérons dans notre cas que la flèche
est uniquement fonction de x, il vient en l'absence d'une charge en
membrane
4 a 2
a w
+ = 0
:
P a x a t
(2.10)
22
La résolution de ces équations
différentielles, donne l'équation de comportement de la
flèche.
Cette résolution se fait au moyen des différentes
conditions aux limites.
2.2. Vibrations en flexion pure des poutres
orthotropes
L'équation qui décrit les déplacements dus
aux vibrations en flexion dans une poutre est :
D w
11 0 0
4 2
(2.11)
s
D E I ? + _ ?
X E I
11 L xy ?
f f ( 1 f ) m
xy
? X E
? 2 ? ?
?
La solution générale recherchée de cette
équation est de la forme :
p b b
s
a 4 2
X a T (2.12)
? 2 4 . T ? 2 .
0
X ?
a x a t
En posant : (2.13)
En reportant (2.12) dans (2.11), il vient : (2.14)
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
|
En effectuant une séparation de variables dans (2.14),
il vient :
??4 2
X ?? X
? ? ? x ?
|
(2.15)
|
|
D'où le système :
|
4 2
??? ? ?
2 T ? 2 T 0
? ? ?t2
? ? 2 T ? 0
|
0
|
(2.16)
|
|
Avec :
|
?
? ?
|
0
1 2 3 4
T(t) = a sin wt
+ b cos wt
(2.25)
? X (0) ? 0
X"(0) ? 0
|
I B + B = 0
2 4
?? -- B + B =
0
2 4
(2.26)
? Conditions aux limites :
En :
23
Résolution de l'équation (2.16a)
Soit : (2.16a)
Posons : (2.17)
La solution de (2.16a) est de la forme : (2.18)
En reportant (2.18) dans (2.16a), il vient : (2.19)
D'où : ; ; ; . (2.20)
(2.18) devient : (2.21)
Or : et (2.22)
(2.21) devient équivalent à : (2.23)
à
déterminer avec des conditions aux limites.
Résolution de l'équation (2.16b) :
? 2 T 2 ? t x ?
0
Nous avons : (2.16b)
La solution de (2.16b) est de la forme : (2.24)
Donc, il nous vient à expliciter les équations
(2.23) et (2.24) en fonction des conditions aux limites.
2.2.1. Cas d'une poutre orthotrope en appuis simples
(AA)
B 2 ? B 4 ? 0

Figure 2.9 : Schéma d'une
poutre en appuis simples sur ses deux extrémités ? ?
w ( x , t
) = X ( x ) T
( t )
X(x) = B sin 2 x
+ B cos 2 x + B sinh
2 x + B cosh 2 x
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
En :
(2.27)
(2.135) et (2.135) sous forme matricielle, donne :
(2.28)
Pour , nous avons : (2.29)
Il vient : (16) ; (2.30)
? Fréquence
angulaire :
w 0( x ,0)
(2.30) dans (2.17) : (2.31)
? Déformée modale :
1
w x = Ø 0 (
,0) D m m
? ? w x
=
Les relations (2.27) et (2.23) permettent d'écrire : 0 (
,0) = C ?Ø 0 m m
(2.32)
En posant : , la déformée modale
(2.33)
Il vient : (2.34)
a m ,r n ,r [ =
a / 2; n m
j sin x sin xdx = ?
a a ? ~
0; n m
D'où : (2.35)
Avec : ; (2.36)
Déterminons et à partir des conditions de
stationnarité :
? ? ?
C 0
a a
n ? m ? n ?
w x xdx D
0 ( ,0)sin ? ? sin x sin
xdx
a a a
0 0
?
2 a
D ? ? w x
m ? xdx
a a
0
A
0 ( ,0)sin
m m (2.37)
|
0
Or les déformées modales sont orthogonales, et :
q 0 3 2 3
w x
0 ( ,0) ? ( x ? 2 ax
? a ) x
|
(2.38)
|
m
Donc :
(2.39)
Où est la déformée en statique.
Pour une poutre orthotrope en appuis simples, nous avons :
q m ?
0 3 2 3
D ? f ?
( x 2 ax ? a )
x sin xdx
(2.40)
24
a
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
· Equation de comportement de la flèche
: Donc pour une poutre en appuis simples, nous avons :
(2.42)
Avec : ; (2.43)
1 7nTi n
[A][B] =[ 0] (2.49)
Et : (2.44)
Cette équation de la flèche justifie le fait
que, tous les modes se superposent au cours de la vibration d'une structure. Le
mode fondamental correspond à m=1, de
fréquence angulaire :
B B
2 + 4
(2.45)
2.2.2. Cas d'une poutre orthotrope encastrées sur
ses deux extrémités (EE) I L
w (x, t) =
X(x)T(t)
X(x) = B sin
2x+B cos 2x+B sinh2x+B
cosh 2x
1 2 3 4

Figure 2.10 : Schéma d'une poutre
encastrée sur ses deux extrémités
T(t)=asin at+b
cos at
l2 (B1 cos2a-B2 sin
2a+B3 cosh 2a+B4 sinh2a)
· Conditions aux limites :
?X(0) = 0
En :
t
X'(0)=0 ??/1,( -B1
+B3)
I?
0
0
B2? ?B4
?
(2.47)
B1
B3

B1
r
sin 2a+B2 cos 2a+B3
sinh2a+B4 cosh2a = 0
=0
?X(a)?0
En : tr(a)?0
(2.48)
(2.47) et (2.48)
|
sous forme matricielle, donne :
|
|
?0 1 0 1 ?B1??0?
? ? ? ? ? ?
? 0 ? 0 ? ? ? ?
B0
???
2
? sin ? a cos ?
a sinh ? a cosh
?aB
? ? ? ? ?
0
3
? ? ? ? ? ?
? ?cos ?a
??sin ?a ?cosh ?a
?sinh?a??B4??0? Pour
[BIT * 0, nous avons : det(A) ? 0
|
|
|
Il vient : cos A,a cosh Act=1
(2.50) Ani = (m + 0.5)n-;
;mE
(2.51)
a
· 25
Fréquence angulaire :
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
(2.51) dans (2.17) : (2.52)
· Déformée modale
:
(2.48b), devient : (2.53)
D'où : (2.54)
sin 2a -- sink A,a
Il vient, pour le mode m :
(2.55)
Et : (2.56)
En posant : (2.57)
Il vient pour le déplacement transversal :
? 0( ,) ?
(2.58)
Déterminons et
A t=0 jrw°(x'O)~~m
(2.59)
m ?m ?0
C m
(n+0.5)ir (m+0.5)ir
(n+0.5)ir
? ? =
w0 (x,0)sin xdx = D
f sin x sin xdx
0 a o a a
2
a
0
[af
(2.60)
Or les déformées modales sont orthogonales, et
:
a sin (m+0.5*
x sin (n+0.5*
xdx
0 a a
[a/2;n=m
j0;
J
n#m
(2.61)
xdx
0
Donc : D ? ?w0
(x,0)sin ?m
a
(2.62)
26
Où est la déformée en statique.
Pour une poutre orthotrope en appuis simples, nous avons :
w0 (x,0) ? q0
(x2? 2ax ? a2 )x2
24D11
a
Il vient : D ? q0 ?
(x2 ? 2ax ? a2
)x2 sin mir
12aD11 0 a
|
(2.63)
(2.64)
|
|
· Equation de comportement de la flèche
:
Donc pour une poutre en appuis simples, nous avons :
w0(x, t) ? E Dm
cos ?mt?m (x)(2.65)
m
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
Avec : (2.66)
12aD11 0
Où : ; (2.67)
(2.68)
Cette équation de la flèche justifie le fait que,
tous les modes se superposent au cours de la
vibration d'une structure. Le mode fondamental correspond
à m=1, de fréquence angulaire :
?
?
B ?
?B
2 4
(2.69)
2.2.3. Cas d'une poutre orthotrope encastrée et
libre (EL) w (x, t) =
X(x)T(t)
X(x) = B sin
2x+B cos 2x+B sinh2x+B
cosh 2x
1 2 3 4
?

Figure 2.11 : Schéma d'une poutre en
appuis simples sur ses deux extrémités I L
T(t)=asin at+b
cos at
X'(0)=0
ItA,(-B1
+B3)
? I
(-B1 cos A,a+B2 sinA,a
+B3 coshA,a+B4 sinhA,a)
· r
0
0
?
Conditions aux limites :
?
B1
B3
B2 +B4
?X(0) = 0
(2.71)
En :
?
?
?
?
?
A,2 (-B1 sin A,a -
B2 cos A,a + B3 sinh A,a
+ B4 cosh A,a)
En :
=0
(2.72)
I1A,3
X"(a)?0
=0
X"'(a)?0
27
(2.71) et (2.72) sous forme matricielle, donne :
?0 1 0 1 ? ? B1??0?
? ? ? ? ? ?
?0 ? 0 ? ?B2 ?
0
2 2 2 2
? ?? sin ? a ??
cos?a ? sinh ? a ?
cosh ?aB
? ? ? ? ?
0
3
? ? ? ? ? ?
3 3 3 3
??? cos?a ? sin
? a ? cosh ? a ?
sinh ?a ??B4??0
?
|
[A][B] =[o](2.73)
|
|
Pour [BIT * 0 , nous avons : det(A) = 0
(2.74)
Il vient : cos Act cosh il a = -1
(2.75) Am = (m - 0.5) g ; (2.76)
· Fréquence angulaire :
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
(2.17) dans (7) :wm=
· Déformée modale
:
|
2 _
(2.77)
|
|
Par un raisonnement analogue au précédent, il
vient, pour le mode m :
[ a/2;n=m
(2.78)
Et : (2.79)
En posant : (2.80)
Il vient pour le déplacement transversal :
(2.81)
Déterminons et
a
w x xdx ? D
0 ( ,0)sin ? sin x sin xdx
0 0
At=01
2 a
|
mTin
a a a
?
x3-4ax-18a2?x2
|
(2.82)
|
|
?n?0.5?? a
?m?0.5?? ?n?0.5??
m
0
?
?
? Cm
?
(2.83)
Or les déformées modales sont orthogonales, et
:
asin(m-0.5)
7rxsin(n-0.5)7rxdx
0 a a
j0; n # m
J
(2.84)
xdx
0
Donc : D ? ?w0
(x,0)sin ?m
a
(2.85)
28
Où est la déformée en statique. Pour une
poutre orthotrope en appuis simples, nous
12aD11 0
avons :
|
q0
__
w0 (x) 24D11
|
a
|
(2.86)
|
Il vient : D = q0 f
(x3-4ax-18a2)x2
|
Om (x)dx (2.87)
|
|
· Equation de comportement de la flèche
:
Donc pour une poutre encastrée-libre, nous avons :
w0(x,t) ? ?Dm
cos ?mt?m(x)(2.88)
m
a
Avec : Dm = q0 f (x3 --
4ax --18a2) x2Om (x)dx
(2.89)
12aD110
sinh Am -- sin Am
Où : Om(x)= (cosh
ilmx-- cos
flmx)--ym(sinhilmx-- sin
ilmx) ; 7m =
COSh iim + cos m
|
;(2.90)
|
|
29
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
Et : (2.91)
Cette équation de la flèche justifie le fait que,
tous les modes se superposent au cours de la vibration d'une structure. Le mode
fondamental correspond à m=1, de
fréquence angulaire :
(2.92)
Les expressions de D11 sont données dans (1.35)
et (1.37) en fonction du type de structure. 2.3. Expressions explicites de la
flèche d'une plaque stratifiée orthotrope
L'équation qui décrit les déplacements dus
aux vibrations de flexion dans la plaque est :
|
|
|
|
(2.93)
(2.94)
(2.95)
(2.96)
(2.97)
|
La solution recherchée est de la forme :
Posons
: ; ;
|
1
Y
|
|
|
|
|
4
|
|
|
|
2.3.1. Cas d'une plaque orthotrope en appuis simples
(AAAA)
Considérons une plaque en appuis simples
configurée comme le montre la figure ci-dessous :
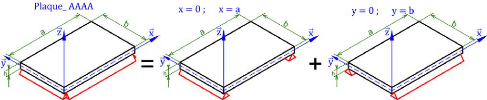
Figure 2.12 : Plaque
rectangulaire en appuis simples sur ses 4 côtés (AAAA)
Résolvons (2.97a) : Posons Xm (x) =
sin m? x (2.98)
a
ax 4 a a
a2 mn 2 mn
D'où : 2 = sin x ,
ax a a
|
4 4
a X_ mr sin
m r x (2.99)
|
|
(m?
4 2? 2 2 1
a2Y??2 ?4Y 1??4 2.100
a) Cam2r )
Yax2????y4.Y (2.100)
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
~Y4 -2~2I a I axe +I I
I -"JY=O (2.101)
l J zLl J
Posons à nouveau : ~z (2.102)
4 12 2 4
Il vient : (2.103)
a ôx a J
[?B2 +B4 = B2
=B4 =O (2.109)
Les solutions de (2.103) sont de la
forme :
(2.104)
Après résolution de (2.104), il vient :
a1 = û1 ; ; ; (2.105)
2 4 2 4
Avec : û1 = k2 m~ + m~ + 4
; 02 - k2 m7r - 7717r + iî 4
(2.106)
a a a a
Donc : (2.107)
Ou (2.108)
B1, B2,
B3, B4 =
ctes à déterminer avec des conditions aux
limites.
? X(a)?0
lO
(_B1sinO2b_B2cosO2
b)+O12(B3 sinh
O1 b+B4 cosh
O1b)
· Conditions aux limites :
En : ?X(0)=0 =
-02B2+01B4=0
jX"(0) = 0
En : 1X"(a)?0
?? B1
sinO2b+B1
cosO2b+B3
sinhO1b+B1
coshO1b =
0
=0
(2.110)
30
(2.109) et (2.110) sous forme matricielle, donne :
|
?0 1 0 1 ? ? B1? ?0?
? ? ? ? ? ?
?0 ? 0 B2 0
? sin ? cos
2 b ? sinh
2 b ?1 b cosh ?
0
1 b B
? ? ? ? ?
3
? ? ? ? ? ?
? ? ? ? ? ? ?
2 2 2 2
? ? cos a ? cos inh cosh
2 2 2 b 1 1 b
?
1 1 b ? ?B4 ? 0?
|
(2.111)
|
Pour [BIT 0, nous avons : (2.112)
Il vient : (û, +û2)2
sinhû1b sin 02b = 0 (16) ;
(1.113)
? En tenant compte de (2.106), nous avons : 62n =
k2 m~ - m~ + ~;, =(fur
(2.114)
· Fréquence angulaire :
2 4 2
a a b
2 212
2
D'où : ~4 k2(mir (rur
-(rmi - cons; (2.115)
a b J a 82
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
En développant (2.115), puis en posant , il vient :
(2.116)
? Déformée modale :
En tenant compte de (2.109), (2.110) et (2.108), il vient :
a b
Y(y) = Bn Sin b y (2.117)
En posant : , la déformée modale
(2.118)
a b
Les relations (2.98), (2.117) et (2.118) permettent
d'écrire (2.94) :
Qmn= 64 q0 z .
Il vient :
D'où :
Or :Jsin(2m sin(2k-Ondxfsin(2n-Onsin(21-1)ndy=~;m=w;
(2.119)
mnab~ (2m
-1)(2n -1)D2m-1,2n-1
0 ax
Par un raisonnement analogue à celui des poutres, nous
avons : , et
1
Jsin2(2m-1)~xdxf
sin2(2n-1)~ydy
0
?
?
(2.120)
? ?
16 q 1
0
w x y ?
0 ( , ) ? 2 ??
mn (2 m ? 1)(2 n
? 1) D
x
sin 2 1
? ? ?
m? ? sin
2n?1
?y ? a b
Avec :
?
?
?
(2.121)
4 2 2 2 4 4
2 ?1 R
m ? 1 n ? 1 2 m
? 1,2 n ? 1
D ? D m
? ? ?
2 ?1 ?2 D ?2D ?? ? ? ?
2m?1 2n?1 R ?D ?
n ?
2m?1,2n?1 11 12 66 22
16 q0 1
Donc, pour une plaque en appuis simples, nous avons :
w0(x,y,t)
= EE(Qmn cos
Wmnt)bmn(x,y)(2.122)
m n
Avec : Q =
mn mnr2 (2m
-1)(2n -1)D2m-1,2n-1
; (2.123)
Y'
31
/x, Y) = sin mIr
xsin b sin xsinB
(2.124)
mn\ a m
znY
D2m-1,2n-1
=D11(2m-1)4+2(D12+2D66)(2m-1)2(2n-1)2R2+D22(2n-1)4R4(2.125)
2
TC r
Et : O)mn = 2 1 Lm4D11 +
2m2n2R2 (D12 +
2D66 )
a Ps
|
+ n2R4D22 ] (2.126)
|
|
Donc, la plaque vibre comme un assemblage complet de n
poutres en appuis simples suivant y et de m poutres en
appuis simples suivant x.
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
Pour les autres conditions aux limites, les fonctions
X(x) et Y(y) seront choisie comme dans le cas d'une poutre en
fonction des conditions aux limites. La méthode Rayleigh- Ritz permettra
d'expliciter le déplacement transverse et par l'approximation de
Rayleigh nous ressortirons l'expression de la fréquence propre pour un
mode ????.
2.3.2. Approche par la méthode de Rayleigh
La résolution de l'équation (2.93) est
très complexe pour des plaques dont les quatre côtés ne
sont pas en appuis simples. L'approche vibrationnelle développée
dans ce contexte par Rayleigh [11] permet de déterminer
les fréquences propres avec une marge de 1% des valeurs réelles
pour des plaques n'ayant pas de côtés libres et absence du
chargement en membrane. Cette méthode considère que le
système étudié est conservatif 4.
2.3.3. Energie de déformation
L'énergie totale de déformation est
exprimée par :
U?
2 2 2
? 2 2 2 2 2
1 ? ? ? ? ?
a b w w w ? ? ? ? ? ? ?
w w
? 0 0 0 0 0
2 4
? ? 11 ? 2 ? ? 12 2 2 22 2 66
2
D D ? ? ? ? ? ? ?
D D dxdy
(2.127)
En décomposant sur les axes de référence,
nous obtenons :
(2.128)
En tenant compte des hypothèses de la théorie des
stratifiées (azz = O,Eyz = Ezz
= 0) et du fait
que le matériau est un stratifié orthotrope
dont les axes coïncident avec les axes de références (D16 =
D26 = 0) sollicité en flexion pure (6z, = 0) ,
l'énergie de déformation a pour expression :
2 x ? 0 y ? 0 ? ? ?
? ? x ? x ? y
? ? ? ? ?
? y ? y ?
d
|
(2.129)
? ? ? ? ? ? ? ? ? ? ?
? dxdydz
? t t t
2 2 2
1 u v w
E C ? ? ? ? ? ? ? ? ? ? ?
s
2 ? ? ? ? ? ? ? ? ? ? ? ? ? ?
|
|
2.3.3.1. Energie cinétique
L'énergie cinétique totale d'un solide
s'écrit :
(2.130)
1
32
En tenant compte des considérations d'études du
§1.3, il vient :
2 a fb 2
ECMax = 2 Psi Jx=0
Jy=0 w0dxdy (2.131)
2.3.3.2. Formulation du théorème
d'énergie en théorie des stratifiées
En l'absence de charge transverse q, la fonction
énergie maximum pour un stratifié orthotrope est donnée
par :
2 2 2
? 2 2 2 2 2
? ? ? ?
1 a b w ? ? ? ? ?
w w w ? ? ?
w
0 0 0 0 0 2 2
U ? E ? ? D
? ? ? ? ? ? ? w ? dxdy
11 ? ? ? 2 D D 4 D
dMax CMax 2 12 2 2 22 2 66 2 s 0
2 ? ? ? ?
x ? 0 y ? 0 ? ? ?
? ? x ? x ? y ?
?
? y ? ?
? y ? ?
(2.132)
4 Système conservatif : Energie potentielle
maximale = Energie cinétique maximale.
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
La fonction d'énergie est obtenue en posant :
Avec : (2.133)
La résolution de ce
système [3J, donne l'expression de la fréquence
angulaire :
Donc : w x y t ?
?? Q ? t
? x y
0( , , ) ( mn cos
mn ) mn ( ,
33
Où les valeurs des coefficients C1, C2 et C3 sont
fonctions des conditions aux appuis. [Annexe 1]. 2.3.4. Cas d'une plaque
orthotrope à côtés encastrés (EEEE)
cos ? i ? cosh ? i
? ?
i sin ? ? sinh
? i
i
m n
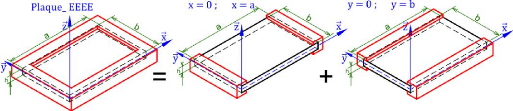
Figure 2.13 : Plaque rectangulaire
encastrée sur ses 4 côtés (EEEE) Par analogie au cas
d'une poutre encastrée à ses deux extrémités, nous
avons pour :
?
?
|
Les côtés X = 0 et X = a
encastrés :
Les côtés y = 0 et y = b
encastrés, nous avons :
Où : Et
|
|
(2.135)
(2.136)
(2.137) (2.138a)
(2.138b)
(2.139)
|
|
|
)
2.3.1. Cas d'une plaque orthotrope à deux
côtés opposés encastrés et les deux autres en appuis
simples (AEAE)

