|
Évaluation des performances d'un design d'avion de type
blended-wing-body de 100 passagers
par
Cédric FOFFÉ NGOUFO
RAPPORT DE PROJET PRÉSENTÉ À
L'ÉCOLE DE TECHNOLOGIE
SUPÉRIEURE COMME EXIGENCE PARTIELLE
À L'OBTENTION DE
LA MAÎTRISE AVEC PROJET EN GÉNIE
AÉROSPATIAL
M. ING.
MONTRÉAL, LE 06 AOÛT 2021
ÉCOLE DE TECHNOLOGIE
SUPÉRIEURE
UNIVERSITÉ DU QUÉBEC
Cédric FOFFÉ NGOUFO, 2021

Cette licence Creative Commons signifie qu'il est
permis de diffuser, d'imprimer ou de sauvegarder sur un autre support une
partie ou la totalité de cette oeuvre à condition de mentionner
l'auteur, que ces utilisations soient faites à des fins non commerciales
et que le contenu de l'oeuvre n'ait pas été modifié.
PRÉSENTATION DU JURY
CE RAPPORT DE PROJET A ÉTÉ ÉVALUÉ PAR
UN JURY COMPOSÉ DE :
M. François Morency, directeur de projet
Département de génie mécanique à
l'École de technologie supérieure
M. Stéphane Hallé, membre du jury
Département de génie mécanique à
l'École de technologie supérieure

REMERCIEMENTS
Ce projet n'aurait pas été parachevé sans le
soutien de plusieurs personnes à qui je souhaite témoigner ma
reconnaissance.
Je tiens tout d'abord à exprimer mes remerciements les
plus sincères à mon directeur de projet, le Professeur
François Morency pour la confiance qu'il m'a accordée et pour
m'avoir suivi, guidé et aidé avec patience tout au long de ce
travail.
Mes remerciements vont également à l'endroit de
Kevin Ignatowicz et Velazquez Salazar du Laboratoire de Thermo-Fluide pour le
Transport (TFT) de l'ÉTS, pour leur aide indéfectible durant la
réalisation de ce projet.
Il n'y a pas de mots pour dire merci à ma famille,
particulièrement à mon épouse et mes frères, qui
m'ont soutenu et encouragé pendant tout ce temps.

Évaluation des performances d'un design d'avion
de type
blended-wing-body de 100 passagers
Cédric FOFFÉ
NGOUFO
RÉSUMÉ
Le Blended Wing Body (BWB) est un modèle d'avion dont
le fuselage classique en forme de tube a été remplacé par
un profil d'aile. Avec cette configuration, de nombreux travaux scientifiques
ont montré que ces avions promettent une baisse considérable de
la consommation en carburant et un impact environnemental moindre. Cependant,
la plupart des travaux existants menés sur les avions de ligne de type
BWB se basent prioritairement sur des versions long-courriers; pourtant, les
études de marché actuelles montrent un besoin croissant de la
demande d'aéronefs moyen-courrier de capacité entre 100 et 150
passagers (Velazquez, 2020). Pour cette raison, le laboratoire TFT de
l'ÉTS a initié le projet de conception d'un avion régional
de type BWB ayant une capacité d'emport de 100 passagers. Ainsi, dans le
cadre de ses travaux sur l'analyse aérodynamique à basse vitesse
du BWB, Velazquez a proposé un design initial de l'appareil, tandis que
Delacroix en a étudié la stabilité. S'inscrivant dans une
logique de continuité, l'objectif de ce travail était
d'évaluer les performances à basse vitesse et en croisière
du BWB obtenu des travaux de Velazquez (2020) et de Delacroix (2017). Les
préalables à cet objectif ont été d'estimer la
masse de l'avion puis de dimensionner le système de propulsion, les
surfaces verticales et le train d'atterrissage.
Ainsi, à l'aide des relations semi-empiriques de
prédiction détaillée de la masse des aéronefs
développées par divers auteurs, la masse maximale de l'avion a
été estimée à 41950 kg, soit environ 20,2% et 6,3%
de moins que les prédictions réalisées par Delacroix
(2017) et Velazquez (2020) respectivement. Ensuite, à l'aide de la
relation de Mattingly (1987), la poussée maximale que devrait
développer les moteurs a été estimée à 168
kN, soit 13,0% de moins que l'estimation faite par Velazquez (2020). Pour ce
qui est du design de la surface verticale, la solution retenue a
été d'opter pour un double empennage vertical placé
à la queue du fuselage. La validation de ces surfaces verticales devrait
faire l'objet d'une analyse de stabilité dynamique. Concernant le train
d'atterrissage, la configuration de train rétractable type tricycle (tel
que pour le CRJ1000) a été adoptée. Les dimensions largeur
et diamètre des roues principales et de nez ont été
évaluées.
Pour ce qui est des performances de l'appareil, une
évaluation détaillée des distances de décollage et
d'atterrissage a révélé que le BWB décollerait sur
une distance de 30% moins longue que le CRJ1000 de Bombardier ou encore
l'Antonov An-158. Sa distance d'atterrissage cependant reste assez proche de
celle du CRJ1000. Par ailleurs, pour que l'avion puisse voler à la
vitesse de 230 m/s comme exigé dans les requis du design, l'altitude de
croisière idéale
VIII
serait de 13,9 km. Pour finir, le centrage des masses et
l'analyse de la stabilité de l'avion a permis d'aboutir à un
design stable du BWB avec les moteurs installés sous l'aile. Avec cette
configuration l'avion présente une marge statique de 9,01% à
MTOW, 6,12% à OEW et 10,0% à MZFW, ce qui est acceptable au
regard de la réglementation de la FAA qui préconise 5% de marge
statique au moins pour un avion de ligne.
Mots clés : blended-wing-body, design
d'aéronefs, performances d'avion, propulsion, stabilité
statique.
Performance evaluation of a 100-passenger
blended-wing-body aircraft
Cédric FOFFÉ NGOUFO
ABSTRACT
The Blended Wing Body (BWB) is an aircraft model whose classic
tube-shaped fuselage has been replaced by a wing profile. With this
configuration, numerous scientific works have shown that these planes promise a
considerable reduction in fuel consumption and a lower environmental impact.
However, most of the existing work carried out on BWB type airliners is
primarily based on long-haul versions; however, current market studies show a
growing demand for medium-haul aircraft with capacities between 100 and 150
passengers (Velazquez, 2020). For this reason, the ETS's TFT laboratory
initiated the design project for a regional BWB type aircraft with a carrying
capacity of 100 passengers. Thus, as part of his work on the low-speed
aerodynamic analysis of the BWB, Velazquez proposed an initial design of the
aircraft, while Delacroix studied its stability. As part of a continuity logic,
the objective of this work was to assess the low speed and cruising performance
of the BWB obtained from the work of Velazquez (2020) and Delacroix (2017).
This objective's prerequisites were to estimate the mass of the aircraft and
then to size the propulsion system, the vertical surfaces and the landing
gear.
Therefore, using the detailed prediction equations for the
mass of aircraft developed by various authors, the maximum mass of the aircraft
was estimated at 41,950 kg, which is approximately 20.2% and 6.3% less than the
predictions made by Delacroix (2017) and Velazquez (2020) respectively. Then,
using the relation of Mattingly (1987), the maximum thrust that the engines
should develop was estimated at 168 kN, which is 13.0% less than the estimate
made by Velazquez (2020). Regarding the design of the vertical surface, the
solution adopted was to opt for a vertical double tail unit placed at the tail
of the fuselage. The validation of these vertical surfaces should be subjected
to a dynamic stability analysis. Regarding the landing gear, the tricycle type
retractable gear configuration (such as for the CRJ1000) was adopted. The width
and diameter dimensions of the main and nose wheels were evaluated.
As for the aircraft's performance, a detailed assessment of
take-off and landing distances revealed that the BWB would take off on a 30%
shorter distance than Bombardier's CRJ1000 or the Antonov An-158. Its landing
distance, however, remains fairly close to that of the CRJ1000. Furthermore,
for the aircraft to fly at a speed of 230 m / s as required in the design
specification, the ideal cruising altitude would be 13.9 km. Finally, weight
centering and analysis of the aircraft's stability resulted in a stable design
of the BWB with the engines installed under the wing. With this configuration,
the aircraft has a static margin of 9.01% at
X
MTOW, 6.12% at OEW and 10.0% at MZFW, which is acceptable with
regard to FAA regulations which recommend a 5% margin static at least for an
airliner.
Keywords: blended-wing-body, aircraft design, aircraft
performance, propulsion, static stability.
TABLE DES MATIÈRES
INTRODUCTION 1
CHAPITRE 1 REVUE DE LA LITTÉRATURE 3
1.1. Le BWB : Concept et évolution 3
1.1.1. Concept d'avion Blended Wing Body 3
1.1.2. Prototypes d'avions Blended Wing Body 5
1.2. Présentation du design de Blended-Wing-Body
étudié 13
1.2.1. Paramètres critiques et de conception 13
1.2.2. Géométrie de l'avion 14
1.2.3. Résumé des performances de l'aéronef
15
1.2.4. Masse des précédents designs de l'avion
16
CHAPITRE 2 MÉTHODOLOGIE DE PRÉDICTION DE
LA MASSE ET DES
PERFORMANCES DU BWB 19
2.1. Requis de la mission 19
2.1.1. Segment de mission à satisfaire par le BWB 19
2.1.2. Caractéristiques attendues de l'avion 20
2.2. Méthodologie de prédiction
détaillée de la masse de l'avion 21
2.2.1. Algorithme de calcul de la masse du BWB 21
2.2.2. Prédiction de la masse à vide de l'avion
23
2.3. Dimensionnement du groupe de propulsion 36
2.3.1. Poussée maximale des moteurs 36
2.3.2. Poids et dimensions des moteurs 38
2.3.3. Altitude de vol au maximum de distance 39
2.4. Design de la surface verticale et du train d'atterrissage
40
2.4.1. Design de l'empennage vertical 40
2.4.2. Design du train d'atterrissage 45
2.5. Estimation du coefficient de trainée à
portance nulle du BWB 48
2.5.1. Inventaire des sources de trainée 48
2.5.2. Estimation du coefficient de trainée parasite d'un
élément 49
2.6. Estimation des performances de l'avion 52
2.6.1. Estimation des distances de décollage et
d'atterrissage 52
2.6.2. Performance en montée et en descente 58
2.6.3. Facteur de charge et domaine de vol de l'avion 60
2.7. Équilibre et stabilité de l'avion 61
2.7.1. Notions de stabilité d'un avion 61
2.7.2. Marge statique et conditions de stabilité 62
2.7.3. Coefficient de moment et équilibre de l'avion 63
CHAPITRE 3 RÉSULTATS ET DISCUSSIONS 69
3.1. Résultats de l'évaluation de la masse du BWB
69
3.2. Coefficient de trainée à portance nulle du BWB
72
XII
3.3. Performance de la propulsion 74
3.3.1. Altitude de croisière pour une distance maximale
74
3.3.2. Poussée requise et poussée disponible en
croisière 75
3.3.3. Performance et dimension des moteurs 76
3.4. Caractéristiques et positionnement des surfaces
verticales 77
3.5. Type et dimensions du train d'atterrissage 80
3.6. Performances au décollage et à
l'atterrissage 81
3.7. Performances en montée et en descente 83
3.7.1. Performances pendant la montée du BWB 83
3.7.2. Performances pendant la descente 84
3.8. Facteur de charge et domaine de vol du BWB 84
3.9. Synthèse des spécifications
générales du BWB 86
CHAPITRE 4 CENTRAGE ET STABILITÉ DU BWB 89
4.1. Centrage des masses du BWB 89
4.1.1. Méthodologie de détermination du centre
de masse de l'avion 89
4.1.2. Détermination du centre de gravité du BWB
90
4.1.3. Positionnement du centre de gravité sur l'avion
93
4.2. Point neutre et stabilité statique du BWB 94
4.2.1. Détermination du point neutre du BWB 94
4.2.2. Analyse de la stabilité statique du BWB 103
CONCLUSION 113
LISTE DE RÉFÉRENCES BIBLIOGRAPHIQUES 125
LISTE DES TABLEAUX
Page
Tableau 1.1 : Caractéristiques de quelques BWB
conçus et testés 12
Tableau 1.2 : Paramètres critiques du BWB (Velazquez,
2020) 13
Tableau 1.3 : Paramètres géométriques du
BWB (Velazquez, 2020) 15
Tableau 1.4 : Paramètres aérodynamiques du BWB
(Velazquez, 2020) 16
Tableau 1.5 : Performances en croisière du BWB
(Velazquez, 2020) 16
Tableau 1.6 : Performance à basse vitesse du BWB
(Velazquez, 2020) 16
Tableau 1.7 : Masse détaillée du BWB,
prédite par Delacroix (2017) et Velazquez (2020) 17
Tableau 2.1 : Exigences de la mission (Velazquez, 2020) 20
Tableau 2.2 : Valeurs typiques des fractions de masse par
segment (Raymer, 2006) 21
Tableau 2.3 : Références du calcul
détaillé de la masse de l'avion 24
Tableau 3.1 : Prédiction de masse
détaillée du BWB 70
Tableau 3.2 : Répartition de la masse du BWB 71
Tableau 3.3 : Synthèse des résultats de calcul
du coefficient de trainée à portance nulle 73
Tableau 3.4 : Vitesses caractéristiques du BWB en
croisière 75
Tableau 3.5 : Performances des moteurs du BWB
(turbosoufflante) 76
Tableau 3.6 : Poids et dimensions d'un moteur 77
Tableau 3.7 : Données du design 78
Tableau 3.8 : Résultats du design de la surface
verticale 78
Tableau 3.9 : Dimensions des roues du train d'atterrissage
81
Tableau 3.10 : Données de calcul des distances de
décollage et d'atterrissage 81
Tableau 3.11 : Distances de décollage et d'atterrissage
du BWB 82
XIV
Tableau 3.12 : Synthèse des caractéristiques
générales du BWB 86
Tableau 4.1 : Localisation du centre de gravité du BWB
(moteurs à l'arrière du fuselage) 92
Tableau 4.2 : Données de paramètres
géométriques de l'avion 99
Tableau 4.3 : Localisation des centres aérodynamiques
du corps central et de l'aile
extérieure 100
Tableau 4.4 : Droites de portance et point neutre du BWB
101
Tableau 4.5 : Marge statique du BWB (moteurs à
l'arrière du fuselage) 104
Tableau 4.6 : Coefficient de moment du BWB (moteurs à
l'arrière du fuselage) 104
Tableau 4.7 : Localisation du centre de gravité du BWB
(moteurs sous l'aile) 107
Tableau 4.8 : Marge statique du BWB (moteurs sous l'aile)
108
Tableau 4.9 : Coefficients de moment du BWB (moteurs sous
l'aile) 109
LISTE DES FIGURES
Page
Figure 1.1 : Northrop YB-35, bombardier long-courrier (Rose,
2010) 6
Figure 1.2 : Bombardier furtif B-2A Spirit (Rose, 2010) 7
Figure 1.3 : Géométrie de base du Boeing BWB-450
(Liebeck, 2004) 8
Figure 1.4 : Prototype BWB X-48B (Gibbs, 2017) 9
Figure 1.5 : Prototype BWB X-48C (Creech et al, 2013) 10
Figure 1.6 : Prototype BWB AC 20.30 (Thomas et al, 2013) 11
Figure 1.7 : Prototype du BWB MAVERIC de Airbus (MAVERIC,
2020b) 12
Figure 1.8 : Sections finales du BWB (Velazquez, 2020) 14
Figure 1.9 : Configuration de la cabine (Velazquez, 2020)
15
Figure 2.1 : Segment de la mission (adapté de
Torenbeek, 2013) 20
Figure 2.2 : Vue en plan de la géométrie
simplifiée du BWB (Bradley, 2004) 26
Figure 2.3 : Procédure de design la surface verticale
(adapté de Sadraey, 2012) 42
Figure 2.4 : Paramètres d'empennage vertical (Sadraey,
2012) 43
Figure 2.5 : Positionnement longitudinal du train
d'atterrissage par rapport au centre de
gravité (Howe, 2000) 46
Figure 2.6 : Positionnement transversal et vertical du train
d'atterrissage par rapport au centre
de gravité (Howe, 2000) 46
Figure 2.7 : Schéma d'illustration des phases de
décollage (Corke, 2003) 53
Figure 2.8 : Schéma d'illustration des phases
d'atterrissage (Corke, 2003) 56
Figure 2.9 : Variation du coefficient de moment avec l'angle
d'attaque (cas stable) 64
Figure 3.1 : Altitude requise en croisière en fonction
de la vitesse 74
Figure 3.2 : Courbe Poussée-Vitesse du BWB 75
XVI
Figure 3.3 : Vue multiple du BWB, moteurs en arrière du
fuselage 79
Figure 3.4 : Vue de dessus du BWB, moteurs et surfaces
verticales placés 80
Figure 3.5 : Courbe de variation du taux de montée du
BWB 83
Figure 3.6 : Courbe de variation du taux de descente du BWB
(moteurs éteints) 84
Figure 3.7 : Diagramme V-n du BWB, à altitude de
croisière 85
Figure 4.1 : Positionnement du centre de gravité du BWB
93
Figure 4.2 : Modèle simplifié du bilan des
forces appliquées à un BWB 94
Figure 4.3 : Localisation des centres aérodynamiques du
corps central et de l'aile 96
Figure 4.4 : Droite de portance du BWB 102
Figure 4.5 : Comparaison entre les droites de portance
analytique et CFD du BWB 103
Figure 4.6 : Variation du coefficient de moment du BWB
(moteurs à l'arrière du fuselage)
105
Figure 4.7 : Variation du coefficient de moment du BWB
(moteurs sous l'aile) 109
Figure 4.8 : Vue isométrique du design final du BWB
110
Figure 4.9 : Vues de face et de gauche du design final du BWB
111
LISTE DES ABRÉVIATIONS, SIGLES ET
ACRONYMES
2D Deux dimensions
3D Trois dimensions
AR Arrière
AV Avant
BFL Balanced Field Length
BPR Bypass Ratio
BWB Blended-Wing-Body
CAD Computer Aided Design
CB Centerbody
CFD Computional Fluid Dynamics
CG Center of Gravity
ÉTS École de Technologie Supérieure
FAA Federal Aviation Administration
FAR Federal Aviation Regulations
ISA International Standard Atmosphere
LE Leading Edge
MAC Mean Aerodynamic Chord
MAVERIC Model Aircraft for Validation and Experimentation of
Robust Innovative Controls
MEW Maximum Empty Weight
MFW Maximum Fuel Weight
MLW Maximum Landing Weight
MTOW Maximum Take-Off Weight
MZFW Maximum Zero-Fuel Weight
NACA National Advisory Comity for Aeronautics
OEW Operating Empty Weight
OW Outer Wing
PAX Passagers
RAC Règlement de l'Aviation Canadien
XVIII
RANS Reynolds Averaged Navier-Stokes
SL Sea Level
SM Static Marge
TAW Tube-And-Wings
TFT Laboratoire de Thermofluide pour le Transport
TOL Take-off and Landing
TSFC Thrust Specific Fuel Consumption
TW Transition Wing
VELA Very Efficient Large Aircraft
LISTE DES SYMBOLES ET UNITÉS DE MESURE
Pente de portance du profil d'aile (2D) [rad-1]
Angle d'attaque [deg ou rad]
Angle d'incidence à portance nulle [deg ou rad]
Allongement [-]
Envergure de l'aile [m]
Corde de l'aile [m]
Corde moyenne aérodynamique [m]
Coefficient global de traînée (3D) [-]
Coefficient de trainée du profil d'aile (2D) [-]
Coefficient de traînée à portance nulle (3D) [-]
Coefficient de friction de la plaque plane [-] Coefficient global
de portance (3D) [-]
Coefficient de portance du profil d'aile (2D) [-] Pente de
portance de l'aile complète (3D) [rad-1]
Dérivée du coefficient de portance par rapport à l'angle
d'attaque [-] Coefficient global de portance maximal (3D) [-]
C l max
Coefficient de portance maximal du profil d'aile (2D) [-]
C m 0
CM
CM ? Cm
?
D
CV
Coefficient de moment à portance nulle [-]
ou Coefficient global de moment [-]
ou Dérivée du coefficient de moment par rapport
à l'angle d'attaque [-]
Coefficient de volume d'empennage vertical [-] Résultante
des forces de trainée[N]
XX
RC
Endurance [s]
1D Coefficient d'Oswald [-]
Facteur de forme [-]
Facteur de structure-usine (à vide) [-]
Facteur de structure opérationnel [-]
Accélération de la pesanteur [m/s2]
Gradient de montée [-] Angle de monté [deg]
Angle de descente [deg]
Altitude[m]
Coefficient d'efficacité d'envergure [-] Marge statique
[-]
? Résultante des forces de portance [N]
Finesse [-]
Re
Angle de flèche [deg ou rad]
Effilement [-]
Longueur entre les quarts de corde de l'aile extérieure et
de l'empennage vertical [m]
ou Nombre de Mach [-]
Moment [Nm]
Coefficient de friction de la piste [-] Facteur de charge [-]
Facteur d'interférence [-]
Rayon d'action [m] Taux de montée [m/s] Taux de descente
[m/s]
Nombre de Reynolds sur la longueur caractéristique [-]
Masse volumique de l'aire [kg/m3]
XXI
h Surface [m2]
Surface de référence ou surface alaire
[m2]
Surface mouillée [m2]
Force de poussée [kN]
Épaisseur relative du profil d'aile [-]
Ratio poussée/poids [-]
Vitesse [m/s]
Viscosité cinématique [m2/s] Poids ou
masse [N, kg ou lb] Charge alaire [kg/m2]
Coordonnée sur l'axe longitudinal de l'avion [m]
LISTE DES INDICES PARTICULIERS
ac Centre aérodynamique
bwb Blended-Wing-Body
cg Centre de gravité
climb Montée
cr Croisière
des Descente
eng Moteur (engine)
fus Fuselage
LE Bord d'attaque
main Principal
max Maximum
min Minimum
np Point neutre
r ou root Racine
ref Référence
stall ou s
Décrochage
t ou tip Extrémité
V ou VT Empennage vertical
INTRODUCTION
Depuis les années 1945 avec l'apparition des appareils
tels que le Lockheed Constellation, le Douglas DC-6,
Vickers Viscount ou encore le de Havilland Comet, la forme en
« tube et aile (TAW) » des avions de ligne n'a quasiment pas
changé (Reist et al, 2013). Toutefois, avec l'évolution de la
recherche dans les domaines aéronautique et spatial à l'instar de
l'aérodynamique, du calcul des structures, de
l'aéroélasticité et de l'informatique, ces appareils n'ont
cessé d'être améliorés. De manière
spécifique, les améliorations de performances des avions de ligne
conventionnels sont venues de modifications apportées à la
conception aérodynamique (utilisation d'ailettes et de profils
aérodynamiques supercritiques), à l'utilisation de
matériaux hautes performances et à la construction des moteurs
économes en carburant (Reist et al, 2013). Cependant, bien que les
concepteurs d'avions TAW s'appuient sur le retour d'expérience
acquis pendant de décennies de recherche sur cette configuration, il est
aujourd'hui peu probable que des gains significatifs puissent être
obtenus, à moins que des technologies radicalement nouvelles ne soient
utilisées (van et al, 2014). Les constructeurs aéronautiques et
la communauté scientifique réfléchissent donc à de
nouvelles configurations d'aéronefs à l'instar des avions
à fuselage intégré, plus connus sous le nom de Blended
Wing Body (BWB). Cette configuration d'avion présente une
efficacité aérodynamique élevée et des
caractéristiques respectueuses de l'environnement; c'est la raison pour
laquelle elle est généralement considérée comme
l'une des configurations présentant le plus de potentiel pour la
nouvelle génération d'avions civils (Liebeck, 2004 ; Okonkwo,
20016).
