CHAPITRE 6 :
programmation des séquences de
fonctionnement et coblage entrées /
sorties
Introduction :
Dans ce chapitre, il sera abordé en premier lieu la
programmation des séquences de fonctionnement qui regroupe une
étude architecturale de l'automate choisi et la mise en oeuvre des
séquences de fonctionnement. En second lieu nous présenterons les
schémas de cablage des entrées / sorties de l'automate.
|
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
|
59
|

I. ETUDE ARCHITECTURAL
1. Choix de l'automate
Nous allons utiliser dans ce projet un automate de marque
Télémécanique et ceci pour les raisons suivantes :
· Il est le plus utilisé dans les industries
camerounaises
· Nous possédons son logiciel de programmation
· Nous ne trouvons pas d'inconvénient pouvant nuire
à notre projet
Panorama de l'offre de Schneider Electric : TSX Nano, TSX Micro,
TSX Premium, TSX Quantum donc les caractéristiques principales
s'articulent comme suit :
Tableau 10 : Comparaison TSX [3]
|
TSX Nano
|
TSX Micro
|
TSX Premium
|
TSX Quantum
|
|
Particularites et caracteristiques
|
0 compact
0 rapide
0 convient pour les petits
automatismes
0 E/S TOR = 24
|
0 compact
0 modulaire
0 jusqu'à 248 E/S TOR `'in rack»
0 programmation : langage Grafcet
|
0 architecture distribuée
0 modulaire
0 jusqu'à 2048 E/S `'in rack»
0 langage Grafcet
|
0 architecture modulaire et évolutive
0 sur châssis unique 448 E/S
|
|
besavantages
|
Langage :
0 Ladder
0 List
(inadapté au langage Grafcet)
|
7 lignes maximum pour un réseau de contacts
|
0
|
0
|
Nous choisissons la gamme TSX Premium et ceci
pour des raisons suivantes :
- Le nombre d'entrées / sorties élevé (25
entrées et 17 sorties)
- Il utilise le langage de programmation de type Grafcet qui
nous permettra d'assurer les dépannages dans les meilleures
conditions
- Nous disposons au sein du laboratoire d'automatique et
de productique de l'Ecole Nationale Supérieure
Polytechnique d'un TSX premium pour des essais et simulation.

2. Presentation
Les automates TSX Premium sont entièrement modulaires. Une
station automate est construite à partir des éléments de
base suivants : [3]
o Racks (standard ou extensibles),
Les racks TSX RKY... constituent
l'élément de base des automates TSX Premium. Deux familles de
racks sont proposées en 3 modularités (6,8 et 12 positions).
n Modules alimentation,
Les alimentations se présentent sous la forme de modules
et sont choisies en fonction du réseau distribué (continu ou
alternatif) et de la puissance nécessaire :
Le module alimentation TSX PSY .... est
destiné à l'alimentation de chaque rack TSX
RKY... et des modules.
n Modules processeur,
Chaque station automate est pourvue d'un processeur, choisi en
fonction de la puissance de traitement nécessaire. Un module processeur
TSX P57.. s'implante sur un rack TSX RKY ...
en position 00 ou 01 selon que le rack est
équipé d'un module alimentation de type standard ou double
format.
NB : le rack sur lequel est implanté le
processeur a toujours l'adresse 0.
o Entrées/sorties TOR,
Les modules E/S TOR du TSX Premium sont au format standard (1
position). Ils se positionnent indifféremment sur le rack standard ou
sur un rack extensible.
Une large gamme d'entrées et de sorties tout ou rien (TOR)
permet de répondre aux besoins rencontrés au niveau :
· Fonctionnel : entrées/sorties continus ou
alternatives, logique positive ou négative,
· Raccordement par borniers à vis ou connecteurs
HE10,
· Modularité : 8, 16, 32, 64 voies/module
o Entrées/sorties analogiques,
Les modules d'entrées/sorties analogiques de l'offre TSX
57 sont des modules au format standard (qui occupent une seule position),
équipés soit d'un connecteur SubD 25 points (TSX AEY 800), soit
de deux connecteurs SubD 25 points (TSX AEY 1600), soit d'un bornier à
vis (TSX AEY 414 et TSX ASY 410).
Ils peuvent être implantés dans toutes les positions
des racks TSX RKY.., à l'exception de la première position
réservée à l'alimentation du rack.