Figure 2.14 : Plaque
encastrée sur 2 côtés consécutifs et en appui simple
sur les 2 autres (AEAE). Par analogie au cas d'une poutre encastrée
à ses deux extrémités, nous avons pour :
? Les côtés X = 0 et X = a en
appuis simples, nous avons :
Chapitre 2 : Formulation théorique de
l'équation de comportement de la flèche en vibration de flexion
d'un composite
|
|
|
(2.83)
|
|
|
Les côtés y = 0 et y = b encastrés, nous
avons :
|
|
|
|
|
(2.84)
|
|
|
|
(2.138)
|
|
;
|
|
Donc :
|
|
|
|
Parvenue au terme de ce chapitre portant sur le calcul
vibratoire en flexion d'un matériau composite, il est important de
constater que l'objectif de la détermination des équations de
comportement de la flèche a été atteint au moyen de la
formulation de la théorie classique des stratifiés basée
elle-même sur le modèle cinématique d'une plaque de
Love-Kirchhoff. Cette théorie classique nous a permis de déduire
l'équation de comportement de mouvement correspondant au mouvement
transverse pour le cas d'une structure stratifié unidirectionnelle ou
orthotrope sollicitée en flexion. L'extension de cette théorie
sur la théorie des poutres nous a permis de ressortir l'équation
des vibrations transverses d'une poutre. La solution de ces équations
obtenue par la méthode de séparation des variables exprime la
flèche recherchée en fonction de la déformée
modale, de la fréquence angulaire et du temps. En considérant les
différentes conditions aux extrémités, la condition de
stationnarité5 et en tenant compte de la fonction
d'énergie comme l'impose la méthode de Rayleigh-Ritz, nous avons
ressortie l'expression explicite de la
fréquence propre pour un mode d'excitation. Cependant,
l'effort de calcul au moyen d'une méthode
analytique manuelle est
très important et prend beaucoup trop de temps. Raison pour laquelle, il
sera question par la suite, d'implémenter ses équations dans le
logiciel Matlab pour effectuer une simulation du comportement de la
flèche.
34
5 Stationnarité : identifié ici par un flambement
statique ou une flexion statique.
CHAPITRE 3 : SIMULATION NUMERIQUE SOUS MATLAB DU
COMPORTEMENT DE LA FLECHE D'UNE STRUCTURE COMPOSITE.
Chapitre 3 :
SIMULATION NUMERIQUE SOUS MATLAB DU COMPORTEMENT DE LA
FLECHE D'UNE STRUCTURE COMPOSITE
Les vibrations sont des oscillations ou des mouvements de
va-et-vient très rapide. Cette définition est justifiée
par les expressions complexes des fréquences angulaires propres et des
équations de comportement de la flèche établies au
chapitre précédent. Face à cette complexité, il est
donc clair que la résolution analytique manuelle prendra beaucoup plus
de temps et nécessitera effort de calcul très important. Pour
remédier à cela, nous allons résoudre ces équations
numériquement à l'aide du logiciel Matlab. Pour y parvenir, nous
allons d'abord traduire les différentes équations en script,
ensuite nous lancerons le calcul pour pouvoir visualiser numériquement
et graphiquement les différents résultats et enfin nous une
interprétation des différents résultats sera effectuer.
36
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
3.1. Notion de simulation sous Matlab
MATLAB (MATrix LABoratory) est un puissant logiciel
de développement et de programmation très avancé
destiné aux chercheurs scientifiques, aux ingénieurs et
étudiants de divers spécialités (Physique,
Mécanique, Mathématiques, etc.).
3.1.1. Objectif de la simulation sous Matlab
Réaliser des simulations numériques
basées sur des algorithmes d'analyse numérique. Il peut donc
être utilise pour la résolution approchée
d'équations différentielles, d'équations aux
dérivées partielles ou de systèmes linéaires,
etc...
3.1.2. Intérêt de la simulation sous
Matlab
Matlab a été choisi dans le cadre de cette
recherche parce qu'il permet de résoudre sous forme numérique des
problèmes très complexes pouvant nécessiter de grandes
puissances de calcul.
3.2. Présentation du composite
étudié
Dans le cadre de cette étude, nous utilisons un
matériau composite constitué d'une matrice polyester et
renforcé par des fibres de RC (Rhectophyllum Camerunense)
[12J. En effet, la matrice polyester est utilisé parce qu'elle
est disponible en quantité dans le marché local et les fibres de
RC parce qu'elles sont légères avec un grand module
d'Young [1J.
Tableau 3.1 : Tableau des
caractéristiques des constituants
Caractéristiques des constituants
|
Matrice Polyester
|
Fibres RC
|
[GPaJ
|
[GPaJ
|
|
[Kg/m3J
|
[GPaJ
|
[GPaJ
|
|
[Kg/m3J
|
2.8-3.6
|
1.40
|
0.4
|
1200
|
2.3-17
|
1.38-10.2
|
0.2
|
947
|
|
3.3. Programmation des équations de la
flèche sous Matlab
Dans cette simulation, nous nous intéressons aux
flèches maximales de la structure, pour cela, nous allons programmer
sous Matlab, l'équation de comportement de la flèche pour une
structure de type pli. Dans ce test il sera question d'évaluer pour un
élément, la :
· Variation de la flèche maximale en fonction des
dix premiers modes d'excitations ;
· Influence de la longueur de l'élément sur
le comportement de la flèche maximale ;
· Influence de la hauteur de l'élément sur le
comportement de la flèche maximale ;
· Influence du type de section de l'élément
sur le comportement de la flèche maximale ;
· Influence du taux sur le comportement de fibres de la
flèche maximale ;
· Influence du module d'Young sur le comportement de la
flèche maximale.
37
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
3.3.1. Présentation des éléments et
des conditions aux limites de la simulation
Dans cette simulation, nous utiliserons des
éléments de types poutre et plaque unidirectionnelle à
0°. Les conditions aux limites sont présentées dans le
tableau ci-dessous :
Tableau 3.2 : Présentation
des différentes conditions aux limites
|
Plaque
|
|
Plaque_AAAA
|
|
|
|
Poutres
|
|
Poutre_EE
|
|
|
|
|
Poutre_AA
|
|
|
|
|
Poutre_EL
|
|
|
|
3.3.2. Modélisation des éléments dans
le cas de l'élément poutre
3.3.2.1. Cas d'une poutre EE
Dans ce cas, les poutres simulées sont prismatiques de
dimensions 150x10x15 mm à section rectangulaire renforcées avec
un taux X?? = 60%.
a) Variation de la flèche maximale en fonction
des dix premiers modes d'excitations Présentation graphique des
résultats
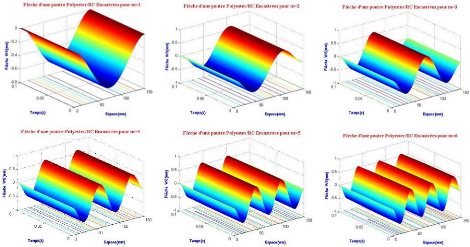
Figure 3.15 : Graphe de variation
de la flèche maximale pour les 6 premiers modes
38
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
Présentation numérique des
résultats
Ces résultats présentent les valeurs des
flèches maximales pour les différents modes. Tableau
3.3 : Valeurs des flèches maximales pour les 10
premiers modes d'une poutre EE
|
Flèche maximale d'une poutre composite
encastrée en Polyester/RC
|
|
X 1 = 35% ; ; ; :
rectangulaire ;150x15x15
|
|
Modes
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
|
Flèche (mm)
|
0,5830
|
0,5540
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|

