ÉCOLE DOCTORALE DES SCIENCES FONDAMENTALES ET
APPLIQUÉES
POSTGRADUATE SCHOOL FOR PURE AND APPLIED
SCIENCES
-----------------
Unité de Formation Doctorale des Sciences de
l'Ingénieur
Postgraduate Training Unit for Engineering
Sciences
-----------------
Laboratoire d'Énergie Modélisation
Matériau et Méthodes (E3M)
Laboratory of Energy Modeling Materials and Methods
(E3M)
MÉMOIRE DE FIN D'ÉTUDE
Présenté et soutenu en vue de
l'obtention du diplôme de
Master 2 Recherche en Sciences de
l'Ingénieur
PARCOURS TYPE : TELECOMMUNICATIONS ET SYSTEMES
D'INFORMATION
THEME :GESTION DU TRAFIC ROUTIER AVEC
PRISE DE DÉCISION PAR LOGIQUE FLOUE : cas du carrefour
ndokoti
RESUME
Ces travaux de recherche traitant de l'intelligence
artificielle, utilisent la Logique Floue comme outils de modélisation
pour gérer de façon « intelligente » le
trafic routier afin de réduire au minimum les embouteillages qui
paralysent la circulation dans la ville de Douala en général, et
le carrefour NDOKOTI en particulier.
Après avoir mené une étude rationnelle
sur les causes réelles de la congestion du trafic routier, nous avons
commencé par déterminer les variables d'entrée/sortie
(input/output), puis nous avons construit notre système à
logique floue en formulant des variables linguistiques pour chaque
paramètre, puis la fuzzification, la construction de la base de
règles floues, et enfin la déffuzification. Les courbes obtenues
après simulation sur la plateforme logicielle MATLAB montrent
effectivement que cette approche par logique floue est prometteuse.
Par ailleurs, nous avons ajouté un petit module
intelligent appelé TEMPORISATEUR donc le rôle majeur est de
limiter le temps de passage d'une voie qui tend à aller au-delà
de 120 secondes, considérées comme maximum de temps d'attente.
Les résultats obtenus satisfont bien aux exigences des
hypothèses de départ comme le montre la figure
3.8 (tracé en rouge) dans laquelle le temps de changement de feu en
ordonnée admet 120 comme asymptote(en rouge), ce qui témoigne
bien d'une valeur à ne pas franchir (tracé en rouge). Ceci dit,
on ne peut attendre plus de 120s pour passer à un changement de feu.
En définitive, on pourra finalement remplacer les
agents de police qui gèrent la circulation dans les carrefours par
notre système conçu sur la base de la LOGIQUE FLOUE.
Mots clés : trafic routier
-intelligence artificielle - logique floue -fuzzification- base
d'inférence- déffuzification - temporisateur - asymptote.
INTRODUCTION
La gestion intelligente du trafic routier nécessite
des méthodes et outils de plus en plus perfectionnés. Le trafic
routier mondial et les transports urbains sont essentiellement tributaires du
parc automobile, et de l'état de la voirie qui peuvent faciliter la
mobilité urbaine ou rendre difficile les transports des personnes et des
biens. Le développement des infrastructures et des machines qui
permettent notre déplacement, nos correspondances et notre
approvisionnement a toujours été au coeur des
préoccupations des pouvoirs publics. Il semble évident de dire
aujourd'hui que le problème du trafic routier ou du moins les
difficultés liées au déplacement vont suivre une
croissance exponentielle si rien n'est fait car, en effet, si les
infrastructures de l'époque médiévale causaient moins
d'embouteillage avec le parc automobile de l'époque, il n'en demeure pas
moins que le 21eme siècle est arrivé avec son lot de
difficultés parmi lesquelles les embouteillages.
Nous disposons d'une pléthore de ressources pour
réguler le phénomène d'embouteillage dans le monde. L'une
de ces ressources est l'intelligence artificielle, qui, selon Virginie
MATHIVET, (virginie Mathivet, 2004) consiste
à rendre intelligent un système artificiel, principalement
informatique ». Palliant cette mouvance, nous nous sommes
intéressés au secteur du transport urbain plus
précisément le problème de gestion du trafic
routier.
L'évolution technologique et scientifique à
travers la recherche et la création de multiples algorithmes et
plateformes spécialisés a transformé l'intelligence
artificielle avec sa composante d'apprentissage automatique (le Machine
Learning) en une sorte « d'oracle, de
voyant......» capable d'étudier un phénomène
quelconque à travers l'exploitation et le stockage de ses données
pour prédire son comportement futur (Didier
Müller, 2016).
Le souhait d'apporter notre contribution au
développement futur du transport urbain au Cameroun mais surtout de
l'amélioration du trafic routier pour diminuer les embouteillages nous a
motivé pour le choix de ce thème
intitulé « Gestion du Trafic Routier avec prise
de décision par Logique Floue : cas du carrefour Ndokoti
»
La première partie se focalise sur l'état
de l'art et la problématique sur la situation des embouteillages dans le
monde en général, et la ville de Douala pour le cas
d'espèce. La deuxième partie : Méthodes et
Matériels appropriés utilisés quant à lui,
présente les outils de modélisation et les moyens
utilisées en vue de la réalisation de l'objet de ce
mémoire, en terme d'architectures matérielle et logicielle que
nous avons conçues. En fin le troisième chapitre :
résultats et discussion, présente les choix techniques
opérés, l'environnement matériel et logiciel dont on a
disposé, et la description des résultats obtenus ainsi que leur
faisabilité dans le cadre local de la ville de Douala.