Dans l'optique d'apporter une contribution à la
recherche sur les BWB, un projet de conception d'un avion de ligne
moyen-courrier à fuselage intégré a vu le jour au
département de génie mécanique de l'École de
Technologie Supérieure, avec les travaux de Velazquez (2020) et
Delacroix (2017). Ces travaux ont conduit à l'obtention des premiers
designs conceptuels de l'avion, ainsi qu'à la détermination de
ses caractéristiques aérodynamiques (coefficient de
traînée à portance nulle, coefficient de portance, etc.).
Faisant suite aux travaux de ces derniers, ce projet a pour objectif de
compléter le design de l'avion d'une part et d'évaluation ses
performances à haute et à basse vitesse d'autre part.
Spécifiquement, le projet consistera à :
2
déterminer la masse détaillée de
l'appareil, dimensionner le groupe de propulsion, dimensionner les surfaces
verticales et le train d'atterrissage, estimer les distances de
décollage et d'atterrissage, évaluer les performances en
montée et en descente, déterminer le facteur de charge et le
domaine de vol, analyser la stabilité de l'appareil pour finir.
Afin de parachever les objectifs précédents, le
présent travail sera organisé en quatre chapitres s'articulant
comme suit :
Le chapitre 1 réservé à la revue de la
littérature permettra de présenter le concept de
Blended-Wing-Body (BWB), sa genèse et son évolution. Par la suite
le design du BWB objet de ce projet sera présenté. Le chapitre 2
intitulé « méthodologie de prédiction de la masse et
des performances du BWB » sera réservé à la
présentation de toutes les méthodes et démarches
utilisées dans ce travail pour estimer la masse de l'avion, dimensionner
le groupe de propulsion et l'empennage vertical d'une part, et d'autre part
évaluer les performances de l'appareil à basse et à haute
vitesse au regard de la mission et des requis à satisfaire. Le chapitre
3 sera réservé à la présentation et la discussion
des résultats de l'estimation de la masse de l'avion, du design du
groupe de propulsion et des surfaces verticales, puis de l'évaluation
des performances de l'appareil en comparaison avec les avions existants. Le
chapitre 4 pour finir traitera du centrage des masses et de l'analyse de la
stabilité statique de l'appareil, avec les moteurs, les surfaces
verticales et le train d'atterrissage positionnés. Par la suite, les
dessins du design actualisé de l'avion seront présentés et
commentés.
CHAPITRE 1
REVUE DE LA LITTÉRATURE
Le BWB (Blended Wing Body) est un concept d'avion dit à
fuselage intégré, de par le fait que contrairement aux avions
classiques à tube et aile, son fuselage est une aile à part
entière qui contribue à générer de la portance. Ce
chapitre a pour objectif de présenter les travaux antérieurs sur
les avions à fuselage intégré, afin de guider et de
positionner le design du BWB objet de ce travail. Ainsi, la première
partie du chapitre sera réservée à la présentation
du concept de BWB ainsi que son évolution. La seconde partie quant
à telle sera réservée à la présentation du
design de BWB faisant l'objet de ce projet.
1.1. Le BWB : Concept et évolution
Le BWB fait partir de la grande famille des avions
dépourvus d'empennage. Il est assimilable à une aile volante,
où l'épaisseur relative de la partie centrale a été
maximisée afin de permettre un volume important de charge utile.
1.1.1. Concept d'avion Blended Wing Body
Le concept d'avion Blended Wing Body (BWB) a été
développé dans le but de produire un avion respectueux de
l'environnement et économiquement plus rentable que les avions
classiques à tube et aile. En effet, les BWB promettent d'offrir des
avantages aérodynamiques importants comparativement aux avions
classiques, ce qui leur confère une réduction significative de la
consommation en carburant, avec une capacité d'emport plus importante.
(Liebeck, 2004). Le BWB a une signature à faible bruit, car il ne
nécessite pas de volets ou d'empennage pour le contrôle du
tangage, ce qui élimine le besoin de dispositifs hypersustentateurs au
décollage et à l'atterrissage (Okonkwo, 2016).
L'une des publications les plus importantes sur la conception
de l'avion BWB est certainement celle de Liebeck (2004). Il a travaillé
sur le concept de BWB dans la société McDonnell
4
Douglas initialement, puis l'a développé
ultérieurement dans ses travaux avec la NASA et Boeing conjointement.
Les avantages aérodynamiques du BWB viennent du fait
que son fuselage et son aile sont intégrés afin d'obtenir un
rapport de surface mouillée/volume moindre, et donc une réduction
de la trainée d'interférence. Cela réduit la
traînée totale et fournit une finesse L/D plus
élevée en croisière par rapport à la configuration
conventionnelle (Wan et al, 2010).
De même, Liebeck (2004) a comparé l'impact de la
réduction de la surface mouillée sur le coefficient de portance
d'un BWB de 800 passagers et d'un avion à tubes et aile conventionnel de
capacité similaire. Il a montré que par rapport à un avion
conventionnel, le BWB permet d'obtenir une réduction d'environ de 33 %
de la surface mouillée. Ce qui a pour effet direct de réduit la
traînée de l'avion, augmentant par conséquent la finesse
L/D de 10 à 15 % par rapport à une configuration conventionnelle
tubes et aile.
Ainsi, de par sa configuration unique et ses avantages
probables, le BWB est bien adapté au rôle d'avion de ligne
à longue portée et à grande capacité respectueux de
l'environnement. Cependant, les problèmes de contrôle et de
stabilité, de pressurisation de la cabine et de qualité de
pilotage de l'avion entre autres, doivent être résolus (Okonkwo,
2016).
Contraintes de design des BWB (Liebeck, 2004)
Dans ses travaux sur les BWB, Liebeck (2004) a
énuméré un ensemble unique d'exigences auxquelles doit
satisfaire la conception de l'appareil. Quelques de ces exigences sont
présentées dans les lignes qui suivent.
· Exigence de volume
Afin de garantir un espace suffisant pour accueillir les
passagers, la cargaison et les systèmes de l'avion, le rapport
épaisseur-corde maximum du profil d'aile constituant le corps central
doit être de l'ordre de 17% au moins (Liebeck, 2004).
· Angle du pont en croisière
Étant donné que le corps central du BWB inclut
la cabine passagers, son profil aérodynamique doit être choisi de
sorte que ce dernier génère de la portance nécessaire
à un angle d'attaque compatible avec les exigences d'angle de pont de la
cabine, généralement inférieur à 3 degrés
5
(Liebeck, 2004). Au vu de cette exigence, Liebeck (2004)
suggère l'utilisation d'un carrossage arrière positif sur les
profils aérodynamiques du corps central.
· Équilibrage
Lorsque le centre de pression aérodynamique
coïncide avec le centre de gravité et que toutes les surfaces de
contrôle de bord de fuite sont carénées, le BWB est
considéré comme équilibré, à la condition de
croisière nominale (Liebeck, 2004). Pour ce qui est de la
stabilité statique positive de l'avion, Liebeck (2004) recommande que le
moment de tangage à piquer soit minimisé, afin de limiter
l'utilisation d'un carrossage arrière positif et des conflits avec
l'exigence d'angle de pont précédente.
· Vitesse et attitude d'approche à
l'atterrissage
Pour les avions de type BWB, Liebeck (2004) affirme que la
déviation de la surface du bord de fuite est définie par les
exigences d'assiette plutôt que par la portance maximale. C'est la raison
pour laquelle le coefficient de portance maximum (et par conséquent la
charge alaire) d'un BWB sera inférieur à celui d'un avion de
configuration conventionnelle. Par ailleurs, comme les BWB n'ont pas de volets,
leur coefficient de portance maximum ne pourra qu'être atteint à
un angle d'attaque relativement grand ; par conséquent, l'assiette de
vol pendant l'approche sera proportionnellement élevée.
1.1.2. Prototypes d'avions Blended Wing Body
Les avions de type Blended Wing Body ont été
développés pour la première fois il y a plusieurs
décennies, à l'instar du XB-35, du YB-35 et du YB-49
développés pendant la seconde guerre mondiale pour l'armée
américaine, ou encore le célèbre bombardier furtif B-2A
Spirit développé pendant la guerre froide (Rose, 2010). Cette
section présente de manière chronologique quelques BWB ayant
été conçus et testés.
· Les XB-35 & YB-35
Les Blended Wing Body XB-35 et YB-35 étaient des
bombardiers expérimentaux développés pendant la Seconde
Guerre mondiale par la compagnie Northrop Corporation, pour l'armée de
l'air américaine. Le XB-35 a effectué son premier vol en juin
1946 pour un voyage de 45
6
minutes de Hawthorne en Californie, à Muroc Dry Lake,
sans incident (Rose, 2010). L'avion était propulsé par quatre
moteurs à hélices contrarotatives. Bien que les moteurs du XB-35
étaient peu fiables, cet avion a apporté un retour
d'expérience important, dans la conception des bombardiers à
ailes volantes. Le YB-35 est une version évoluée du XB-35
où les moteurs à hélices contrarotatives ont
été remplacés par des moteurs à hélices
à rotation unique Pratt & Whitney R-4360 de puissance unitaire 2200
kW (Rose, 2010). Le YB-35 a effectué son premier vol d'essai le 15 mai
1948, puis le projet fut abandonné en juillet 1949 (Rose, 2010).

Figure 1.1 : Northrop YB-35, bombardier long-courrier (Rose,
2010)
· Northrop Grumman B-2A Spirit
Le Northrop B-2A Spirit est l'un des plus
célèbres avions furtifs existants. Développé par
l'avionneur américain Northrop durant la guerre froide, le B-2A Spirit
est un bombardier de l'US Air Force (USAF) . Présenté comme le
plus performant au monde dans sa catégorie, le B-2A Spirit est
propulsé par quatre turboréacteurs General Electric F118 avec une
poussée unitaire de 77 kN (Rose, 2010). Cet avion a une envergure de
52,43 mètres et une longueur de 21,03 mètres. Sa masse à
vide est comprise entre 45 360 et 49 900 kg, pour une charge maximale
théorique d'environ 35 tonnes de bombes et missiles divers
disposée dans deux soutes (Rose, 2010). Le B-2A Spirit a effectué
son vol inaugural en juillet 1989, et le premier avion opérationnel a
été réceptionné par l'USAF fin 1993.
·

7
Figure 1.2 : Bombardier furtif B-2A Spirit (Rose, 2010)
Le Boeing BWB-450
En 1988, la NASA et McDonnell Douglas Corporation (maintenant
Boeing Corporation) ont mis sur pieds un projet visant à effectuer une
étude approfondie de la configuration BWB. Cette étude consistait
à développer et comparer un nouvel avion de transport subsonique
aux technologies avancées, avec un rayon d'action de 7000 nm et pouvant
transporter 800 passagers à 0,85 Mach (Liebeck, 2004). L'étude a
abouti sur une configuration d'avion BWB et, suite aux résultats
obtenus, Boeing a lancé une seconde étude pour la conception
préliminaire d'un avion de transport BWB ayant une capacité de
450 passagers (Liebeck, 2004). Des recherches expérimentales portant sur
la dynamique de vol et l'aérodynamique du BWB ont abouti à une
série d'essais en vol sur les modèles X-48 (A, B et C).
8
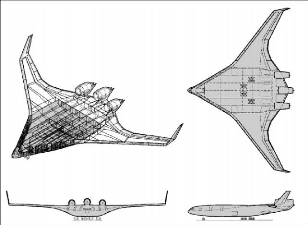
Figure 1.3 : Géométrie de base du Boeing BWB-450
(Liebeck, 2004)
· NASA-Boeing X-48
Le Boeing X-48 est une série de BWB
expérimental sans pilote, développé par la NASA-Boeing et
l'Air Force Research Laboratory en association, pour étudier les
avantages structurels, aérodynamiques et opérationnels du concept
Blended Wing Body. L'Air Force a désigné le prototype à
petite échelle sous le nom de X-48B, en raison de son
intérêt pour le potentiel de la conception en tant qu'avion de
transport militaire multi rôle à grand rayon d'action et de grande
capacité. La version modifiée mise à niveau suivante a
été désignée X-48C (Larrimer et al, 2020). Le
programme avait pour objectif d'en apprendre davantage sur les
caractéristiques de contrôle de vol à basse vitesse du
concept, appliqué aux gros avions de transport de passagers ou de fret.
D'ailleurs, le X-48 est une réplique à l'échelle de 8,5%
d'un avion réel (Larrimer et al, 2020 ; Gibbs, 2017). Il a
été dynamiquement mis à l'échelle pour voler avec
la même attitude ou presque, qu'un avion pleine grandeur. L'étude
consistait également à en savoir plus sur le potentiel de la
conception à obtenir une économie de carburant jusqu'à 30
% supérieure à celle des avions traditionnels (Larrimer et al,
2020). Les variantes X-48B et X-48C sont présentées dans les
sections suivantes.
9
· NASA-Boeing X-48B
Le Blended Wing Body X-48B a été construit par
Cranfield Aerospace au Royaume-Uni selon les spécifications de Boeing.
Le prototype de sous-échelle a une envergure de 20,4 pieds, avec des
ailerons verticaux proéminents, des gouvernails aux
extrémités des ailes et des élevons le long des bords de
fuite des ailes. L'avion est équipé de trois petits
turboréacteurs, fournissant une poussée combinée maximale
d'environ 150 lb, avec une masse totale de 523 lb. Le X-48B a une vitesse de
pointe estimée à 118 noeuds (222 km/h), une altitude maximale
d'environ 10000 pieds et une durée de vol d'environ 40 minutes (Larrimer
et al, 2020). Le contrôle au sol de l'avion a commencé à la
NASA Dryden à la fin 2006, et les premiers vols d'essai ont
été effectués début de 2007 (Gibbs, 2017 ; Larrimer
et al, 2020). Les essais visaient à caractériser le vol à
basse altitude de la configuration à fuselage intégrée, y
compris le contrôle de panne moteur, les caractéristiques de
décrochage et les qualités de manoeuvrabilité. Le
programme d'essais en vol court a été conçu pour
démontrer que la nouvelle conception peut être pilotée
aussi sûrement que les transports traditionnels à tube et aile.

Figure 1.4 : Prototype BWB X-48B (Gibbs, 2017)
· NASA-Boeing X-48C
Le Blended Wing Body X-48C est une version modifiée du
X-48B. il a effectué son premier
vol avec succès le 7 août 2012 à Edwards Air Force Base
(Larrimer et al, 2020 ; Creech et al, 2013). L'avion a été
conçu par Boeing, en partenariat avec la NASA. Les principales
modifications apportées au modèle « C » par rapport au
modèle « B » visaient à rendre l'avion plus silencieux.
Les modifications de la géométrie comprenaient le
déplacement des winglets de bout d'aile vers la queue de l'appareil
(à côté des conduits d'échappement du moteur),
10
transformant ainsi ces derniers en deux surfaces verticales
(Larrimer et al, 2020 ; Creech et al, 2013). Le corps arrière de l'avion
a été allongé d'environ deux pieds vers l'arrière.
Côté propulsion, l'équipe projet a remplacé les
trois moteurs à réaction de 50 livres du X-48B par deux moteurs
de 89 livres pour le X-48C.
En outre, le X-48C a conservé la plupart des dimensions
du modèle B, avec une envergure d'un peu plus de 20 pieds et un poids
avoisinant 500 livres. Sa vitesse de pointe est estimée à environ
140 mph, pour une altitude maximale de 10 000 pieds (Larrimer et al, 2020 ;
Creech et al, 2013).
Au regard des différences de manoeuvrabilité du
X-48C par rapport au X-48B, l'équipe du projet a apporté des
modifications logicielles du système de commande de vol, afin d'adapter
le domaine de vol de l'avion, en concordance aux futurs avions commerciaux BWB
grandeur réelle (Larrimer et al, 2020).

Figure 1.5 : Prototype BWB X-48C (Creech et al, 2013)
· Le projet AC 20.30
Afin de stimuler les recherches sur les BWB, la Commission
Européenne a soutenu d'octobre 2002 à octobre 2005 un projet
baptisé VELA, qui signifie : Very Efficient Large Aircraft (Scholz,
2007). L'objectif était de concevoir un avion de ligne sous forme d'aile
volante, ayant une capacité comparable à celle de l'A380. Le
projet a abouti sur les designs VELA 1, VELA 2 et VELA 3 conçus par le
DLR (Centre aérospatial allemand) et Airbus. Par la suite les
étudiants de l'Université des sciences appliquées (UAS) de
Hambourg, Département d'ingénierie automobile et
aéronautique, ont travaillé sur le projet BWB A0.30. La
géométrie de l'AC 20.30 était basée sur celle du
VELA 2. Dans le cadre de ce projet, un prototype sans
11
pilote à l'échelle 1 :30 de l'A0.30 a
été développé et construit. Puis de nombreux essais
de simulations numériques en soufflerie et en vol ont permis de mieux
comprendre le comportement de l'avion, ce qui a contribué à son
amélioration. Ces différents essais ont permis d'obtenir une
configuration stable de l'appareil (Schmidt et al, 2006).
L'A0.30 a une envergure de 3,24 m et une longueur de 2,12 m,
avec une masse au décollage de 12,5 kg. L'appareil possède deux
moteurs délivrant chacun une poussée de 30 N (Schmidt et al,
2006).

Figure 1.6 : Prototype BWB AC 20.30 (Thomas et al, 2013)
· Airbus MAVERIC
Lancé en 2017, le Blended Wing Body MAVERIC (Model
Aircraft for Validation and Experimentation of Robust Innovative Controls) de
Airbus a effectué son premier vol en juin 2019 (MAVERIC, 2020a). Le
MAVERIC a été dévoilé le 11 février 2020
à Singapour. Avec ce projet, l'objectif de Airbus est de tirer parti des
technologies émergentes pour être le pionnier de l'avenir du vol.
L'avion a une envergure de 3,2 mètres, une longueur de 2 mètres
et une superficie d'environ 2,25 m2. MAVERIC présente une
conception d'avion révolutionnaire, qui a le potentiel de réduire
la consommation de carburant jusqu'à 20% par rapport aux avions à
tube et aile conventionnels (MAVERIC, 2020a).
·

12
Figure 1.7 : Prototype du BWB MAVERIC de Airbus (MAVERIC,
2020b)
Synthèse des caractéristiques des BWB
présentés
Le tableau 1.1 fournit une synthèse des
caractéristiques disponibles, des principaux BWB présentés
précédemment.
Tableau 1.1 : Caractéristiques de quelques BWB
conçus et testés
Paramètre caractéristique
|
YB-35
(Rose, 2010)
|
B-2A Spirit (Rose,
2010)
|
X-48B
(Larrimer
et al,
2020)
|
X-48C
(Larrimer
et al, 2020)
|
A0.30
(Schmidt et
al, 2006)
|
Envergure
|
52,5 m
|
52,42 m
|
6,4 m
|
6,1 m
|
3,2 m
|
Allongement
|
7,4
|
-
|
4,1
|
4,1
|
-
|
Charge alaire
|
220 kg/m2
|
356 kg/m2
|
25,3 kg/m2
|
25,3 kg/m2
|
6,22 kg/ m2
|
Masse à vide
|
54 432 kg
|
69 717 kg
|
178 kg
|
178 kg
|
-
|
Masse maximale au décollage
|
95 000 kg
|
170 550 kg
|
237 kg
|
237 kg
|
12,5 kg
|
Puissance totale
|
8 800 kW
|
-
|
-
|
-
|
-
|
Poussée totale
|
-
|
308 kN
|
0,72 kN
|
0,79 kN
|
0,06 kN
|
Vitesse maximale
|
629 km/h
|
915 km/h
|
219 km/h
|
225 km/h
|
108 m/s
|
Rayon d'action
|
13 100 km
|
10 186 km
|
35 min de
vol
|
35 min de
vol
|
-
|
Plafond
|
12 100 m
|
15 240 m
|
3 048 m
|
3 048 m
|
-
|
Facteur de structure
|
0,573
|
0,409
|
0,751
|
0,751
|
-
|
Poussée/Poids
|
-
|
0,205
|
0,304
|
0,333
|
0,48
|
|
13
Au regard des caractéristiques
présentées dans le tableau 1.1, il apparait que le B-2A Spirit,
avec un facteur de structure de seulement 0,409 et un rapport
poussée/poids de 0,205 est un avion aux performances avancées, en
comparaison avec le YB-35, ou en encore avec les X-48B et C. Par ailleurs, le
facteur de structure des BWB X-48B et X-48C semble assez élevé.