W0max (mm)
0,585
0,575
0,565
0,555
0,58
0,57
0,56
0,55
0,583
1 2 3 4 5 6
Mode "m"
0,554
0,5552
0,5552
0,5552
W0max=f(m)
Figure 3.16 : : Graphe de
variation de la flèche maximale en fonction des modes
Le mode fondamental 1, présente la flèche
maximale. Le mode 2 traduit le régime transitoire avec un pourcentage de
chute de 4.97% du mode 1 ; le mode 3 et les autres modes traduisent le
régime permanant avec un pourcentage d'élévation de 0,21%
par rapport au mode 2 et un écart relatif de 4,76% avec le mode
fondamental présenté comme le plus dangereux.
b) Influence de la longueur de la poutre sur le
comportement de la flèche maximale.
Dans ce test il est question de faire varier la longueur
« a » de la poutre, puis visualiser le comportement de la
flèche.
Tableau 3.4 : Valeurs des
flèches maximales avec différentes longueurs pour 5 modes d'une
poutre EE.
|
Poutre EE
|
Composite : Polyester/RC
|
Xf = 0.35
|
Ef = 8.5
|
|
Flèche maximale (mm)
|
q0 = 1N
|
h = 15
|
|
Modes
|
a = 80
|
a = 150
|
a = 250
|
a = 500
|
a = 750
|
a = 1000
|
Moyenne
|
Ecart type
|
|
1
|
1,0931
|
0,5830
|
0,3498
|
0,1749
|
0,1166
|
0,0874
|
0,41221667
|
0,39343837
|
|
2
|
1,0388
|
0,5540
|
0,3324
|
0,1662
|
0,1108
|
0,0831
|
0,39175
|
0,37389842
|
|
3
|
1,0411
|
0,5552
|
0,3331
|
0,1666
|
0.1110
|
0,0833
|
0,3926
|
0,37471908
|
|
4
|
1,0410
|
0,5552
|
0,3331
|
0,1666
|
0,1110
|
0,0833
|
0,39258333
|
0,37468447
|
|
5
|
1,0410
|
0,5552
|
0,3331
|
0,1666
|
0,1110
|
0,0833
|
0,39258333
|
0,37468447
|
39
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
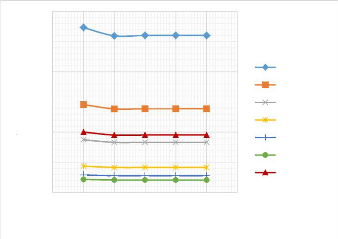
W0max (mm)
0,8
0,6
0,4
0,2
1,2
0
1
0 1 2 3 4 5 6
Mode "m"
a=80 mm a=150 mm a=250 mm a=500 mm a=750 mm a=1000 mm
Moyenne
Figure 3.17 : Influence de la
longueur de la poutre sur le comportement de la flèche
La flèche maximale croit avec la diminution de la
longueur de la poutre. Car la période des oscillations augmente avec la
longueur de la poutre. La figure ci-dessous présente une poutre de
longueur 1000 mm excitée au 5ème mode et le
tableau présente les valeurs des fréquences pour
différentes longueurs.
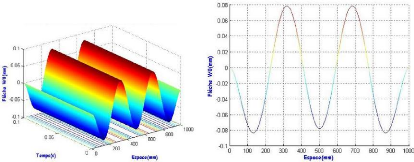
Figure 3.18 : Comportement de la
flèche sur une poutre EE de longueur 500 mm
Tableau 3.5 : Valeurs des
fréquences angulaires maximales avec différentes longueurs pour 5
modes d'une poutre EE.
|
Poutre
EE
|
Composite : Polyester/RC
|
Xf = 0.35
|
Ef = 8.5
|
|
Fréquence angulaire maximale
(Rad/s)
|
g0 = 1N
|
h = 15
|
|
Modes
|
a = 150
|
a = 250
|
a = 500
|
a = 750
|
a = 1000
|
Moyenne
|
Ecart type
|
|
1
|
124,8
|
44,9
|
11,2
|
5,00
|
2.80
|
37,74
|
51,5456
|
|
2
|
499
|
179,7
|
44,9
|
2,00
|
11,2
|
147,36
|
209,0835
|
|
3
|
1122,8
|
404,2
|
101,1
|
44,9
|
25,3
|
339,66
|
463,7052
|
|
4
|
1996,1
|
718,6
|
179,7
|
79,8
|
44,9
|
603,82
|
824,3913
|
|
5
|
3118,9
|
1122,8
|
280,7
|
124,8
|
70,2
|
943,48
|
1288,0936
|
40
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
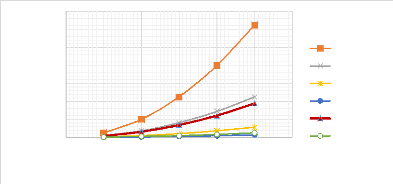
ù0max (rad/s)
3500
3000
2500
2000
1500
1000
500
0
0 1 2 3 4 5 6
Mode "m"
a=150 mm a=250 mm a=500 mm a=1000 mm Moyenne a=750
mm
Figure 3.19 : Influence de la
longueur de la poutre EE sur les fréquences angulaires propres Plus
une poutre est longue, moins elle vibre. Donc, les poutres
élancées ont tendance à absorber les vibrations.
c) Influence de la hauteur de la poutre sur le
comportement de la flèche maximale.
Dans ce test il est question de faire varier la hauteur totale
« h » de la poutre, puis visualiser le comportement de la
flèche.
Tableau 3.6 : Valeurs des
flèches maximales pour différentes hauteurs des 5 premiers modes
d'une poutre EE.
|
Poutre
EE
|
Composite : Polyester/RC
|
Xf = 0.35
|
Ef = 8.5
|
|
Flèche maximale (mm)
|
g0 = 1N
|
a = 150
|
|
Modes
|
h = 10
|
h = 15
|
h = 20
|
h = 25
|
h = 30
|
Moyenne
|
Ecart type
|
|
1
|
1,9676
|
0,5830
|
0,2459
|
0,1259
|
0,0729
|
0,59906
|
0,79035
|
|
2
|
1,8698
|
0,5540
|
0,2337
|
0,1197
|
0,0693
|
0,5693
|
0,75105
|
|
3
|
1,8739
|
0,5552
|
0,2342
|
0,1199
|
0,0694
|
0,57052
|
0,75272
|
|
4
|
1,8738
|
0,5552
|
0,2342
|
0,1199
|
0,0694
|
0,5705
|
0,75267
|
|
5
|
1,8738
|
0,5552
|
0,2342
|
0,1199
|
0,0694
|
0,5705
|
0,75267
|
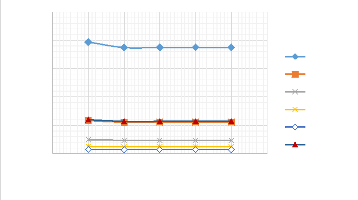
W0max (mm)
2,5
0,5
1,5
2
0
1
0 1 2 3 4 5 6
Mode "m"
h=10 mm h=15 mm h=20 mm h=25 mm h=30 mm
Moyenne
Figure 3.20 : Influence de la
hauteur de la poutre (EE) sur le comportement de la flèche.
41
Chapitre 3 : Simulation numérique du
comportement vibratoire d'une structure composite
Lorsque la hauteur d'une poutre est grande, la structure
devient de plus en plus rigide et provoque ainsi une diminution de la
flèche maximale. La figure ci-dessous présente une poutre de
hauteur 15 mm excitée au mode 5.
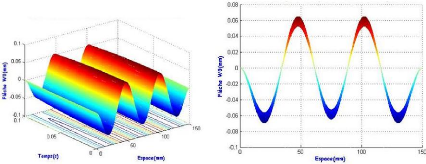
Figure 3.21 : Influence de la
hauteur de la poutre (EE) sur les caractéristiques vibratoires.
Tableau 3.7 : Valeurs des
fréquences maximales pour différentes hauteurs des 5 premiers
modes d'une poutre EE.
|
Poutre
EE
|
Composite : Polyester/RC
|
Xf = 0.35
|
Ef = 8.55
|
|
Fréquence angulaire maximale
(Rad/s)
|
g0 = 1N
|
a = 150
|
|
Modes
|
h = 8
|
h = 10
|
h = 12
|
h = 15
|
Moyenne
|
Ecart type
|
|
1
|
66,5
|
83,2
|
99,8
|
124,8
|
93,575
|
24,86260579
|
|
2
|
266,1
|
332,7
|
399,2
|
499
|
374,25
|
99,34433384
|
|
3
|
598,8
|
748,5
|
898,2
|
1122,8
|
842,075
|
223,5289299
|
|
4
|
1064,6
|
1330,7
|
1596,9
|
1996,1
|
1497,075
|
397,3689501
|
|
5
|
1663,4
|
2079,3
|
2495,2
|
3118,9
|
2339,2
|
620,8922988
|
ù0max (rad/s)
3500
3000
2500
2000
1500
1000
500
0
0 1 2 3 4 5 6
Mode "m"
h=8 mm h=10 mm h=12 mm h=15 mm
Moyenne
Figure 3.22 : Influence de la
hauteur de la poutre (EE) sur les fréquences angulaires.
42
Chapitre 3 : Simulation numérique du
comportement vibratoire d'une structure composite
La fréquence angulaire croit avec l'augmentation de
hauteur de la poutre. Plus une poutre est rigide et plus elle est sensible aux
vibrations transversales.
d) Influence du type section d'une poutre sur le
comportement de la flèche maximale.
Dans ce test, il est question d'analyser l'influence du type
de section sur le comportement de la flèche d'une poutre. Pour y
parvenir, nous modifierons l'expression du moment quadratique « 4 »
caractérisant le type de section.
Tableau 3.8 : Valeurs des
flèches maximales pour différents types de sections d'une poutre
EE suivant les 5 premiers modes d'excitations.
|
Xf= 0.35
|
Ef= 8.5
|
|
|
q0= 1N
|
a= 150
|
|
Poutre EE
|
Composite : Polyester/RC
|
|
Flèche maximale (mm)
|
|
S_Rect.-P
|
S_Rect.C
|
S_Cir.-P
|
S_Cir.C
|
S_Car. -P
|
S_Car.C
|
|
Modes
|
|
1
|
0,5830
|
0,5830
|
0,5830
|
0,5830
|
0,5830
|
0,5830
|
|
2
|
0,5540
|
0,5540
|
0,5540
|
0,5540
|
0,5540
|
0,5540
|
|
3
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
|
4
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
|
5
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
0,5552
|
Pour des poutres de section rectangulaire, carrée et
circulaire, soumises à des vibrations, la valeur de la flèche
maximale d'une poutre encastrée à ses deux
extrémités n'a pas d'influence sur le comportement de la
flèche. Donc la flèche d'une structure composite est liée
aux caractéristiques des constituants. Néanmoins, nous observons
une modification de la période d'oscillation.
Tableau 3.9 : Valeurs des
fréquences maximales pour différents types de section d'une
poutre EE suivant les 5 premiers modes d'excitations.
|
Poutre EE
|
Composite : Polyester/RC
|
|
Fréquence angulaire maximale
(Rad/s)
|
|
Modes
|
S_Rect.-P
|
S_Rect.C
|
S_Cir.-P
|
S_Cir.C
|
S_Car. -P
|
S_Car. -C
|
|
1
|
112,352
|
99,4807
|
86,2296
|
80,4481
|
79,4449
|
74,1183
|
|
2
|
312,0889
|
276,3353
|
239,5267
|
223,467
|
220,6802
|
205,8841
|
|
3
|
611,6943
|
541,6172
|
469,4723
|
437,9953
|
432,5332
|
403,5328
|
|
4
|
1011,2
|
895,3264
|
776,0665
|
724,033
|
715,0038
|
667,0645
|
|
5
|
1,51E+03
|
1337,5
|
1159,3
|
1081,6
|
1068,1
|
996,479
|
|
Moyenne
|
711,5675
|
630,052
|
546,112
|
509,5087
|
503,1525
|
469,416
|
|
Ecart type
|
560,5109
|
496,3102
|
430,1856
|
401,3528
|
396,3435
|
369,767
|
43
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
ù0max (rad/s)
1600
1400
1200
1000
800
600
400
200
0
1 2 3 4 5
Modes "m"
S_Rect.-P S_Cir.-P S_Car. -P S_Rect.C S_Cir.C
S_Car.C
Figure 3.23 : Influence du type de
section d'une poutre (EE) sur les fréquences angulaires.
Donc, les poutres à sections rectangulaires ont des
fréquences angulaires plus importantes que les autres sections, tandis
que les poutres à sections carrées ont des fréquences
propres moins élevées. e) Influence du taux de fibres
sur le comportement de la flèche maximale.
Dans ce test, il est question de faire varier le taux de
fibres d'une poutre et observer le comportement de la flèche.
Tableau 3.10 : Valeurs des
flèches maximales pour différents taux de fibres d'une poutre EE
suivant les 5 premiers modes d'excitations.
|
Poutre EE
|
Composite : Polyester/RC
|
a = 150
|
|
Flèche maximale (mm)
|
Ef = 8.5
|
|
Modes
|
Xf= 0.25
|
Xf= 0.35
|
Xf= 0.50
|
Xf= 0.60
|
Moyenne mi
|
|
1
|
0,6515
|
0,5830
|
0,5053
|
0,4648
|
0,55115
|
|
2
|
0,6192
|
0,5540
|
0,4802
|
0,4417
|
0,523775
|
|
3
|
0,6205
|
0,5552
|
0,4812
|
0,4427
|
0,5249
|
|
4
|
0,6205
|
0,5552
|
0,4812
|
0,4426
|
0,524875
|
|
5
|
0,6205
|
0,5552
|
0,4812
|
0,4426
|
0,524875
|
|
Moyenne Xi
|
0,62644
|
0,56052
|
0,48582
|
0,44688
|
|
|
Ecart type
|
0,0141
|
0,0126
|
0,011
|
0,010026
|
w0max (mm
0,65
0,55
0,45
0,7
0,6
0,5
0,4
0 1 2 3 4 5 6
Modes "m"
Xf=0,25 Xf=0,35 Xf=0,50 Xf=0,60
Moyenne
Figure 3.24 : Influence du taux
de fibres sur le comportement de la flèche d'une poutre (EE).
44
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
Plus le taux de fibres est important dans une poutre moins la
flèche est importante. Mais, nous observons une modification de la
période d'oscillation. Donc, le taux de fibres est responsable de la
diminution de la flèche.
Tableau 3.11 : Valeurs des
fréquences maximales pour différents taux de fibres d'une poutre
EE suivant les 5 premiers modes d'excitations.
|
Poutre EE
|
Composite : Polyester/RC
|
|
Fréquence angulaire maximale
(Rad/s)
|
|
Modes
|
???? = ??.????
|
???? = ??.????
|
???? = ??.????
|
???? = ??.????
|
|
1
|
115,8
|
124,8
|
137,8
|
146,3
|
|
2
|
463,2
|
499
|
551,18
|
585,3
|
|
3
|
1042,2
|
1122,8
|
1240,2
|
1316,8
|
|
4
|
1852,8
|
1996,1
|
2204,8
|
2341,1
|
|
5
|
2894,9
|
3118,9
|
3444,9
|
3657,9
|
|
Moyenne
|
1273,78
|
1372,32
|
1515,776
|
1609,48
|
|
Ecart type
|
1119,697
|
1206,327
|
1332,43
|
1414,814
|
ù0max (rad/s)
4000,4
3500,4
3000,4
2500,4
2000,4
1500,4
1000,4
500,4
0,4
0 1 2 3 4 5 6
Modes "m"
Xf=0,25 Xf=0,35 Xf=0,50 Xf=0,60
Figure 3.25 : Influence du taux de
fibres sur les fréquences angulaires dans une poutre (EE)
Les graphes des figures (3.12 et 3.13) montrent que plus le
taux de fibres est important dans une poutre (EE), plus la fréquence
angulaire est aussi importante.
f) Influence du module d'Young des fibres sur le
comportement de la flèche maximale. Dans ce test, il est
question de faire varier le taux de fibres d'une poutre et observer le
comportement de la flèche.
Tableau 3.12 : Valeurs des
flèches maximales pour différents modules d'Young d'une poutre EE
suivant les 5 premiers modes d'excitations.
|
Poutre
EE
|
Composite : Polyester/RC
|
?? = ??????
|
???? = ??.????
|
|
Flèche maximale (mm)
|
?????????? = ??.??
|
?????????? = ????
|
|
Modes
|
??????????
|
??/????????
|
???? = ??????
|
??/????????
|
??????????
|
Moyenne
|
Ecart type
|
|
1
|
1,0649
|
0,9946
|
0,5830
|
0,445
|
0,3598
|
0,68946
|
0,32165033
|
|
2
|
1,0120
|
0,9452
|
0,5540
|
0,4228
|
0,3419
|
0,65518
|
0,30570179
|
|
3
|
1,0142
|
0,9473
|
0,5552
|
0,4238
|
0,3426
|
0,65662
|
0,30637316
|
|
4
|
1,0141
|
0,9472
|
0,5552
|
0,4237
|
0,3426
|
0,65656
|
0,30633926
|
|
5
|
1,0141
|
0,9472
|
0,5552
|
0,4237
|
0,3426
|
0,65656
|
0,30633926
|
45
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
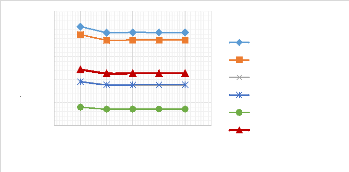
w0max (mm)
0,8
0,6
0,4
0,2
1,2
1
0 1 2 3 4 5 6
Modes "m"
Ef=Efmin=2,3 Ef=1/3Efmoy=2,83 Ef=Efmoy=8,5
Ef=3/2Efmoy=12,75 Ef=Efmax=17 Moyenne
Figure 3.26 : Influence du module
d'Young des fibres sur le comportement de la flèche de la poutre (EE).
Plus le module d'Young de fibres est important dans une poutre moins la
flèche est importante. Donc plus les fibres sont résistantes,
plus la structure est rigide et plus la flèche est réduite. Ceci
s'accorde avec les résultats obtenus lorsque nous faisions varier la
hauteur.
Tableau 3.13 : Valeurs des
fréquences maximales pour différents modules d'Young des fibres
d'une poutre EE suivant les 5 premiers modes d'excitations.
|
Poutre
EE
|
Composite : Polyester/RC
|
a = 150
|
Xf = 0.35
|
|
Flèche maximale (mm)
|
Ef = 8.5
|
Ef = 8.5
|
|
Modes
|
Efmin
|
1/3Ef m
|
Ef = Ef m
|
3/2Efm
|
Efma
|
Moyenne
|
Ecart type
|
|
1
|
92,3
|
95,5
|
124,8
|
142,8
|
158,8
|
122,84
|
29,0496
|
|
2
|
369,2
|
382,1
|
499
|
571,2
|
635,2
|
491,34
|
116,1718
|
|
3
|
830,8
|
859,6
|
1122,8
|
1285,2
|
1429,3
|
1105,54
|
261,4214
|
|
4
|
1479,6
|
1528,2
|
1996,1
|
2284,9
|
2541
|
1965,96
|
464,0802
|
|
5
|
2307,7
|
2387,8
|
3118,9
|
3570,1
|
3970,3
|
3070,96
|
726,2101
|
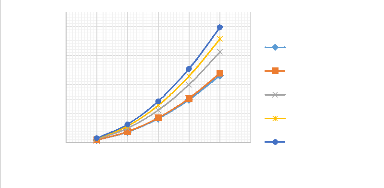
ù0max (rad/s)
2500,4
2000,4
4500,4
4000,4
3500,4
3000,4
1500,4
1000,4
500,4
0,4
0 1 2 3 4 5 6
Modes "m"
Ef=Efmin=2,3 Ef=1/3Efmoy=2,83 Ef=Efmoy=8,5
Ef=3/2Efmoy=12,75 Ef=Efmax=17
Figure 3.27 : Influence du taux
de fibres sur les fréquences angulaires dans une poutre (EE)
Les graphes des figures (3.12 et 3.13) montrent que plus le
module d'Young des fibres est important dans une poutre (EE), plus la
fréquence angulaire est aussi importante. Donc, la fréquence
angulaire varie avec la résistance des fibres.
46
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
3.3.2.2. Cas d'une poutre EL
Dans ce cas, les poutres simulées sont prismatiques de
dimensions 150x15x15 mm à section rectangulaire renforcées avec
un taux X f = 35%.
a) Variation de la flèche maximale en fonction
des dix premiers modes d'excitations Présentation graphique des
résultats
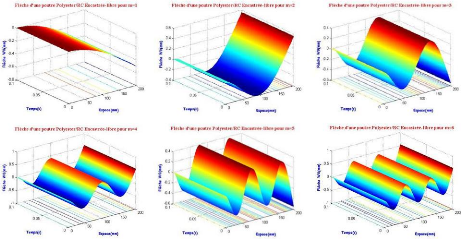
Figure 3.28 : Comportement de la
flèche pour les 6 premiers modes d'une poutre EL
Présentation numérique des
résultats
Ces résultats présentent les valeurs des
flèches maximales pour les différents modes. Tableau
3.14 : Valeurs des flèches maximales pour les 10
premiers modes d'une poutre EL
|
Flèche maximale d'une poutre composite
encastrée en Polyester/RC
|
|
X f = 35% ; ; ; :
rectangulaire ;150x15x15
|
|
Modes
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
|
Flèche
(mm)
|
0,5050
|
0,5505
|
0,5506
|
0,5506
|
0,5506
|
0,5506
|
0,5506
|
0,5506
|
0,5506
|
0,5506
|
Pour une poutre encastrée-libre, la flèche croit et
converge pour les 3 premiers modes et devient constante jusqu'au
10ème mode.