REVUE DE LA LITTÉRATURE
Le trafic routier mondial et les transports urbains sont
essentiellement tributaires du parc automobile, et de l'état de la
voirie qui peuvent faciliter la mobilité urbaine ou rendre difficile les
transports des personnes et des biens notamment en ville où les
ralentissements aux heures de pointe peuvent avoir un impact notable sur
l'organisation des activités, l'économie ou encore
l'écologie (Sébastien Faye,
2014). Les nouvelles technologies innovantes dites
« intelligentes » peuvent bien être utilisées
pour résoudre les difficultés liées à la congestion
routière. Un tel système peut, par ailleurs, réagir aux
variations du trafic en régulant dynamiquement les flux de
véhicules (Zhou et al, 2010). Les équipements
tels que les feux de circulation deviennent alors des éléments
actifs dans la réduction des embouteillages et dans la gestion de la
sécurité, améliorant globalement l'expérience des
usagers.
1. Définitions
La Congestion est un phénomène qui survient
lorsque la demande (le nombre de véhicules qui cherchent à
utiliser une infrastructure donnée) est supérieure à la
capacité de cette infrastructure. Si la demande excède la
capacité, alors des véhicules seront ralentis à
l'entrée de l'infrastructure, formant ainsi un bouchon. (Certu,
2010) Ces véhicules excédentaires seront à chaque
instant plus nombreux qu'à l'instant précédent. Comme
chaque véhicule occupe une certaine longueur de voie, la longueur de la
file d'attente ne fera que croître en proportion du nombre de
véhicules présents dans cette file d'attente (Moustapha
,2014).
2. Présentation des systèmes
de gestion du trafic routier existants dans le monde.
Selon le Comité des Constructeurs Français
d'automobiles (CCFA) en France aujourd'hui (2017) il y'a environ 40 millions de
véhicules, si toutes ces voitures doivent se déplacer ça
fait un énorme embouteillage. Une enquête menée par la
chaine de télévision française BFM TV montre que 80
millions d'heures sont perdues dans les embouteillages chaque année en
France.
Seulement, depuis leur publication, les conditions de
circulation ont grandement évoluéì, de même que les
technologies et les théories touchant aux mathématiques ou aux
systèmes informatiques. Aujourd'hui, de nombreuses modélisations
du trafic routier sont nées, ces modèles sont
généralement classifiés en deux principales familles
(HB, 2001), que nous décrivons ci-après.
Les modèles microscopiques qui décrivent les
véhicules individuellement. Ensuite, les modèles macroscopiques,
qui décrivent la circulation aÌ l'échelle d'un ensemble de
véhicules sur une plus grande longueur de route.
Notons que deux autres classes de modélisations
existent, mais sont moins courantes que les modèles
microscopiques ou macroscopiques. D'une part,
les modèles mésoscopiques sont une classe de modèles
intermédiaire (PMN, 1997; HB, 2001). Ils permettent de
modéliser les véhicules par paquets, qui sont
représentés par des pelotons pouvant s'échanger des
véhicules. D'autre part, les modèles sous-microscopiques sont
aÌ un niveau en dessous des modèles microscopiques.
2.1 Modèles
microscopiques
Les modèles microscopiques permettent de décrire
le comportement individuel de chaque véhicule et conducteur sur le
réseau routier, mais ils permettent en outre de réaliser des
simulations numériques réalistes (BBEK, 2011).
Dans ces modèles, le comportement d'un véhicule est perçu
de façon individuelle par ses voisins comme un fluide qui coule dans un
milieu homogène et de façon rectiligne. La physique statistique
permet d'étudier le comportement de systèmes physiques comprenant
un nombre élevéì de particules. Autrement dit, il est
possible de décrire le système macroscopique aÌ partir des
caractéristiques de ses éléments, qui sont microscopiques
et appliquer les théories de la mécanique des fluides.
2.2 Modèles
macroscopiques
Les modèles macroscopiques servent aÌ la
théorie analytique et permettent de décrire le comportement de
flux de véhicules, sans distinguer les véhicules
individuellement. Ces modèles sont parmi les plus anciens et
considèrent le trafic comme étant un phénomène
continu (Whi, 2011 ; LW, 1955). Le constat établi est
que généralement, le plus gros flux (en termes de
véhicules) prend le dessus (et donc la prioritéì) sur le
flux de plus faible importance. Ces modèles sont toutefois plutôt
utilisés pour des études de densitéì de trafic et
de capacitéì.
La théorie des files d'attente rentre dans la
catégorie des modèles macroscopiques et se veut bien
adaptée au cas du trafic routier (War, 1952 ; Akc, 1997 ; YAKS,
2010). Cette théorie appartient au domaine des
probabilités et permet une description détaillée des files
d'attente de véhicules, reparties sur un ensemble de voies. Dans le cas
des intersections, une file d'attente se créée lorsque le nombre
d'automobilistes dépasse un certain seuil ou lorsque, par exemple, un
feu est au rouge.