Ceci pourrait s'expliquer par le fait qu'il s'agit de prototypes
expérimentaux sans pilote. Ils intègrent donc certainement un
nombre important d'équipements d'acquisition, de contrôle et de
monitoring.
1.2. Présentation du design de Blended-Wing-Body
étudié
L'avion étudié est un BWB, dont le design
préliminaire et l'analyse de stabilité ont été
réalisés par Velazquez (2020) et Delacroix (2017). Dans cette
section, les paramètres de performance ainsi que la
géométrie de l'avion seront présentés.
1.2.1. Paramètres critiques et de conception
Le tableau ci-après donne les paramètres
critiques de l'avion. Ces paramètres ont été obtenus par
Velazquez (2020), grâce à des analyses basses et hautes
fidélités.
Tableau 1.2 : Paramètres critiques du BWB (Velazquez,
2020)
Paramètres critiques
|
Notation
|
Valeur
|
Finesse
|
|
16,6
|
Charge alaire
|
|
140 kg/m2
|
Ratio poussée-poids
|
|
0,441
|
Consommation spécifique
|
|
0,680 lb/lb-h
|
Coefficient de portance
maximale
|
|
0,67
|
|
Cependant, la valeur du ratio poussée-poids de 0,441
estimée semble trop élevée, en comparaison avec les avions
commerciaux de type TAW de taille similaire donc les caractéristiques
sont présentées en annexe (cf. annexe 1). Sur la base des cinq
avions TAW de la catégorie "avion de ligne régional" de type jet
que présente cette annexe, il en ressort que le
14
rapport "poussée-poids" des avions de cette
catégorie se situerait entre 0,28 et 0,36 ; donc bien
moins en dessous des 0,441 estimé par Velazquez (2020).
1.2.2. Géométrie de l'avion
À l'issue de son design, Velazquez (2020) propose une
géométrie optimisée de l'appareil, notamment du corps
central (fuselage), de l'aile extérieure ainsi que de la jonction
aile-fuselage. L'aménagement de l'espace interne de l'avion est
également présenté.
· Configuration extérieure (Velazquez,
2020)
La figure 1.8 présente une vue en plan de l'avion
décomposée en CB (corps central), TW (jonction corps central et
aile extérieure) et OW (aile extérieure). L'axe x
représente la mesure d'abscisse dans le sens de la corde à
partir du bord d'attaque du profil central. L'axe y représente
l'ordonnée de la demi-envergure. Le CB est caractérisé par
un profil aérodynamique LA2573A à ses extrémités
(y = 0m et y = 5m) tandis que le OW est
caractérisé par un profil aérodynamique SC(2)-0712
à ses extrémités (y = 6,5m et y
= 17,2m). La surface de référence Sref est
fixée à Sref = 316 m2. Il en
résulte une distribution de surface de 65% à 35% entre le CB et
le reste de l'aile (Sce = 0,65Sref, Sow + Tw
= 0,35Sref).
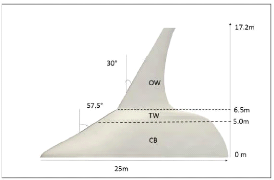
Figure 1.8 : Sections finales du BWB (Velazquez, 2020)
· Disposition cabine-soute (Velazquez,
2020)
Le corps central contient à la fois la cabine
passagers et la soute, y compris le cockpit. L'angle de balayage de la baie
(60°) définit le nombre maximum de sièges par rangée
allant de 6 à 12.
Le tableau 1.4 montre les paramètres
aérodynamiques résultant d'une analyse
haute-fidélité de la géométrie (Velazquez,
2020).
15
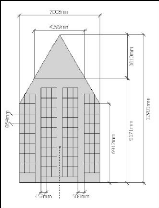
Figure 1.9 : Configuration de la cabine (Velazquez, 2020)
?LE, CB
?LE , O
La soute contient quatre conteneurs équivalents LD3
d'une capacité maximale de volume de chargement de
20m3. Ces conteneurs LD3 sont situés à gauche
et à droite de la cabine passagers, ajoutant 2 X 1,53 m
à la portée du CB.
1.2.3. Résumé des performances de
l'aéronef
Le tableau 1.3 présente les paramètres
géométriques de l'avion que sont : l'envergure (b), la
surface de référence de la forme en plan (Sref),
l'allongement (AR), l'angle de flèche, la corde
à la racine (Croot), la corde moyenne
aérodynamique (), l'angle de vrille (??) et l'effilement
(A).
Tableau 1.3 : Paramètres géométriques du
BWB (Velazquez, 2020)
|
|
|
|
|
|
|
|
|
|
34,4m
|
316m2
|
3,76
|
57,5°
|
30°
|
25m
|
7,6m
|
16,9m
|
0°
|
0,20
|
|
16
Tableau 1.4 : Paramètres aérodynamiques du BWB
(Velazquez, 2020)
CDO
|
CL,cruise
|
CL,max
|
(L D)max
|
(L D)cr
|
0,0118
|
0,230
|
0,670
|
16,6
|
15,3
|
|
Le tableau 1.5 présente l'altitude de croisière
désirée Hcr, la poussée de croisière
Tmax,cr, les vitesses minimales et de croisière
estimées, puis le rayon d'action maximal Rmax du BWB, suite
à l'évaluation de Velazquez (2020).
Tableau 1.5 : Performances en croisière du BWB
(Velazquez, 2020)
Tm ,Hp
|
H raise
|
Vcr,min
|
Ver
|
Rinax
|
34,3 kN
|
14,3 km
|
115 m/s
|
230 m/s
|
2500 km
|
|
Le tableau 1.6 présente les valeurs de performance
à basse vitesse, à savoir la poussée maximale au niveau de
la mer Tmax, sL, l'altitude de roulage au sol HTOL,
les vitesses de décrochage et d'approche estimées à
HTOL, et la longueur de piste minimale requise au décollage.
Tableau 1.6 : Performance à basse vitesse du BWB
(Velazquez, 2020)
Tmax,sL
|
HTOL
|
stall
|
VapProci
|
Srun
|
193 kN
|
0 m
|
52 m/s
|
68 m/s
|
1,41 km
|
|
1.2.4. Masse des précédents designs de
l'avion
Dans le cadre de leurs travaux respectifs, Delacroix (2017)
et Velazquez (2020) ont chacun fait une estimation détaillée de
la masse du BWB, sur la base des mêmes requis présentés au
tableau 2.1. Le tableau 1.7 présente les évaluations
détaillées de la masse du BWB, tirées leurs travaux.
17
Tableau 1.7 : Masse détaillée du BWB,
prédite par Delacroix (2017)
et Velazquez (2020)
Éléments
|
Masse de l'avion Delacroix (2017)
|
(kg)
Velazquez (2020)
|
Corps central
|
4672
|
6442
|
Aile
|
889
|
2575
|
Equipment
|
4449
|
6592
|
Train d'atterrissage principal
|
2545
|
382
|
Train d'atterrissage avant
|
449
|
2167
|
Propulsion
|
3112
|
4667
|
Masse à vide estimée
|
16116
|
n/a
|
Pénalité
|
13193
|
n/a
|
Total Masse à vide
|
29310
|
22825
|
Carburant dans le corps central
|
|
4838
|
|
10994
|
|
Carburant dans l'aile
|
|
4838
|
Total carburant
|
10994
|
9677
|
Équipage
|
467
|
467
|
Passagers (en cabine)
|
9340
|
9340
|
LD3
|
2415
|
2415
|
Totale charge utile
|
12222
|
12222
|
Masse totale maximale au
|
|
|
décollage (MTOW)
|
52526
|
44724
|
|
Pour le même avion et avec les mêmes requis de
mission, on observe une différence significative entre les
prédictions de masse présentée par Delacroix (2017) et
celle présentée par Velazquez (2020). En effet la masse totale au
décollage de l'avion prédite par Delacroix (Delacroix, 2017) est
de 17,5% supérieure à celle prédite par Velazquez
(Velazquez, 2020).
À la vue de cet écart entre les deux
estimations, la masse du design initial de l'avion sera prise comme
étant la moyenne entre les masses de design prédites par
Delacroix (2017) et de Velazquez (2020).
18
Dans ce chapitre, il était question dans un premier
temps de présenter le concept d'avions de type BWB en comparaison avec
les avions à TAW classiques. Par la suite, quelques avions de type BWB
remarquables ayant été conçus et testés ont
été présentés, ainsi que leurs
caractéristiques. Puis, la dernière version à date du
design de BWB réalisé par Velazquez (2020) et objet de ce travail
a été présenté. Ensuite, une comparaison entre la
masse du design du BWB prédite par Velazquez (2020) et celle
prédite par Delacroix (2017) dont les travaux étaient
basés sur un design antérieur de l'avion a été
effectuée. À l'issue de cette comparaison, il en est ressorti que
la masse du BWB prédite par Delcroix était 17% plus grande que
celle prédite par Velazquez. Au regard de cette différence tout
de même significative, la suite de ce travail consistera à
élaborer une méthodologie qui permettrait de prédire la
masse de l'avion d'une part, puis à réévaluer ses
performances d'autre part.
CHAPITRE 2
MÉTHODOLOGIE DE PRÉDICTION DE LA MASSE ET
DES PERFORMANCES
DU BWB
Ce chapitre présente la démarche ainsi que les
méthodes utilisées pour la détermination de la masse
détaillée du BWB, le dimensionnement du groupe de propulsion, le
dimensionnement des surfaces verticales et du train d'atterrissage,
l'estimation des distances de décollage et d'atterrissage,
l'évaluation des performances en montée et en descente, le calcul
du facteur de charge et le domaine de vol, l'analyse de la stabilité de
l'appareil pour finir.
2.1. Requis de la mission
Cette section présente les exigences
opérationnelles auxquelles devrait satisfaire le BWB tels que : la
charge utile minimale, la vitesse de croisière, le rayon d'action,
l'endurance en attente et la longueur maximale de la piste.
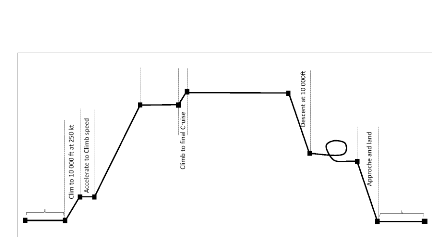
2.1.1. Segment de mission à satisfaire par le
BWB
La figure 2.1 présente la mission type à
laquelle le BWB devrait satisfaire. Il s'agit d'un profil type pour un vol
commercial. Le carburant total doit être capable d'assurer la mission,
avec une réserve minimale de 5% à l'atterrissage.
La mission commence en 0 du desserrage des
freins au décollage, et se termine à l'arrêt des moteurs
après l'atterrissage 11. Le carburant total
emporté pour la mission doit permettre de réaliser toutes les
phases de la mission à savoir : le décollage
0-1, l'accélération et la
montée jusqu'à l'altitude de croisière initiale
1-4, la vitesse de croisière initiales
4-5, la montée jusqu'à
l'altitude de croisière 5-6, le vol de
croisière 6-7, la descente et
l'attente à 10,000 pieds 7-9, la
descente et la décélération pour l'approche
9-10, puis l'atterrissage à
destination 10-11.
20
0 1
10 11
Initial
cruise
Climb
take-off
2 3
4 5
Cruise flight
6 7
Loiter
reserve
Le tableau 2.2 donne les valeurs moyennes typiques des
fractions de masse entre les différentes phases de la mission. Dans ce
tableau, Ma représente le nombre Mach de vol.
Figure 2.1 : Segment de la mission (adapté de Torenbeek,
2013)
2.1.2. Caractéristiques attendues de l'avion
Taxi and
8
9
Taxi from
Le BWB doit être conçu de telle manière que
ses caractéristiques opérationnelles satisfassent
aux exigences de la mission. Ainsi, le tableau 2.1
présente les requis opérationnels auxquelles
doit satisfaire l'avion.
Tableau 2.1 : Exigences de la mission (Velazquez, 2020)
Paramètre de la mission
|
Symbole
|
Unité
|
Valeur
|
Nombre de passagers
|
PAX
|
-
|
100
|
Charge utile
|
Wpayload
|
kg
|
11640
|
Équipage (5 membres)
|
Wcrew
|
kg
|
582
|
Rayon d'action
|
R
|
km
|
2500
|
Mach de croisière
|
Mcr
|
-
|
0,78
|
Longueur de piste (décollage et atterrissage)
|
BFL
|
m
|
2000
|
Endurance en attente
|
E
|
min
|
45
|
|
21
Tableau 2.2 : Valeurs typiques des fractions de masse par
segment (Raymer, 2006)
Segment
|
Phase de la mission
|
|
0-1
|
Démarrage des moteurs, roulage et décollage
|
0,980
|
1-2
|
Montée à 10 000 ft à 250 kts
|
1,0065 - 0,0325Ma
|
2-3-4
|
Accélération jusqu'à la vitesse de
seconde montée 450 kts et montée
|
1,0065 - 0,0325Ma
|
4-5
|
Croisière initiale 34 440 ft (10 500 m)
|
Équation de Breguet
|
5-6
|
Montée à 47 560 ft (14 500 m) pour le vol de
croisière
|
0,990
|
6-7
|
Vol de croisière à 47 560 ft (14 500 m)
|
Équation de Breguet
|
7-8
|
Descente à 10 000 ft
|
0,993
|
8-9
|
Survol en attente
|
Équation d'endurance
|
9-10
|
Descente et approche pour atterrissage
|
0,993
|
10-11
|
Atterrissage
|
0,995
|
|
Dans les sections qui suivent, la masse maximale de l'avion au
décollage (MTOW) pourra être déterminée, de
manière à ce que l'avion soit capable de satisfaire la
mission.
Par ailleurs, la distance parcourue par l'avion pendant la phase
de croisière initiale sera assumée inférieur ou
égale au 1/10ième du rayon d'action maximal, car il s'agit d'une
phase assez courte permettant aux pilotes de préparer les conditions de
vol de la croisière finale.
2.2. Méthodologie de prédiction
détaillée de la masse de l'avion
La prédiction de la masse est une étape cruciale
lors du processus de design d'un avion. Cette section présente la
méthodologie utilisée pour le calcul de la masse
détaillée du BWB.
2.2.1. Algorithme de calcul de la masse du BWB
L'algorithme ci-après présenté
décrit succinctement la structure du programme MATLAB
élaboré pour le calcul de la masse détaillée de
l'avion. Étant donnée l'approche itérative de l'estimation
de la masse d'un aéronef, une masse de départ est
nécessaire, pour démarrer les
22
calculs. Dans le processus de design d'un avion, cette masse
initiale correspondrait à la « la masse du design
préliminaire ».
Pour ce travail, la masse du design préliminaire de
l'avion sera prise comme étant la moyenne des masses de design obtenues
par Delacroix (2017) et Velazquez (2020). Le facteur de structure en
opération (OEW/MTOW) de l'avion sera pris à l'initial comme
étant la moyenne des facteurs de structure opérationnels des
avions de ligne régionaux de type TAW de taille comparable (cf. annexe
1).
niter = 0
Conditions initiales
--* Définir la masse du design
préliminaire de l'avion, à partir des travaux de Delacroix (2017)
et de Velazquez (2020).
[kg]
[kg]
niter ,max
--* Définir le facteur de structure
opérationnel de l'avion, à partir des avions TAW de taille
comparable (cf. annexe 1).
--* Choisir le modèle de prédiction de
la masse de l'aile extérieure, parmi les modèles de Howe (200),
Kundu (2019) et Torenbeek (2013).
--* Initialiser l'erreur de calcul de la masse maximale
au décollage (MTOW)
--* Initialiser du nombre d'itérations de
calcul
--* Définir le nombre d'itérations
maximal de la boucle de calcul
End
23
Boucle de calcul de la masse de
l'avion
While and ( , )
W W
i i
OE + pay
For
MTOW i
If
else
1-(1-WW)(
1 + f +
f )
End
Calculer la masse à vide détaillée du
BWB
LA TO ess trap
Calculer la masse à vide opérationnelle du BWB
Erreur MTOW
MTOW i
1 -
MTOW -
Calculer la masse maximale au décollage du BWB

Déduire la masse de carburant
Déduire le facteur de structure du BWB
Calculer l'erreur relative entre les masses maximales au
décollage à i-1 et à i =
End
i
1
2.2.2. Prédiction de la masse à vide de
l'avion
Dans toute cette rubrique, l'estimation de la masse de
l'avion a été réalisée à l'aide des
méthodes empiriques d'estimation de la masse des composants à
l'exception de la masse de la cellule théorique du BWB où
l'approche d'estimation semi-empirique de Bradley (2004) a été
24
utilisée. Le tableau ci-après présente
la liste des références qui ont été
utilisées pour l'estimation de la masse.
Tableau 2.3 : Références du calcul
détaillé de la masse de l'avion
GROUPE
|
DÉTAIL DES ÉLÉMENTS
|
MODEL
|
ÉLÉMENTS STRUCTURAUX
|
Structure de la Cellule
|
|
(Howe, 2000 ; Kundu,
2019 ; Torenbeek, 2013)
|
|
(Kundu, 2019)
|
|
Bradley (2004)
|
|
Bradley (2004)
|
|
Torenbeek (2013)
|
|
|
Torenbeek (2013)
|
|
|
Raymer (2006)
|
|
|
|
|
|
|
|
Kundu (2019)
|
|
25
|
Ensemble Fournitures (sièges, mobilier, oxygène,
etc.)
|
Kundu (2019)
|
CHARGE UTILE
|
Passagers, y compris les bagages à main
|
(Corke, 2003 ; Raymer,
2006)
|
|
Raymer (2006)
|
|
Howe (2000)
|
ÉLÉMENTS
OPÉRATIONNELS
|
Équipage (05 membres)
|
(Corke, 2003 ; Raymer,
2006)
|
|
Kundu (2019)
|
CARBURANT
|
Carburant dans l'aile (50%) Carburant dans le fuselage (50%)
|
Déduit
|
|
2.2.2.1. Estimation de la masse du fuselage
0,166552 1,061158
W = K
x 0,316422 ? MTOW
x S
fuse s cabine
Le modèle de Bradley (2004) a été
utilisé pour prédire la masse du fuselage. La méthode de
prédiction de masse de Bradley repose sur un modèle
semi-empirique implémenté dans le logiciel d'optimisation de vol
(FLOPS). Ce modèle permet de déterminer la masse du corps central
d'un BWB comme étant la somme de la masse du corps central avant (qui
représente la partie pressurisée du fuselage) et du corps central
arrière compté à partir de 70% de la corde du corps
centrale, tel qu'illustré par la figure 2.2.
MTOW
K s = ( 5,698869 450 ) n pax
Avec ce modèle, la masse du corps central avant est
donnée comme suit :
(2.1)
Avec :
.
[lb] le poids total maximum au décollage.
26
[ft2] la surface de référence de la
cabine. le nombre de passagers.
La masse du corps central arrière incluant un facteur
pour le nombre de moteurs supportés par le corps central est
donnée par l'équation suivante :
(2.2)
Avec :
le nombre de moteurs installés sur le fuselage.
[ft2] la surface de référence de la
section arrière du fuselage.
[lb] le poids total maximum au décollage. l'effilement de
la section arrière du fuselage.

Figure 2.2 : Vue en plan de la géométrie
simplifiée du BWB (Bradley, 2004)
2.2.2.2. Estimation de la masse de l'aile
extérieure
Dans ce travail, l'aile extérieure du BWB sera
assumée semblable à l'aile d'un avion conventionnelle. Dans la
littérature, Il existe plusieurs modèles semi-empiriques
permettant d'estimer la masse de l'aile d'un avion conventionnel, à
l'instar des modèles de Howe (2000), de Kundu (2019) et de Torenbeek
(2013).
27
· Avec le modèle de Howe, la masse de l'aile
extérieure est donnée par l'équation suivante (Howe, 2000)
:
[kg] (2.3)
Où :
est l'allongement de l'aile.
[m2] est la surface de référence de
l'aile.
= 9x 10-a pour les avions de type jet
moyen-courrier.
est l'effilement de l'aile.
[m/s] est la vitesse de divergence de l'avion.
· Avec le modèle de Kundu, la masse de l'aile
extérieure est donnée par l'équation
suivante (Kundu, 2019) :
W =c ?k ?k ?k
?k ?k ?
wing w uc sl sp wl re
(
MTOW?nul)0,48?Sw,78?ARw?(1+?)0,4
? 1 - Wfuel _mass _in
_wing
? MTOW
re pour aucun moteur, 0,98 pour deux
moteurs et 0,95 pour quatre moteurs (généralisé).
(2.4) Où :
k=1
cw = 0, 0215 pour des volets de montage standard
sur l'aile.
k =1,02 pour le train d'atterrissage monté sur les
ailes, sinon 1,0.
ksl =1,04 pour l'utilisation des slats.
ksp =1,01 pour un spoiler.
kwl =1,01pour un winglet (une approche
généralisée consiste à avoir une taille
standard).
· 28
?V.
Avec le modèle de Torenbeek, la masse de l'aile
extérieure est donnée par l'équation suivante (Torenbeek,
2013) :
Où :
t c VT
(2.5)
[ft] une valeur de référence du modèle.
[lbf/ft2] une valeur de référence du modèle.
2.2.2.3. Estimation de la masse de l'empennage
vertical
Le modèle de Kundu (2019) pour l'estimation de la
masse de l'empennage vertical d'un avion à réaction est
donné par l'équation suivante :
?V.
(2.6)
Avec :
pour les empennages en T, 1,2 pour les empennages
médians et 1,0 pour les
empennages bas.
l'allongement de l'empennage vertical.
la surface de référence de l'empennage
vertical.
l'effilement de l'empennage vertical.
l'angle de flèche de l'empennage vertical (pris au quart
de corde). l'épaisseur relative du profil d'aile de l'empennage
vertical.