W0max (mm)
0,56
0,55
0,54
0,53
0,52
0,51
0,5
0 1 2 3 4 5 6
0,505
0,5505 0,5506 0,5506 0,5506
Modes "m"
Flèche (mm)
Figure 3.29 : Graphe de variation
de la flèche maximale en fonction des modes
47
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
Le mode fondamental 1 est le moins influent car,
présente la flèche minimale. Le mode 2 traduit le régime
transitoire avec un pourcentage d'élévation de 8,2% du mode 1 ;
le mode 3 et les autres modes traduisent le régime permanant avec un
pourcentage d'élévation de 0,02% par rapport au mode 2 et un
écart relatif de 9,03% avec le mode fondamental présenté
comme le plus dangereux.
Influence du taux de fibres sur le comportement de la
flèche maximale.
Dans ce test, il est question de faire varier le taux de
fibres d'une poutre et observer le comportement de la flèche.
Tableau 3.15 : Valeurs des
flèches maximales pour différents taux de fibres d'une poutre EL
suivant les 5 premiers modes d'excitations.
|
Poutre EL
|
Composite : Polyester/RC
|
a = 150
|
|
Flèche maximale (mm)
|
Ef = 8.5
|
|
Modes
|
Xf= 0.25
|
Xf= 0.35
|
Xf= 0.50
|
Xf= 0.60
|
Moyenne mi
|
|
1
|
0,5644
|
0,5050
|
0,4377
|
0,4026
|
0,477425
|
|
2
|
0,6153
|
0,5505
|
0,4771
|
0,4389
|
0,52045
|
|
3
|
0,6154
|
0,5506
|
0,4472
|
0,4390
|
0,52055
|
|
4
|
0,6154
|
0,5506
|
0,4472
|
0,4390
|
0,52055
|
|
5
|
0,6154
|
0,5506
|
0,4472
|
0,4390
|
0,52055
|
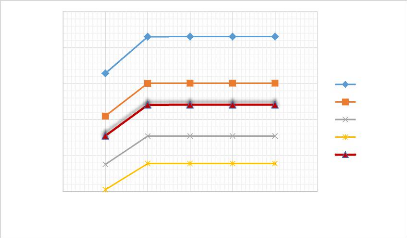
w0max (mm)
0,65
0,55
0,45
0,6
0,5
0,4
0 1 2 3 4 5 6
Modes "m"
Xf=0,25 Xf=0,35 Xf=0,50 Xf=0,60
Moyenne
Figure 3.30 : Influence du taux
de fibres sur le comportement de la flèche d'une poutre (EL).
Donc, plus le taux de fibres est important dans une poutre EL
moins la flèche est importante. Les figures ci-dessus montrent une
poutre EL à section rectangulaire de longueur « a=200, h=15, »
excitée au mode 5 renforcé avec un taux de fibres > 35%.
48
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
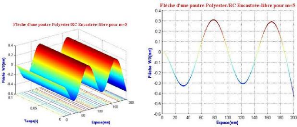
Figure 3.31 : Influence un
taux de fibres > 35% de la poutre (EL) sur les caractéristiques
vibratoires.
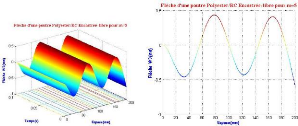
Figure 3.32 : Influence un
taux de fibres < 35% de la poutre (EL) sur les caractéristiques
vibratoires. Du point de vue cinématique, la poutre EL a plus de
degrés de libertés que la poutre EE. Donc lorsqu'on structure
possède moins de degrés de libertés, le mode fondamental
n'est plus critique.
3.3.2.3. Cas d'une poutre AA
Dans ce cas, les poutres simulées sont prismatiques de
dimensions 150x15x15 mm à section
rectangulaire renforcées avec un taux X?? = 35%.
Présentation graphique des résultats
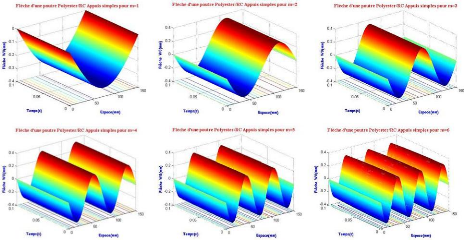
Figure 3.33 : Comportement de la
flèche pour les 8 premiers modes d'une poutre AA
Présentation numérique des
résultats
49
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
a) Influence de la longueur de la poutre sur le
comportement de la flèche maximale. Dans ce test il est
question de faire varier la longueur « a » de la poutre, puis
visualiser le
comportement de la flèche.
Tableau 3.16 : Valeurs des
flèches maximales avec différentes longueurs pour les 5 premiers
modes d'une poutre AA.
Poutre
AA
|
Composite : Polyester/RC
|
Xf = 0.35
|
Ef = 8.5
|
|
g0 = 1N
|
h = 15
|
Longueur
|
a = 80
|
a = 150
|
a = 200
|
a = 500
|
a = 750
|
a = 1000
|
Moyenne
|
Ecart type
|
w0max
|
0,6883
|
0,3671
|
0,275
|
0,1101
|
0,0734
|
0,0551
|
0,2615
|
0,242650522
|
|
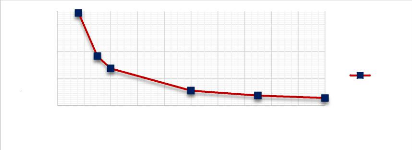
w0max (mm)
0,6
0,4
0,2
0
0 100 200 300 400 500 600 700 800 900 1000
longueur "a" (mm)
w0max
Figure 3.34 : Comportement de la
flèche en fonction de la longueur d'une poutre AA Donc la
flèche maximale décroit et converge avec la diminution longueur
d'une poutre AA.
b) Influence de la hauteur de la poutre sur le
comportement de la flèche maximale.
Dans ce test il est question de faire varier la hauteur «
h » de la poutre, puis visualiser le comportement de la flèche.
Tableau 3.17: Valeurs des
flèches maximales avec différentes longueurs pour les 5 premiers
modes d'une poutre AA.
|
Poutre
AA
|
Composite : Polyester/RC
|
Xf = 0.35
|
Ef = 8.5
|
|
Flèche maximale (mm)
|
g0 = 1N
|
h = 15
|
|
Longueur
|
h = 8
|
h = 10
|
h = 12
|
h = 15
|
h = 18
|
h = 20
|
Moyenne
|
Ecart type
|
|
w0max
|
0,3630
|
0,1858
|
0,1075
|
0,0551
|
0,0319
|
0,0232
|
0,12775
|
0,118686123
|
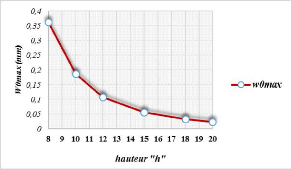
Figure 3.35 : Comportement de la
flèche en fonction de la hauteur d'une poutre AA
50
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
Donc la flèche maximale décroit et converge avec
la croissance de la hauteur d'une poutre AA.
c) Influence du taux de fibres sur le comportement de
la flèche maximale d'une poutre AA. Dans ce test il est
question de faire varier la hauteur « h » de la poutre, puis
visualiser le comportement de la flèche.
Tableau 3.18: Valeurs des
flèches maximales avec différentes longueurs pour les 5 premiers
modes d'une poutre EE.
|
Poutre AA
|
Composite : Polyester/RC
|
Xf = 0.35
|
Ef = s. 5
|
|
Flèche maximale (mm)
|
g0 = 1N
|
h = 15
|
|
Longueur
|
X f = 0.25
|
Xf = 0.35
|
Xf = 0.50
|
Xf = 0.60
|
Moyenne
|
Ecart type
|
|
w0max
|
0,0615
|
0,0551
|
0,0477
|
0,0439
|
0,05205
|
0,007830496
|
W0max (mm)
0,065
0,055
0,045
0,06
0,05
0,04
0,24 0,35 0,46 0,57
hauteur "Xf"
w0max
Figure 3.36 : Comportement de la
flèche en fonction du taux de fibre dans la poutre AA
Donc la flèche maximale décroit et converge avec la
croissance du taux de fibre contenu dans une poutre AA.
3.3.2.4. Conclusion simulation des poutres
Donc, pour une application de poutres nécessitant une
minimisation de la flèche, il est
recommandé d'après cette analyse d'utiliser une
poutre de longueur supérieure à 200 mm, de hauteur
supérieure ou égale à 15 mm, avec un taux de
fibres supérieur ou égal à 35% de module d'Young
moyen supérieur ou égal à 8,5 GPa.
3.3.3. Modélisation des éléments
dans le cas d'une plaque en appuis simples Considérons une
plaque (pli orthotrope) rectangulaire constituée d'une matrice de
polyester et de
fibres de RC. Le pli est unidirectionnel et orienté
à 0°.
Mode 1 : m=1 ; n=1 Mode 2
: m=1 ; n=2 Mode 2 : m=2 ; n=1
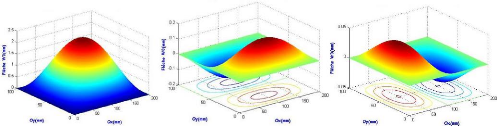
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
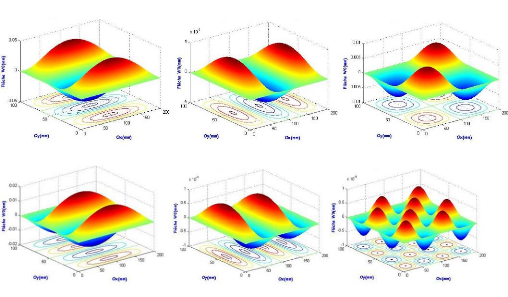
Mode 3 : m=1 ; n=3 Mode 3
: m=3 ; n=1 Mode 3 : m=2 ; n=2
Mode 4 : m=1 ; n=4 Mode 4
: m=4 ; n=1 Mode 4 : m=4 ; n=4
Mode 5 : m=1 ; n=5 Mode 5
: m=5 ; n=1 Mode 5 : m=5 ; n=5
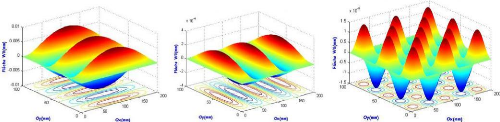
51
Figure 3.37 : Comportement de la
flèche d'une plaque AAAA (pli à 0°) pour 5 modes.
Présentation numérique des
résultats
Ces résultats présentent les valeurs des
flèches maximales pour les différents modes. Tableau
3.19 : Valeurs des flèches maximales pour les 5
premiers modes d'une plaque AAAA
|
Em = 2, 8 GPa
|
Plaque rectangulaire 200x100x0,35 en
composite
Polyester/RC
|
Xf = 0.35
|
|
E = 8, 5 GPa
|
g0 = 100 N
|
|
Modes
|
1
|
2
|
3
|
4
|
5
|
|
m
|
1
|
1
|
2
|
1
|
3
|
1
|
4
|
1
|
5
|
|
n
|
1
|
2
|
1
|
3
|
1
|
4
|
1
|
5
|
1
|
|
Pli à 0°
|
|
W0Ma?? 2,314 0,17 0,042 0,0417 0,0041 0,016 8,33E-5
0,007 2,49E-5
|
|
Pli à 90°
|
|
W0Ma?? 0,4524 0,0032 0,1060 2,8E-4 0,0343 5,47E-4
0,0145 1,6E-4 0,0073
|
52
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
|
|
|
|
Stratifié [0/90]5
|
|
|
|
|
|
W0Max
|
0,032
|
0,0018
|
0,0018
|
4,25E-4 4,25E-4
|
1,62E-4
|
1,62E-4
|
7,87E-5
|
7,87E-5
|
|
|
|
|
Stratifié [0/90]5
|
|
|
|
|
|
W0Max
|
0,3991
|
0,0222
|
0,0222
|
0,0053 0,0053
|
0,0020
|
0,0020
|
9,78E-4
|
9,78E-4
|
Ces résultats montrent que le mode fondamental est le
plus dangereux. Car, la flèche est maximale pour ce mode. Les graphes
ci-dessous présentent le comportement de la flèche pour les
différentes structures.
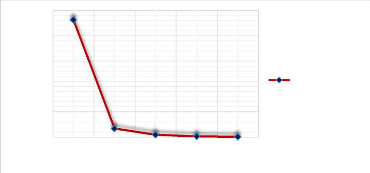
1 2 3 4 5
Modes
2,5
2
1,5
1
W0Max
0,5
0
2,314
0,17
0,047 0,016 0,007
w0max pli à 0°
Figure 3.38 : Comportement de la
flèche d'une plaque AAAA (pli à 0°) pour 5 modes.
Pour un pli à 0°, la flèche au mode 2 est
obtenue avec un pourcentage de chute de 92.65% sur le mode fondamental 1. Cette
flèche décroit et converge avec les modes.
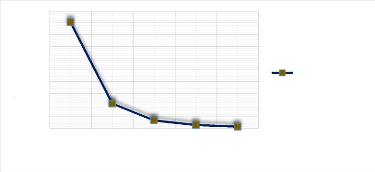
W0Max
0,45
0,35
0,25
0,15
0,05
0,5
0,4
0,3
0,2
0,1
0
0,4524
1 2 3 4 5
Modes
0,106
0,0343
0,0145
0,0073
w0max pli à 90°
Figure 3.39 : Comportement de la
flèche d'une plaque AAAA (pli à 90°) pour 5 modes.
Pour un pli à 90°, la flèche au mode 2 est
obtenue avec un pourcentage de chute de 76.57% sur le mode fondamental 1. Cette
flèche décroit et converge avec les modes.
53
Chapitre 3 : Simulation numérique du comportement
vibratoire d'une structure composite
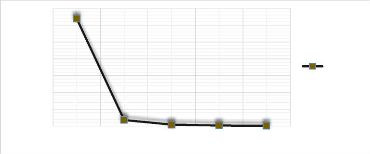
W0Max
0,035
0,025
0,015
0,005
0,03
0,02
0,01
0
0,032
1 2 3 4 5
Modes
0,0018
4,25E-04 1,62E-04
7,87E-05
w0max
stratifié
[0/90]s
Figure 3.40 : Comportement de la
flèche d'une plaque AAAA (stratifié symétrique à
[0/90]s) pour 5 modes. Pour un stratifié
symétrique à [0/90]s, la flèche au mode 2 est
obtenue avec un pourcentage de chute de 94.375% sur le mode fondamental 1.
Cette flèche décroit et converge avec les modes.