.
3. Les systèmes de gestion des
embouteillages dans le monde
En Europe, trois grandes approches complémentaires de
gestion des embouteillages se sont principalement développées et
sont représentatives de ce qui se fait aÌ travers le monde.
3.1 L'approche Anglaise
La première approche, d'origine Anglaise, se base sur
des principes mathématiques. Le modèle TRANSYT (CL,
1987) est notamment neì de cette démarche, puis a
rapidement évoluéì vers TRANSYT 7 avant de devenir le
système SCOOT (RB, 1991). Aujourd'hui, cette approche
est l'une des plus populaires et compte de nombreux autres systèmes de
régulation.
3.2 L'approche
Allemande
La deuxième approche, d'origine Allemande, se base sur
des coordinations horaires pointues. Cette approche a su faire ses preuves et a
essentiellement étéì mise en oeuvre par Siemens jusqu'aux
années 1990, notamment dans certains pays du nord de l'Europe ouÌ
le style de conduite appelait aÌ un trafic plus régulier. Cette
solution a étéì par la suite abandonnée au profit
de systèmes tels que SCOOT, ou de modèles temps réels
comme MOTION, installeì aÌ Cologne.
3.3 L'approche
Française
La troisième approche, d'origine Française, part
d'un principe plus simple : "aucune machine ne remplacera jamais ce qui est
l'essence même de l'homme : l'esprit et la compréhension" (Louis
V. Gerstner). Les modèles mathématiques sont ici mis de
côtéì au profit de l'expérience humaine.
D'une manière plus générale, ils mettent
également en avant des systèmes de supervision des réseaux
de transports. Citons par exemple CLAIRE-SITI (SL, 2013).
Il existe aussi des solutions logicielles pour la gestion des
embouteillages. Ces solutions reposent essentiellement sur les systèmes
d'information sur l'état du trafic par des usagers eux même dans
un cadre communautaire.
Ces solutions mobiles ne sont pas appropriées pour
notre pays, car elles imposeraient des téléphones ou des
terminaux du type SMARTPHONE, or le niveau de vie au Cameroun permet
difficilement à tout le monde d'avoir un smartphone, en plus, comme pour
les solutions web, la qualité du signal au Cameroun laisse à
désirer.
3.4 Solution
intelligente du trafic
Les solutions intelligentes de gestion du trafic encore
appelées système de transport intelligent (STI) sont une
application des nouvelles technologies de l'information et de la communication
au domaine des transports et de sa logistique. On les dit "Intelligents" parce
que leur développement repose sur des fonctions
généralement associées à de l'intelligence
artificielle : capacités de choix, mémorisation, communication,
traitement de l'information et sans comportement adaptatif. Le recours aux STI
s'intègre aussi dans un contexte de développement durable : ces
nouveaux systèmes concourent à la maîtrise de la
mobilité en favorisant entre autres le report de la voiture vers des
modes plus respectueux de l'environnement (Sébastien FAYE,
2014)
3.4.1 Modèle mathématique
Le modèle mathématique a aussi été
utilisé pour modéliser le trafic routier. Il fait principalement
intervenir des équations aux dérivées partielles Le
modèle le plus utilisé dans ce domaine est le modèle LWR,
il s'écrit sous la forme d'une loi de conservation scalaire que nous
connaissons sous le terme d'équation de continuité
(Costeseque Guillaume, 2018).
  , ,   (1) (1)
Avec t > 0 est la variable temporelle, x  R est la variable d'espace, (t; x) désigne la densité de
véhicules au point x et au temps t. R est la variable d'espace, (t; x) désigne la densité de
véhicules au point x et au temps t.
L'approche mathématique dans toute sa rigueur semble
être très fastidieuse car les phénomènes qui
régissent les embouteillages sont dits non linéaires, c'est la
raison pour laquelle nous avons pensé à un système
à logique floue qui gère mieux la non linéarité des
embouteillages.
3.4.2 La logique floue.
La logique floue sert à représenter des
connaissances incertaines et imprécises afin de
prendre une décision même si l'on ne peut pas estimer de
façon précise les entrées/sorties du système. Les
prémisses de la logique floue sont apparues avant les années
1940, avec les premières approches, par des chercheurs
américains.
3.5 Les fonctions
d'appartenances
Un ensemble flou est définit par sa fonction
d'appartenance, qui correspondant à la notion de la fonction
caractéristique en logique classique.
Supposons que nous voulions définir l'ensemble des
personnes de taillemoyenne. En logique classique, nous conviendrons par exemple
que les personnes de taille moyenne sont celles dont la taille est comprise
entre 1.60m et 1.80m.la fonction caractéristique de l'ensemble donne
« 0 » pour les tailles hors de l'intervalle [1.6m ; 1.8m] et « 1
» dans cet intervalle. L'ensemble flou des personnes de taillemoyenne sera
définit par une fonction d'appartenance qui diffère d'une
fonction caractéristique par le fait qu'elle peut prendre n'importe
quelle valeur dans l'intervalle [0,1] à chaque taille possible
correspondra un degré d'appartenance à l'ensemble des tailles
moyennes compris entre 0 et 1.