29
2.2.2.4. Estimation de la masse des éléments
internes
Estimation de la masse des surfaces de contrôles
(Raymer, 2006)
Les surfaces de contrôle incluent toutes les surfaces
mobiles de l'aile qui n'ont pas été incluses dans le calcul de la
masse des volets. Le groupe comprend toutes les commandes internes de l'aile et
les commandes des dispositifs de bord d'attaque externes.
(2.7)
Estimation de la masse du train d'atterrissage
(Torenbeek, 2013)
La masse du train d'atterrissage comprenant les trains avant
et arrière est donnée par la relation suivante :
(2.8)
Estimation de la masse du système de propulsion
(Torenbeek, 2013)
La masse du groupe de propulsion inclut le moteur, la
nacelle, le pylon, le système de carburant, système d'huile et
démarreur.
( eng ) fix
(2.9)
Avec :
le nombre de moteurs de propulsion installés.
W
[lbf] la poussée maximale au décollage.
[lbf] l'effet d'échelle correspondant à 1 800 lbf
par moteur.
Estimation de la masse des
équipements/instrumentations
La masse du système d'air conditionné est
donnée par l'équation suivante :
V ?
0,25 pr 0,10
62,36 ? ? ?
W = N
AirCond p 1000 ? W
uav
? ?
0,604 (2.10)
30
Avec :
le nombre de personnes à bord (équipage et
passagers).
N = n
gen eng
[ft3] le volume de la section pressurisée.
(lb) la masse des systèmes avioniques non
installés.
La masse des systèmes avioniques s'exprime comme suit
(Raymer, 2006) :
(2.11)
La masse des systèmes hydrauliques est donnée
comme suit (Raymer, 2006) :
(2.12)
Avec :
le nombre de fonctions exécutées par les
commandes.
[ft] la longueur totale du fuselage.
[ft] l'envergure des ailes.
La masse des systèmes électriques s'exprime comme
suit (Raymer, 2006) :
W instruments = 4,509 K r K
tp N c N en L f B w
0,541 ( )0,5
(2.13)
Avec :
K = 1,0
la puissance du système électrique [KVA].
[ft] la distance du chemin de câble électrique
entre générateurs-avioniques-cockpit.
le nombre de générateurs.
La masse des instruments est donnée par l'équation
suivante (Raymer, 2006) :
+
(2.14)
Avec :
r
pour les moteurs non alternatifs.
31
pour les jets.
le nombre de membres d'équipage. le nombre de moteurs.
La masse des accessoires de manutention est donnée par la
relation suivante (Raymer, 2006) :
(2.15)
Où :
est la masse totale au décollage du design
préliminaire.
La masse du système de dégivrage est donnée
l'équation suivante (Raymer, 2006) :
KFUR =?0,07;0,08?
(2.16)
La masse de l'unité de puissance auxiliaire (APU)
s'exprime comme suit (Kundu, 2019) :
(2.17)
W FUR = KFUR MTOW
Où :
est un coefficient pris dans l'intervalle est la masse d'un
moteur à sec.
Estimation de la masse du groupe d'ameublement et
fournitures (Kundu, 2019)
Ce groupe comprend les sièges, les cuisines, le
mobilier, les toilettes, le système d'oxygène et la peinture. Sa
masse totale peut être estimée par la relation suivante :
(2.18)
Avec :
pour les avions de 100 passagers et plus.
32
Wpayload
Estimation de la masse des éléments
opérationnels (Howe, 2000)
Les éléments opérationnels incluent :
équipage et objets personnels associés, équipements de
sécurité tels que l'oxygène d'urgence et les radeaux de
sauvetage, matériel de fret, eau et nourriture.
n pax
(2.19)
Avec :
le nombre des membres d'équipage.
le nombre de passagers.
le facteur des éléments opérationnels pour
les avions moyen-courriers.
Estimation de la charge utile payante
La charge utile est la capacité nette d'emport d'un
aéronef. Pour un avion de transport, la charge utile comprend les
bagages, la cargaison, les passagers, les bagages, et d'autres charges
prévues (Sadraey, 2013). Dans le cas d'un avion de passagers, le poids
des passagers doit être déterminé. Le poids moyen d'un
passager avec bagage en main peut être pris à 180 livres. De plus,
chaque passager a droit à une franchise de bagages 40 à 60 livres
en soute, pour les trajets interrégionaux (Corke, 2003 ; Raymer, 2006).
Les bagages en soute sont mis dans deux conteneurs de type LD-3. Chacun de ces
conteneurs a une masse à vide de 463 lb (210 kg). L'équation
ci-après donne l'expression de la charge utile payante, pour le BWB.
m= 180
= 50
(2.20)
Avec :
[lb] la masse totale de la charge utile.
le nombre de passagers.
[lb] la masse d'un passager avec bagage en main.
m= 463
[lb] la franchise de bagages par passager pour les avions
régionaux.
ncont
le nombre de conteneurs en soute.
cont
[lb] masse à vide d'un conteneur LD-3.
33
Masse à vide de l'avion
Une fois que la masse de toutes les sous-composantes de
l'avion a été calculée, la masse à vide se
déduit par sommation comme présentée dans le tableau 2.3
précédent.
(2.20)
Estimation du facteur de pénalité de la
masse totale (Kundu, 2019)
Cette masse supplémentaire est incluse pour prendre en
compte la masse de tous les éléments n'ayant pas
été évalués dans les estimations
détaillées.
(2.21)
Avec : le coefficient de pénalité global pris
entre 0 et 1%.
Masse à vide opérationnelle de
l'avion
La masse à vide de l'avion en opération est
constituée de la masse structurelle, de l'équipage
et des éléments opérationnels.
WOE
Wfuel
(2.22)
2.2.2.5. Masse maximale au décollage
W payload
La masse de l'avion au décollage est donnée par la
relation suivante :
(2.23)
Avec :
la masse à vide opérationnelle (inclus la masse
structurelle, l'équipage et les éléments
opérationnels).
la masse d'emport de carburant.
la charge utile de l'avion.
L'équation (2.23) peut être réécrite
sous la forme de rapports de poids comme suit :
34
(2.24)
Par ailleurs, la fraction de masse entre l'atterrissage et le
décollage est donnée par la relation suivante (Raymer, 2006) :
W TO
=
W W
OE + payload
1 - 1 + ( 1 -
? W W f f
LA TO )( 1 )
+ + ?
? ess trap ?
WLA i + 1
=? W
W W
TO i = 0 i
(2.25)
L'équation (2.25) peut être réécrite
comme il suit :
(2.26)
La combinaison des équations (2.24) et (2.26) donne :
Le rapport entre les poids à l'atterrissage et au
décollage s'obtient par la relation suivante :
n
(2.28)
Dans cette relation, les indices 0 et n correspondent
respectivement au début de la phase de
décollage et à la fin de la phase d'atterrissage.
Le rapport de poids entre chaque phase
est donné par le tableau 2.2
précédemment présenté. En particulier, le rapport
des poids en croisière et pendant l'attente sont donnés par les
équations de Breguet et d'endurance. L'expression de l'équation
de Breguet pour la distance maximale parcourue à vitesse de
croisière est donnée comme suit (Raymer, 2006) :
V ? L ? ?
W ?
cr i
R = ? ? ? ?
TSFC D
? ? ? ?
cr i + 1
R
l11
W
Où :
[nm] est la distance parcourue.
|
(2.29)
|
|
35
[kt] est la vitesse de l'avion en croisière.
[lb/hr/lb] est le taux de consommation spécifique des
moteurs.
est la finesse de l'avion en croisière.
Pour un jet, la finesse en croisière représente
86,6% de la finesse maximale (Raymer, 2006).
( )max
L D ? ?
ln W i
= ? ?
TSFC ? ?
W i + 1
Wfuel WTO ~ WOE
~ W payload
(2.30)
Ainsi, le rapport des poids pendant la croisière peut
être déduit comme suit :
W ? _ . ?
E TSFC
i + 1 max
exp ?
W l ? ( )
L D
i ? ?
max
(2.31)
L'endurance pour un avion de type jet est donnée par la
relation ci-après (Raymer, 2006) :
= l
Emax
W LA = W ZF + W
réserve
|
|
(2.32)
|
|
L'équation (2.31) permet de déduire le rapport des
poids pendant la phase d'endurance.
Masse maximale de carburant
La connaissance de la masse maximale au décollage de
l'avion permet de déduire la capacité maximale d'emport de
carburant.
(2.34)
Masse maximale de l'avion à
l'atterrissage
Avec l'hypothèse que l'avion atterrit avec un niveau de
carburant correspondant à la réserve, le poids à
l'atterrissage est donné par la relation suivante :
W ZF = WOE + Wpayload
(2.35)
Où :
est le poids de l'avion à sec, c'est-à-dire sans
carburant.
La trainée d'onde étant négligeable
(l'avion vole en dessous de Mach 0,8), le coefficient de trainée CD
s'exprime comme suit :
36
est le poids de la réserve de carburant.
Pour un avion de ligne, Torenbeek estime que le poids maximal
admissible pour atterrir est 10% supérieur au poids maximal de l'avion
à sec (Torenbeek, 2013).
(2.36)
Où :
est le poids maximal de l'avion à zéro
carburant.
2.3. Dimensionnement du groupe de propulsion
Cette section traite de l'évaluation des performances
et des caractéristiques du groupe de propulsion requis au regard des
contraintes de la mission à satisfaire. Spécifiquement, il
s'agira tout d'abord de déterminer la poussée maximale que
devront développer les moteurs, pour assurer la propulsion de
l'aéronef. Par la suite, la poussée unitaire ainsi que les
dimensions du moteur seront déterminées.
2.3.1. Poussée maximale des moteurs
La poussée maximale que devrait délivrer les
moteurs pour propulser l'avion sera considérer dans ce travail comme
étant la poussée disponible desdits moteurs au niveau de la mer.
Pour la déterminer, la démarche ici consiste à estimer
tout d'abord la poussée requise et la poussée disponible en
croisière et, par la suite déduire la poussée maximale au
niveau de la mer.
2.3.1.1. Poussée requise en croisière
1
2
En vol subsonique de croisière et sans trainée
d'onde, la poussée requise est la poussée minimale
nécessaire à l'aéronef pour vaincre la trainée ; ce
qui se traduit par l'équation ci-après :
T R =D= ?
V SC D
2
(2.37)
37
(2.38)
Où est le coefficient global de trainée du BWB au
complet (moteurs et empennage
inclus).
La combinaison des équations (2.37) et (2.38) permet
d'obtenir l'expression de la poussée requise en croisière, en
fonction l'altitude de vol (à travers la densité) et de la
vitesse de l'avion.
(2.39)
2.3.1.2. Poussée disponible en croisière
1 2 kS W
2 cr
Par définition, la poussée disponible à
l'altitude de croisière est la poussée maximale que doivent
délivrer les moteurs lorsque l'avion vole à vitesse maximum
(Anderson, 1999). En d'autres termes, la poussée disponible en
croisière correspond à la poussée requise à vitesse
maximale. Analytiquement, cela se traduit par :
( "
? T = P V SC
dispo max 0,
H D bwb V S
? ?
P max ?
H cr
(2.40)
2
2
2
(2.41)
V =
1,0525 ? V cr
max
est la vitesse maximale atteignable par l'avion en
croisière.
Par analogie avec les avions régionaux TAW de taille
comparable (cf. annexe 1) tels que le BAe 146, le CRJ 1000 ou encore le
ARJ21-900, la vitesse maximale de l'avion pourrait être définie
entre 5% et 5,5% supérieure à la vitesse de croisière.
Ainsi, pour le BWB la vitesse maximale en croisière sera définie
comme suit :
La poussée disponible délivrée par les
moteurs à cette altitude devrait être supérieure à
la poussée requise pour vaincre la traînée.
(2.42)
38
2.3.1.3. Poussée maximale au niveau de la mer
Le modèle de poussée de Mattingly (1987)
présenté ci-après est un des plus répandu et il a
servi de référence à de nombreux travaux sur les moteurs
(Roux, 2005 ; Ghazi, et al. 2015). Il permet de déterminer pour un
moteur de type turbosoufflante à haut taux de dilution, la
poussée générée en fonction de l'altitude et du
nombre de Mach de vol. Torenbeek caractérise les turbosoufflantes
à haut taux de dilution comme ayant un taux de dilution compris entre 4
et 10 (Torenbeek, 2013). Par ailleurs dans ses travaux, Bardela a montré
que le modèle de Mattingly est fiable à plus de 98%, pour la
prédiction de la poussée du Cessna Citation X (Bardela, 2017).
(2.43)
Où :
est la disponible pour une altitude et un nombre de Mach
donné.
est la poussée des moteurs au niveau de la mer.
est le rapport entre la masse volumique de l'air à
l'altitude H et la masse volumique de l'air au niveau de la mer.
est le nombre de Mach de vol.
T SL
T H M
( )
0,568 0,25 1,2
( )3
? M
Du modèle de poussée de Mattingly (E-2.43), la
poussée totale maximale au niveau de la mer se déduit
aisément.
dISPO
a0,6 ? +
1,1 - 0,045 BPR
|
,
W = 0,084 T e
eng eng
|
|
(2.44)
|
|
|
|
(2.45)
2.3.2. Poids et dimensions des moteurs
L'estimation de la poussée maximale au niveau de la
mer permet par la suite de déterminer le poids et les dimensions du
moteur. Raymer (2006) propose les relations suivantes pour se faire.
39
(2.46)
(2.47)
Où :
[lb] est le poids d'un moteur en livre.
[in] est la longueur d'un moteur en pouce. [in] est le
diamètre d'un moteur en pouce. [lb] est la poussée d'un moteur au
décollage.
est le nombre de Mach maximal. est le taux de dilution.
V =
V
min ()max
L
D ? S C
thrust D
0,
W k 2.3.3. Altitude de vol au
maximum de distance
Lorsque l'avion vole à finesse maximale, la
poussée est minimale. Cette vitesse qui minimise
la poussée est donnée par la relation suivante
(Raymer, 2006) :

(2.48)
Par ailleurs, la vitesse qui maximise la distance parcourue
pour un avion à réaction est donnée par la relation
suivante (Raymer, 2006) :

(2.49)
Sachant que la densité de l'air varie avec l'altitude,
il est possible de construire la courbe d'évolution de la vitesse de
croisière au maximum de distance, en fonction de l'altitude de vol. Les
équations (2.50) et (2.51) donnent respectivement l'expression de la
densité de l'air dans la troposphère (entre 0 et 11 km) et la
stratosphère (entre 11 et 20 km).
40
(2.50)
(2.51)
Où :
[kg/m3] est la densité de l'air au niveau de
la mer.
[K/m] est le taux de variation de la température en
fonction de l'altitude
[m] est l'altitude de vol.
[K] est la température de l'air au niveau de la mer.
[m/s2] est la constante gravitationnelle sur terre.
[J/kg/K] est la constante des gaz parfaits.
[kg/m3] est la densité de l'air à la
tropopause. [K] est la température de l'air à la tropopause. [m]
est l'altitude à la tropopause.
2.4. Design de la surface verticale et du train
d'atterrissage
Cette rubrique présente la méthodologie
utilisée pour le dimensionnement de la surface verticale du BWB, ainsi
que de son train d'atterrissage.
2.4.1. Design de l'empennage vertical
Les avions de type BWB ne possèdent pas d'empennage
conventionnel tel que pour les avions classiques de configuration TAW. En
effet, les BWB n'ont pas besoin d'empennage horizontal; par conséquent,
leur empennage se réduit aux surfaces verticales. L'empennage vertical
est la composante permettant de contrôler les mouvements latéraux
de l'aéronef.
41
2.4.1.1. Procédure de design de l'empennage
vertical
Les paramètres qui doivent être
déterminés au cours du processus de design de la surface
verticale sont les suivants (Sadraey, 2012) :
- Surface de l'empennage (Sv) ;
- Longueur de bras de levier (lv) ;
- Type de profil de la section ;
- Allongement (ARv) ;
- Effilement (ëv) ;
- Corde à l'extrémité (Ctv) ;
- Corde à la racine (Crv) ;
- Corde moyenne aérodynamique (MAC) ;
- Envergure (bv) ;
- Angle de flèche .
Par ailleurs, l'étude de Larkin (2017) sur la
stabilité des BWB recommande une inclinaison de
la surface verticale d'un angle par rapport à la
direction verticale, afin d'améliorer la
stabilité de l'appareil.
La figure ci-dessous illustre la procédure de design
suivie pour le dimensionnement de l'empennage vertical.
42
Déterminer l'allongement, l'effilement et
l'angle de flèche
Identifier et prioriser les requis du design
Sélectionner le coefficient d'empennage
(Cv)
Déterminer l'angle de dièdre si
Déterminer l'envergure, la corde à la racine,
à
l'extrémité et moyenne
Choisir la position de l'empennage et
déterminer la longueur du bras de levier
(lv)
Choisir la configuration de l'empennage
Déterminer l'air totale de l'empennage
Choisir le type de profil de la section
non
Requis de design
satisfaits ?
nécessaire
Vérifier la stabilité
(statique et dynamique)
de l'avion
Fin du design
Figure 2.3 : Procédure de design la surface verticale
(adapté de Sadraey, 2012)
oui
43
2.4.1.2. Détermination des paramètres de
l'empennage vertical
La figure ci-après présente les paramètres
types d'un empennage vertical classique.
S = C
V V
b S
w w
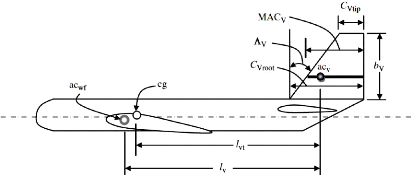
Figure 2.4 : Paramètres d'empennage vertical (Sadraey,
2012)
CV = 0,0242
L'aire de la surface verticale s'obtient à l'aide de
la relation suivante (Sadraey, 2012 ; Raymer, 2006) :
lV (2.52)
Avec :
la surface totale de l'empennage vertical.
l'envergure de l'aile principale.
la surface alaire (surface projetée de l'aile) ;
la longueur du bras de levier (longueur entre le quart de corde
l'aile principale et le quart de corde l'empennage vertical).
Larkin (2017) dans ses travaux montre que pour un BWB, la
surface verticale est optimale
pour un coefficient de volume et un angle d'inclinaison (Larkin
et al,
2017). L'empennage vertical étant une demi-aile, son
envergure s'obtient par la relation :
(2.57)
44
(2.53)
Avec :
l'envergure de l'empennage vertical.
l'allongement de l'empennage vertical, compris entre 1,3 et 2,0
dans la catégorie d'avion
générale (Raymer, 2006).
? + + ?
2 1 A V A V
C = ?
C ?
V rV
3 ? + ?
1 A V
La corde moyenne aérodynamique se déduit par la
relation suivante :
(2.54)
La corde à la racine se déduit de
l'équation suivante :
2
(2.55)
Avec :
la corde à la racine de l'empennage vertical.
l'effilement de l'empennage vertical, compris entre 0,3 et 0,6
dans la catégorie d'avion générale (Raymer, 2006).
Connaissant l'effilement et la corde à la racine, la
corde à l'extrémité est déduite par
l'équation suivante :
(2.56)
En assumant que l'empennage vertical est de forme droite
trapézoïdale, l'angle de flèche au
bord d'attaque est donné par la relation suivante :
? -
? = ?
arctan rV
C C tV
LE , V
b v ?
45
2.4.2. Design du train d'atterrissage
Le train d'atterrissage assure la liaison entre l'avion et le
sol ; c'est la composante grâce à laquelle les mouvements de
l'avion au sol sont possibles. Ces mouvements comprennent les manoeuvres telles
que : le taxi dans la zone aéroportuaire, le roulage dans les phases de
décollage et d'atterrissage, l'amortissement de l'impact d'atterrissage,
le freinage, etc.
2.4.2.1. Configuration du train d'atterrissage
La plupart des avions commerciaux et de combat utilisent un
train d'atterrissage rétractable (dans le fuselage et/ou dans l'aile) de
type tricycle (Corke, 2003). Contrairement aux trains d'atterrissage fixes, les
trains rétractables présentent l'avantage de diminuer la
trainée aérodynamique pendant le vol lorsqu'ils sont
escamotés à l'intérieur de l'aéronef.
lng
Dans le cadre de ce travail, le choix du type de train
d'atterrissage pour le BWB se fera en s'inspirant des avions historiques
à tube et aile (TAW) de taille comparable.
Par ailleurs, le train d'atterrissage doit être
convenablement disposé autour du centre de gravité de l'avion,
afin que celui-ci soit en équilibre au sol. La figure 2.5 illustre un
avion au sol vu de profil. Howe (2000) recommande que les localisations par
rapport au centre de gravité des trains avant et arrière soient
contraintes par la relation géométrique suivante :
(2.58)
Où :
lmg
est la distance entre le train avant et le centre de
gravité de l'avion. est la distance entre le train arrière et le
centre de gravité de l'avion.
Figure 2.6 : Positionnement transversal et vertical du train
d'atterrissage par rapport au centre de gravité (Howe, 2000)
46
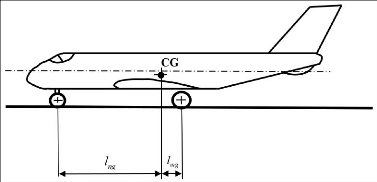
Figure 2.5 : Positionnement longitudinal du train
d'atterrissage par rapport au centre de
gravité (Howe, 2000)
Howe (2000) propose de même, dans le plan en
élévation, les limites de disposition des trains avant et
arrières par rapport à la ligne centrale au sol de l'avion d'une
part, et par rapport à la position verticale du centre de gravité
d'autre part. Le positionnement du train d'atterrissage de l'avion dans le plan
en élévation est donné par la figure 2.6.