W0Max
0,45
0,35
0,25
0,15
0,05
0,4
0,3
0,2
0,1
0
0,3991
1 2 3 4 5
Modes
0
02
,
0,002 9,78E-04
w0max stratifié...
Figure 3.41 : Comportement de la
flèche d'une plaque AAAA (stratifié antisymétrique
à [0/90]s) pour les 5
premiers modes.
Pour un stratifié antisymétrique à
[0/90]s, la flèche au mode 2 est obtenue avec un pourcentage
de chute de 94.44% sur le mode fondamental 1. Cette flèche
décroit et converge avec les modes.
En définitive, les objectifs que nous poursuivons dans
ce chapitre ont été atteint, à savoir visualiser et
analyser le comportement des éléments de structures (plaques et
poutres). L'implémentation des équations sous Matlab nous a
fourni des résultats acceptables, car pour chaque élément
testé, les conditions aux limites étaient respectées au
préalable. Il a été constaté que les
paramètres comme la longueur, la hauteur, le taux de renforcement et le
module d'Young des fibres influencent raisonnablement sur le comportement de la
flèche au cours des vibrations transversales libres pour une structure
sollicitée en flexion et configurée sous diverses conditions aux
limites essentiellement. Aussi, nous avons constaté que ces
caractéristiques influencent sur la fréquence angulaire propre et
la période des oscillations. Les résultats obtenus restent
à être valider soit par une confrontation avec des
résultats expérimentaux, soit par confrontation avec les
résultats de la méthode des éléments finis ou par
confrontation des résultats d'un test expérimental tiré de
la littérature. Ces deux derniers process de validation seront
développés dans le chapitre 4.
CHAPITRE 4 : SIMULATION NUMERIQUE SOUS ABAQUS DU
COMPORTEMENT DE LA FLECHE D'UNE STRUCTURE COMPOSITE ET VALIDATION DU CODE DE
CALCUL
Chapitre 4 :
SIMULATION NUMERIQUE SOUS ABAQUS DU COMPORTEMENT DE LA
FLECHE D'UNE STRUCTURE COMPOSITE ET VALIDATION DU CODE DE CALCUL
La méthode des éléments finis est
très utilisée pour résoudre directement des
problèmes qui ne sont pas ou sont difficilement résolubles avec
les méthodes analytiques. Ce modèle est capable de gérer
des séquences d'empilement arbitraires. Ainsi, la méthode des
éléments finis donne la possibilité de trouver la solution
la plus proche de la réalité, en remplaçant le
système continu par un système discret caractérisé
par un nombre finis de paramètres. Dans le cadre de ce travail, nous
présenterons d'abord la méthode éléments finis,
ensuite nous allons modéliser grâce au logiciel Abaqus le
comportement de la flèche d'un matériau composite, les
résultats obtenus par ce dernier seront confrontés avec ceux
obtenus au chapitre 3 et enfin, nous allons procéder à la
validation du code de calcul développé à partir d'une
confrontation des résultats du code de calcul développé
avec ceux obtenus expérimentalement sur une structure stratifiée
[0/90] par les travaux de M. Assarar, A. El Mahi & J.-M. Berthelot
présentés dans le cadre 19ème
Congrès Français de Mécanique tenu à Marseille, les
24 et 28 août 2009.
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
55
4.1. Présentation de la méthode des
éléments finis
Comme toutes les méthodes, la méthode des
éléments finis est basée sur un principe et possède
une méthode de résolution des problèmes.
4.1.1. Principe de la méthode des
éléments finis
L'analyse du comportement d'une structure par la
méthode des éléments finis consiste à mailler ou
discrétiser la structure considérée en
éléments (segment de droit ou arc pour une structure
linéique ; triangle ou quadrilatère pour une structure surfacique
; prisme, tétraèdre, hexaèdre, etc. pour une structure
volumique) et à établir aux noeuds du maillage les relations
force-déplacement, en tenant comptes des conditions aux limites et de
chargement de la structure. Le champ des déplacements en un point
quelconque est obtenu par résolution numérique du système
d'équations linéaires de grande dimension.
Pour créer le maillage d'une structure, il faut la
subdiviser en petits morceaux polygonaux sans créer des recouvrements et
des ouvertures. Donc le maillage est un ensemble de sous- domaines
fermés de formes géométriques polygonaux.
4.1.2. Différentes étapes de la
méthode des éléments finis
Elle possède quatre étapes principales :
(1) Le maillage : c'est la
décomposition de la géométrie en sous domaines de formes
géométriques simples ;
(2) Champ de déplacement
élémentaire : pour un élément e,
ressortir l'expression du champ de déplacement en fonction des
déplacements aux noeuds (degrés de libertés) de
l'élément, ainsi que l'énergie de déformation et la
matrice de rigidité ;
(3) Assemblage : à partir
des matrices élémentaires respectives, établir les
matrices globales (rigidité, masse, force, etc.) par assemblage ;
(4) Conditions et solutions :
mettre en place les différentes conditions aux limites et de chargement
de la structure puis déterminer les déplacements inconnus, ainsi
que les déformations et les contraintes dans chaque
élément.
4.2. Modélisation du comportement de la
flèche d'un matériau composite en vibrations libres
transverses
L'objectif essentiel d'une simulation utilisant les
méthodes numériques dans le domaine de génie
mécanique réside à prédire correctement le
comportement des pièces ou des mécanismes durant leur fabrication
et en état de service à partir des caractéristiques
mécaniques de chacun des composants du dispositif étudié
et de leurs interfaces.
4.2.1. Intérêt de la modélisation
numérique
Durant ces dernières années, l'essor du calcul
numérique a indubitablement accéléré dans le
secteur industriel et il offre des possibilités tels que :
Chapitre 4 : Simulation numérique sous Abaqus du
comportement de la flèche d'une structure composite et validation du
code
56
? La description complète de la situation
analysée : les champs de déplacements, contraintes,
fréquentielles sont facilement déterminés par une relation
cause-conséquences.
? L'estimation des paramètres difficilement
accessibles : le calcul des critères d'endommagement
difficilement mesurables au cours des essais et de suivre en continu
l'évolution de dégradation du matériau sur l'ensemble de
la pièce ;
? La modification, l'amélioration et
l'innovation potentielles : possibilité d'effectuer par
d'effectuer une analyse du comportement en fonctionnement d'une pièce
sans avoir à la fabriquer. Ce qui a pour avantage de modifier,
aisément et autant que nécessaire la géométrie, le
design, les conditions d'utilisation ainsi que l'ensemble des différents
paramètres pouvant avoir une influence sur le comportement des
différents éléments concernés ;
? La limitation du coût des études
: la modélisation numérique permet de
réduire le financement tout en gagnant en temps au cours d'un projet
;
? La réduction des risques industriels
: testé préalablement de façon
numérique, le comportement des pièces en développement
limite fortement les risques de casse et minimise donc les risques d'incidents
matériels et humains.
La modélisation numérique présente donc
de nombreux avantages par rapport aux expérimentations en laboratoire ou
en conditions industrielles. Sa mise en oeuvre nécessite toutefois une
bonne connaissance de la réalité industrielle et des
phénomènes physiques mis en jeu, ainsi que certains moyens
matériels. Par contre, elle ne permet pas de s'affranchir de
l'étape finale qu'est la validation expérimentale ou
industrielle. Cette validation s'effectuant à partir
d'expériences dont les résultats sont plus ou moins
dispersés. Les simulations numériques ne permettent d'obtenir
qu'une estimation de la réalité.
4.2.2. Justification du choix de ABAQUS
Le choix du code ABAQUS repose principalement sur deux
raisons. D'une part, de nombreux travaux de modélisation
numérique adaptés aux problèmes spécifiques des
vibrations en flexion ont été réalisés avec
succès en utilisant ce code. D'autre part, les diverses capacités
de ce code correspondent bien à nos besoins, à savoir, ABAQUS
permet de prendre en compte les caractéristiques spécifiques des
constituants d'un matériau composite (direction des fibres, nombres de
couche, épaisseur des couches, et même les différents
modules de l'ingénieur peuvent être définies suivant chaque
direction, etc.). La puissance d'Abaqus nous permet de choisir le type de
composite (orthotrope, unidirectionnel, etc.). Il ouvre notamment une porte aux
utilisateurs en leur permettant de programmer des lois de comportement
spécifiques des matériaux et des interfaces. Aussi, le maillage
du code prend en compte la théorie de Love-Kirchhoff à travers le
type d'élément STRI68. Ce code est puissant et comporte des
modules utiles, tel que le module en langage Python script afin de faciliter
une étude paramétrique sous ABAQUS. Tous
Chapitre 4 : Simulation numérique sous Abaqus du
comportement de la flèche d'une structure composite et validation du
code
57
ces points forts de ce code nous ont finalement conduit
à utiliser ABAQUS pour le développement d'un modèle
numérique par éléments finis dans le cadre de cette
recherche.
4.2.3. Présentation du composites
étudiés
4.2.3.1. Objectif de la modélisation
La modélisation numérique par ABAQUS dans le
cadre de ce travail permettra d'une part de faire une comparaison des
résultats numériques par éléments finis et ceux
obtenus par MATLAB au chapitre 3 et d'autre part de valider les
résultats de MATLAB à l'aide d'un modèle d'une comparaison
avec les résultats expérimentaux contenu dans la
littérature.
4.2.3.2. Constituants des composites
étudié
Le composite étudié est identique à celui
présenté au §-3.2.
4.2.3.3. Eléments à modéliser
Au cours de l'analyse, nous aurons à étudier des
éléments rectangulaires de types poutre et plaque.
Tableau 4.20 : Présentation
géométrique des éléments à
modéliser
|
Plaque
|
Poutre
|
|
Illustrations
|
|
|
|
|
Caractéristiques
Géométriques
|
|
|
|
|
|
|
4.2.3.4. Les conditions aux limites à
étudier
Les différentes conditions aux limites à imposer
aux éléments sont :
? Plaque en appuis simples ; ? Poutre en appuis simples ; ?
Poutre encastrée-libre.
4.3. Modélisation par éléments
finis avec ABAQUS du comportement de la flèche d'un matériau
composite en vibrations libres transverses
4.3.1. Présentation du logiciel ABAQUS
Comme tous les logiciels d'éléments finis, la
résolution d'un problème de mécanique dans ABAQUS se fait
par une succession d'étapes faisant intervenir plusieurs modules. Les
différents modules sont :
- Le module Part : module servant à
définir la géométrie des entités du modèle.
Ces entités comprennent parfois des parties déformables et des
parties rigides. Son icône est :
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
58
- Le module Property : il permet de
définir les propriétés du matériau (des parties
déformables) et la masse des corps rigides si nécessaire. Pour
créer un matériau, il suffit de cliquer sur l'icône :
Ensuite, il faut créer une section afin d'y affecter
les propriétés du matériau à une entité du
maillage (a) et enfin, il faut affecter la section créée à
l'entité crée dans le module Part (b). Cela se fait au moyen des
icônes :
(a) (b)
- Le module Assembly : il s'agit de
créer une (voire plusieurs) instance(s) à partir des
entités que vous avez définies dans le module Part. Ces instances
seront celles que vous manipulerez par la suite dans le modèle. Il est
accessible par le bouton :
- Le module Step : il permet de
définir le type d'étude (statique, dynamique, etc.). Il est
accessible à partir du bouton :
- Le module Interaction : il permet de
définir les interactions entre différentes entités du
modèle,
ce qui peut prendre la forme d'un contact ou d'équations
de liaison entre degrés de liberté.