o Modules métiers (comptage, commande
d'axes, commande pas à pas, communication, pesage, ventilation).
3. Configuration materielle
Notre station automate sera constituée :
· 1 rack standard 6 positions : TSX RKY
6
· 1 processeur : TSX P57 352M
Capacité de traitement:
- 1024 E/S TOR
- 128 E/S analogiques
- 32 voies metier
Capacité mémoire
- intégrée processeur : 80 K mots
- extension PCMCIA : 256 K mots maximum
· 1 module d'entrées `'Tout ou Rien»
- Type du module : entrées à connecteurs -
Modularité : 32 entrées
- Tension : 24 VCC
- Logique positive
- Raccordement : connecteurs HE 10 Référence :
TSX DEY 32D2K
· 1 module de sorties `'Tout ou Rien»
- Type du module : soties statiques à connecteurs
- Modularité : 32 sorties
- Tension : 24 VCC
- Courant puissance : 0,1 A
- Logique positive
- Raccordement : connecteurs HE 10 Référence :
TSX DSY 32T2K
· 1 module d'alimentation
La puissance nécessaire à l'alimentation de chaque
rack TSX RKY est fonction du type et du nombre de modules implantés dans
celui-ci. De ce fait, il est nécessaire d'établir un bilan de
consommation rack par rack afin de définir le module d'alimentation TSX
PSY adapté à chaque rack.

Tableau 11: Bilan de consommation
Référence
|
Consommation en mA
|
puissance
(W)
|
|
tension continue 24 V
|
|
TSX P57 352M
|
500
|
-
|
2,5
|
Entrées "Tout ou Rien"
|
TSX DEY 32D2K
|
135
|
160
|
4,515
|
Sorties "Tout ou Rien"
|
TSX DSY 32T2K
|
140
|
-
|
0,7
|
Total 7,715
|
|
D'après ce tableau, la puissance nécessaire est de
7,72 W.
Nous choisissons de préférence un module
alimenté à partir d'un réseau à courant alternatif
et possédant une alimentation capteur 24 VCC.
Référence : TSX PSY 2600M
Alimentation : 100...240 VCA
Puissance utile totale : 26 W
Accessoires
Une pile de sauvegarde mémoire RAM interne
Référence : TSX PLP 01
NB : Tension continue 5 V destinée
à l'alimentation des modules TSX Premium Tension
continue 24 V destinée à l'alimentation des capteurs
d'entrées

Tableau 12: TSX Premium

4. Codage des entrees sorties de l'automate
L'adressage des voies est géographique ;
c'est-à-dire qu'il dépend :
· De l'adresse du rack,
· De la position physique du module dans le rack,
La syntaxe de l'adresse d'une entrées / sortie TOR est la
suivante :
Tableau 13: Codage des entrées / sorties automate
[3]
|
%
|
|
I ou Q
|
|
adresse
rack x
|
|
position
module y
|
|
.
|
|
numéro
de voie i
|
|
Symbole
|
|
I = entrée
Q = sortie
|
|
x = 0 à 7
|
|
y = 00 à 10
|
|
Point
|
|
i = 0 à 63
|
Exemples :
(1) %Q7.3 signifie : sortie 3 du module placé en position
07 dans rack 0
(2) %I102.5 signifie : entrée 5 du module placé en
position 02 dans rack adresse 1 Application
Le module d'entrées sera en
position 01 et le module de sorties en
position 02.
5. Configuration logi cielle
Comme plusieurs automates disponibles sur le marché,
l'automate TSX Premium de la société
Télémécanique possède son propre logiciel de
programmation.
Le logiciel de programmation utilisé ici est le
PL7 Pro V3.1
Apres le démarrage du logiciel, nous créons une
nouvelle application de nom `'TRANCHEUSE»
|
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
|
64
|
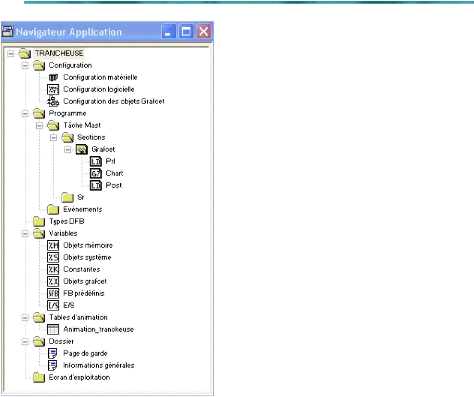
Figure 26: Navigateur d'application
Une configuration matérielle est nécessaire car
elle assure l'interface et la cohérence entre l'environnement externe et
l'application logicielle.
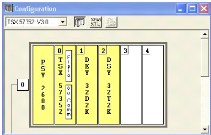
Figure 27: Configuration matérielle
La configuration logicielle permet d'ajuster les
éléments logiciels tels que temporisateur, compteur ... aux
besoins de l'application. En effet il n'est pas nécessaire que le
processeur scrute des éléments qui ne sont pas utilisés
par le programme, gain de temps d'exécution.