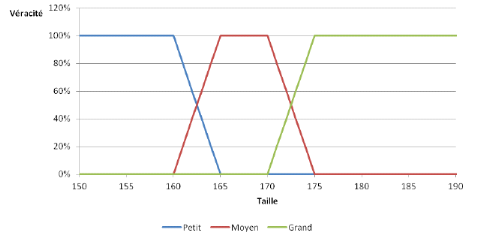
Figure 1.3 fonction
caractéristique
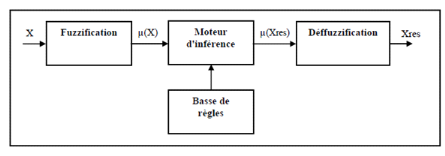
Figure 1.5 : schéma de la
commande Floue (selon Virginie MATHIVET)
X représente le vecteur des
entrées, Xrescelui des commandes,
ì(X) et ì(Xres) les fonctions
d'appartenances correspondantes.
3.5.1 Bases de règles et définitions
On regroupe dans ce bloc, d'existence virtuelle, l'ensemble
des définitions utilisées dans la commande floue (univers de
discours, partitions floue, choix des opérateurs.), ainsi que la base de
règles «Si...alors...» de la stratégie de commande de
l'expert.
3.5.2 Interface de fuzzification
Les opérateurs utilisés dans la commande floue
agissent sur des sous-ensembles flous. Par conséquent, il est
nécessaire de transformer les variables non floues provenant du mode
extérieur en des sous-ensembles flous. Pour se faire, on utilise un
opérateur dit de fuzzification qui associe à une mesure de la
variable x0 une fonction d'appartenance particulière
ìx0(x).
3.5.3 Mécanismes d'inférence
À partir de la base de règles (fournie par
l'expert) et du sous ensemble flou X0 correspondant à la fuzzification
du vecteur de mesure x0=[x0,1,............. x0,n]TU, le
mécanisme d'inférence calcule le sous-ensemble flou
ì(x0) relatif à la commande du système En
général, plusieurs valeurs de variables floues, convenablement
défini par des fonctions d'appartenance, sont liées entre elles
par des règles, afin de tirer des conclusions. On parle alors de
déductions floues
3.5.4 Interface de déffuzification
Comme on l'a vu à la section précédente,
les méthodes d'inférences fournissent
Une fonction d'appartenance résultante ìRES(z)
pour la variable de sortie z. Il s'agit donc d'une information floue. Les
actionneurs actuels, utilisées dans les boucles de commande ne
s'accompagnent pas de ce genre de décision, il convient de la
transformer en une grandeur de commande précise : c'est le but de
l'étape de déffuzification.
RÉSULTATS ET DISCUSSION
Il est question dans ce travail de mettre sur pied un
système de prise de décision par logique floue susceptible de
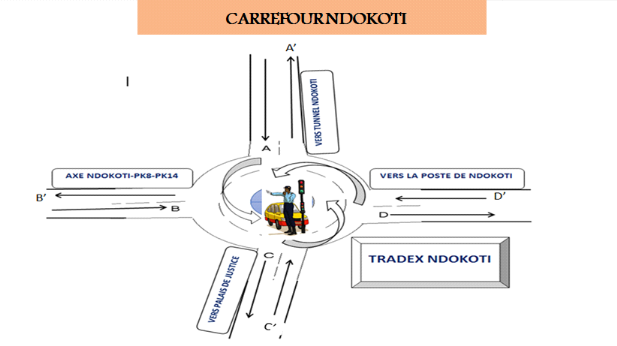
gérer l'état du trafic routier auCameroun. Ainsi grâce
à ce système on pourra savoir sur l'état du trafic
dans la ville notamment sur les axes embouteillés et en priorité
l'axe Ndokoti-FGI en passant par PK8. Pour y parvenir, nous avons fait une
étude sur les causes de la congestion et leurs impacts dans la
société, puis une étude générale sur les
différents outils d'informations sur l'état du trafic
présent sur le marché, nous nous sommes appuyés sur leurs
limites pour élaborer notre cahier de charges.
Après l'analyse des données faisant office de
paramètre d'entrée de notre système Flou, l'ensemble du
travail a été reparti suivant quatre points à savoir :
définition des Input, des Output et des variables linguistiques,
Fuzzification,Base des règles floues et la Déffuzification.
À la suite des différents développements
présentés précédemment, cette partie quant
à elle vise en la présentation et l'évaluation des
résultats obtenus. À cet effet, les résultats seront
présentés suivant les données que nous avons eue
après notre descente sur le lieu-dit NDOKOTI correspondant aux
réalités observées pendant ces périodes-là,
cela reste valable pour les courbes obtenues.
3.5.5 Démarche de
construction du contrôleur flou pour la gestion des feux de
circulation
La construction de notre contrôleur flou repose
sur quatre étapes principales : définition des
entrées, (input) une sortie (Output) et des variables linguistiques
pour chaque paramètre, fuzzification,construction de la base de
règles floues et déffuzification.