- Le module Load : il permet de
définir les différentes conditions d'étude comme : le
chargement (a), les conditions aux limites (b) et les vitesses (c).
(a) (b) (c)
- Le module Mesh : il permet de
définir les caractéristiques du maillage comme : le pas et le
type d'éléments(a) d'une part et d'exécuter le maillage
(b) d'autre part. ceci est exécutable par les icônes :
(a) (b)
- Le module Job : il permet le «
lancement » du calcul. Après avoir lancé le calcul, vous
pouvez suivre l'évolution du process en cliquant sur « Monitor
» : vous pouvez ainsi avoir en temps réel l'évolution
des incréments de chargement et apprécier la convergence des
calculs.
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
4.3.2. Comportement de la flèche des plaques par la
méthode des éléments finis et comparaison avec les
résultats du code développé.
4.3.2.1. Conditions aux limites : plaque en appuis
simples sur ses quatre côtés
Nombre d'élément de base : ; Types
d'éléments : STRI686
4.3.2.1.1.
Résultats
? Présentation graphique des
résultats
Mode1 : ; Mode 2 : ; ;
W 0 C ( Max )
W 0 A ( Max )
E w 0(max) ? w 0 A (
Max ) ? w 0 C (
Max )
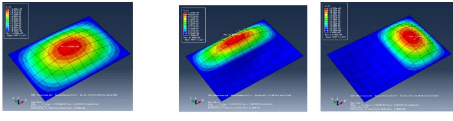
59
Mode 3 : ; ; Mode 4 : ; ;
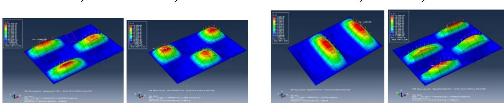
Figure 4.42: Présentation
graphique du comportement de la flèche sur un pli orthotrope
? Présentation numérique des
résultats
Le tableau ci-dessous, répertorie les
différentes valeurs des flèches maximales extraites dans le
calcul par éléments finis à l'aide de ABAQUS. Aussi, ces
résultats sont confrontés par ceux du code de calcul dans le but
de mettre en vue l'erreur relative qui existe entre les deux
méthodes.
Tableau 4.21 : Comparaison des
résultats obtenus par ABAQUS avec ceux du code
développé.
w ? w
0 A ( Max ) 0 C
( Max )
? 100
? x
w 0 A (
Max )
|
; ;
|
|
Modes
|
m
|
n
|
CODE (mm)
|
ABAQUS (mm)
|
Ecart (mm)
|
Ecart relatif i (%)
|
|
|
AAAA
|
AAAA
|
|
1
|
1
|
1
|
1.00060
|
1.06081
|
0.06021
|
5.67
|
|
2
|
1
|
2
|
1.00600
|
1.04100
|
0.035
|
3.36
|
|
2
|
1
|
1.00600
|
1.04100
|
0.035
|
3.36
|
|
3
|
2
|
3
|
1.00000
|
1.03208
|
0.03208
|
3.11
|
|
3
|
2
|
1.00000
|
1.03208
|
0.03208
|
3.11
|
|
4
|
1
|
4
|
1.00000
|
1.00000
|
0.000
|
0.00
|
6 STRI68 désigne le type d'élément
répondant aux hypothèses de Love-Kirchhoff
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
60
|
4
|
1
|
1.00000
|
1.00000
|
0.000
|
0.00
|
|
5
|
1
|
5
|
1.00000
|
1.00000
|
0.000
|
0.00
|
|
5
|
1
|
1.00000
|
1.00000
|
0.000
|
0.00
|
Le graphe ci-dessous rend plus visible l'écart relatif
entre les deux résultats.
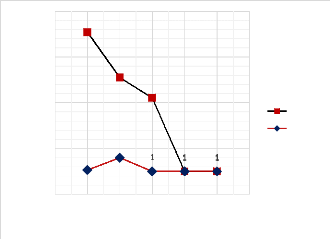
0 1 2 3 4 5 6
Modes
1,07
1,01
0,99
ABAQUS MATLAB
1,05
W0max
1,03
1,06081
1,041
1,03208
1,006
1,0006
Figure 4.43 : Présentation
graphique de l'écart relatif entre la flèche maximale
calculée par
MATLAB et celle calculée par ABAQUS.
Cette représentation graphique nous montre dans le sens
vertical la dispersion des deux courbes. Cette dispersion est
considérable pour les trois premiers modes d'excitations.
4.3.2.1.2. Explication du phénomène de
dispersion
Le phénomène de dispersion peut être
lié à une erreur du code de calcul développé ou une
erreur
de configuration des paramètres de maillage de la
structure. Cette dernière nous poussera à analyser l'influence du
nombre d'éléments (pas) sur le comportement de la flèche
d'une plaque.
4.3.2.1.3. Influence du nombre
d'éléments
Pour la même plaque, nous reprenons le test sous ABAQUS en
faisant varier le nombre d'éléments.
Tableau 4.22 : Comportement de la
flèche d'une plaque AAAA en fonction du nombre
d'éléments.
|
Modes
|
m
|
n
|
W0max ABAQUS (mm)
|
W0max
MATLAB
(mm)
|
|
5
éléments
|
20
éléments
|
30
éléments
|
80
éléments
|
100
éléments
|
1000
éléments
|
|
1
|
1
|
1
|
1.05092
|
1.13572
|
1.06081
|
1.00660
|
1.00010
|
1.000001
|
1.00060
|
|
2
|
1
|
2
|
1.14216
|
1.13804
|
1.04100
|
1.00440
|
1.00001
|
1.00000
|
1.00600
|
|
2
|
1
|
1.14216
|
1.13804
|
1.04100
|
1.00440
|
1.00001
|
1.00000
|
1.00600
|
|
3
|
2
|
3
|
1.13572
|
1.13572
|
1.03208
|
1.00208
|
1.00000
|
1.00000
|
1.00000
|
|
3
|
2
|
1.13572
|
1.13572
|
1.03208
|
1.00208
|
1.00000
|
1.00000
|
1.00000
|
|
4
|
1
|
4
|
1.13572
|
1.12100
|
1.00000
|
1.00000
|
1.00000
|
1.00000
|
1.00000
|
|
4
|
1
|
1.13572
|
1.12100
|
1.00000
|
1.00000
|
1.00000
|
1.00000
|
1.00000
|
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
61
5
|
1
|
5
|
1.13572
|
1.12100
|
1.00000
|
1.00000
|
1.00000
|
1.00000
|
1.00000
|
|
5
|
1
|
1.13572
|
1.12100
|
1.00000
|
1.00000
|
1.00000
|
1.00000
|
1.00000
|
L'influence du type d'élément sur le comportement
de la flèche est explicitée par le graphe ci-dessous.
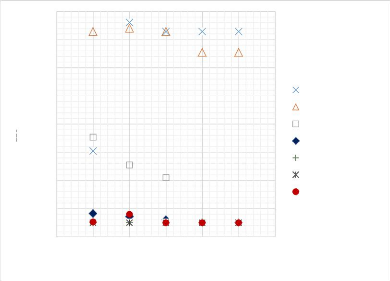
W0max
m ? 2 n ? 3
0,99
1,15
1,13
1,11
1,09
1,07
1,05
1,03
1,01
0 1 2 3 4 5 6
Modes
5 élts
20 élts 30 élts 80 élts 100
élts 1000 élts
W0max MATLAB
Figure 4.44 : Influence du
nombre d'éléments sur le comportement de la flèche d'une
plaque en appuis simples.
Effectivement, l'influence du nombre d'éléments
est considérable sur le comportement de la flèche. Donc, les
résultats deviennent acceptables à partir de 100
éléments comparativement au code de calcul
développé.
? Présentation graphique des résultats
pour un maillage de 100 éléments
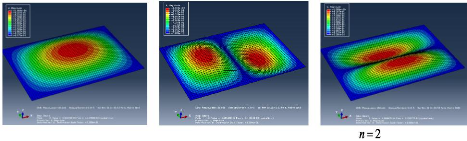
Mode 3 : ; ;
Mode 1 : ; Mode 2 : ; ;
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
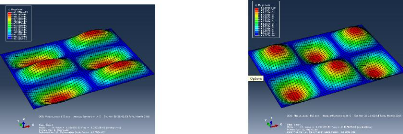
62
Figure 4.45 : Présentation
graphique du comportement de la flèche sur une plaque en
appuis
simples sur ses 4 extrémités.
4.3.2.2. Conditions aux limites : poutre
encastrée à une extrémité et libre sur l'autre.
Nombre d'élément de base : ; Types
d'éléments : STRI68
4.3.2.2.1. Résultats
? Présentation graphique des
résultats
Mode1 : Mode 2 : Mode 3
:
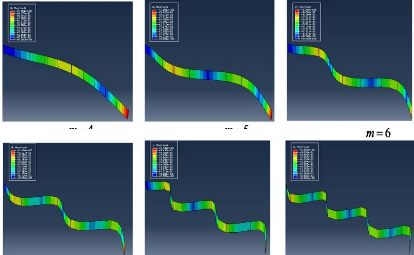
Mode 4 : Mode 5 : Mode
5 :
Figure 4.46 : Présentation
graphique du comportement de la flèche sur une poutre EL
? Présentation numérique des
résultats
Le tableau ci-dessous, établie la confrontation des
résultats des flèches maximales obtenus au
cours du calcul par éléments finis à
l'aide de ABAQUS avec ceux du code développé dans Matlab. Le but
est de valider le code développé dans Matlab au moyen de l'erreur
relative qui existe entre les deux méthodes.
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
63
Tableau 4.23 : Comparaison des
résultats obtenus par ABAQUS avec ceux du code
développé.
|
; ;
|
|
Modes
|
m
|
n
|
CODE (mm)
|
ABAQUS (mm)
|
Ecart (mm)
|
Ecart relatif i (%)
|
|
|
EL
|
EL
|
|
1
|
1
|
1
|
1.5201
|
1.50153
|
-0.01857
|
-0.012
|
|
2
|
1
|
2
|
2.0369
|
1.99519
|
-0.04171
|
-0.021
|
|
2
|
1
|
1.9984
|
1.84315
|
-0.155225
|
-0.084
|
|
3
|
2
|
3
|
2.0001
|
1.96815
|
-0.03195
|
-0.016
|
|
3
|
2
|
2.0000
|
1.96009
|
-0.03991
|
-0.020
|
|
4
|
1
|
4
|
2.0000
|
1.96009
|
-0.03991
|
-0.020
|
|
4
|
1
|
2.0000
|
1.96009
|
-0.03991
|
-0.020
|
|
5
|
1
|
5
|
2.0000
|
1.96009
|
-0.03991
|
-0.020
|
|
5
|
1
|
2.0000
|
1.96009
|
-0.03991
|
-0.020
|
Le graphe ci-dessous rend plus visible l'écart relatif
entre les deux résultats.
ne ? 30
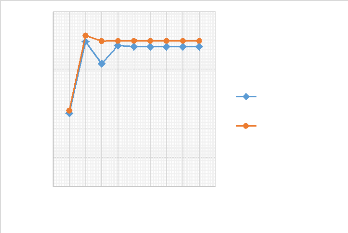
W0max (mm)
2,2
1,8
1,6
1,4
1,2
2
1
0 1 2 3 4 5 6 7 8 9 10 Mode "m"
W0max ABAQUS (mm)
W0max CODE (mm)
m ? 1
Figure 4.47 : Présentation
graphique du comportement de la flèche sur un pli orthotrope en
appuis
simples sur ses 4 extrémités.
Cette représentation graphique nous montre dans le sens
vertical la dispersion des deux
courbes. Cette dispersion est considérable entre le mode 2
et 3. La dispersion importante au mode
3 soit un écart relatif de 0,084.
4.3.2.2.2. Conditions aux limites : poutre en appuis
simples sur ses deux extrémités.
Nombre d'élément de base : ; Types
d'éléments : STRI68
4.3.2.2.3. Résultats
? Présentation graphique des
résultats
Mode1 : Mode 2 : Mode 3
:
64
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
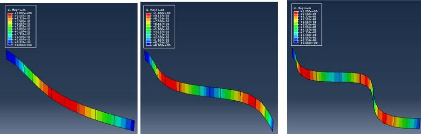
Mode 4 : Mode 5 : Mode
5 :
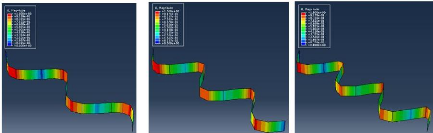
Figure 4.48 : Présentation
graphique du comportement de la flèche sur une poutre EL 4.4.
Validation du code de calcul
Les études faites au chapitre 2 montrent que la
flèche est exprimée en fonction de la fréquence angulaire
et du temps. Pour valider le code de calcul développé, il nous
suffit de :
· Considérer les travaux de M. Assarar, A. El Mahi
& J.-M. Berthelot ;
· Considérer les résultats des
fréquences obtenus expérimentalement dans ces travaux ;
h ? 15 mm a ? 560
mm
· Entrer les caractéristiques du même
composite dans le code de calcul développé dans le cadre de cette
recherche ;
· Extraire les résultats des fréquences ;
· Comparer les deux résultats ;
· Commenter la comparaison puis valider le code de
calcul.
4.4.1. Présentation des travaux de M. Assarar, A.
El Mahi & J.-M. Berthelot [13]
4.4.2. Mise en situation des travaux
Les travaux de M. Assarar, A. El Mahi & J.-M. Berthelot
porte sur le thème « Analyse de la réponse dynamique des
structures en matériaux composites. » dans le cadre du
19ème Congrès Français de Mécanique tenu
à Marseille, les 24 et 28 août 2009.
4.4.2.1. Présentation du composite et
description de l'étude
Le composite est une structure stratifié bidirectionnel
du type renforcé par des
fibres de verre, d'épaisseur et de longueur .
65
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
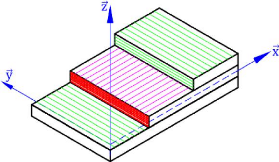
Figure 4.49 : stratifié
croisé symétrique considéré pour
l'étude
L'étude expérimentale a été
menée sur des structures encastrées suivant une section
carrée
de . La structure a été excitées en un
point proche de l'encastrement à l'aide d'un
marteau d'impact tel que le montre la figure ci-dessous. La
réponse a été relevées suivants plusieurs points de
manière à détecter tous les modes de vibrations
situés dans la bande passante [0, 100 Hz].
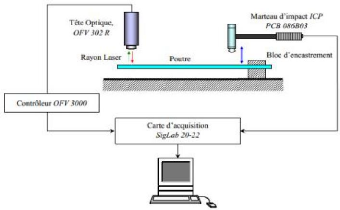
Figure 4.50: Dispositif
expérimental utilisé [13].
4.4.2.2. Résultats de l'étude
Les résultats obtenus dans cette recherche sont
repertoriés dans le tableau ci-dessous.
Tableau 4.24: Résultats des
fréquences calculées par les travaux expérimentaux de M.
Assarar, A. El Mahi & J.-M. Berthelot.
Modes
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
Fréquences
|
|
|
|
|
|
|
|
|
|
|
Assarar (Hz)
|
107
|
153
|
215
|
341
|
345
|
457
|
471
|
475
|
538
|
556
|
|
4.4.3. Calcul des fréquences avec le code de
calcul
En reportant les caractéristiques de cette structure
stratifiée dans le code de calcul développé nous obtenons
les résultats du tableau ci-dessous.
66
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
Tableau 4.25: Résultats des
fréquences calculées par le code développé
Modes
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
Fréquences
|
105.46
|
150.12
|
213.24
|
339.26
|
343.32
|
455.64
|
469.95
|
473.15
|
536.41
|
554.38
|
MATLAB (Hz)
|
|
|
|
|
|
|
|
|
|
|
|
4.4.4. Comparaison des deux résultats
La comparaison est présentée dans un tableau et
une figure. Cette comparaison se fait à partir de l'écart des
fréquences obtenu en faisant la différence entre la
fréquence des travaux et la fréquence du code. Elle est aussi
établie par l'écart relatif dont l'expression est
explicitée dans le tableau.
Tableau de comparaison
Tableau 4.26 : Comparaison des
fréquences propres calculées par le code de calcul
développé avec celles obtenues par des travaux
expérimentaux de M. Assarar, A. El Mahi & J.-M. Berthelot.
a = 150 mm ; b = 560 mm et h= 150 mm
|
Modes
|
Fréquences Fréquences
Matlab (Hz) Assarar (Hz)
|
Stratifié
ELE.f=fTR-fABAQUsA=fx100
[0/90]STR
|
Ecart (HZ)fTR-fAaAQUs
Ecart relatif 0 (%)
|
|
|
|
1
|
105.46
|
107
|
1.57
|
0.0144
|
2
|
150.12
|
153
|
2.88
|
0.0188
|
3
|
213.24
|
215
|
1.76
|
0.0082
|
4
|
339.26
|
341
|
1.74
|
0.0051
|
5
|
343.32
|
345
|
1.68
|
0.0048
|
6
|
455.64
|
457
|
1.36
|
0.0029
|
7
|
469.95
|
471
|
1.05
|
0.0022
|
8
|
473.15
|
475
|
1.85
|
0.0038
|
9
|
536.41
|
538
|
1.59
|
0.0029
|
10
|
554.38
|
556
|
1.62
|
0.0011
|
|
Graphe de comparaison
Le graphe de comparaison présente les courbes des
fréquences propres obtenues par les deux résultats en fonction
des modes d'excitation.
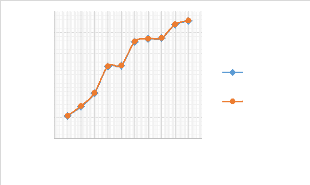
f (Hz)
200
500
400
300
600
100
0
0 1 2 3 4 5 6 7 8 9 10 11
Mode "m"
Fréquences Matlab (Hz)
Fréquences Assarar (Hz)
Figure 4.51: Dispositif
expérimental utilisé.
67
Chapitre 4 : Simulation
numérique sous Abaqus du comportement de la flèche d'une
structure composite et validation du code
Ecart relatif moyen
Au terme de ce chapitre, force est de constater que
l'objectif poursuivi était de confronter les résultats du code de
calcul développé au chapitre 3 par des résultats obtenus
grâce à un logiciel intégrant les éléments
finis et à partir des résultats tirés de la
littérature. Cette comparaison, met en exergue une petite erreur de
calculs entre les deux résultats. Il est donc clair que les
résultats générés dans le code de calcul sont
correct avec un écart relatif moyen de 0.6%. En effet, les travaux
expérimentaux de M. Assarar, A. El Mahi & J.-M. Berthelot
avaient pour objectif de montrer que dans le cas d'une étude
dynamique l'on peut s'affranchir d'une analyse expérimentale plus longue
et difficile à mettre en place.
CHAPITRE 5 : MISE EN PLACE D'UN LOGICIEL DE CALCUL DE
LA FLECHE D'UN COMPOSITE ORTHOTROPE ET CAS PRATIQUE
Chapitre 5 :
MISE EN PLACE D'UN LOGICIEL DE CALCUL DE LA FLECHE
D'UN COMPOSITE ORTHOTROPE ET CAS PRATIQUE
De nos jours, l'informatique ou « l'autoroute de
l'information » est devenu un moyen de communication efficace et
instantané dans le monde. L'information se fait traiter et
véhiculer au moyen des logiciels développés selon le
besoin. Seulement, la mise sur pieds d'un logiciel est une tâche complexe
qui nécessite un maximum de dextérité, car, le
développeur doit répertorier l'ensemble des fonctions principales
et contraintes du logiciel. Dans le cadre de ce travail, nous mettons sur pieds
un outil informatique simple par sa configuration et son utilisation
destiné à effectuer une étude de comportement de la
flèche des matériaux composites soumis aux vibrations transverses
et répondant aux considérations de la flexion. Pour ce faire,
nous allons d'abord procéder au choix de l'outil de
développement, ensuite définir les attributs du logiciel et enfin
écrire le code du logiciel. Par ailleurs, nous effectuerons dans ce
même chapitre, une application visant à optimiser la poutre
support d'un panneau de signalisation et le logiciel développé
nous permettra d'effectuer les différents calculs.
Chapitre 5 : Mise en place d'un logiciel de calcul de la
flèche d'un composite orthotrope et cas pratique
5.1. Mise en place d'un logiciel de calcul de la
flèche d'un composite
5.1.1. Objectif de la conception du logiciel
En complément de l'introduction, l'objectif de cette
conception est d'implémenter le code de calcul développé
au chapitre 2 et validé aux chapitres 5 et 6 dans une interface
graphique.
5.1.2. Choix de l'outils de développement
Le processus de conception des logiciels étant
très complexes, il est nécessaire de choisir un outil de
développement puissant, efficace, flexible et simple à manipuler.
Parmi la moultitude d'outils de développement comme Scilab, Matlab et
Labview nous retiendrons Matlab. En pratique, sous Matlab, toutes les actions
doivent être intégralement programmées dans le fichier
« M-file 7». Ceci offre au programmeur une
flexibilité et une liberté au cours du paramétrage de
l'interface graphique.
5.1.3. Présentation des attributs du logiciel
Nom, fonction principale et processus de calcul de logiciel
constituent les attributs du
logiciel.
5.1.3.1. Nom du logiciel
Le sigle représente le nom du logiciel
développé dans le cadre de cette recherche.
En effet, signifie : ; ; ; .
5.1.3.2. Architecture du
logiciel
L'architecture donne le processus d'exécution des
tâches que doivent mener le logiciel. Aussi les utilisateurs doivent le
respecter pour effectuer une analyse du comportement de la flèche.
69
7 Extension du fichier script de Matlab
70
Chapitre 5 : Mise en place d'un logiciel de calcul de la
flèche d'un composite orthotrope et cas pratique
Figure 4.52 : Différentes
étapes à suivre pour analyser le comportement de la flèche
5.1.3.3. ` Fonction principale du logiciel
Le logiciel développé sur 3664 lignes de code
doit permettre à son utilisateur d'effectuer simplement les
études de comportement d'un matériau composite soumis à
des vibrations libres, sollicité au flambement et en flexion.
71
Chapitre 5 : Mise en place d'un logiciel de calcul de la
flèche d'un composite orthotrope et cas pratique
A cette fonction principale, il en ressort des fonctions
contraintes suivantes :
· Offrir une variété des
éléments constitutifs du composite ;
· Entrer les caractéristiques intrinsèques
des constituants ;
· Assembler ou homogénéiser un
matériau composite par la méthode basée sur les
modèles à « bornes » de VOIGT et REUSS ;
· Calcul des différents modules de
l'ingénieur (EL, ET, etc.) ;
· Calcul de la matrice constitutive de la structure ;
· Vérification et validation des différents
modules de l'ingénieur ;
· Entrer les caractéristiques
géométriques et calculer les caractéristiques
mécaniques ;
· Définir les conditions aux limites de la structure
;
· Afficher les résultats (graphes de comportement de
la flèche et valeur de la flèche maximale) ;
· Générer le rapport sur une feuille de
calcul.
5.1.4. Petit tutoriel de
(1) Démarrage et écran d'accueil du
logiciel i-VAC
Cliquer sur i-VAC.exe pour lancer
l'application. Voici l'écran de démarrage et l'interface
d'accueil du logiciel :