Figure 28:Configuration logicielle
6. Programmation sous PL7 Pro
6.1 Procedure pour une programmation sous PL7
Pro
1) La première étape, consiste à
transformer le GRAFCET de manière à ce qu'il soit
compréhensible par l'automate. En langage automate on appelle cette
étape « CHART ».
2) La deuxième étape consiste à traiter les
transitions. On appelle cette partie PRELIMINAIRES.
3) La troisième consiste à affecter les sorties
correspondantes aux étapes de notre GRAFCET. Cette partie est
appelée POSTERIEUR.
4) La quatrième et dernière étape consiste
à faire « dérouler » le GRAFCET. En effet, il faut
indiquer à l'automate quand passer d'une étape à
l'autre.
6.2 Table d'animation
Afin de suivre l'évolution des variables et de valider
le bon fonctionnement, il nous faut définir la table d'animation. Elle
est indispensable pour diagnostiquer les disfonctionnements durant la phase de
mise au point du programme.
6.3 E crans d'exploitation
La plate forme logicielle PL7 Pro propose aussi un outil de
conception d'écran d'exploitation du système automatisé.
Ces pages écrans constituent l'équivalent d'un terminal de
dialogue interactif.
7. Notion de cycle de s crutation
On appelle scrutation l'ensemble des
quatre opérations réalisées par l'automate et le
temps de scrutation est le temps mis par l'automate
pour traiter la même partie de programme.

1) Traitement interne
- surveillance de l'automate
- Détection RUN / STOP
- Echange avec le terminal de programmation
2) Acquisition des entrées
- écriture en mémoire de l'état des
informations présentes sur les entrées des modules TOR
3) Traitement du programme
- Traitement séquentiel des opérations logiques du
programme en utilisant l'état des entrées disponibles en
mémoire
4) Mise à jour des sorties
- affectation sur les sorties présentes sur les modules
TOR
8. Les objets adressables
Les objets booléens dits bits peuvent se résumer
comme suit :
· Bits d'entrée/sortie : %I, %Q
sont les images des bornes d'entrées et de sorties.
· Bits internes %M : permettent de
mémoriser les états intermédiaires durant
l'exécution du programme.
· Bits système %S : qui indiquent
les états de l'automate ou permettent d'agir sur le fonctionnement de
celui-ci.
· Bits de blocs fonctions :
temporisateurs, compteurs, monostables, registres à décalages,
séquenceurs.
· Bits d'état des étapes Grafcet :
%X qui mémorisent l'état des étapes actives ou
inactives.
Récapitulatif des bits système
|
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
|
67
|
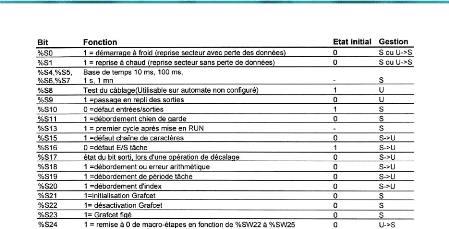
Tableau 14: Bits système
U : géré par l'utilisateur
S : géré par le système
U->S : mise à 1 par U, mise à zéro par
S
S->U : mise à 1 par S, mise à zéro par U
II. Mise en oeuvre des sequences du systeme automatise 1.
Entrees API
Tableau 15 : Entrées API
|
Mnetnoniques
|
Affectation API
|
|
bp1
|
I1.0
|
|
bp2
|
I1.1
|
|
bp3
|
I1.2
|
|
bp4
|
I1.3
|
|
bp5
|
I1.4
|
|
bp6
|
I1.5
|
|
bp7
|
I1.6
|
|
bp8
|
I1.7
|
|
bp9
|
I1.8
|
|
bp10
|
I1.9
|
|
bp11
|
I1.10
|
|
bp12
|
I1.11
|
|
bp13
|
I1.12
|
|
bp14
|
I1.13
|
|
bp15
|
I1.14
|
|
bp16
|
I1.15
|
|
ph
|
I1.16
|
|
pr
|
I1.17
|
|
fc1
|
I1.18
|
|
fc2
|
I1.19
|
|
fc3
|
I1.20
|