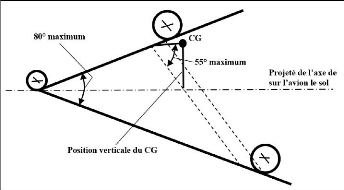
47
2.4.2.2. Dimensionnement des roues du train
d'atterrissage
La taille de roue du train d'atterrissage est proportionnelle
au poids de l'avion. Spécifiquement, la taille de la roue principale est
estimée en assumant que celle-ci supporte 90% du poids total de l'avion
(Corke, 2003). Cette estimation est faite en utilisant des formules empiriques
basées sur les approximations statistiques de données
historiques.
Le diamètre et la largeur de la roue principale se
calculent à l'aide de la relation suivant (Corke, 2003) :
ou (2.59)
Avec :
Où :
[in] est le diamètre de la roue principale.
[in] est la largueur de la roue principale.
[lb] est le poids supporté par une roue principale.
[lb] est le poids total de l'avion.
est le nombre total de roues principales.
Les coefficients A et B dépendent du paramètre
calculé (diamètre ou largeur) d'une part, et de la
catégorie d'avion d'autre part. Pour un avion de ligne, le calcul du
diamètre de la roue
s'effectue avec : et . La largeur de la roue qu'en à
elle se calcule avec
et (Corke, 2003, p.100). Une fois la taille de la roue du
train
d'atterrissage principal déterminée, la taille
de la roue avant (roue de nez) est déduite. Raymer (2006)
préconise que la taille de la roue de nez soit définie au moins
à 60% et au plus à 100% de la taille de la roue principale.
48
2.5. Estimation du coefficient de trainée à
portance nulle du BWB
Dans ses travaux, Velazquez (2020) évalue le
coefficient de trainée à portance nulle du BWB en ne
considérant que le corps aérodynamique de l'avion (fuselage et
aile extérieure). Les trainées de friction dues au groupe moteur
(nacelle et pylon) et à l'empennage vertical n'ont pas été
prises en compte. Il est donc nécessaire d'estimer le coefficient de
trainée généré par ces éléments, afin
d'obtenir le coefficient global de trainée à portance nulle de
l'avion complet.
neng
2.5.1. Inventaire des sources de trainée n VT
En opération, chaque composant externe de l'avion est
une source de trainée. Pour un avion complet, le coefficient de
trainée se détermine par sommation des coefficients de
trainée de chaque composant pris individuellement (Corke, 2003 ; Raymer
2006). Dans le cas du BWB, la trainée est essentiellement
générée par le fuselage, l'aile extérieure, le
groupe de propulsion et l'empennage vertical. Ainsi, le coefficient global de
trainée à portance nulle du BWB peut être estimé
à l'aide de la relation suivante :
CD0 , pylon
C D0 , VT
(2.60)
Où :
est le coefficient de trainée à portance nulle du
fuselage et de l'aile extérieure évalué
par Velazquez à l'aide de la simulation
numérique.
est le coefficient de trainée à portance nulle de
la nacelle d'un moteur.
est le coefficient de trainée à portance nulle du
pylon d'un moteur. est le coefficient de trainée à portance nulle
d'une surface verticale. est le nombre de moteur.
est le nombre de surfaces verticales.
49
2.5.2. Estimation du coefficient de trainée
parasite d'un élément
Corke (2003) et Raymer (2006) donnent l'expression
générale de la trainée parasite d'un composant (j) externe
(faisant obstacle au flux d'air) de l'avion comme suit :
(2.61)
Où :
est me coefficient de friction de la plaque plane
assimilée au composant.
est le facteur de forme du composant.
est le facteur d'interférence du composant.
est la surface mouillée du composant.
est la surface de référence de l'avion (surface
alaire).
Détermination du coefficient de friction
:
Le coefficient de friction utilisé pour déterminer
vient des études sur les plaques planes. Il
dépend du nombre de Reynolds, du nombre de Mach et de la
rugosité (Corke, 2003 ; Raymer
2006).
Re =
Pour un écoulement laminaire, le coefficient de friction
a pour expression :
(2.62)
Avec est le nombre de Reynolds défini comme suit :
r
?
(2.63)
Où :
[m/s] est la vitesse du flux d'air par rapport au composant.
[m2/s] est la viscosité cinématique de l'air.
50
[m] est une longueur de référence qui
dépend du composant. Pour une aile Corke (2003) et
Raymer (2006) suggèrent de prendre : . Pour tout autre
composant, sera pris
comme étant la longueur du composant dans le
sens de l'écoulement.
Pour un écoulement turbulent, le coefficient de friction
a pour expression :
(2.64)
Où est le nombre de Mach de vol.
Corke (2003) suggère par ailleurs que l'écoulement
soit considéré comme turbulent lorsque :
Détermination du facteur de forme :
Le facteur de forme est introduit afin d'estimer l'augmentation
du coefficient de friction au-dessus de la trainée de viscosité,
dû à la séparation de l'écoulement (Corke, 2003).
Pour l'aile, l'empennage et le pylon, le facteur de forme
s'exprime comme suit (Corke, 2003 ; Raymer 2006) :
4
0?
FF
wing =[1+,6 C ? + 100 (t J
·
[1,35Mâ,18 (cos ?m )0,28
( )m m m
Où :
(x c)m est la position sur la
corde, du point d'épaisseur maximale.
(t O. est l'épaisseur
relative maximale du profil.
?mest l'angle de flèche à
épaisseur maximale.
|
(2.65)
|
|
Où : est la longueur totale de la nacelle.
51
Pour la nacelle, le facteur de forme se détermine
à l'aide de la relation suivante (Raymer 2006) :
S ? 2,003 ? S
( t c )m ? 5%
Où :
(2.66)
est le diamètre maximal de la nacelle.
est la longueur de la génératrice du cône du
diffuseur d'entrée d'air.
? S ref ? 1,977 + 0,52 t
c ?
( )
( t c )m ? 5%
Détermination du facteur d'interférence
:
La trainée parasite croit avec l'interférence
mutuelle entre les composants (Raymer, 2006).
Pour la nacelle montée directement sur l'aile,
l'interférence est . Si la nacelle est
montée sous l'aile à une distance avoisinant son
diamètre (Raymer, 2006).
Pour un empennage en V, l'interférence est d'environ 3%,
soit : . Pour un
empennage en H, l'interférence est d'environ 8%, soit : .
Pour les empennages
conventionnels, l'interférence est prise de 4 à 5%
(Raymer, 2006).
wet airfoil ref
airfoil ? m ?
Détermination de la surface mouillée
:
La surface mouillée est la surface totale du composant en
contact avec le flux d'air.
? ?D L + X D
( nacelle nacelle 0,5
nacelle
2 )
Pour les composants de type aile tels que l'empennage et le
pylon, une approximation de la surface mouillée est donnée par
Corke (2003).
si (2.67)
Pour la nacelle, la surface mouillée sera estimée
comme étant la surface d'enveloppe totale.
L nacelle
Swet
nacelle
(2.69)
52
2.6. Estimation des performances de l'avion
Cette section présente la méthodologie
utilisée pour l'estimation des paramètres de performances du BWB,
à l'instar des distances de décollage et d'atterrissage, des
performances en montée et en descente, du facteur de charge et du
domaine de vol.
2.6.1. Estimation des distances de décollage et
d'atterrissage
Les distances de décollage et d'atterrissage d'un
aéronef dépendent de plusieurs paramètres de performances
intrinsèques à l'appareil à l'instar du coefficient de
portance maximal, de la charge alaire et du ratio poussée sur poids.
Ainsi, à partir des paramètres aérodynamiques et de
poussée de l'avion, une estimation des distances de décollage et
d'atterrissage peut être faite.
2.6.1.1. Estimation de la distance de décollage
(Corke, 2003)
Pendant la phase de décollage, l'avion
accélère d'une vitesse nulle à une vitesse de
décollage VTO, puis décolle de la piste pour atteindre
une altitude minimalement supérieure à la hauteur d'obstacle de
référence Hobstacle. La distance pour accomplir ce
décollage est STO.
Pour un avion commercial, la vitesse et la hauteur d'obstacle
minimale de décollage sont données par la "Federal Aviation
Regulations" (FAR) tel qu'il suit (FAR Part 25) :
et [ft] (2.70)
De façon détaillée, le décollage se
subdivise en quatre phases distinctes à savoir :
- Le roulage au sol ;
- La rotation ;
- La transition ;
- La montée.
La figure ci-après présente une illustration de
chacune de ces phases de décollage.
53
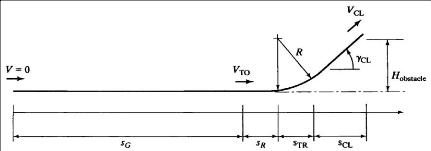
Figure 2.7 : Schéma d'illustration des phases de
décollage (Corke, 2003)
La distance totale de décollage est la somme des
distances de chacune des quatre phases.
(2.71)
? ? ? ?
T T
? ?=? ?
? ? ? ?
W W max
· Distance de roulage au sol (Corke, 2003)
La distance de roulage ( ) est déterminée en
assumant que le ratio poussée-poids est
maximal à .
dV 2 2
VTO 1 ? f V ?
2 TO
= = ? + ?
? 2 ln 1
0 f +
f V 2 gf
1 2 2 ? f 1 ?
C'est-à-dire : à
Et se calcul à l'aide de l'expression ci-après
:
? ?
f 1 = ? - ?
Où et sont des coefficients adimensionnels qui se
calculent comme suit :
T
?
(2.73)
54
Et,
(2.74)
Avec :
le coefficient de friction en roulement de la piste au
décollage (asphalte sèche).
[slug/cu.ft] la masse volumique de l'air à l'altitude de
décollage.
[lb/ft2] la charge alaire de l'aéronef.
est le coefficient de portance lorsque l'avion roule.
est le coefficient de trainée à portance nulle de
l'avion.
Coefficient de trainée supplémentaire
causée par les volets (slotted flaps).
Le coefficient de trainée supplémentaire
lorsque les trains sont sortis peut être estimé par la relation
empirique ci-après :
Où :
A = A b 2
H
effectif w w w
H w
(2.75)
est la surface frontale projetée des trains
d'atterrissage.
k effectif
=
? A e
effectif effectif
est une fonction de corrélation qui dépend du
poids de l'avion au décollage. A b Le
coefficient d'efficacité d'envergure (keffectif) est
donné par la relation :
w w
(2.76)

Où :
est l'allongement effectif pour le décollage et
l'atterrissage.
[ft] est la hauteur entre l'aile et le sol.
et sont respectivement l'allongement et l'envergure de
l'aile.
55
est le coefficient d'Oswald effectif (Obert, 2009).
V 2
g n
( )
- 1
· Distance de rotation (Corke, 2003)
Pendant la phase de rotation au décollage, l'angle
d'attaque augmente jusqu'à
. Par convention, la durée de la rotation pour un avion
de ligne est de 3 secondes. Pendant cette
manoeuvre, la vitesse de l'avion est de et la distance parcourue
au sol est :
=
(2.77)
· Distance de transition (Raymer, 2006)
Le rayon de courbure durant la transition est donné par
la relation ci-après :
Où :
est la vitesse de transition ;
est le facteur de charge durant la transition ;
[ft/sec2] est l'intensité de la pesanteur.
La distance parcourue pendant la transition est donnée
par l'équation ci-après :
(2.79)
?climb
Où : est l'angle de montée au décollage.
· Distance pendant la montée (Corke, 2003)
La phase de montée commence à la fin de la
transition et se termine une fois que l'avion a atteint l'altitude prescrite
Hobstacle. Durant cette montée, la distance parcourue est
donnée par la relation ci-après :
56
(2.80)
Où :
[ft] est la hauteur d'obstacle pour un avion civil ;
[ft] est la hauteur atteinte durant la transition.
2.6.1.2. Estimation de la distance d'atterrissage (Corke,
2003)
De même que le décollage, l'atterrissage se
déroule en quatre phases distinctes à savoir :
- L'approche ;
- La transition ;
- La phase de roue libre ;
- Le freinage.
La figure ci-après présente une illustration de
chacune de ces phases d'atterrissage.
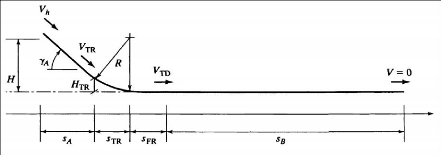
Figure 2.8 : Schéma d'illustration des phases
d'atterrissage (Corke, 2003)
· Distance pendant la descente
La descente se fait à vitesse constante avec moteur
éteint (poussée est nulle) de la hauteur d'obstacle de 50 pieds
jusqu'à la hauteur de transition HTR. Pour les avions de
transport, la valeur absolue de l'angle de descente n'est pas supérieure
à 3°.
57
(2.81)
· Distance pendant la transition
Durant la transition, l'avion vole le long d'un arc de cercle
avec un rayon de RTR. Pour un avion commercial, la vitesse pendant la
transition est :
(2.82)
La distance parcourue pendant la transition est donnée
par la relation ci-après :
(2.83)
· Distance de roue libre (Corke, 2003)
Pendant la phase de roue libre à l'atterrissage,
l'avion maintient une vitesse constante de VTD. Par convention, la
durée de la rotation en roue libre pour un avion de ligne est de 3
secondes., la distance parcourue au sol pendant cette manoeuvre est :
[ft] (2.84)
Où :
[ft/s] est la vitesse lorsque l'avion touche le sol.
· Distance de freinage (Corke, 2003)
La distance de freinage pendant l'atterrissage s'obtient par la
même démarche que la distance
de roulage ( ) au décollage. Durant cette phase, le
pilote applique les freins jusqu'à l'arrêt
de l'avion et la distance parcourue se calcul à l'aide
l'expression ci-après :
2 2
- 1 dV
0 1 ? f V
2 TD
S = = ? +
? 2 ln 1
B g f f V
2 TD
V + 2 gf
1 2 2 ? f 1
Où et sont des coefficients adimensionnels qui se
calculent comme suit :
W
(2.89)
58
(2.86)
Et,
(2.87)
Si les moteurs sont équipés d'inverseurs de
poussée , alors la poussée inverse est telle que :
est le coefficient de friction en roulement de la piste à
l'atterrissage.
La distance totale d'atterrissage est la somme de chacune des
distances des quatre phases. En plus de cela, la FAR-25 recommande de majorer
la distance totale d'atterrissage d'un facteur de 1,667, pour prendre en compte
les différences entre les pilotes (Raymer, 2006).
(2.88)
2.6.2. Performance en montée et en descente
Pendant la montée ou pendant la descente, les
paramètres les plus importants sont : le taux de montée
(respectivement de descente), la vitesse et l'angle de montée
(respectivement de descente).
2.6.2.1. Performance en montée
Pour un aéronef, le taux de montée n'est autre
que la composante verticale de la vitesse ascensionnelle de l'appareil. Ainsi,
pour un angle de montée ?climb, le taux de montée est
déterminé comme suit (Raymer, 2006) :
? - ?
T D
RC = V sin ?
V
climb = ? ?
? ?
59
Sachant que :
et
L'expression du taux de montée devient :
=
W S T
3 P C ? W ? ?
D 0, bwb ? ?
(2.90)
La vitesse à laquelle le taux de montée est
maximal est donnée par la relation suivante (Raymer, 2006) :
2 1
r ?
1 + ? ? + 12 C k ?
D 0, bwb
W ?
Vmax
climb
RD = V sin Y =
sin Y
|
|
|
|
T
W 2cosYdes
des des des
S PCL
|
(2.91)
|
|
|
|
|
|
|
2.6.2.2. Performance en descente
Pour un aéronef, le taux de descente est la composante
verticale de la vitesse de descente de l'appareil. Pour un angle de descente
?des, le taux de descente à poussée nulle est
déterminé comme suit (Corke, 2003) :
D CD
sin I = COs I =
COs I
des des des
L CL
(2.92)
La combinaison des équations (2.92) et (2.93) permet
d'obtenir une expression plus générale du taux de descente.
Par ailleurs ,
60
La vitesse à laquelle le taux de descente est minimal
s'obtient à l'aide de l'équation suivante : (Raymer, 2006) :
n max = 3,8
2.6.3. Facteur de charge et domaine de vol de l'avion
Les conditions de vol d'un aéronef sont
définies par une multitude de paramètres intrinsèques et
extrinsèques à l'instar de la vitesse, la position du centre de
gravité, l'attitude, la direction et l'intensité du vent, etc.
Pour un vol économique et sécuritaire, la variation de ces
paramètres dans une limite règlementaire conditionne le domaine
de vol de l'avion.
Le diagramme V-n constitue une synthèse graphique du
domaine de vol d'un aéronef. Concrètement, il s'agit d'une
enveloppe dans laquelle l'avion peut voler en toute sécurité, et
dans le respect des exigences réglementaires RAC/FAR.
n min
WTO 10000
Facteur de charge limite réglementaire
:
Pour les avions type commerciaux, le Règlement de
l'Aviation Canadien (RAC, 2019) stipule
que le facteur de charge de manoeuvre limite positif
n doit être compris entre une valeur
minimale nmin et une valeur maximale
nmax, avec :
2,1 +
+
24000 (2.96)
WTO
Et,
[lb] est le poids maximal de l'avion au décollage.
Le facteur de charge de manoeuvre limite négatif ne
doit pas être inférieur à 0,4 fois le facteur de charge
positif, pour les catégories d'avion de ligne.
61
Variation du facteur de charge avec la vitesse
:
À une altitude constante, le facteur de charge peut
être exprimé en fonction de la vitesse de vol par la relation
suivante :
(2.97)
À basse vitesse, le facteur de charge est
limité par le coefficient de portance maximal. Ainsi, pour les basses
vitesses, la relation (2.97) précédente devrait être
remplacée par l'équation ci-après :
(2.98)
est le facteur de charge maximal atteignable, lorsque En
définitive, le facteur de charge à considérer est :
(2.99)
2.7. Équilibre et stabilité de l'avion
Cette section présente l'approche théorique
nécessaire à l'analyse de la stabilité et de
l'équilibre d'un aéronef. Ainsi, les notions de stabilité,
de marge statique et d'équilibre de l'avion seront
présentées.
2.7.1. Notions de stabilité d'un avion
Pour un avion, la stabilité renvoie à la
capacité qu'à ce dernier à revenir à l'état
de vol stable initial après avoir subi une perturbation. La
stabilité d'un avion est une propriété d'extrême
importance pour sa validation en conception. En réalité, aucun
avion n'est rigoureusement stable ; ils doivent cependant posséder un
niveau de stabilité acceptable, pour garantir un pilotage ergonomique
d'une part, et le confort des passagers d'autre part. plus un avion est
(2.100)
62
stable, plus il est facile à piloter. A contrario, un
avion trop stable sera difficile à manoeuvrer. Ainsi, les gros avions de
ligne sont conçus pour être très stables, ce qui n'est pas
le cas avec les avions de chasse ou d'entraînement où une plus
grande manoeuvrabilité est nécessaire. Avec les avions
conventionnels à tube et aile, l'empennage horizontal joue un rôle
primordial pour assurer la stabilité de l'appareil. En dépit de
leurs forts potentiels aérodynamiques, les BWB présentent des
problèmes de stabilité assez compliqués dus au faible bras
de moment et aux mauvaises caractéristiques d'assiette (Okonkwo, 2016).
Ceci s'explique en grande partie du fait de l'absence d'empennage
horizontal.
Il existe deux formes de stabilité que sont la
stabilité statique et la stabilité dynamique. La stabilité
statique d'un avion est communément interprétée pour
décrire sa tendance à converger vers l'état
d'équilibre initial suite à une petite perturbation de l'assiette
(trim). La stabilité dynamique quant à elle décrit le
mouvement transitoire impliqué dans le processus de
rétablissement de l'équilibre suite à la perturbation
(Cook, 2012). Ainsi, la stabilité statique renvoie aux actions de
contrôle requises, afin d'établir les caractéristiques
nécessaires pour garantir l'équilibre de l'avion. Bien entendu,
la stabilité dynamique est également importante, en ce sens
qu'elle détermine en grande partie les caractéristiques des
mouvements transitoires de l'avion, suite à une perturbation autour de
sa position de vol stabilisé.
Ce projet se limitera à l'évaluation de la
stabilité statique longitudinale du BWB en déterminant les marges
statiques et les caractéristiques d'assiette.
2.7.2. Marge statique et conditions de
stabilité
La marge statique est un concept utilisé pour
caractériser le degré de stabilité statique et de
contrôlabilité d'un avion. La marge statique est définie
comme étant la distance entre le centre de gravité de l'avion et
son point neutre. Le moment de tangage d'un avion sans empennage, dans un vol
équilibré quasi stable de masse constante en atmosphère
normale et sans effets de compressibilité pour de petits angles
d'attaque est donné par l'équation suivante (Okonkwo, 2016) :
? - ?
X X
cg np
C = C + ?
C
M , cg M 0, cg
L ?
? c ?
63
L'équation (2.101) donne l'expression du coefficient des
moments d'un BWB, par rapport au
centre de gravité. La dérivée de cette
expression par rapport à l'angle d'attaque permet
En posant et , l'équation (2.100) devient :
SCM , cg
M a Sa
(2.101)
Où :
est le coefficient de moment par rapport au centre de
gravité.
est le coefficient de moment à portance nulle par rapport
au centre de gravité.
et sont respectivement les distances du centre de gravité
et du point neutre, par
rapport au nez de l'avion.
est la corde moyenne aérodynamique de l'avion.
C M ?
K = - = - -
( )
h h
n cg np
La dérivée de l'équation (2.101) par
rapport à donne l'équation (2.102).
(2.102)
C=
Avec : et
La marge statique est définie par la relation suivante
:
CL? (2.103)
est généralement donnée en pourcentage.
Pour que l'avion soit stable, la marge statique
doit être positive ; c'est-à-dire que le centre
de gravité devrait se situer devant le point neutre. Si le centre de
gravité se trouve derrière le point neutre, l'avion est
jugé longitudinalement instable. Pour un avion de transport, la marge
statique positive avec le centre de gravité maximum arrière doit
être comprise entre 5 et 10 % (Raymer, 2006).