Figure 4.53 : Aperçu de
l'écran de démarrage et d'accueil du logiciel
i-VAC. Cliquer sur le « logo
» pour lancer une étude par l'onglet «
MATERIAU »
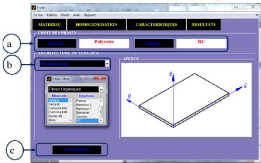
(2) Onglet MATERIAU
(a) Choisir les constituants du composite ;
(b) Choisir le type de structure ;
(c) Cliquer sur « continuer
» pour passer à l'onglet «
CARACTERISTIQUES ».
Figure 4.54 : Aperçu de
l'interface de l'ongle MATERIAU du logiciel
i-VAC
(3) Onglet HOMOGENEISATION
Chapitre 5 : Mise en place d'un logiciel de calcul de la
flèche d'un composite orthotrope et cas pratique
(a) Entrer les caractéristiques intrinsèques
des constituants du composite, puis cliquer sur «
homogénéisation » ;
(b) Confirmer le nombre de couche, puis cliquer sur «
calculer » pour afficher les valeurs
des coefficients de rigidité ;
(c) Cliquer sur « continuer
» pour passer à l'onglet «
CARACTERISTIQUES »
|
|
|
Figure 4.55 : Aperçu de de
l'interface de l'ongle
|
(4) Onglet CARACTERISTIQUES HOMOGENEISATION
du logiciel i-VAC
(a) Choisir « Poutre » comme «
élément de la structure »
;
(b) choisir « Rectangulaire » comme
« type de section » puis remplir
les valeurs en respectant les côtes visibles dans la fenêtre
aperçu ;
(c)
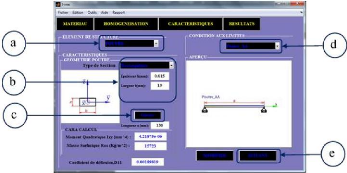
Cliquer sur « Générer »
pour effectuer et afficher les résultats de l'étude ;
(d) Choisir les conditions aux limites, pour notre étude
prendre « Poutre_AA » ;
(e) Cliquer sur « Suivant » pour
passer à l'onglet
« RESULTATS »
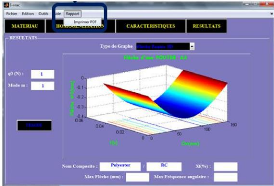
(5) Onglet RESULTATS
Figure 4.57 : Aperçu de de
l'interface de l'ongle RESULTATS du logiciel
i-VAC.
Figure 4.56 : Aperçu de
de l'interface de l'ongle CARACTERISTIQUES du logiciel
i-VAC
(a)
72
Choisir le type de graphe ;
(b) Entrer les valeurs q0 en Newtown et le rang
du mode que vous souhaitez visualiser ;
(c) Cliquer sur le bouton « TRACER »
pour afficher le graphe d'étude ;
(d) Impression du rapport :
Menu Rapport >> cliquer sur imprimer rapport ceci imprimera sur format
.pdf votre feuille de calcul.
Chapitre 5 : Mise en place d'un logiciel de calcul de la
flèche d'un composite orthotrope et cas pratique
5.2. Cas pratique : optimisation du support d'un
panneau de signalisation
5.2.1. Mise en situation
Un panneau de signalisation routière est un dispositif
sur lequel est marqué un ou plusieurs éléments du signal
routier. Fixé sur un support qui est lui-même planter dans le sol
dans un massif de fondation, le panneau de signalisation est placé sur
le côté de la route et permet de :
? Rendre plus sûre la circulation routière en
alertant les usagers des éventuels obstacles qu'ils peuvent rencontrer
;
? Faciliter la circulation en indiquant les directions à
suivre ;
? Respecter ou indiquer les différentes prescriptions
particulières de police ;
? Donner des indications relatives à l'usage de la
route.

Figure 4.58 : Images de
différents panneaux de signalisation.
[23]
5.2.2. Problématique de l'optimisation
Les supports des panneaux de signalisation routière
sont généralement en matériau homogène comme
l'acier galvanisé et l'aluminium dont l'extraction du minerai est encore
un mystère pour l'industrie camerounaise, de plus, ces matériaux
rendent le dispositif lourd. D'où la nécessité de mener
une étude sur l'optimisation de ces matériaux homogènes
par un matériau local en particulier ceux développés par
les différents laboratoires de recherches de l'ENSET de Douala. Cette
étude vient surtout mettre en application le code de calcul
développé dans le cadre de cette recherche.
Pour le concepteur, le support doit assurer la tenue aux
sollicitations mécaniques et climatiques. Ainsi, il doit pouvoir
résister aux différentes forces exercées par les vents
soufflant sur le site de l'implantation, afin de ne pas se déformer et
de ne pas s'arracher ou rompre.
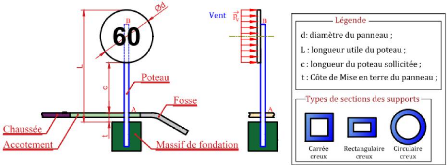
Figure 5.59 : Schéma
annoté d'un panneau de signalisation routière
73


Chapitre 5 : Mise en place d'un logiciel de calcul de
la flèche d'un composite orthotrope et cas pratique
5.2.3. Objectif de l'optimisation
L'objectif de cette étude est de montrer que les
matériaux développés aux différents laboratoires
du Génie Mécanique peuvent s'intégrer dans
la conception et la fabrication des supports des panneaux
de signalisation routière. Le paramètre à
évaluer pour définir le type de support est le moment
fléchissant
(voir Annexe 6) dû à l'effort du vent, pour cela,
nous allons :
- Isoler le système (poteau-massif) ;
- Faire le bilan des actions mécaniques
appliquées à ce système ;
- Calculer le moment de flexion maximale et
déterminer le support normaliser
correspondant ;
Qv . z -
Evaluer la flèche du système.
pv . z
Du point de vue mécanique, la force exercées par
le vent engendre des vibrations puis sollicitent
en flexion et en torsion le support.
5.2.4. Etude vibratoire du système
5.2.4.1. Hypothèses de l'étude et
données
Dans cette étude, nous admettons que :
? La côte de mise en terre est de 20 Cm ;
? La pression dynamique de base est prise à 130
daN/m2 ;
? Pour nos applications numériques nous prendrons : , ;
;
? Les surfaces réelles des panneaux sont prises en compte
: ;
? Le moment de torsion est négligé.
Considérons le système ci-contre
représentant le support d'un panneau de signalisation pour limitation de
vitesse, de gamme normale implanté dans la ville de Douala. Le
problème est assimilable à celui d'une poutre encastrée
à une extrémité et libre sur l'autre. Cette étude
ne traite que l'aspect mécanique du problème, toutefois nous ne
mentionnons pas les traitements qu'il faut faire subir à la pièce
pour qu'elle résiste mieux aux conditions climatiques et au contact avec
le massif de fondation.
5.2.4.2. Bilan des actions mécaniques
exercées sur le système
Le problème étant celui d'une poutre
encastrée-libre soumise à une force résultante
( sur son extrémité libre) de la pression dynamique
sur le panneau de signalisation.
Le système est soumis à :
? ou : la force ou la pression dynamique due au vent
;
x x ? ? a 0
w (0) ? 0 w '(0) ?
0
w ''( a ) ? 0 w
'''( a ) ? 0
Q . z ? p v
74
MA
? : le moment d'encastrement en A.
Les conditions aux limites satisfont les équations :
- En A, : et (5.1)
- En B, : , et .
(5.2)
=
m
Avec :
(5.12)
75
Chapitre 5 : Mise en place d'un logiciel de calcul de
la flèche d'un composite orthotrope et cas pratique
, y , , y ,
? 0
5.2.4.3. Champ de déplacement
cinématiquement admissible du système La plaque
étant sollicitée en flexion plane simple, il vient :
(5.3)
5.2.4.4. Expression du moment fléchissant
En effectuant une coupe fictive comme présentée
à la figure 5.53, nous avons l'équation d'équilibre
statique suivante :
(5.4)
Or : (5.5)
D'où : (5.6)
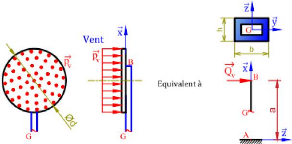
|
Figure 5.60 : Schéma
annoté d'un panneau de signalisation routière Application
à un panneau circulaire
Nous avons :
|
(5.7)
|
AN : (5.8)
(5.9)
Choix de la section : d'après le tableau
en annexe 5, la section encastrée correspond à la
section critique
et la valeur trouvée nous permet de choisir une poutre
à section rectangulaire type SD1, de
w x t ? ? D ? t
? x
0( , ) m cos m m
( )
. Cette poutre est réalisée sur nos route en
acier galvanisé.
5.2.4.5. Flèche maximale du système
? Pour le matériau homogène isotrope en
acier galvanisé
Pour un matériau homogène isotrope, le comportement
élastique est décrit par le module
d'Young et le coefficient de Poisson .
Ph
11 12(1 )
? v
Le coefficient de la matrice de rigidité en flexion est
:
(5.10)
( )2 2
m - 0.5 ?
Les résultats obtenus §2.2.3 deviennent : (5.11)
m
76
Chapitre 5 : Mise en place d'un logiciel de calcul de
la flèche d'un composite orthotrope et cas pratique
Le matériau considéré a pour
caractéristiques : ; et
? Pour le composite polyester/RC
Les résultats seront obtenus en introduisant les
valeurs correspondantes dans le logiciel i-VAC. A cet
effet, nous avons un composite polyester/RC avec un taux de fibres de 35% de
module d'Young
de .
5.2.4.6. Présentation et comparaison avec la
flèche maximale
|
Modes
|
1
|
2
|
3
|
4
|
5
|
6
|
|
Polyester/RC
|
|
4,0731
|
4,4403
|
4,4410
|
4,4410
|
4,4410
|
4,4410
|
|
1,1828
|
4,7313
|
10,6455
|
18,9253
|
29,5708
|
42,5819
|
|
Acier galvanisé
|
|
4,0145
|
4,3763
|
4,3771
|
4,3771
|
4,3771
|
4,3771
|
|
228,96
|
915,48
|
2,06e+3
|
3,66e+3
|
5,72e+3
|
8,24e+3
|
|
Ecart relatif :
|
1,4387
|
1,4413
|
1,4388
|
1,4388
|
1,4388
|
1,4388
|
|
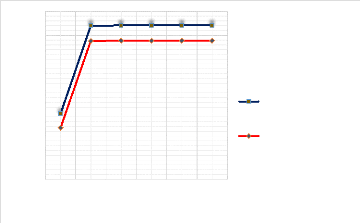
W0Max
4,5
4,4
4,3
4,2
4,1
3,9
3,8
4
1 2 3 4 5 6
Modes
W0comp (.10E-15 mm)
W0acier (.10E-15 mm)
Le support type SD1 en acier galvanisé nous donne une
flèche de 4,0145.10-15 mm au mode fondamental, et la
même étude effectuée sur un composite polyester/RC
renforcé à 35% de fibres, de
module d'Young de nous donne une flèche de
4,0731.10-15 mm au même mode soit un écart
relatif de 1,4387%. Donc ce matériau composite
est capable de substituer l'acier galvanisé en offrant un plus, la
légèreté lors de sa mise en place et le caractère
biodégradable.
Parvenu au terme de ce chapitre dont l'objectif était
de mettre sur pieds un logiciel d'étude du comportement de la
flèche des matériaux composites et sous diverses conditions
limites force est de constater que le logiciel fonctionne normalement. Pour y
parvenir nous avons écrit 3664 lignes de code dans le logiciel Matlab.
Aussi, un cas pratique a été étudié afin de montrer
la portée scientifique de ce thème.
77
CONCLUSION GENERALE : BILAN ET PERSPECTIVES
La thématique abordée dans ces travaux est
l'étude du comportement de la flèche d'un matériau
composite en vibration et simulation sous Matlab. La revue bibliographique
présentée au chapitre 1, a montrée que les travaux en
vibration des composites sont basés sur la théorie classique des
stratifiés et la flèche est l'un des paramètres des
équations qui en découlent mais, dépend du type de
sollicitation et du type de structure. Ceci nous a permis de restreindre notre
étude sur les structures de types Love-Kirchhoff et Euler-Bernoulli
considérées comme des plis unidirectionnels ou orthotropes de
0° et 90°, ou stratifié croisé symétrique d'une
part et antisymétrique d'autre part. Ainsi, l'objectif visé a
été de formuler l'équation de comportement de la
flèche de telles structures et d'effectuer une simulation
numérique sous Matlab. Les travaux menés pour atteindre cet
objectif de recherche ont été développés
principalement autour de trois chapitres traités au moyen des
considérations posées au chapitre 1. Au chapitre 2,
l'équation de comportement de la flèche est obtenue en
résolvant par la méthode de séparation des variables et la
méthode de Rayleigh-Ritz l'équation différentielle de
mouvement transversal d'une structure stratifiée en l'absence des
charges transverses à un instant t quelconque. La flèche obtenue
dépend des caractéristiques mécaniques d'un
matériau, de la fréquence angulaire, du temps et des conditions
aux limites. Face à cette dépendance, le logiciel Matlab au
chapitre 3 nous a permis de visualiser et de quantifier la valeur maximale de
la flèche en prenant un composite à matrice polyester
renforcé par des fibres de RC. Au chapitre 4, les résultats
développés par le code de calcul s'accordent aux résultats
de Abaqus avec un écart relatif moyen de 0,026625%. Ces mêmes
résultats, s'accordent avec un écart relatif moyen de 0,06% aux
résultats de la littérature provenant des travaux sur une
structure stratifiée [0/90]s.
Il était aussi question dans ce même travail de
valoriser les produits locaux en intégrant les matériaux
composites développés au Laboratoire de Mécanique et
Productique de l'UFD dans la loi de comportement de la flèche. A cet
effet, nous espérons que ce travail, permettra de retirer une des
épines dans le domaine des vibrations des composites. Cependant, les
travaux de ce mémoire ouvrent la voie à de nombreux axes de
recherches :
Du point de vue théorique et expérimental, les
améliorations ci-dessous sont envisageables :
- La formulation de l'équation de
comportement s'est faite avec des poutres et plaques. Il serait aussi judicieux
de formuler ce même comportement pour des éléments de type
coque ;
- Cette même formulation s'est faite
par une méthode analytique directe, il serait donc commode de formuler
analytiquement un modèle éléments finis ou
différences finis du comportement de la flèche en
intégrant la température ;
- Identifier le renforcement maximal des
fibres dans un composite pour optimiser sa flèche ;
- Vue la nature purement théorique des
résultats présentés ici, il serait judicieux de mener une
étude expérimentale tropicalisée. C'est pourquoi, nous
proposons qu'une machine à essais dynamiques capable d'évaluer la
flèche d`une structure composite sollicitée en vibration
mécanique de flexion soit mise à disposition au sein du
Laboratoire.
ANNEXES
Annexes 1 : Coefficients intervenants dans le calcul
des fréquences propres
Tableau A1.27: Coefficients
intervenants dans le calcul des fréquences propres d'un composite
orthotrope (E : côté encastré ; S : côté en
appui simple). [3]
Conditions aux limites