|
Mnemoniques
|
Affectation API
|
|
nv
|
I1.21
|
|
Pa
|
I1.22
|
|
Kmly
|
I1.23
|
|
AUl
|
I1.24
|
NB :
Pr : pressostat
2. Sorties API
Tableau 16 : Sorties API
|
Mnemoniques
|
Affectation API
|
|
Km4 - v4
|
Q2.0
|
|
Kml2
|
Q2.1
|
|
KmlY
|
Q2.2
|
|
Kmla - v5
|
Q2.3
|
|
Km2 - Km7 - v2
|
Q2.4
|
|
Km3
|
Q2.5
|
|
Km9d
|
Q2.6
|
|
Km99
|
Q2.7
|
|
Km5d - v8
|
Q2.8
|
|
Km59
|
Q2.9
|
|
Km6
|
Q2.10
|
|
Km8 - v7
|
Q2.11
|
|
3b
|
Q2.12
|
|
lb+
|
Q2.13
|
|
lb-
|
Q2.14
|
|
2b - v3
|
Q2.15
|
|
4b
|
Q2.16
|
3. Grafcet point de vue API 3.1 Grafcet
principal
|
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
|
69
|
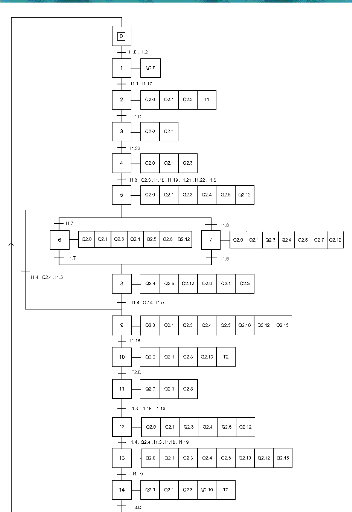
Figure 29: Gracet principal point de vue API
|
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
|
70
|

3.2 Grafcet chariot
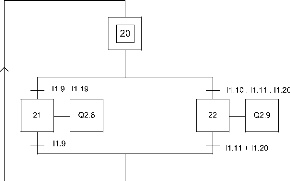
Figure 30: Grafcet 3 chariot
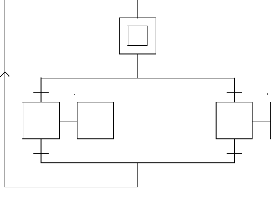
3.3 Grafcet grandes griffes
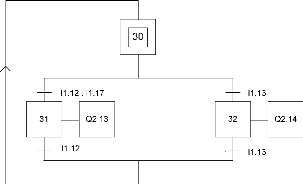
Figure 31: Grafcet 3 grandes griffes
3.4 Grafcet table elevatrice
|
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
|
71
|
Programmation des sequences de fonctionnement et cablage
entrees / sorties

40
I1.14
I1.15
41
Q2.11
42
I1.14
Figure 32 : Grafcet 3 table
élévatrice
I1.15
Q2.16
3.5 Programmation des sequences sous PL7 Pro
Voir annexe pour la programmation des séquences de
fonctionnement sous PL7 Pro. 3.6 Traitement sur Coupure et Reprise Se
cteur
Lors d'une coupure du secteur, le bit %S1 se positionne à
1.
Pour réinitialiser toutes les variables lors du retour du
secteur, le bit %S1 doit positionner à 1 par programme le bit %S0.

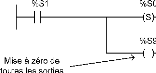
Figure 33 : Traitement sur coupure et reprise
secteur
%S1 et %S0 sont remis à zéro automatiquement
après une scrutation complète du programme.
Programmation des sequences de fonctionnement et cablage
entrees / sorties

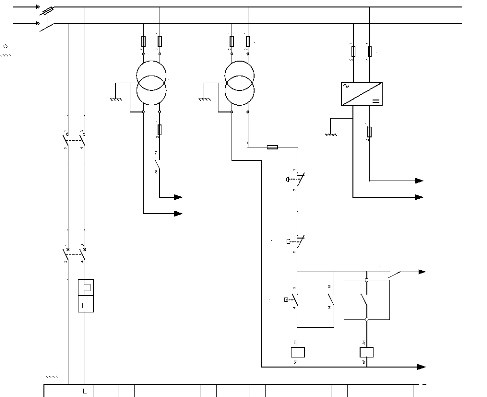
III. Cablage des entrees / sorties
1. Alimentation de l'automate
L'automate sera alimenté par le réseau
monophasé 230V ; 50 Hz. La protection sera de type
magnéto-thermique.
Il est souhaitable d'asservir l'alimentation de l'automate par un
circuit de commande spécifique (contacteur KM0).
De même, les sorties seront asservies au circuit de
commande et alimentées après validation du chien de garde
(vérification du temps de scrutation à chaque cycle automate).
PE
L1
N
1
3
PE
4
2
1
2
3
7 F3
7 2 x F2
7 KA1
230 / 110 V
4
7 T1
e
Alimentation
commande
f
5
6
7
8
7 2 x F4
9
230 / 24 V
1 2
7 F5
7 T2
7 KM0
7 S2
7 Bcp
10
7 S1
11
12
7 KM0
13
7 KA1
14
15
Chien de
garde
16
7 2 x F6
7 F7
13 14
17
7 KA1
AL
18
24 VDC
d
Vers sorties
automate
Alimentation
commande
7 Q1
7 KM0
7 Q2
N
I >
a
b
c
Alimentation de l'automate Sorties automate
Alimentation de l'automate
Sorties automate
AUTOMATE
Alimentation des capteurs
0 V 24 V
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
Entrées automate


|
Figure 34: Alimentation automate
|
|
|
|
|
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
|
73
|