2.7.3. Coefficient de moment et équilibre de
l'avion
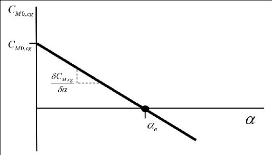
64
d'obtenir un coefficient connu sous l'appellation de «
coefficient de stabilité longitudinal », tel que
présenté ci-après :
(2.104)
Où :
|
est le coefficient de stabilité longitudinale.
|
|
Au regard des équations (2.101) et (2.104), et sachant
que le coefficient de portance de l'avion varie linéairement en fonction
de l'angle d'attaque, il apparait clairement que les coefficients de moment et
de stabilité longitudinale eux aussi varient linéairement en
fonction de l'angle d'attaque. L'équation (2.105) ci-dessous donne
l'expression de cette droite.
(2.105)
La figure 2.9 présente la variation du coefficient de
moment avec l'angle d'attaque.
Figure 2.9 : Variation du coefficient de moment avec l'angle
d'attaque (cas stable)
Sur cette figure représente l'angle d'attaque absolue
à l'équilibre de l'avion, pour une
condition de vol donnée. À cet angle, les
forces et les moments agissant sur l'avion se trouvent dans un état
d'équilibre.
M0
(2.108)
65
Par ailleurs, les conditions nécessaires pour la
stabilité d'un avion peuvent être résumées à
la satisfaction des équations suivantes (Cook, 2012) :
et (2.106)
Explicitement, cela revient à dire que :
- Le coefficient de moment à portance nulle doit
être positif ;
- Le coefficient de stabilité longitudinale doit
être négatif ;
- L'angle d'attaque à l'équilibre doit être
compris dans la plage des angles de vol de
l'avion.
Cependant, pour pouvoir obtenir l'équation explicite
de la droite de coefficient de moment exprimée par les équations
(2.102) et (2.105) précédents il faudrait au préalable,
déterminer le coefficient de moment à portance nulle de l'avion
et, par la suite trouver une expression de son coefficient de portance en
fonction de l'angle d'attaque.
À l'équilibre, la somme des moments de tangage
au centre de gravité de l'avion est nulle. L'équation
d'équilibre des moments s'écrira alors comme suit :
(2.107)
Où :
est le moment de tangage de l'avion à portance nulle.
est la force de portance générée par le
corps central de l'avion.
est la force de portance générée par l'aile
extérieure de l'avion.
=
( )
L ow
L'équation (2.107) peut être
réécrite, pour obtenir l'équation (2.108), puis
l'équation (2.109) :
M L
( ) M
cg fus cg
( ) ? V S c
2 ( ) ? V S c
2 2
1 2 1 2 ( 1 2 ) ? V S
c
ref ref ref
66
2
?
?
(2.112)
(2.109)
À partir de l'équation (2.109), la
déduction de l'expression du coefficient de moment à portance
nulle est directe.
(2.110)
Où :
et sont respectivement les coefficients de moment à
portance nulle du corps
central et de l'aile extérieure.
et sont respectivement les cordes aérodynamiques
moyennes du corps central et de
l'aile extérieure.
et sont respectivement les surfaces plan du corps central et de
l'aile extérieure.
I
cos 2 AR A ?
(
)
C ?
basse . vitesse ?
+
AR 2cos A ?
En général, le coefficient de moment à
portance nulle est connu pour les profils d'aile. Pour une aile complète
(c'est-à-dire en trois dimensions) d'allongement et d'angle de
flèche connus, le coefficient de moment à portance nulle peut
être déterminé à partir de la relation d'ajustement
donnée par l'équation (2.111) pour de basses vitesses subsoniques
(Raymer, 2006).
C = ?
m 0,3D m 0,2D
LE
LE
(2.111) Pour des vitesses subsoniques élevées
(proche de Mach 0,8) les effets du transsonique entrent en jeu et augmentent le
moment de tangage. Dans ce cas, le coefficient de moment à portance
nulle augmenterait d'environ 30% (Raymer, 2006). L'équation (2.111)
ci-dessus deviendrait alors :
AR cos A
?
? LE
( )
C = ? ?
1,3 C
m 0,3D ? m
0,2D
Mach 0.8 ? +
AR 2cos ALE
67
Pour ce qui est de la droite de portance de l'avion, l'on
peut remarquer que les forces de portance agissant sur la BWB au complet
proviennent du corps central et de l'aile extérieure. Elles peuvent donc
être exprimées comme suit :
S S
fuS ow
C =
C +
C
L , bwb L ,fuS
L , ow
S S
ref ref
(2.113)
Pour une condition de vol donnée, l'expression
générale de la force de portance est donnée par
l'équation suivante :
(2.114)
Ainsi, la combinaison des équations (2.113) et (2.114)
permet d'obtenir l'expression du
coefficient de portance du BWB, en fonction des coefficients de
portances du fuselage ( )
et de l'aile extérieure ( ), eux même fonction de
l'angle d'incidence.
Les coefficients et seront explicitement exprimés dans
la section suivante, en
fonction de l'angle d'attaque ; ce qui permettra par la suite
de déduire une expression du coefficient de portance du BWB en fonction
de .
L'objectif de ce chapitre était dans un premier temps
de présenter la méthodologie utilisée pour estimer la
masse du BWB ainsi que la poussée des moteurs et le dimensionnement des
surfaces verticales. Par la suite, la démarche d'évaluation des
performances de l'avion à basse vitesse et en croisière a
été présentée. Dans le chapitre qui suit, les
résultats de l'estimation de la masse de l'avion, des
caractéristiques des moteurs, du design des surfaces verticales ainsi
que des performances de l'appareil seront présentés et
discutés.
68
CHAPITRE 3
RÉSULTATS ET DISCUSSIONS
Ce chapitre présente respectivement les
résultats de calcul de la masse détaillée de l'appareil,
du dimensionnement du groupe de propulsion, du dimensionnement de la surface
verticale et du train d'atterrissage. Par la suite, les résultats de
l'évaluation des performances de l'appareil à l'instar des
distances de décollage et d'atterrissage, des taux de montée et
de descente, sont également présentés.
3.1. Résultats de l'évaluation de la masse
du BWB
L'évaluation détaillée de la masse du
BWB a été réalisée suivant l'algorithme
présenté à la section 2.2. L'estimation de la masse de
l'aile extérieure a été effectuée à partir
des relations empiriques de Howe (2000), Kundu (2019) et Torenbeek (2013)
respectivement, afin d'apprécier la valeur de la masse prédite,
selon le modèle d'aile considéré.
Le tableau 3.1 ci-après est une synthèse
détaillée de la prédiction de la masse du BWB, pour chaque
groupe de composants.
70
Tableau 3.1 : Prédiction de masse
détaillée du BWB
GROUPE
|
DÉTAIL DES ÉLÉMENTS
|
MASSE
[kg]
(modèle
d'aile
de
Howe)
|
MASSE
[kg] (modèle d'aile de Kundu)
|
MASSE
[kg]
(modèle
d'aile
de
Torenbeek)
|
ÉLÉMENTS STRUCTURAUX
|
Structure de la Cellule
|
|
2630
|
2754
|
3468
|
|
604
|
606
|
614
|
|
3337
|
3339
|
3355
|
|
1205
|
1207
|
1213
|
|
1620
|
1628
|
1674
|
|
|
5850
|
5859
|
5910
|
|
|
767
|
767
|
767
|
|
560
|
560
|
560
|
|
85
|
85
|
85
|
|
291
|
291
|
291
|
|
97
|
97
|
97
|
|
136
|
136
|
136
|
|
15
|
15
|
15
|
|
11
|
11
|
11
|
|
2918
|
2933
|
3015
|
|
20128
|
20288
|
21212
|
CHARGE UTILE PAYANTE
|
Passagers, y compris les bagages à main
|
8165
|
8165
|
8165
|
|
2688
|
2688
|
2688
|
|
1200
|
1200
|
1200
|
|
12053
|
12053
|
12053
|
ÉLÉMENTS
OPÉRATIONNELS
|
Équipage
|
425
|
425
|
425
|
|
208
|
209
|
215
|
|
633
|
634
|
640
|
CARBURANT
|
Carburant dans l'aile (50%) Carburant dans le fuselage (50%)
|
8 876
|
8 920
|
9 171
|
MASSE MAXIMALE AU DÉCOLLAGE (MTOW)
|
41 690
|
41 895
|
43 076
|
|
71
Au regard des résultats présentés dans
le tableau 3.1, il apparait que les masses totales prédites avec les
modèles d'aile de Howe (2000) et de Kundu (2019) sont très
proches. L'erreur relative absolue entre les deux est un peu moins que 0,5%,
donc quasi nulle. Par ailleurs l'erreur relative absolue entre les
prédictions de Howe (2000) et de Torenbeek (2013) est d'environ 3,4%,
donc moins de 5%, ce qui semble raisonnable.
Cependant, les modèles d'aile de Howe (2000) et de
Kundu (2019) aboutissant à une même prédiction de masse
d'une part, et étant donné que le modèle de Kundu est le
plus récent d'autre part, la masse finale du BWB sera
considérée comme étant celle prédite par Kundu
(2019), d'autant plus que ce modèle est celui qui prend en compte le
plus grand nombre de paramètres, pour l'estimation de la masse de
l'aile.
Le tableau 3.2 présente la répartition de la
masse de l'avion. Cette structure de décomposition de la masse est
très rependue dans le domaine aéronautique ; elle servira donc de
base pour la comparaison du BWB à d'autres avions.
Tableau 3.2 : Répartition de la masse du BWB
Paramètre
|
Notation
|
Valeur
|
Unité
|
Charge utile payante
|
CU
|
12 053
|
kg
|
Masse maximale de carburant
|
MFW
|
8 920
|
kg
|
Masse à vide sortie usine
|
MEW
|
20 288
|
kg
|
Masse à vide en opération
|
OEW
|
20 923
|
kg
|
Masse maximale à l'atterrissage
|
MLW
|
36 273
|
kg
|
Masse maximale sans carburant
|
MZFW
|
32 975
|
kg
|
Masse maximale au décollage
|
MTOW
|
41 895
|
kg
|
Facteur de structure-usine
|
fsempty
|
0,484
|
-
|
Facteur de structure opérationnel
|
fsoew
|
0,499
|
-
|
|
Ainsi, le facteur de structure opérationnel (fsoew) du
BWB serait de 0,50 soit 10% plus petit que le facteur de structure moyen des
avions conventionnels TAW de taille comparable (cf. annexe 1). Cette
différence montre à suffisance que par rapport aux avions
conventionnels, le BWB a une capacité d'emport plus grande.
72
Par ailleurs, en comparaison avec les BWB
présentés à la section 1.1, le facteur de structure
à vide de l'avion (fsempty) est 18,3% supérieur à celui du
bombardier furtif B-2A Spirit, et 15,4% inférieur à celui du
Northrop YB-35.
3.2. Coefficient de trainée à portance nulle
du BWB
Comme mentionné dans la section 2.5
précédente, le coefficient de trainée à portance
nulle du BWB au complet s'obtient par sommation des coefficients de
trainée du fuselage, de l'aile extérieure, du groupe de
propulsion (nacelle et pylon) et des surfaces verticales. Par ailleurs, du fait
de l'interdépendance entre le coefficient de trainée parasite de
l'avion (à travers les coefficients de trainée de la nacelle et
du pylon) et les caractéristiques du groupe de propulsion, une boucle de
calcule entre ces deux entités a été nécessaire
pour obtenir des résultats.
Le tableau 3.3 présente les résultats de calcul
du coefficient de trainée à portance nulle de l'ensemble
fuselage-aile extérieure, du groupe de propulsion (nacelle et pylon),
des surfaces verticales, puis du BWB en entier.
73
Tableau 3.3 : Synthèse des résultats de calcul
du coefficient de trainée
à portance nulle
3,192 ?
2,407 ?
10- 5
C D 0 ,
bwb
Paramètre
|
Notation
|
|
Valeur [-]
|
|
Référence
|
Nombre de Reynolds
|
|
|
|
|
|
E-2.63
|
Coefficient de friction
|
|
2 ?
|
(
|
|
|
E-2.64
|
Facteur de forme
|
|
2 ?
|
(
|
|
|
E-2.66
E-2.65
|
Facteur d'interférence
|
|
|
|
|
|
Section 2.5.2
|
Surface mouillée [m2]
|
|
|
|
|
|
E-2.69
E-2.68
|
Coefficient de trainée à portance nulle
|
|
|
|
|
|
Velazquez
(2020)
E-2.61
|
|
|
|
|
|
E-2.60
|
|
4
10-
)
)
Ainsi, avec l'ajout des moteurs et des surfaces verticales,
le coefficient de trainée à portance nulle du BWB serait de
0,0132, soit 11,4% plus élevé que l'estimation faite par
Velazquez (2020).
74
3.3. Performance de la propulsion
La détermination de la poussée maximale des
moteurs est intrinsèquement liée aux conditions de
croisière, à l'instar de la vitesse et de l'altitude de
croisière. Ces deux paramètres ont une incidence directe sur la
traînée que devra vaincre les moteurs pour faire avancer
l'avion.
3.3.1. Altitude de croisière pour une distance
maximale
L'équation (2.49) donne l'expression de la vitesse de
croisière qui maximise la distance parcourue par l'avion, en fonction de
la densité de l'air (et donc de l'altitude). En assumant que l'altitude
de croisière de l'avion se situerait dans la stratosphère, entre
11 et 15 km notamment, la figure ci-après présente la courbe
d'évolution de la vitesse optimale de croisière en fonction de
l'altitude.
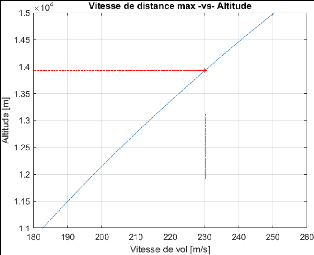
Figure 3.1 : Altitude requise en croisière en fonction
de la vitesse
Ainsi, pour la vitesse de croisière de 230 m/s (755
ft/s) définie dans les requis de conception, l'avion devrait voler
à une altitude de 13 890 mètres afin de maximiser la distance
parcourue. L'altitude de croisière du BWB sera donc fixée
à 13 900 mètres.
75
3.3.2. Poussée requise et poussée disponible
en croisière
Les équations (2.39) et (2.41) donnent respectivement
les expressions de la poussée requise et de la poussée disponible
en croisière, en fonction de la vitesse. Ainsi, avec une vitesse
maximale de 242 m/s en croisière (calculée à partir de
l'équation (2.42), la poussée disponible de l'avion à
l'altitude de croisière (13,9 km) serait de 8125 lbf (35,75 kN).
La figure 3.2 présente la variation de la
poussée requise du BWB en croisière, en fonction de la vitesse de
vol. Sur cette figure, la ligne horizontale orangée représente la
poussée disponible, c'est-à-dire la poussée dont disposent
les moteurs à cette altitude jusqu'à Vmax.
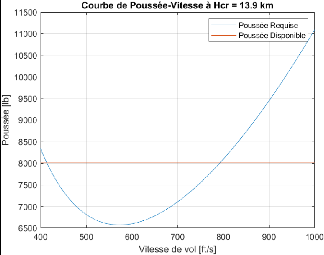
Figure 3.2 : Courbe Poussée-Vitesse du BWB
Le tableau ci-après présente les vitesses
caractéristiques du domaine de vol en croisière du BWB,
déduites à partir de la figure 3.2.
Tableau 3.4 : Vitesses caractéristiques du BWB en
croisière
|
|
|
|
416 ft/s
|
573 ft/s
|
755 ft/s
|
795 ft/s
|
127 m/s
|
175 m/s
|
230 m/s
|
242 m/s
|
|
76
est la vitesse minimale de l'avion en croisière, est la
vitesse de l'avion au minimum
de poussée, est la vitesse optimale de croisière
et est la vitesse maximale de l'avion.
3.3.3. Performance et dimension des moteurs
Assumons que la propulsion de l'aéronef est
assurée par deux moteurs de type turbosoufflante avec un taux de
dilution proche de 5 :1.
Connaissant l'altitude de vol, le nombre de Mach et la
poussée disponible en croisière, la relation (2.44) de Mattingly
(1987) permet de déterminer la poussée maximale des moteurs au
niveau de la mer.
Le tableau 3.5 présente les caractéristiques
générales de performance des moteurs du BWB notamment, la
poussée disponible en croisière, la poussée maximale
totale et la consommation spécifique.
Tableau 3.5 : Performances des moteurs du BWB (turbosoufflante)
? ?
? ?
Désignation
|
Notation
|
Valeur en
Impérial
|
Valeur en SI
|
Poussée requise à vitesse de croisière
Poussée disponible en croisière
Poussée maximale totale Poussée maximale unitaire
x2 Consommation spécifique
Rapport "poussée sur poids" en croisière
Rapport "poussée sur poids" au décollage
|
W cr
? ?
T
? ?
? ?
W to
? ?
|
7803
8125
37717
18859
0,60
0,085
0,397
|
lb
lb
lb
lb
lb/lb - h
|
34,34
35,75
167,77
82,98
|
kN
kN
kN
kN
|
|
|
|
T
La poussée totale nécessaire pour la propulsion
du BWB serait donc de 168 kN au niveau de la mer. En comparaison avec les
avions de taille assimilée tels que le CRJ1000 de Bombardier (129 kN),
le Sukhoi Superjet 100 (154 kN) ou encore le Antonov An-158 (134 kN), cette
valeur de poussée semble élevée, bien que raisonnable. En
effet, le ratio poussée-poids de 0,397 du
77
BWB au décollage est supérieur à tous
ceux des avions TAW de taille comparable présentés en annexe 1,
de même qu'à ceux des BWB présentés à la
section 1.1, en occurrence le B-2A, les X-48B et X-48C. Sachant que les limites
de vitesses et altitude de vol du BWB sont assez proches de ceux des avions TAW
comparables, cette valeur assez élevée du ratio
poussée-poids de l'avion pourrait traduire une trainée plus
importante avec du BWB qu'avec les avions conventionnels de taille
comparable.
Connaissant la poussée maximale
développée par un moteur, les relations (2.45) à (2.47)
permettent de déterminer respectivement la masse du moteur, sa longueur
et son diamètre. Ces dimensions permettront d'estimer l'encombrement
à l'arrière de la cellule centrale, où seront
placés les moteurs et les surfaces verticales, tel le cas des BWB X-48B
et X-48C.
Le tableau 3.6 présente le poids et les dimensions
longueur et diamètre estimés du moteur.
Tableau 3.6 : Poids et dimensions d'un moteur
Paramètre
|
Notation
|
Valeur en SI
|
Valeur en
Impérial
|
Masse du moteur à sec
|
|
1 495
|
kg
|
3 297
|
lb
|
Longueur du moteur
|
|
2,812
|
m
|
9,224
|
ft
|
Diamètre du moteur
|
|
1,715
|
m
|
5,626
|
ft
|
|
3.4. Caractéristiques et positionnement des
surfaces verticales
La surface verticale n'étant pas censée
générer de la portance en vol rectiligne (suivant l'axe
longitudinal de l'avion) le profil d'aile symétrique NACA 0012 sera
utilisé, car comme il ne produit aucune portance à incidence
nulle, l'empennage ne créera pas de mouvements de lacet en vol
rectiligne. Le tableau 3.7 présente les paramètres
d'entrées pour le design de la surface verticale.
78
Tableau 3.7 : Données du design
Paramètre
|
Notation
|
Valeur
|
Unité
|
Coefficient VT
|
|
0,0242
|
-
|
Envergure de l'aile principale
|
|
34,4
|
m
|
Surface alaire
|
|
173,9
|
m2
|
Longueur du bras de levier VT
|
|
9,0
|
m
|
Allongement VT
|
|
1,8
|
-
|
Effilement VT
|
|
0,5
|
-
|
|
Le tableau 3.8 présente une synthèse des
résultats du design de l'empennage vertical. Compte tenu de la valeur
relativement élevée de la surface totale d'empennage, la solution
a été d'opter pour un double empennage vertical, comme sur les
BWB X-48B et X-48C de Boeing, le A0.30 des Allemands, ou encore le MEVERIC de
Airbus.
Tableau 3.8 : Résultats du design de la surface
verticale
Paramètre
|
Notation
|
Valeur en SI
|
Valeur en
Impérial
|
Surface totale VT
|
|
16,080
|
m2
|
173,03
|
ft2
|
Nombre de surfaces verticales
|
|
2
|
-
|
2
|
-
|
Envergure VT
|
|
2,689
|
m
|
8,82
|
ft
|
Corde à la racine VT
|
|
3,845
|
m
|
12,61
|
ft
|
Corde à l'extrémité VT
|
|
1,921
|
m
|
6,30
|
ft
|
Corde moyenne aérodynamique VT
|
|
2,989
|
m
|
9,804
|
ft
|
Angle de flèche au bord d'attaque
|
|
35,5
|
deg
|
35,5
|
deg
|
|
79
À partir des caractéristiques
géométriques des moteurs et des surfaces verticales ci-dessus
présentées, les figures 3.3 et 3.4 illustrent la configuration du
BWB avec ses moteurs placés à l'arrière du fuselage, tel
que c'est le cas pour les BWB expérimentaux X-B48 et X-C48 de Boeing ou
encore le MEVERIC de Airbus. Le dessin de l'avion a été
réalisé à l'aile du logiciel CATIA V5 en partant de la
géométrie initiale réalisée par Velazquez (2020).
L'annexe 3 présente les positions des points ainsi que les profils
d'ailes nécessaires à la modélisation 3D du fuselage et de
l'aile de l'avion.