1
1
2,3,4,...
2,3,4,...
1 2,3,4,... 1
2,3,4,...
4.730
4.730
(
m+0.5) (
m+0.5)
4.730
Tr
Tr
( )
n + 0.5
4.730
Tr (
n+0.5)
Tr
151.3
12.3 c 3( c3-2)
12.3 c1 (c1 - 2 )
c1 (c1 -
2)c3(c3-2)
Annexes 2 : Caractéristiques des fibres
intégrées dans le logiciel i-VAC Tableau A2.28
: caractéristiques mécaniques et masse
volumique de quelques fibres [13]
|
Types de fibres
|
Module
Ef
[GPa]
|
Contrainte
à la rupture
0
fu [MPa]
|
Masse
volumique
p [kg/m3]
|
Module
spécifique
E f/p [MN.m/Kg]
|
Module de
cisaillement
G
f[GPa]
|
Coefficient
de poisson
o f
|
Diamètre
offim
[lu l
|
|
Verre E
|
72.5
|
3500
|
2540
|
28.5
|
29.9
|
0.2
|
16
|
|
Verre R
|
85.5
|
4600
|
2480
|
34.5
|
35.2
|
0.25
|
10
|
|
Carbone :
|
|
|
|
|
|
|
|
|
?Haut module ;
|
390
|
2100
|
1900
|
205
|
142.9
|
0.35
|
6 à 7
|
|
?Haute résistance
|
240
|
3500
|
1850
|
130
|
97.7
|
0.3
|
6 à 7
|
|
Aramide (Kevlar)
|
130
|
2800
|
1500
|
87
|
49.3
|
0.37
|
12
|
|
Bore
|
385
|
2800
|
2360
|
146
|
/
|
/
|
/
|
Tableau A2.29 :
Caractéristiques mécaniques de quelques fibres
végétales extraites au Département Génie
Mécanique de l'ENSET de Douala.
|
Types de fibres
|
Masse volumique p [kg/m3]
|
Taux
d'absorption [%]
|
Module
d'Young
Ef [GPa]
|
Résistance élastique Ref
[MPa]
|
Résistance maximale
RMaxf
[MPa]
|
Allongement à la rupture [%]
|
Réf.
|
|
Baobab
|
1358
|
64.20
|
8.7 - 18.3
|
-
|
150 - 275
|
1.35 - 3.85
|
[15]
|
Gombo
|
1291-
1484
|
56.21
|
18.44 -
28.48
|
-
|
270.56 -
494.43
|
1.83 - 2.17
|
[16]
|
|
|
Palmier Doum
|
1600
|
63.95
|
14.668 -
30.118
|
102- 910
|
55- 1062
|
0.62 - 4.82
|
[17]
|
Kenaf
|
-
|
-
|
6.024 -
6.250
|
61- 90
|
122 - 150
|
2.3 - 2.84
|
[18]
|
Bambou V Bambou F
|
364.66
364.66
|
-
-
|
0.49- 1.63
0.49- 1.63
|
9
9
|
13
13
|
0.022
0.022
|
[19]
[20]
|
Palme
|
265.63 -
278.66
|
64.95- 71.72
|
4.33 -
8.52
|
-
|
78.23
|
2.5
|
[20]
|
Bananier
|
889 à 1055
|
77.47
|
0.179 -
2.836
|
1.72-
18.67
|
7.19 -
246.67
|
1.3 - 10.8
|
[21]
|
|
|
Sisal
|
1300-1450
|
-
|
9 - 22
|
-
|
80 - 840
|
1.6 - 2
|
[1]
|
|
RC
|
947
|
-
|
2.3 - 17
|
-
|
150 - 1738
|
10.9 - 53
|
[1]
|
Annexes 3 : Les caractéristiques des
matrices intégrées dans le logiciel i-VAC Tableau A3.30
: Caractéristiques des matrices.
|
Types de
matrices
|
Module
Em [GPa]
|
Module
de
cisaillement
Gm[GPa]
|
Coefficient
de poisson
Vm
|
Masse
volumique
Pm
[kg/m3]
|
Contrainte à la
rupture en
traction
0.????
[MPa]
|
Déformation à la
rupture
en
traction E?? ?? [%]
|
|
Résine thermodurcissable
|
|
Polyester
|
2,8 à 3,6
|
1.40
|
0.4
|
1200
|
50 à 85
|
2 à 5
|
|
Phénolique
|
3 à 5
|
1.10
|
0.4
|
1300
|
40
|
2,5
|
|
Epoxyde
|
3 à 5
|
1.33
|
0.3
|
1200
|
60 à 80
|
2 à 5
|
|
Polyimide
|
4 à19
|
1.1
|
0.35
|
1400
|
70
|
1
|
|
Résine thermoplastique
|
|
Polyamide
|
1,2 à 2,5
|
0.81 à 1.7
|
0.35
|
1140
|
60 à 85
|
200
|
|
Polypropylène
|
1,1 à 1,4
|
0.77 à 0.98
|
0.4
|
1200
|
20 à 35
|
20 à 400
|
Annexes 4 : Classe des moments de flexion
normalisées
Les désignations SP, SD1, SD2 et SD3 représentent
les types de supports. ? Supports types : SP, SD1 et SD2
Ils désignent l'ensemble des supports à section
rectangulaire, carrée ou circulaire. Les dimensions standards sont :
Tableau A4.31 :
caractéristiques géométriques des
supports types : SP (a) ; SD1 (b) et SD2 (c) [22]

79
(a) (b) (c)
? Support type SD3
Ils désignent l'ensemble des supports en profilés
normalisés I, de type IPN dont les dimensions sont normalisées et
indépendantes des fournisseurs.
Tableau A4.32 :
caractéristiques géométriques des supports type
SD3

80
Pour chaque classe de moment, les fabricants de panneaux ont
conçu, pour chaque catégorie de panneau (SP, SD1 ou SD2), un
support résistant au moment maximal de la classe.
Tableau A4.33 : Les
différentes classes des moments de flexion normalisées
|
Supports de signalisation directionnelle
|
Massifs de fondation
|
|
Moments en
|
SP - SD1
|
SD2
|
Support I
|
Catégorie A
|
Catégorie B
|
|
|
|
/
|
|
|
|
|
|
I
|
|
|
|
|
|
I
|
|
|
|
/
|
|
|
|
|
|
/
|
|
/
|
|
|
|
/
|
|
I
|
|
|
|
/
|
|
/
|
|
|
|
/
|
|
I
|
|
|
|
/
|
/
|
/
|
|
|
Annexes 5 : Propriétés de l'acier
galvanisé utilisé pour les supports de panneaux de
signalisation
Tableau A5.34 :
Propriétés techniques de l'acier
galvanisé pour support de panneaux de
signalisation
|
Acier S235JR
|
Limite élastique
|
235 MPa
|
|
Energie de rupture à
20°C
|
27 J/Cm2
|
|
Coefficient de Poisson
|
0,3
|
|
Masse volumique
|
7800 Kg/m3
|
|
Module d'Young
|
220E+3 MPa
|
|
Résistance à la rupture / à la
traction
|
340 MPa
|
Annexes 6 : Présentation de la méthode
de calcul du logiciel i-VAC
Etape 1 : Choix des constituants
Les noms des constituants intégrés dans i-VAC sont
définis en annexe 2. Le code permettant de choisir les noms des
constituants est :

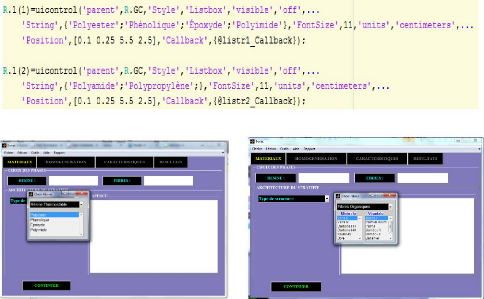
L'interface se présente comme suit au cours du choix :
Etape 2 : Choix du type d'architecture
Comme définie dans le cadre de validité
§1.7, l'architecture est validée par le code :
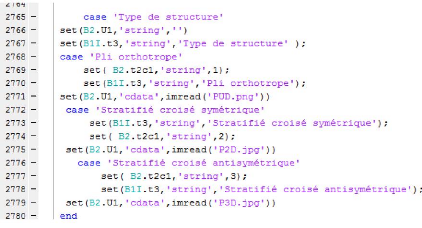
81
L'interface se présente comme suit au cours du choix :
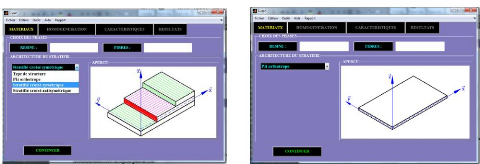
Etape 3 : Définition des
caractéristiques des constituants
Les constituants choisis à l'étape 1 affiche
automatiquement leurs valeurs sur l'interface HOMOGENEISATION du logiciel
grâce au code :
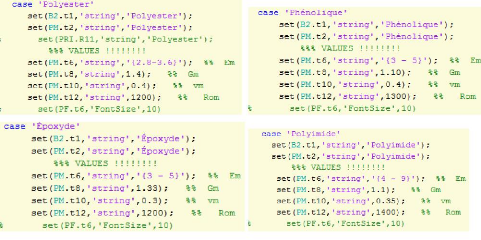
L'interface de ce calcul pour un stratifié croisé
symétrique est :
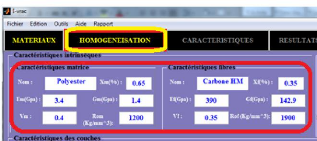
Les équations permettant de calculer les modules de
l'ingénieur selon le modèle de VOIGT-REUSS sont
implémentées dans le logiciel suivant le code :

82
L'interface de ce calcul pour un stratifié croisé
symétrique est :

Les équations permettant de calculer les coefficients
de la matrice de rigidité réduite ou matrice constitutive de la
structure sont définies dans §1.2.2. (Page 5) et
implémentées dans le logiciel suivant le code :
L'interface de ce calcul pour un stratifié croisé
symétrique à 9 couches est :
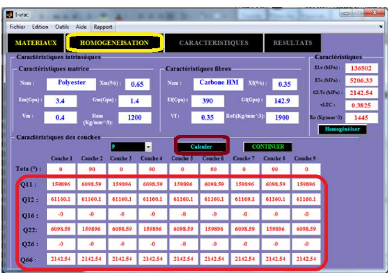
Etape 4 : Définition des
caractéristiques de l'élément de structure
La matrice de rigidité réduite calculée
à l'étape précédente permet de déduire les
coefficients de la matrice de déflexion définies §1.3.6.
(Page 11) et implémentés dans le logiciel suivant le
code :
83
L'interface de ce calcul pour un stratifié croisé
symétrique à 9 couches est :
Pour une poutre Pour une plaque
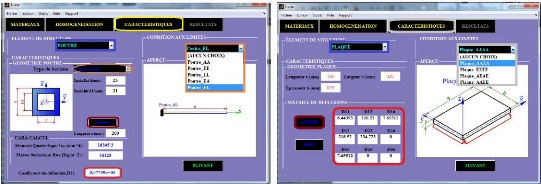
Etape 5 : Résultats
Les coefficients de la matrice de la matrice de
déflexion permettent de tracer le spectre de comportement de la
flèche d'un composite dont les équations sont définies
dons §2.2 (cas des poutres) et §2.3 (cas des plaques). Ces
équations sont implémentées dans le logiciel suivant le
code :
Pour la poutre EL
84
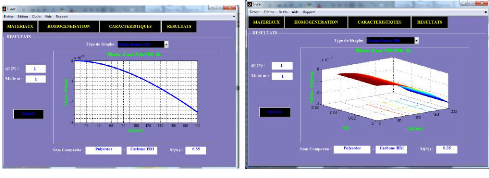
Visualisation 2D Visualisation 3D
Pour la plaque AAAA
Le logiciel de calcul i-VAC possède 3664 lignes de
code.
85
86
BIBLIOGRAPHIE
[1J : RICHARD NTENGA, «
Modélisation multi-échelle et caractérisation de
l'anisotropie élastique de fibres végétales pour le
renforcement de matériaux composites », Thèse de doctorat de
UNIVERSITÉ BLAISE PASCAL(UBP) - CLERMONT II / UNIVERSITÉ DE
YAOUNDÉ I (UYI), 2007 ;
[2J : A. J. ATANGANA, « Théorie
des plaques de Love-Kirchhoff », notes de cours, Unité de Formation
Doctorale de Douala, dispensé le 13 Janvier 2016 ;
[3J : Jean M. Berthelot, «
Mécanique des matériaux et structures composites »,
3ème édition, le Mans-France, Novembre 2012 ;
[4J : R. D. Adams, D. G. C. Bacon, «
Measurement of the flexure damping capacity and dynamic Young's modules of
metals and reinforced plastics », Journal of physics D: Applied physics,
6, 27-41 (1973) ; [5J : S. J. Hwang, R. F. Gibson, « The
use of strain energy-based finite element techniques in the analysis of various
aspect of damping of composite materials and structures », journal of
composite materials, 26, 2585-05 (1992) ;
[6J : B. C. Nakra, « Vibration control
with viscoelastic materials- III », shock and vibration digest. 16 (5),
17-22 (1984) ;
[7J : J.C. Pascal, « Vibrations et acoustique 2 »,
Notes de cours, Ecole Nationale Supérieure du Mans, Université du
Maine, 2008/2009 ;
[8J : F. Beténé, «
Matériaux composites, polycopie de cours », Unité de
Formation Doctorale de Douala, Version de Décembre 2015 ;
[9J : R. Ntenga, « Mécanique des
matériaux composites part 1 », polycopie de cours, Unité de
Formation Doctorale de Douala, Version de Octobre-Novembre 2010 ;
[10J : P. Vannucci, « Introduction au
cours matériaux composites partie : Anisotropie et mécanique des
stratifiés », Notes de cours Master 2 DSME, Ecole Nationale
Supérieure du Mans, Université Versailles
Saint-Quintin-en-Yvelines, Février 2007 ;
[11J : A. W. Leissa, « The free
vibration of rectangular plates, Journal of sound and vibration ». 31(3),
257293 (1973) ;
[12J : Fabien BETENE, « Etude des
propriétés mécaniques et thermiques du plâtre
renforcé de fibres végétales tropicales »,
Thèse de doctorat de UNIVERSITÉ BLAISE PASCAL(UBP)- CLERMONT II /
UNIVERSITÉ DE DOUALA (UD), 2012 ;
[13J : M. Assarar, A. El Mahi, J-M. Berthelot, « Analyse
de la réponse dynamique des structures en matériaux composites
». 19ème Congrès Français de Mécanique.
Marseille, 24-28 août 2009 ;
[14J : Lionel Gendre, « Matériaux composites et
structures composites », polycopie de cours, ENS Cachan, version du 17 Mai
2011 ;
87
[15J : BASSIROU SOUAIBOU (FM5), BOFIENNE ROLAND PIERRE (FM5),
« Etude d'extraction, caractérisations mécaniques et essais
de conservation des fibres de l'écorce de Baobab », Mémoire
de fin d'étude en vue de l'obtention du DIPET II à l'ENSET de
DOUALA (2010/2011) ;
[16J : LABI TAOKREO (CM5), ABDOURAMAN DJOBI
(CM5), « Extraction et caractérisation mécanique des fibres
de l'écorce de la tige de gombo », Mémoire de fin
d'étude en vue de l'obtention du DIPET II à l'ENSET de DOUALA
(2010/2011) ;
[17J : BOUKAR OUSMAN (CM5), BAYAMA
ETIENNE-MAGLOIRE (CM5), « Extraction et caractérisation
mécanique des fibres de la feuille de palmier Doum, Hyphaene Thebaica
», Mémoire de fin d'étude en vue de l'obtention du DIPET II
à l'ENSET de DOUALA (2010/2011) ;
[18J : FEKAPING DIESSE CYRILLE (FM5), TCHIKOUA ANDRE (FM5),
Extraction, description et propriétés mécaniques en
traction de tissus fibreux de l'écorce de la tige de Kenaf (Hibiscus
Cannabinus), Mémoire de fin d'étude en vue de l'obtention du
DIPET II à l'ENSET de DOUALA (2010/2011) ;
[19J : EMATA CLOVIS (FM5), NDJING ALI (FM5),
Etude du fluage des fibres de bambou de raphia (Vinefera), Mémoire de
fin d'étude en vue de l'obtention du DIPET II à l'ENSET de DOUALA
(2010/2011) ;
[20J : NZOKOU TALLA GATIEN (FM5), YANMO SEMO SEVERIN PATRICK
(FM5), « Extraction, description physiologique et caractérisation
mécanique des fibres de palmes », Mémoire de fin
d'étude en vue de l'obtention du DIPET II à l'ENSET de DOUALA
(2010/2011) ;
[21J : BENGONO NGWA DENISE (CM5), OLIBI RICHARD AMEDEE (CM5),
« Fabrication d'un matériau composite à base de fibres de
l'axe central du régime de bananier et de matrice en polymère
», Mémoire de fin d'étude en vue de l'obtention du DIPET II
à l'ENSET de DOUALA (2010/2011) ;
[22J : « Support & fixation », Notes d'informations
du SETRA.
« La paix universelle se réalisera un jour non
parce que les hommes deviendront meilleurs mais parce qu'un nouvel ordre, une
science nouvelle, de nouvelles nécessités économiques leur
imposeront l'état pacifique. »
Citation de Anatole France
| 