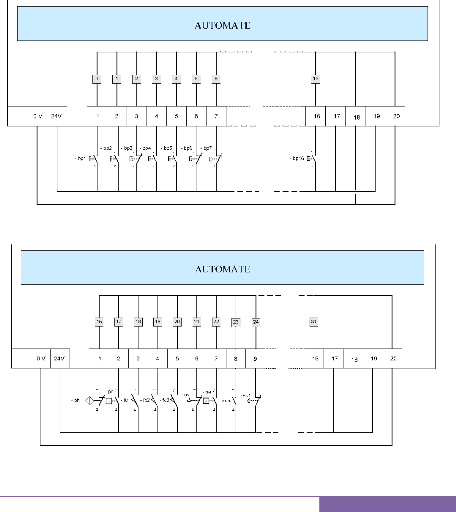
2. Alimentation des entrees de l'automate
Le module TSX DEY 32D2K comporte des entrées
alimentées en 24 VCC et est équipé de 2 connecteurs HE10
male : [3]
Connecteurs A et B associés au raccordement des
entrées :
A (0 à 15)
74
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
Figure 35: Entrées connecteur A
Figure 36: Entrées connecteur B
B (16 à 31)
Programmation des sequences de fonctionnement et
cablage entrees / sorties

3. Alimentation des sorties de l'automate :
Le module TSX DSY 32T2K comporte des sorties statiques de type
source logique positive et équipé
de connecteurs HE10 male : [3]
connecteur A pour les sorties 0 à 15
connecteur B pour les sorties 16 à 31 Nous avons que
représenté le connecteur A
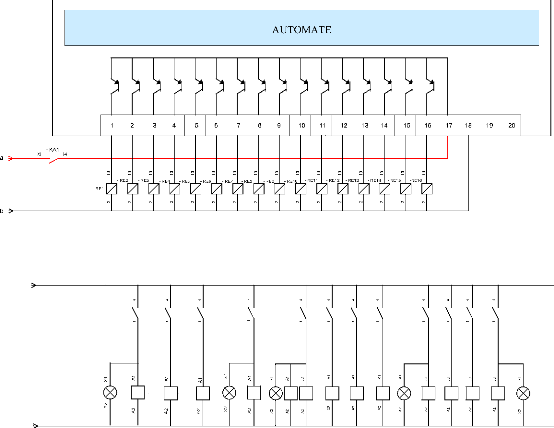
Figure 37: Sorties connecteur A
7 RE1 7 RE2 7 RE3 7 RE4 7 RE5 7 RE6 7 RE7 7 RE8 7 RE9 7 RE10 7
RE11 7 RE12
7 KM4
7 KM1L
7 H4
7 KM1Y
7 H5
7 KM1.
7 H2
7 KM7 7 KM2
7 KM3
7 KM9D
7 KM9G
7 H8
7 KM5D
7 KM5G
7 KM6
7 KM8
7 H7
d
c
Figure 38 : Alimentation bobines contacteurs et
voyants
|
Rédigé par TCHIEGANG MBITCHA Alain Bertrand
|
75
|
Programmation des sequences de fonctionnement et cablage
entrees / sorties
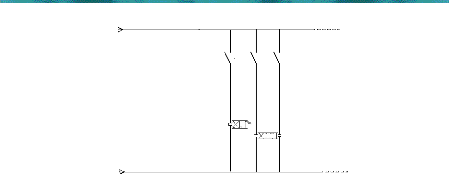
7 RE13
1 4
7 RE14 7 RE15
1 4
f
e
4
Figure 39: Alimentation bobines distributeurs
Conclusion :
Au terme de ce chapitre, nous avons choisi l'automate
programmable qui remplacera la partie commande de notre système. La
programmation des séquences de fonctionnement a été faite
avec le logiciel PL7 Pro. Par ailleurs nous avons réalisé les
schémas pour l'alimentation de l'automate, ses entrées et ses
sorties. Le prochain chapitre porte sur la simulation de l'automatisme

Chapitre
7
| 