3.5.5 Définition des variables d'entrées/sorties
et des variables linguistiques
Les paramètres significatifs retenus pour la
conception de notre système intelligents de commande des feux de
signalisation sont représentés dans le tableau
ci-dessous :
Tableau 3.1 variables
d'entrée/sorte et linguistique.
|
Paramètres
|
Fonctions
|
Variables linguistiques
|
|
Entrée 1 :nv pk14
|
Nombre de véhicules sur la voie
PK14
|
Faible
|
|
Moyen
|
|
Élevé
|
|
Entrée 2:nvPOSTE
|
Nombre de véhicules sur la voie
POSTE
|
Faible
|
|
Moyen
|
|
Élevé
|
|
Entrée3 : nvPALAIS
|
Nombre de véhicules sur la voie
PALAIS
|
Faible
|
|
Moyen
|
|
Élevé
|
|
Entrée 4:nvTUNNEL
|
Nombre de véhicules sur la voie TUNNEL
|
Faible
|
|
Moyen
|
|
Élevé
|
|
Sortie : FEU
|
Nombre de véhicules sur la voie
prioritaire
|
Faible
|
|
Moyen
|
|
Élevé
|
3.5.6 Fuzzification
Elle consiste à transformer les variables
réelles en ensembles flous. Ainsi, chaque variable linguistique
correspond à un ensemble flou où chaque valeur réelle
possède un degré d'appartenance à l'ensemble.
Le type de fonction d'appartenance utilisé est
la fonction Gaussienne (Gaussmf dans Matlab).
Les autorités en charge du transport au
Cameroun n'ayant pas une structure de collecte d'information de trafic, nous
nous sommes déplacés pour faire une collecte d'information sur le
terrain en comptant le nombre de véhicule sur unité de surface
donnée. Les résultats sont contenus dans ce
tableau :
Tableau 3.2 variables linguistiques
et réelles.
|
Paramètres
|
Variables linguistiques
|
Valeurs réelles
|
|
Entrée1 : npk14
|
Faible
|
Entre 0 et 10 véhicules
|
|
Moyen
|
Entre 8 et 25 véhicules
|
|
Elevé
|
Entre 20 et 40 véhicules
|
|
Entrée2: nPOSTE
|
Faible
|
Entre 0 et 10 véhicules
|
|
Moyen
|
Entre 8 et 25 véhicules
|
|
Elevé
|
Entre 20 et 40 véhicules
|
|
Entrée3: nPALAIS
|
Faible
|
Entre -2 et 1 minute
|
|
Moyen
|
Entre 0 et 3 minutes
|
|
Elevé
|
Entre 1 et 5 minutes
|
|
Entrée4: nTUNNEL
|
Faible
|
Entre -1 et 1 minute
|
|
Moyen
|
Entre 0 et 2 minute
|
|
Elevé
|
Entre 1 et 3 minutes
|
Les quatre entrées sont symbolisées par
le schéma suivant :
3.5.7 Base des règles floues
La base des règles floues consiste à
ressortir les cas possibles des situations incertaines pouvant se produire lors
de la commande intelligente des feux. Elle est établie à partir
des connaissances d'un expert et insérée dans le contrôleur
flou pour raisonner face aux situations incertaines du trafic routier.Pour
l'ensemble des quatre paramètres cités plus haut le nombre total
de règles est donné par la formule suivante :

- 3 fonctions d'appartenance
- 4 Variables d'entrée
Ce qui fait 34 = 81 règles
Floues.
Les règles floues établies pour ce
travail sont de la forme :
- Si entrée1 est faible
et entrée2 est moyen alors temps de
Feu est petit
Après avoir définie les variables
d'entrée et de sortie, ainsi que les fonctions d'appartenance, on
construit le système flou comme l'indique la figure suivante :

Figure 3.1 : construction du système
flou
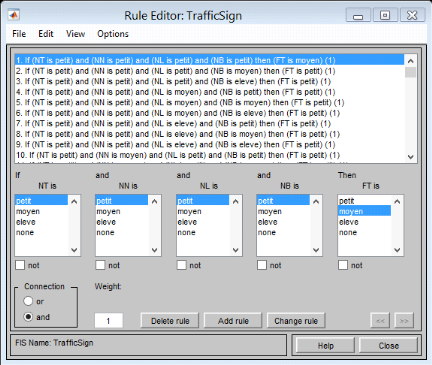
Figure 3.2 règles
générées par notre système
Comme nous l'avons dit plus haut, notre système
compte 81 règles floues donc la totalité est en
annexe.

Figure 3.3 : base de règles floues (en
faisant varier les valeurs des entrées, on peut voir comment la sortie
varie)
De toutes ces règles il en ressort la figure des
variables linguistiques suivantes :

Figure 3. 4 variables
linguistiques du trafic routier.