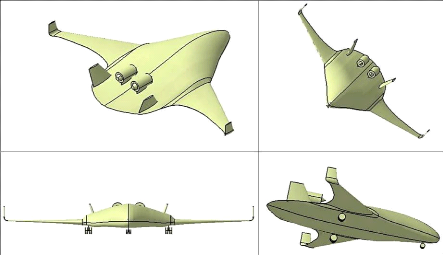
Figure 3.3 : Vue multiple du BWB, moteurs en arrière du
fuselage
80
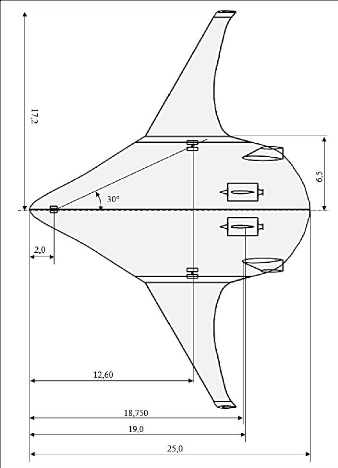
Figure 3.4 : Vue de dessus du BWB, moteurs et surfaces
verticales placés
3.5. Type et dimensions du train d'atterrissage
La configuration du train d'atterrissage retenue pour le BWB
est de type tricycle rétractable, comme pour le CRJ1000. Le train
principal (à l'arrière) sera constitué de quatre roues
tandis que le train avant possèdera deux. Le tableau 3.9 présente
les dimensions (largeur et diamètre en pouce), des roues constituant le
train d'atterrissage.
81
Tableau 3.9 : Dimensions des roues du train d'atterrissage
Type de roue
|
Nombre
|
Diamètre (in)
|
Largeur (in)
|
Roues du train principal
|
4
|
37,35
|
12,33
|
Roues de nez
|
2
|
24,28
|
8,02
|
|
3.6. Performances au décollage et à
l'atterrissage
Les aéroports les plus hauts du monde sont à
une altitude d'environ 4000 mètres. Ainsi, Il serait judicieux d'estimer
les distances de décollage et d'atterrissage du BWB au niveau de la mer
d'une part, et à 4500 mètres d'altitude d'autre part. Le tableau
3.10 présente les données nécessaires à
l'évaluation des distances de décollage et d'atterrissage de
l'avion.
Tableau 3.10 : Données de calcul des distances de
décollage et d'atterrissage
Désignation
|
Notation
|
Valeur
|
Unité
|
Longueur de piste
|
BFL
|
2 000
|
m
|
Altitude maximale de l'aéroport
|
-
|
4 500
|
m
|
Masse maximale au décollage
|
MTOW
|
41 895
|
kg
|
Masse maximale à l'atterrissage
|
MLW
|
36 273
|
kg
|
Coefficient de friction au roulage
|
Décollage (aucun freinage)
|
|
0,05
|
-
|
|
|
0,50
|
-
|
Inversion de poussée à l'atterrissage (40% de la
poussée maximale) SL
|
|
- 67,20
|
kN
|
|
Le tableau 3.11 présente les performances de
décollage et d'atterrissage du BWB au niveau de la mer d'une part, et
à un aéroport situé à 4500 mètres d'altitude
d'autre part.
82
Tableau 3.11 : Distances de décollage et d'atterrissage
du BWB
Décollage
|
Atterrissage
|
|
0
|
|
|
0
|
|
Altitude à l'aéroport [m]
|
|
4500
|
Altitude à l'aéroport [m]
|
|
4500
|
|
(SL)
|
|
|
(SL)
|
|
Angle de montée [deg]
|
4°
|
4°
|
Angle d'approche [deg]
|
-2°
|
-3°
|
Roulage au sol [m]
|
|
628,6
|
864,2
|
Approche [m]
|
|
388,2
|
176,7
|
Rotation [m]
|
|
171,6
|
171.6
|
Transition [m]
|
|
96,6
|
228,5
|
Transition [m]
|
|
133,8
|
133,8
|
Roue libre [m]
|
|
202,4
|
254,1
|
Montée [m]
|
|
85,8
|
85,8
|
Freinage [m]
|
|
347,4
|
612,3
|
Distance totale de
|
|
|
|
Distance totale
|
|
|
|
décollage [m]
|
|
1 020
|
1 256
|
d'atterrissage [m]
|
|
1 725
|
2 120
|
|
Au regard des valeurs de distances de décollage et
d'atterrissage présentées dans le tableau 3.11 ci-haut, il en
ressort que le BWB serait capable de décoller dans n'importe quel
aéroport sur une distance de moins de 1260 mètres, bien en
dessous de la limite maximale de 2000 mètres imposée dans les
requis du design. Par ailleurs, sa configuration actuelle ne lui permettrait
pas de se poser sécuritairement dans les aéroports à haute
altitude avec une longueur de piste de 2000 mètres, car il lui en faudra
120 mètres de plus. Cependant, comme les aéroports situés
à des altitudes élevées disposent de pistes plus longues
le BWB pourra être opérationnel dans ces aéroports.
Pour finir, en comparaison avec les avions de taille
assimilée tels que le CRJ1000 de Bombardier avec une distance de
décollage de 2120 mètres, ou encore le Antonov An-158 avec une
distance de décollage de 1900 mètres, il s'avère que le
BWB présente un excellent avantage de performances au
décollage.
Pour ce qui est de l'atterrissage, la distance minimale de
piste pour que le BWB puisse se poser au niveau de la mer serait de 1725
mètres. En comparaison avec le CRJ1000 de Bombardier avec une distance
d'atterrissage de 1750 mètres, il en ressort que les deux avions ont des
performances quasi similaires à l'atterrissage.
83
3.7. Performances en montée et en descente
Pendant la montée ou pendant la descente, les
paramètres les plus importants sont : le taux de montée
(respectivement de descente), la vitesse et l'angle de montée
(respectivement de descente).
3.7.1. Performances pendant la montée du BWB
L'équation (2.90) donne l'expression du taux de
montée en fonction de la vitesse rectiligne de l'avion et de l'angle de
montée. La figure 3.5 présente la variation du taux de
montée suivant la vitesse de montée et l'angle de
montée.
Au regard de cette figure, il en ressort que l'angle de
montée de l'avion n'a quasiment aucune influence sur le taux de
montée. Par contre, le taux de montée est fortement
dépendant de la vitesse de montée de l'avion. Lorsque l'avion
atteint la vitesse de 485 ft/s (147,8 m/s), le taux de montée est
maximal. En dessous de cette valeur, le taux de montée croît avec
la vitesse de l'avion et, au-dessus, le taux de montée décroit
avec la vitesse de l'avion.
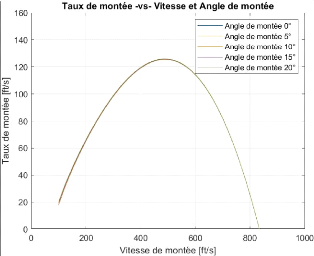
Figure 3.5 : Courbe de variation du taux de montée du
BWB
84
3.7.2. Performances pendant la descente
L'équation (2.94) donne l'expression du taux de
descente à poussée nulle du BWB, en fonction de la vitesse
rectiligne et de l'angle de descente. La figure 3.6 présente la
variation du taux de descente suivant la vitesse de descente et l'angle de
descente.
Au regard de cette figure, il en ressort que l'angle de
descente du BWB a peu d'influence sur son taux de descente. Par contre, ce taux
de descente est fortement dépendant de la vitesse de descente de
l'avion. Pour une vitesse de descente de 400 ft/s (122 m/s), le taux de
descente est minimal. En dessous de cette valeur, le taux de descente
décroît avec la vitesse de l'avion et, au-dessus, le taux de
descente croît avec la vitesse de l'avion.
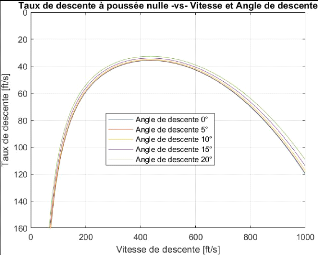
Figure 3.6 : Courbe de variation du taux de descente du BWB
(moteurs éteints)
n min,sup = + 2,33
3.8. Facteur de charge et domaine de vol du BWB
Le poids maximal de l'avion étant de 92362 lb,
d'après les recommandations du RAC, le
facteur de charge minimal positif de l'avion devrait être
de et son maximum ne
devrait pas dépasser 3,8. Ainsi, le facteur de charge
limite supérieur du BWB sera pris à
85
. Pour le facteur de charge minimal négatif, la
règlementation recommande qu'il
soit fixé à 40% de la limite supérieure,
soit : . Ainsi, le facteur de charge limite
inférieure du BWB sera
pris à .
Les équations (2.97) et (2.98) donnent l'expression du
facteur de charge de l'avion en fonction de la vitesse de vol. A partir de ces
équations, le diagramme V-n du BWB a été construit tel
qu'illustré à la figure 3.7.
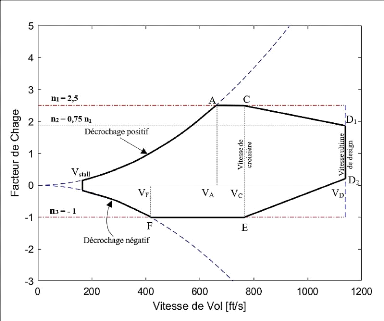
Diagramme V-n à Hcr = 13,9 km
Figure 3.7 : Diagramme V-n du BWB, à altitude de
croisière
Sur ce diagramme, les courbes OA et OF correspondent à
l'état de décrochage de l'avion et sont obtenues à partir
de la relation aérodynamique donnée par l'équation
(2.98).
Pour des vitesses inférieures à VA (incidence
positive de l'aile) et VF (incidence négative), les charges maximales
pouvant être appliquées à l'avion sont régies par
CLmax. AC et FE représentent les facteurs de charge opérationnels
maximaux pour l'avion. Lorsque la vitesse de l'avion est supérieure
à la vitesse de croisière de calcul VC, les lignes de coupure CD1
et
86
D2E soulagent les cas de calcul à couvrir, car il
n'est pas attendu que les charges limites soient appliquées à la
vitesse maximale (Megson, 2016).
La limite D1D2 est atteinte à la vitesse de vol la
plus élevée, qui est la vitesse de « plongée ».
VD = 1,5 Vcruise est donc la vitesse ultime de design à ne jamais
dépasser (Corke,2003).
3.9. Synthèse des spécifications
générales du BWB
Maintenant que les principales caractéristiques
géométriques et de performances de l'avion ont été
déterminées, le tableau 3.12 ci-après présente une
synthèse des spécifications finales de l'appareil. Comme
présenté dans le ce tableau, le moteur sélectionné
pour la propulsion de l'avion est le GE Passport 20-19BB1A. Il s'agit d'un
moteur de type turbosoufflante qui fait partir de la famille des moteurs
à réaction commerciaux « Passport » du constructeur
General Electric. Réputé pour sa fiable et son économie en
carburant, ce moteur équipe la nouvelle famille d'avions d'affaires
Global 7500 de Bombardier. Par ailleurs, le moteur BR715-A1-30 de Rolls-Royce
qui équipe actuellement le jet régional Boeing 717-200
(poussée maximale au niveau de la mer : 18710 lbf / 84,2 kN) pourrait
également être utilisé pour propulser le BWB.
Tableau 3.12 : Synthèse des caractéristiques
générales du BWB
Caractéristiques commerciales
|
Motorisation
|
Catégorie Équipage Équipage Cabine
Passagers max
|
Avion de ligne
régional
2
3
100
|
Type
Références
Poussée unitaire (SL, ISA)
Nombre de moteurs Poussée totale
|
Turbosoufflante
GE Passport 20-
19BB1A
18920 lbf
(84,16
kN)
2
37840 lbf
(168,32 kN)
|
Caractéristiques
géométriques
|
|
25 m
34,4 m
5,4 m
316 m2
|
Performances
|
|
Mach 0,78 (828
km/h)
Mach 0,82 (871
km/h)
0,397
|
|
87
Masse et capacité d'emport
|
Performances
|
|
2 500 km
45 min
13 900 m
1020 m
1 725 m
38,4 m/s ou 2304
m/min
10,0 m/s ou 602
m/min
|
OEW
MEW
Charge utile payante MTOW
Carburant
Facteur de
structure à OEW
|
20 923 kg
20 288 kg
12 053 kg
41 895 kg
8 920 kg
0,50
|
|
Parvenu au terme de ce chapitre dont l'objectif était
de présenter et discuter les résultats de l'estimation de la
masse du BWB et d'évaluer ses performances, il en ressort que l'avion
aura une masse totale au décollage d'environ 41895 kg, donc 20,2% de
moins que la masse prédite par Delacroix (2017) et 6,3% de moins que
celle prédite par Velazquez (2020). Par ailleurs, le facteur de
structure opérationnel de l'avion estimé à 0,50 signifie
que le BWB aura une capacité d'emport relative plus importante que celle
des avions de taille comparable à l'instar du CRJ1000 de bombardier
(fsOEW = 0,557), du ARJ21-900 (fsOEW = 0,567), ou encore de l'Antonov An-148
(fsOEW = 0,503). Placés à l'arrière du fuselage avec les
surfaces verticales, les moteurs du BWB généreront une
poussée maximale de 168 kN. Le chapitre qui suit sera
réservé au centrage des masses du BWB ainsi qu'à l'analyse
de sa stabilité statique, afin de se rassurer que dans la configuration
actuelle, l'avion est statiquement stable d'une part, et que le niveau de
stabilité est acceptable d'autre part.
88
CHAPITRE 4
CENTRAGE ET STABILITÉ DU BWB
Pendant les phases de conception, de fabrication et
d'opération d'un avion, le centrage des masses fait l'objet d'une
attention particulière, afin de garantir la stabilité de
l'appareil. Ce chapitre présente en première section le centrage
des masses du BWB et la détermination de son centre de gravité.
La seconde section quant à elle est réservée à la
détermination du point neutre de l'avion d'une part, et à
l'analyse de sa stabilité statique d'autre part.
4.1. Centrage des masses du BWB
La position du centre de gravité est une
considération déterminante pour assurer la stabilité de
l'avion, pendant toute l'enveloppe de vol. Après avoir obtenu les masses
des composants (c'est-à-dire la masse détaillée)
présentées à la section 3.1, il devient possible de
localiser le centre de gravité de l'avion.
4.1.1. Méthodologie de détermination du
centre de masse de l'avion
Statistiquement, l'estimation de la position du centre de
gravité de l'avion au complet équivaut à déterminer
le barycentre de l'ensemble des centres de gravité des groupes de
composants constituant l'appareil, pondéré de leur masse
respective. Le centre de gravité de chacun de ces groupes de composants
est défini sur la base des données historiques disponibles et du
retour d'expérience de l'équipe de design.
Analytiquement, le centre de gravité dans la direction
longitudinale d'un avion se détermine comme suit :
n n
X m X m
cg = ? ?
i i i
i = 1 i=1
Xcg
X i
mi
(4.1)
Où :
est la position du centre de gravité de l'avion par
rapport au nez.
est la position du centre de gravité du groupe de
composant i considéré. est la masse du groupe de
composant i considéré.
90
Cependant, en opération, la masse de carburant et la
charge utile d'un avion sont des quantités variables. Ceci a pour
conséquence de modifier la position de centre de gravité en tout
temps. Ainsi, chaque combinaison de carburant et de charge utile donne une
position du centre de gravité. Pour cette raison, le calcul du centre de
gravité de l'avion se fait suivant trois considérations à
savoir : à masse maximale au décollage (MTOW), à masse
à vide opérationnelle (OEW) et à masse maximale sans
carburant (MZFW). Ainsi, l'équation (4.2) donne la position du centre de
gravité par rapport au nez de l'avion avec MTOW.
r r
mzfw mzfw mzfw
= ? ? m mzfw
X m X
cg i i i
i = 1 i =
1
(4.2)
De même, la position du centre de gravité par
rapport au nez de l'avion avec OEW est donnée par l'équation
(4.3).
(4.3)
Et, la position du centre de gravité par rapport au
nez de l'avion avec MZFW est donnée par l'équation (4.4).
Les résultats obtenus des équations (4.2)
à (4.4) ci-dessus donnent la plage de localisation du centre de
gravité de l'avion. Dans cette plage, la valeur minimale
représentera le centre de gravité maximum avant tandis que la
valeur maximale représentera le centre de gravité maximum
arrière.
4.1.2. Détermination du centre de gravité du
BWB
Comme dit plus haut, le centre de gravité du BWB est
le barycentre des centres de gravité de toutes les composantes de
l'avion. Pour les éléments en forme d'aile tels que l'aile
extérieure, le fuselage et les surfaces verticales, Raymer (2006)
suggère que leur centre de gravité se situerait à 40% de
la corde moyenne tandis que Kundu (2019) l'estime à 30%. Ainsi, en
considérant la moyenne des prescriptions de Raymer et de Kundu, les
centre de gravité des corps en aile dans ce travail sera pris à
35% de leurs cordes moyennes respectives.
91
Par ailleurs Raymer (2006) et Kundu (2019) préconisent
tous deux de prendre le centre de gravité du moteur à 50% de sa
longueur. Les éléments de la charge utile doivent être
repartis autour du centre de gravité de l'avion. Pour ce qui est des
éléments du sous-groupe « équipements et instruments
», ceux-ci seront positionnés de telle manière que leurs
centres de gravité se retrouvent entre 30 et 50% de la longueur totale
de l'avion.
Le tableau 4.1 présente la localisation longitudinale
des centres de gravité des éléments constituant
l'avion.
92
Tableau 4.1 : Localisation du centre de gravité du BWB
(moteurs à l'arrière du fuselage)
GROUPE
|
DÉTAIL
DES
ÉLÉMENTS
|
MASSE
[kg]
|
CG Xi
[m]
|
Position du
CG
|
ÉLÉMENTS
|
Structure de la Cellule
|
STRUCTURAUX
|
Aile
|
2754
|
14,8
|
35%
|
|
Empennage VT
|
606
|
20,7
|
35%
|
|
Fuselage (cellule centrale)
|
4546
|
10,9
|
35%
|
|
Train d'atterrissage AV
|
244
|
2,0
|
5-10%
|
|
Train d'atterrissage AR
|
1384
|
12,6
|
Donnée par
Howe (2000)
|
|
Groupe de Propulsion
|
5859
|
19,0
|
|
|
Équipement & Instruments
|
|
Air Conditionné
|
767
|
7,5
|
30-50%
|
|
Avioniques
|
560
|
2,5
|
10-40%
|
|
Systèmes Hydrauliques
|
85
|
10,0
|
40-50%
|
|
Systèmes Électriques
|
291
|
7,5
|
30-50%
|
|
Dégivreur
|
97
|
7,5
|
30-50%
|
|
Instruments
|
136
|
7,5
|
30-50%
|
|
Équipements de manutention
|
15
|
7,5
|
30-50%
|
|
APU
|
11
|
7,5
|
30-50%
|
|
Ensemble Fournitures
|
2933
|
7,5
|
30-50%
|
|
(sièges, mobilier, etc.)
|
|
|
|
CHARGE UTILE
|
Passagers, y compris les bagages à main
|
8165
|
9,3
|
80-100%
|
|
Conteneurs LD-3 (qté 2)
|
2688
|
9,3
|
80-100%
|
|
Eau, nourriture,
équipements de sécurité...
|
1200
|
5,0
|
20-40%
|
ÉLÉMENTS
|
Équipage
|
425
|
2,5
|
10%
|
OPÉRATIONNELS
|
Masse de pénalité
|
209
|
5,0
|
20-30%
|
CARBURANT
|
Carburant Aile
|
4480
|
15,0
|
40%
|
|
Carburant CB
|
4480
|
5,8
|
50-100%
|
MASSES DE
|
MTOW
|
41895
|
11,18
|
|
L'AVION
|
OEW
|
20923
|
12,82
|
|
|
MZFW
|
32975
|
11,38
|
|
|
De la position maximale avant (à MTOW) à la
position maximale arrière (à OEW), le centre de gravité de
l'avion se déplace d'environ 1,64 mètre. Nous verrons dans les
sections qui
93
Au regard du tableau 4.1 précédent, il en ressort
que :
· À charge maximale (MTOW), le centre de
gravité du BWB est le plus en avant et se situerait à 11,18
mètres du nez de l'appareil, soit à 45% de la longueur total ;
· À masse à vide opérationnelle
(OEW), le centre de gravité du BWB est le plus en arrière et se
situerait à 12,82 mètres du nez de l'appareil, soit à
51,3% de la longueur totale ;
· À masse maximale sans carburant (MZFW), le
centre de gravité du BWB se situerait à 11,38 mètres du
nez de l'appareil, soit à 45,5% de la longueur total.
La position de chacun de ces centres de gravité sur
l'avion est illustrée dans la section suivante. 4.1.3.
Positionnement du centre de gravité sur l'avion
Comme présenté dans la section
précédente, la position du centre de gravité du BWB varie
en fonction de la masse de l'appareil. La figure ci-après illustre la
localisation longitudinale du centre de gravité de l'avion, selon la
masse totale considérée.
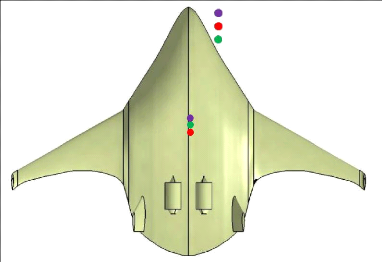
Centre de gravité à MTOW (11,18 m) Centre de
gravité à OEW (12,82 m) Centre de gravité à MZFW
(11,38 m)
Figure 4.1 : Positionnement du centre de gravité du
BWB
94
suivent que cette variation de la position du centre de
gravité de l'avion a un impact significatif sur la stabilité de
l'appareil.
4.2. Point neutre et stabilité statique du BWB
Encore appelé foyer, le point neutre est le point par
rapport auquel le moment des forces de portance (aile extérieure et
corps central dans le cas du BWB) reste constant, quel que soit l'angle
d'attaque. Pour un avion, la position du point neutre par rapport au centre de
gravité influe directement sur la stabilité.
Dans toute cette section, les hypothèses suivantes seront
considérées :
- L'avion vole en palier, les forces de trainée () et de
poussée () sont égales ; - Les forces de trainée () et de
poussée () ne créent pas de moment ;
- Les forces de portance du corps centrale ( ) et de l'aile ( )
sont verticales.
4.2.1. Détermination du point neutre du BWB
Comme dit plus haut, au point neutre, le moment des forces de
portance reste constant quel que soit l'angle d'incidence de l'avion. La
détermination de sa localisation est un préalable à
l'étude de la stabilité statique de l'appareil.
