5.4 Modélisation du système
L'approche objet est incontournable dans le cadre du
développement de systèmes logiciels complexes, car il est capable
de suivre les évolutions incessantes des technologies et des besoins
applicatifs. Cependant, la programmation objet est moins intuitive que la
programmation fonctionnelle, comme cela se faisait jadis. En effet, il est plus
naturel de décomposer les problèmes informatiques en termes de
fonctions qu'en termes d'ensembles d'objets en interaction. De ce fait,
d'après la logique des choses l'approche objet requiert de
modéliser avant de concevoir. La modélisation apporte une grande
rigueur, offre une meilleure compréhension des logiciels, et facilite la
comparaison des solutions de conception avant leur développement.
UML est une notation graphique conçue pour
représenter, spécifier, construire et documenter les
systèmes logiciels. Ses deux principaux objectifs sont la
modélisation de systèmes utilisant les techniques
orientées objet, depuis la conception jusqu'à la maintenance, et
la création d'un langage abstrait compréhensible par l'homme et
interprétable par les machines. Le langage UML propose uniquement une
notation dont l'interprétation est définit par un standard, mais
pas une méthodologie complète.
UML permet de construire plusieurs modèles d'un
système : certains montrent le système du point de vue des
utilisateurs, d'autres montrent sa structure interne, d'autres encore en
donnent une vision globale ou détaillée. Dans notre analyse, nous
allons présenter un des modèles, en l'occurrence le diagramme de
cas d'utilisation. Il permet de recueillir, d'analyser et d'organiser les
besoins.
Diagramme de cas d'utilisation
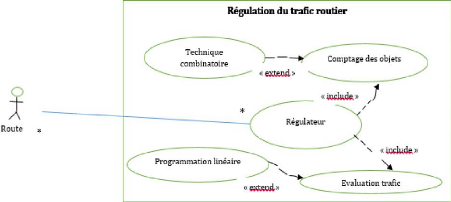
Avec beaucoup de simplicité, de rapidité et un
résultat à la hauteur de nos attentes, il est maintenant temps de
montrer l'interface de notre simulateur, appelé à
réfléchir à la place du robot roulage intelligent
amélioré.
Page | 45
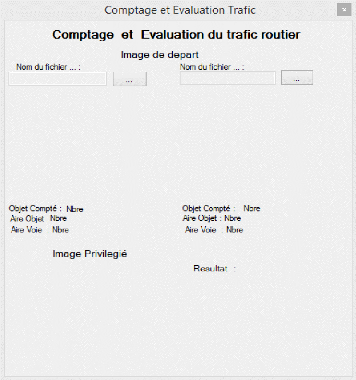
5.5 Fondement du simulateur
Dans notre démarche visant l'instauration d'un outil
simplificateur de traitement d'information pour la régulation du trafic
routier, nous avons pensé au niveau de l'expérimentation mettre
sur pied un logiciel. Et pour y arriver, Visual Studio 2012, C#, OpenCv sont
des éléments dont nous avons eu à faire recours afin de
mettre au point notre robot roulage intelligent virtuel. Nous avons
également développé des fonctions servant successivement
:
o au comptage des objets ;
o à l'estimation de l'aire de la voie ;
o à l'estimation de l'aire occupée par des objets
sur le trafic ;
o au calcul du coût du trafic ;
o à la restitution de l'image en sortie.
Notons que le résultat sera efficace que si l'image
à traiter sera une représentation en hauteur de la voie de
circulation.
| 