Une fois les variables linguistiques et les fonctions
d'appartenance établies, on peut visualiser en sortie une surface
représentant la sortie du système comme le montre la figure
ci-dessous :
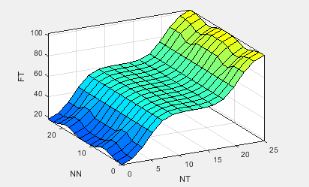
Figure 3.5 : prise de
décision du système flou sur le trafic routier en 3D
Arrivé à ce niveau, nous pouvons établir
une relation entre la durée de feu et le nombre de voiture sur une voie,
prise au hasard ; ceci donne la figure suivante :
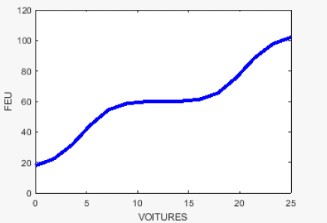
Figure 3.6 évolution de la
durée du feu en fonction du nombre de voiture
INTERPRÉTATION :
Cette courbe ayant en abscisse le nombre de voitures,
et en ordonnée le temps maximal de durée du FEU montre que la
durée de temps de passage des voitures est proportionnelle au nombre de
voiture présent sur la voie active, ce qui montre bien le
caractère intelligent de notre système a logique
floue.
3.5.8 Phase de simulation sur
SIMULINK
Dans le souci de simuler le comportement du trafic routier en
temps réel, nous avons utilisé SIMULINK de Matlab, ce qui nous a
conduits au montage suivant :

Figure 3.7 : Schéma Bloc pour la simulation de
l'évolution de la durée d'allumage fournie par le
contrôleur
Cette simulation donne la courbe suivante

Nombre de voiture par voie
Figure 3.8 : Courbe
d'évolution de la durée d'allumage fournie par le
contrôleur
INTERPRÉTATION :
Sur cette courbe, on voit bien l'évolution de
la durée d'allumage fournie par le contrôleur, il en ressort que
la courbe en noir qui montre l'évolution de la circulation en
période normale, sans embouteillage, et la courbe en couleur bleu-ciel
montre l'évolution du temps de passage des véhicules en
périodes de pointe, c'est-à-dire pendant les embouteillages.

Figure 3.9 schéma bloc du
système flou
Chaque feu est doté de son propre contrôleur Flou
(ou1, out2, out3 et out4), qui envoie ses résultats à un
contrôleur central intelligent qui prend enfin une décision.
Puis on a le graphe suivant :
Temps de durée des feux
Différentes voie de circulation

Figure 3.10 : variation de la
durée du feu en fonction de d'état du traffic routier
INTERPRÉTATION :
Ici, on remarque que les 4 variables d'entrée
sont symbolisées par 4 couleurs différentes telles que
illustrées par la légende, par ailleurs, l'évolution des
courbes en dents de scie atteste de ceci que chaque voie a son propre temps de
passage, après un temps équivalent a la période
d'échantillonnage qui est de 0,2 , le système
réévalue l'état du trafic, Ce qui montre bien que la
durée d'allumage du feu dépend bel et bien du nombre de voiture
sur la voie sollicitée, à titre d'illustration, la couleur JAUNE
représente le temps de passage pour la voie menant au tunnel et le
graphe montre bien que cette durée est plus élevé entre
1.6 et 1.8, et moins élevée entre 0.6 et 0.8 ce qui
témoigne véritablement du caractère intelligent du
système.
AJOUT D'UN TEMPORISATEUR
Notre système tel que construit et donnant la
priorité de passage à la voie ayant le plus grand nombre de
voitures semble présenter une défaillance en ceci que lorsque la
fille d'attente devient très longue, les voies non prioritaires risquent
de rester dans une attente très longue , pour pallier à cet
inconvénient , nous y avons ajouté un
TEMPORISATEUR au niveau du critère de passage dont le
but consiste à changer la priorité d'une voie lorsque le temps de
passage d'une voie prioritaire devient très long.Pour cela, nous avons
programmé le bloc décisionnel en intégrant une fonction
appelée TEMPORISATEUR dont le code apparait dans l'interface
suivante :

Figure 3.11 : Temporisateur pour critère de passage au
feu vert en fonction du traffic
CONCLUSION ET PERSPECTIVES.
La congestion routière est un phénomène
de plus en plus courant, surtout dans les grandes villes et directement
perceptible par le grand public, car elle est subie par de nombreux usagers.
C'est pourquoi, depuis une cinquantaine d'années, des théoriciens
du trafic cherchent à mieux comprendre et à quantifier les
mécanismes à l'oeuvre. C'est dans ce contexte que la
présente étude consistait au développement d'un
système de gestion du trafic routier par la logique comme outils d'aide
à la décision, nous avons organisé le travail en trois
activités principales : (1)la recherche des variables d'entrées
propres au cas local du Cameroun en général et spécifique
au cas du carrefour NDOKOTI en particulier et pouvant faire office de
variables significatives du trafic , (2)la fuzzification de ces variable en
guise de formatage pour être exploitables par un système flou et
(3) la définition des fonctions d'appartenance pour prévoir la
sortie du système en terme de Defuzzification dans le but de rendre
notre système exploitable.
Pour comprendre le problème d'embouteillage, il faut
garder présent à l'esprit que c'est un phénomène
qui survient lorsque la demande (le nombre de véhicules qui cherchent
à utiliser une infrastructure donnée) est supérieure
à la capacité de cette infrastructure. Si la demande
excède la capacité, alors des véhicules seront ralentis
à l'entrée de l'infrastructure, formant ainsi un bouchon. Ces
véhicules excédentaires seront à chaque instant plus
nombreux qu'à l'instant précédent. Comme chaque
véhicule occupe une certaine longueur de voie, la longueur de la file
d'attente ne fera que croître en proportion du nombre de véhicules
présents dans cette file d'attente.
Le présent travail ouvre ainsi les recherches sur les
perspectives suivantes :
- La base de notre système de gestion des
embouteillages reposant sur la logique floue n'est pas capable d'apprendre
face à de nouvelles situations. Ainsi, l'ajout des réseaux de
neurones pour leur capacité d'apprentissage aboutira à un
système hybride du type neuro-Flou à l'aide d'algorithmes de
reconnaissance de forme permettant de rendre robuste et évolutif
notre face à de nouvelles données en vue d'une extension
future,afin de migrer vers un système du type SOFT COMPUTING
pour gérer les embouteillages dans la ville de Douala
REFERENCES BIBLIOGRAPHIQUES
[AKÇ, 97]RahmiAkcelik.
«Lane-by-lane modelling of unequal lane use and flares at roundabouts and
signalised intersections : the SIDRA solu- tion». Dans : Traffic
Engineering+ Control 38.7 (1997), p. 388-99
[BBEK, 11] M. Behrisch, L. Bieker, J.
Erdmann et D. Krajzewicz. «SUMO - Simulation of Urban MObility : An
Overview». Dans : The Third International Conference on Advances in System
Simulation (SIMUL 2011). Barcelona, Spain, oct. 2011, p. 63-68.
[BEH, 11] Behrisch M., Bieker L., Erdmann J., et
Krajzewicz D. (2011); « Sumo - simulation of urban
mobility :An overview ». In The Third international
Conference on Advances in System Simulation (SIMUL 2011), Barcelona, Spain, pp.
63-68.
[BEN, 13] Benaicha S., Mouss H., Bencherif F. et
Srairi F. (2013); « Commande Neuro-Floue d'un
Système de Clinkérisation ». The international conference on
electronics &oïl: from theory to applications March 05-06, 2013,
Ouargla, Alegria.
[Boi, 92] F. Boillot et al. «Optimal
signal control of urban traffic networks».Dans : 472. London, 1992, p.
182-186
[CER, 08], CERTU
(2008).savoirs de base en sécurité routière :
généralités sur les carrefours plans. CERTU.
[CER, 10] Certu, (2010)
« GUIDE des aménagements
routiers »homogénéisé les pratiques et les
réponses aux demandes d'aménagements routiers (2010)
[Cha, 10]Chandra, Reggie and Gregory, Chris.
«InSync Adaptive Traf- fic Signal Technology : Real-Time Artificial
Intelligence Delivering Real-World Results». Dans : (juil. 2010).
[CHE, 05] Cheung S., Coleri S., Dundar B., Ganesh S.,
Tan C., et VaraiyaP. (2005). « Traffic measurement
and vehicle classification with single magnetic sensor. »
Transportation Research Record : Journal of the Transportation Research Board
1917(-1), 173-181.
[CHM, 58] ; Robert E Chandler, Robert
Herman et Elliott W Montroll. «Traffic dynamics : studies in car
following». Dans : Operations re- search 6.2 (1958), p. 165-184.
[CL, 87] B. M. Chard et C. J Lines.
«Transyt - the latest developments».Dans : Traffic engineering &
control 28.7-8 (1987), p. 387-390
[CSS, 00] Debashish Chowdhury, Ludger Santen
et Andreas Schadschnei- der. «Statistical physics of vehicular traffic and
some related system- s». Dans : Physics Reports 329.4 (2000), p. 199-329.
Didier Müller, Chapitre 10 :
Intelligence artificielle et jeux, mars 2016.
[Dim, 12]CatalinDimon. «Contributions
aÌ la modeìlisation et la commande des reìseaux de trafic
routier». TheÌse de doct. Ecole Centrale de Lille, 2012.
[DUB, 85] DUBOIS D. et PRADE H.
« Théorie des possibilités. Application à la
représentation des connaissances en informatique », Paris,
Masson, 1985
ESPINOZA, J., & al. (2005).Fuzzy Logic,
Identification and predictive Control.British Library Cataloguing.
[GCM, 1935] BD Greenshields, Ws Channing,
Hh Miller et al. «A study of traffic capacity». Dans : Highway
research board proceedings. T. 1935. National Research Council (USA), Highway
Research Board. 1935.
[GSE, 1946] Bruce Douglas Greenshields,
Donald Schapiro et Elroy L Erick- sen.Traffic performance at urban street
intersections. Rap.tech. 1946.
[GOR, 05] Gordon, R., W. Tighe, U. S. F. H.
A. O. of Operations, D. E. Associates, et I. Siemens (2005). Traffic control
systems handbook. US Dept. of Transportation, Federal Highway Administration
[HB, 01] Serge P Hoogendoornet Piet HL Bovy.
«State-of-the-art of ve- hicular traffic flow modelling». Dans :
Proceedings of the Institution of Mechanical Engineers, Part I : Journal of
Systems and Control Engineering 215.4 (2001), p. 283-303.
[HMS, 94] K. Larry Head, Pitu B.
Mirchandaniet Dennis Sheppard. «Hie- rarchical Framework for Real-Time
Traffic Control». Dans : Trans- portation Research Record 1360,
Transportation Research Board, Na- tional Research Council, Washington DC
(1992).
[KER, 08]Boris Kerner. (1999) ; "Congested
Traffic Flow: Observations and Theory", Transportation Research Record, Vol.
1678, pp. 160-167 (1999)
[LES, 14] Jean-Baptiste
Lesort, « Comprendre le trafic
routier »,2014
[LW, 55] Michael J Lighthill et Gerald
Beresford Whitham. «On kinematic waves. II. A theory of traffic flow on
long crowded roads». Dans : Proceedings of the Royal Society of London.
Series A. Mathematical and Physical Sciences 229.1178 (1955), p. 317-345.
[MAH, 07] Mahdaoui et H.L
Mouss(2007) : « the 4th International
Conference on Computer Integrated Manufacturing » CIP'2007.
[NS, 92] Kai Nagel et Michael
Schreckenberg. «A cellular automaton mo- del for freeway
traffic».Dans : Journal de physique I 2.12 (1992), p. 2221-2229.
[PMN, 97] ; Andreì de Palma,
Fabrice Marchal et YuriiNesterov. «METRO- POLIS : Modular system for
dynamic traffic simulation». Dans : Transportation Research Record :
Journal of the Transportation Re- search Board 1607.1 (1997), p. 178-184.
[ROL, 12] ROLLAND-MAYC(1984),.
« Les espaces géographiques flous, Thèse de Doctorat
d'État », Université de Metz, 1984,
[FAY, 14] Faye S (2014),.
« Contrôle et gestion du trafic routier urbain par un
réseau de capteurs sans fil ». Infrastructures de transport.
Telecom ParisTech, 2014.
[FAY, 12] Faye S., Chaudet C., et Demeure I.
(2012). A distributed algorithm for adaptive traffic lights control.In
15th IEEE Intelligent Transportation Systems Conference (ITSC 2012), Anchorage,
USA.
[RB, 74] DI Robertson et RD Bretherton.
«Optimum control of an inter- section for any known sequence of vehicle
arrivals». Dans :Procee- dings of the 2nd IFAC/IFIP/IFORS Symposium on
Traffic Control and Transportation Systems. 1974.
[SD, 80] A.G. Sims et K.W. Dobinson.
«The Sydney coordinated adaptive traffic (SCAT) system philosophy and
benefits». Dans : IEEE Tran- sactions on Vehicular Technology 29.2 (mai
1980).
[SHA, 13]) Shawn wang
(2013, « international journal of Data Mining,
Modeling and Management », 2013 ; vol 5 no 8.
[SL, 13]Geìrard SCEMAMA et Patrick
LAFFONT. «CLAIRE-SITI Sys- teÌme pour la supervision intelligente,
intermodale, inteìgreìe des reì- seaux de transport de
surface». Dans : TEC Transport environnement circulation 219 (jan. 2013)
[SS, 09] Matt Selingeret Luke Schmidt.
«A review of the cost, mainte- nance and reliability of popular adaptive
traffic control technologies». Dans : Adaptive Traffic Control Systems in
the United States (2009).
[LL, 11]Binyang Liu et Weifang Liu.
«Evaluation of traffic control methods at traffic circles». Dans :
Control and Decision Conference (CCDC), 2011 Chinese. Mai 2011,
[MAT, 14] Virginie Mathivet(2014),
« L'intelligence artificielle pour les développeurs : concepts
et implémentations en Java » aux éditions
Eyrolles.
[JYD, 04] Jyda Moustapha (2014), «
Modelisation Mathématique et Simulation du Trafic
routier », Université Paris-Est, 2014).
[War, 52] John Glen
Wardrop. «ROAD PAPER.SOME THEORETICAL ASPECTS OF ROAD TRAFFIC
RESEARCH.»Dans : ICE Procee- dings : Engineering Divisions. T. 1. 3.
Thomas Telford.
[Whi, 11] Gerald Beresford Whitham. Linear
and nonlinear waves. T. 42. John Wiley & Sons, 2011.
[WIE, 04] Wiering, M., J. Vreeken, J. van Veenen, et
A. Koopman (2004). « Simulation and optimization of traffic
in a city ». In Intelligent Vehicles Symposium, 2004
[YAKS, 10] Khalil M. Yousef, Jamal N.
Al-Karaki et Ali M. Shatnawi. «In- telligent Traffic Light Flow Control
System Using Wireless Sensors Networks».Dans : Journal of Information
Science and Engineering 26.3 (mai 2010).
[YOU, 10] Yousef, K. M., J. N. Al-Karaki, et A. M.
Shatnawi (2010). « Intelligent traffic light flow control
system using wireless sensors networks ». Journal of information
Science and Engineering 26(3).
[ZCZW, 10] B. Zhou, J. Cao, X. Zeng et H. Wu.
«Adaptive Traffic Light Control in Wireless Sensor Network-Based
Intelligent Transportation Sys- tem». Dans : Vehicular Technology
Conference Fall (VTC 2010-Fall)
[ZHO, 10] Zhou, B., J. Cao, X. Zeng, et H. Wu
(2010). « Adaptive traffic light control in wireless
sensor network-based intelligent transportation system ». In 72nd
IEEE Vehicular Technology Conference Fall (VTC 2010-Fall), Ottawa, Canada
| 