4.2.1.1. Modélisation simplifiée de
l'équilibre du BWB
La figure 4.2 présente une modélisation
simplifiée du BWB, ainsi que les forces extérieures qui s'y
exercent en vol en palier.
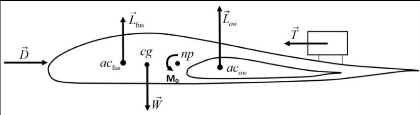
Figure 4.2 : Modèle simplifié du bilan des forces
appliquées à un BWB
95
Sur cette figure, D représente le bilan des forces de
trainée, T est la force de poussée totale des
moteurs, W est le poids total de l'avion appliqué au
centre de gravité, est la résultante des
forces de portance
générées par le fuselage (appliquée au centre
aérodynamique du profil
d'aile) et est la résultante des forces de portance
générées par l'aile extérieure
(appliquée
au centre aérodynamique du profil d'aile
également).
À l'équilibre, le bilan des forces donne :
? M np ( L fus ) M
np ( L ow ) 0
+ ? =
? ?
Au point neutre, la somme des moments des forces
aérodynamiques est constante, quel que soit l'angle d'attaque. Ceci se
traduit analytiquement par l'équation suivante :
? ? L X np X ac L
ow X ac X np
? ( - ) ( )
- - ? = 0
? fus
?? ?
(4.6)
(4.7)
Sachant que les forces aérodynamiques s'appliquant
à l'avion ont pour résultante les forces de portance
générées par le fuselage et l'aile extérieure,
l'équation (4.7) implique :
2 L OW = ? S OW V C L
OW
L = ? S V C L
fus fus ,fus ,
2 2
S
S C S C
fus L , ow
C L ,fus
= C ow =
Sa
L a L a
Sa Sa
1 1
fus
ow
(4.9)
2
Sachant que : et
Puis en posant : et
L'équation (4.9) permet de déduire la position du
point neutre de l'avion :
96
(4.10)
Où :
est l'abscisse du point neutre par rapport au repère
avion.
est l'abscisse du centre aérodynamique du corps central
par rapport au repère avion.
est l'abscisse du centre aérodynamique de l'aile par
rapport au repère avion.
est le coefficient de portance du corps central.
est le coefficient de portance de l'aile extérieure.
est la surface plan du corps central.
est la surface plan de l'aile extérieure.
Il ne reste plus qu'à déterminer chacun des
paramètres de l'équation (4.10) pour trouver la position du point
neutre.
4.2.1.2. Localisation des centres aérodynamiques
et
La figure 4.3 présente la position des centres
aérodynamiques du corps centrale et de l'aile extérieure, sur la
géométrie de l'avion.
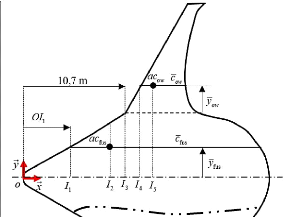
Figure 4.3 : Localisation des centres aérodynamiques du
corps central et de l'aile
97
1
(4.16)
La corde moyenne aérodynamique d'une aile
trapézoïdale est donnée par la relation
suivante (Corke, 2003) :
(4.11)
Où : et sont respectivement la corde à la racine et
l'effilement de l'aile.
La distance entre la corde moyenne aérodynamique de l'aile
et la corde à la racine est
donnée par la relation suivante (Corke, 2003) :
(4.12)
Où : est l'envergure de l'aile.
Par simplification, le centre aérodynamique d'une aile
est généralement pris au quart de sa corde aérodynamique
moyenne . Au regard de la géométrie de l'avion
présentée à la figure 4.3, la localisation des centres
aérodynamiques du corps central et de l'aile extérieure est
donnée par les relations géométriques suivantes :
X
fus =y ac fus tan ? LE
+c
,fus fus
(4.13)
(4.14)
En fonction des paramètres géométriques
des ailes complètes, les équations (4.13) et (4.14) deviennent
:
X ow = OI + y ow ?
LE ow + c ow
tan
ac 3 , 4
1
4
(4.15)
dCL
(4.18)
98
Où :
et sont respectivement les cordes moyennes aérodynamiques
du corps central et de
l'aile extérieure.
et sont respectivement les distances entre la corde à la
racine et la corde moyenne
aérodynamique, du corps central et de l'aile
extérieure.
et sont respectivement les angles de flèche au bord
d'attache du corps central et
de l'aile extérieure.
4.2.1.3. Détermination des coefficients de portance
du corps central et de l'aile
Le corps central est caractérisé par un profil
aérodynamique LA2573A. Comme énoncé dans les
hypothèses, nous assumerons que celui-ci s'étend
symétriquement des extrémités y = 0 m à y = 6,5 m
(c'est-à-dire jusqu'à la racine de l'aile extérieure).
L'aile extérieure quant à elle est caractérisée par
un profil aérodynamique SC(2)-0712 à ses extrémités
(y = 6,5 m et y = 17,2 m). Les coordonnées des points constituant les
profils du corps central et de l'aile extérieure sont
présentées dans l'annexe 3.
L'équation de la droite de portance d'une aile
tridimensionnelle (c'est-à-dire complète) est donnée par
la relation suivante (Anderson, 1999) :
(4.17)
Où :
est l'angle d'incidence du flux d'air avec le bord d'attaque de
l'aile (angle d'attaque) ; est l'angle d'attaque à portance nulle (c'est
le même en 2D qu'en 3D).
La théorie de la ligne de portance de Prandtl permet
d'estimer la pente de portance d'une
aile complète (Anderson, 1999). En vol subsonique
compressible, la pente de portance
pour une aile en flèche s'exprime comme suit (Anderson,
1999) :
CLa
= =
a A
0 cos 0.5
da 2
2
1 - M cos 2 A
+ ? A
( ) ( ) ? + ( ) ( )
0.5 ? a cos ?
AR
0 0.5 ? a cos A ?
AR
? 0 0.5
99
Où :
[rad-1] est la pente de portance du profil
d'aile.
est le nombre de Mach en vol subsonique.
L'angle de flèche à la moitié de la corde
est donné par l'équation qui suit :
(4.19)
4.2.1.4. Résultats de calcul du point neutre et de
la droite de portance du BWB
En se basant sur la démarche et les équations
présentées dans les sections précédentes, le
tableau 4.2 présente les données nécessaires au calcul de
la localisation du point neutre de l'avion.
Tableau 4.2 : Données de paramètres
géométriques de l'avion
|
Paramètre
|
Notation
|
Valeur
|
Unité
|
|
|
14,5
|
m
|
|
Envergure
|
|
|
|
|
|
19,9
|
m
|
|
|
0,30
|
-
|
|
Effilement
|
|
|
|
|
|
0,20
|
-
|
|
|
240
|
m2
|
|
Surface plan
|
|
|
|
|
|
76
|
m2
|
|
|
25
|
m
|
|
Corde à la racine
|
|
|
|
|
|
7,6
|
m
|
|
Angle de flèche au
|
|
57,5
|
deg
|
|
bord d'attaque
|
|
30
|
deg
|
100
À partir de ces données, les positions des
centres aérodynamiques du corps central et de l'aile extérieure
ont pu être déterminées. Le tableau 4.3 présente les
différents résultats obtenus pour le calcul de ces centres
aérodynamiques.
Tableau 4.3 : Localisation des centres
aérodynamiques
du corps central et de l'aile extérieure
|
Paramètre
|
Notation
|
Valeur [m]
|
Équation
|
|
Corde moyenne
|
|
17,85
|
|
|
|
|
E-4.11
|
|
aérodynamique
|
|
5,24
|
|
|
Position de la corde
|
|
2,98
|
|
|
moyenne par rapport à
|
|
|
E-4.12
|
|
la corde racine
|
|
3,87
|
|
|
Position des centres
|
|
14,24
|
E-4.15
|
|
aérodynamiques
|
|
9,14
|
E-4.16
|
Il en ressort au vu de ces valeurs que les centres
aérodynamiques du corps central et de l'aile extérieure sont
distants d'environ 5,1 mètres.
Par la suite, après avoir déterminé les
équations des droites de portance du corps central et de l'aile
extérieure, la position du point neutre du BWB peut être
calculée. Le tableau 4.4 présente les différents
résultats ayant permis à leurs déterminations.
101
Tableau 4.4 : Droites de portance et point neutre du BWB
|
Paramètre
|
Notation
|
Valeur/Expression
|
Unité
|
Référence
|
|
Angle de flèche au 1/2 de la corde moyenne
|
|
20,29
15,21
|
deg
deg
|
E-4.19
|
|
Allongement
|
|
0,876
5,211
|
-
-
|
(Corke,
2003)
|
|
Angle d'attaque à portance nulle
|
|
- 0,75
- 4,50
|
deg
deg
|
Profil
LA2573A
Profil
SC(2)-0712
|
|
Pente de portance du profil d'aile 2D
|
|
6,251
6,889
|
rad-1
rad-1
|
Profil
LA2573A
Profil
SC(2)-0712
|
|
Pente de portance de l'aile 3D
|
|
0,03639
0,10899
|
deg-1
deg-1
|
E-4.18
|
|
Droite de portance (en degré)
|
|
|
-
-
-
|
E-4.17
E-2.115
|
|
Point neutre
|
|
|
m
|
E-4.10
|
Ainsi, le point neutre du BWB se situerait à environ
11,624 mètres du nez, soit à 46,5% de la longueur totale de
l'avion.
Par ailleurs, la figure 4.4 présente la droite de
portance du BWB en fonction de l'angle d'attaque.
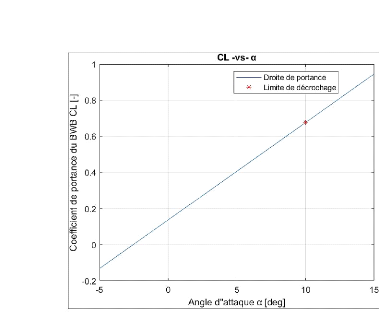
102
Figure 4.4 : Droite de portance du BWB
D'après les estimations de Velazquez (2020), la limite
de décrochage de l'avion se situerait à un angle d'attaque de
10°.
Du fait que cette droite de portance a été
obtenue à partir des relations analytiques de la théorie des
lignes de portance de Prandtl, une validation a été
effectuée par comparaison avec la droite de portance obtenue par
Velazquez (2020) à l'aide de la simulation numérique.
La figure 4.5 présente à gauche, la
superposition de la droite de portance du BWB obtenue analytiquement à
partir de la théorie de la ligne portante de Prandtl avec celle obtenue
par Velazquez avec une analyse CFD. À la droite de la même figure
est présentée la courbe de l'erreur relative absolue entre les
coefficients de portance obtenue de l'analyse CFD de Velazquez et ceux obtenus
du modèle analytique développé dans ce travail.
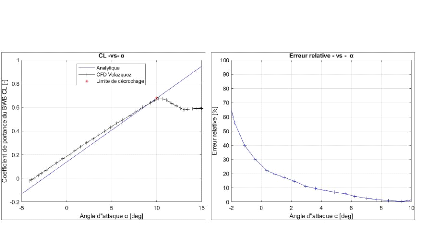
103
Figure 4.5 : Comparaison entre les droites de portance analytique
et CFD du BWB
Au regard de la figure 4.5, il apparait que la droite de
portance du modèle analytique développé dans ce travail
est très proche de celle obtenue par Velazquez à l'aide d'une
simulation CFD. Cette affirmation est confirmée par la
décroissance exponentielle de l'erreur relative entre les deux
approches. À partir d'un angle d'attaque de 1°, l'erreur relative
est de moins de 20% et décroit jusqu'à 2% après 8,5°.
À la limite de décrochage de 10°, le coefficient de portance
maximale prédit par le modèle analytique est de 0,677
contre 0,673 prédit par Velazquez avec la CFD, soit une
erreur relative d'environ 0,6%, ce qui semble assez faible.
À l'issue de cette analyse comparative entre le
modèle analytique développé dans ce travail et
l'estimation CFD faite par Velazquez, il en ressort que le modèle
analytique est acceptable.
4.2.2. Analyse de la stabilité statique du BWB
Dans cette section, la stabilité statique longitudinale
de l'avion sera étudiée, au regard de la marge statique d'une
part et du coefficient de moment de tangage d'autre part.
4.2.2.1. Marge statique et stabilité du BWB
L'équation (2.103) donne l'expression de la marge
statique de l'avion, en fonction de la position du centre de gravité et
du point neutre. Pour une position de centre de gravité donnée,
l'avion sera considéré longitudinalement stable si et seulement
si sa marge statique est positive. Le tableau ci-après récapitule
les valeurs de marges statiques obtenues, en considérant les trois
positions de référence du centre de gravité de l'avion.
104
Tableau 4.5 : Marge statique du BWB (moteurs à
l'arrière du fuselage)
Cm 0,2D,fus
|
Masse de
l'avion
|
Centre Xcg [m]
|
de gravité Limite
|
Marge statique Kn [%]
|
État de
stabilité
|
|
MTOW
|
11,18
|
Cg max. AV
|
2,59
|
Stable
|
|
OEW
|
12,82
|
Cg max. AR
|
- 7,11
|
Instable
|
|
MZFW
|
11,38
|
Cg nominal
|
1,44
|
Stable
|
Au regard des valeurs de marges statiques
présentées dans le tableau ci-dessus, il apparait qu'à
vide, le BWB est longitudinalement instable. En effet, le centre de
gravité de l'avion à vide se trouve derrière le point
neutre par conséquent, ce dernier aura tendance à cabrer du nez,
rendant ainsi tout pilotage difficile, voire impossible, sans l'assistance d'un
système de commande de vol automatique.
Par ailleurs, à la charge maximale au décollage
comme à la charge maximale sans carburant, la marge statique de l'avion
est certes positive, mais reste bien inférieure au minimum de 5%
recommandé par la FAA. Par conséquent, l'avion présentera
des difficultés de pilotage.
Cm 0,2D,OW
Cm 0,3D,fus
Cm 0,3D,ow
4.2.2.2. Moment de tangage et stabilité du BWB
À la section 2.7.3 précédente, le
coefficient de moment du BWB a été exprimé à partir
des coefficients de moment du corps central et de l'aile. Le tableau 4.6
présente les différents résultats ayant permis à la
détermination du coefficient de moment de l'avion.
Tableau 4.6 : Coefficient de moment du BWB (moteurs à
l'arrière du fuselage)
|
Paramètre
|
Notation
|
Valeur/Expression
|
Référence
|
|
Coefficient de moment à portance nulle du profil d'aile
|
C m 0 ,
cg
|
0,0177
- 0,1162
|
Profil
LA2573A
Profil
SC(2)-0712
|
|
Coefficient de moment à portance nulle de l'aile 3D
|
|
0,00298
- 0,08503
|
E-2.112
|
|
Coefficient de moment à portance nulle du BWB
|
|
0,00873
|
E-2.110
|
105
|
Marge statique [%]
|
|
2,59
- 7,11
1,44
|
Max. AV
Max. AR
Nominale
|
|
Droite de portance du BWB
|
|
|
E-2.115
|
|
Coefficient de moment du BWB
|
|
|
E-2.101
|
Ainsi, pour les trois positions du centre de gravité de
l'avion, le coefficient de moment varie linéairement avec l'angle
d'attaque. La figure 4.6 présente la droite de variation du coefficient
de moment du BWB en croisière, en fonction de l'angle d'attaque.
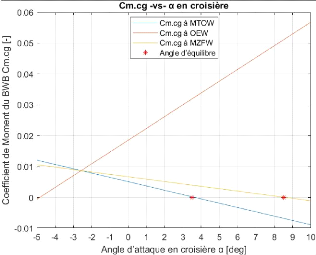
Figure 4.6 : Variation du coefficient de moment du BWB (moteurs
à l'arrière du fuselage)
Au regard de la figure 4.6, les droites de variation du
coefficient de moment de l'avion viennent confirmer l'analyse de
stabilité effectuée précédemment à partir
des valeurs de marges statiques. En effet, la pente de la droite de coefficient
de moment lorsque l'avion est à vide (OEW) est positive ; ce qui
signifie que dans cette situation, le BWB est instable. Par ailleurs,
Le tableau 4.7 présente les positions des centres de
gravité des composants de l'avion, suite au déplacement des
moteurs sous l'aile de l'appareil.
106
lorsque l'avion est à masse maximale au
décollage (MTOW) ou à masse maximale sans carburant (MZFW), les
pentes de leurs droites de coefficient de moment sont négatives, ce qui
confirme la stabilité de l'appareil dans ces situations. Le point
d'équilibre de l'avion est atteint pour les valeurs d'angle d'attaque de
3,5° et 8,5° lorsque l'avion est à MTOW et MZFW
respectivement. Cependant, la valeur d'angle d'équilibre de 8,5°
est assez élevée pour un avion de transport civil; par
conséquent, le BWB en l'état actuel présente des
défauts de stabilité et donc, il ne satisfait pas aux exigences
de la réglementation en matière de transport des passagers.
Suite au défaut de stabilité de la configuration
actuelle du BWB, il serait judicieux d'apporter quelques modifications au
design de l'avion afin de le rendre statiquement stable. Le problème
venant du fait que le centre de gravité est assez proche du point
neutre, la solution la plus logique serait de déplacer vers
l'arrière ou vers l'avant certains éléments structuraux,
tels que l'aile ou les moteurs. En effet, déplacer l'aile vers
l'arrière permettrait de reculer le centre aérodynamique de
l'avion plus en arrière du centre de gravité, tandis que
déplacer les moteurs vers l'avant permettrait de reculer le centre de
gravité de l'appareil plus en avant du point neutre.
Cependant, changer la position de l'aile de l'avion pourrait
avoir une incidence significative sur l'aérodynamisme de l'appareil tout
entier, ce qui obligerait de refaire les analyses CFD. Par conséquent,
la solution qui sera implémentée dans ce travail consistera
à déplacer les moteurs de l'avion, pour les positionner sous
l'aile de l'appareil.
4.2.2.3. Configuration de l'avion, moteurs placés
sous l'aile
Déplacer les moteurs de l'arrière du fuselage
pour les placer sous l'aile de l'avion permettrait d'avancer le centre de
gravité de l'ensemble. Cette configuration du BWB avec les moteurs sous
l'aile est similaire à celle du BWB A0.30
présenté à la section 1.1.
107
Tableau 4.7 : Localisation du centre de gravité du BWB
(moteurs sous l'aile)
|
GROUPE
|
DÉTAIL DES
ÉLÉMENTS
|
MASSE
[kg]
|
CG Xi
[m]
|
Position du
CG
|
|
ÉLÉMENTS
|
Structure de la Cellule
|
|
STRUCTURAUX
|
Aile
|
2754
|
14,8
|
35%
|
|
Empennage VT
|
606
|
20,7
|
35%
|
|
Fuselage (cellule centrale)
|
4546
|
10,9
|
35%
|
|
Train d'atterrissage AV
|
244
|
2,0
|
5-10%
|
|
Train d'atterrissage AR
|
1384
|
12,6
|
Donnée par
Howe (2000)
|
|
|
|
|
Au voisinage
|
|
Groupe de Propulsion
|
5859
|
11,0
|
du CG de
|
|
|
|
|
l'avion
|
|
Équipement & Instruments
|
|
Air Conditionné
|
767
|
7,5
|
30-50%
|
|
Avioniques
|
560
|
2,5
|
10-40%
|
|
Systèmes Hydrauliques
|
85
|
10,0
|
40-50%
|
|
Systèmes Électriques
|
291
|
7,5
|
30-50%
|
|
Dégivreur
|
97
|
7,5
|
30-50%
|
|
Instruments
|
136
|
7,5
|
30-50%
|
|
Équipements de manutention
|
15
|
7,5
|
30-50%
|
|
APU
|
11
|
7,5
|
30-50%
|
|
Ensemble fournitures
|
2933
|
7,5
|
30-50%
|
|
(sièges, mobilier, etc.)
|
|
|
|
|
CHARGE UTILE
|
Passagers, y compris les bagages à main
|
8165
|
9,4
|
80-100%
|
|
Conteneurs LD-3 (qté 2)
|
2688
|
9,3
|
80-100%
|
|
Eau, nourriture,
équipements de sécurité...
|
1200
|
5,0
|
20-40%
|
|
ÉLÉMENTS
|
Équipage
|
425
|
2,5
|
10%
|
|
OPÉRATIONNELS
|
Masse de pénalité
|
209
|
5,0
|
20-30%
|
|
CARBURANT
|
Carburant Aile
|
4480
|
15,0
|
40%
|
|
Carburant CB
|
4480
|
5,8
|
50-100%
|
|
MASSES DE
|
MTOW
|
41895
|
10,10
|
|
|
L'AVION
|
OEW
|
20923
|
10,59
|
|
|
MZFW
|
32975
|
10,00
|
|
108
Ainsi, cette nouvellement configuration permet d'avancer le
centre de gravité de l'avion de 1,09 mètre à MTOW, 2,24
mètres à OEW et de 1,38 mètre à MZFW. Le point
neutre étant situé à 11,62 mètres
(c'est-à-dire en arrière de tous les centres de gravité),
il apparait d'évidence que l'avion est stable. Par ailleurs, le centre
de gravité maximum avant n'est plus à MTOW, mais plutôt
à MZFW. Le centre de gravité maximum arrière demeure
à OEW.
Le tableau 4.8 présente les valeurs de marges statiques
obtenues, avec cette nouvelle configuration.
Tableau 4.8 : Marge statique du BWB (moteurs sous l'aile)
|
Masse de
l'avion
|
Centre Xcg [m]
|
de gravité Limite
|
Marge statique Kn [%]
|
État de
stabilité
|
|
MZFW
|
10,00
|
Cg max. AV
|
9,62
|
Stable
|
|
OEW
|
10,59
|
Cg max. AR
|
6,12
|
Stable
|
|
MTOW
|
10,10
|
Cg nominal
|
9,01
|
Stable
|
Au regard des valeurs de marges statiques
présentées dans le tableau 4.8, il apparait qu'à OEW,
à MZFW et à MTOW, le BWB reste longitudinalement stable, avec une
marge statique supérieure à 5%, ce qui satisfait aux exigences
règlementaires de la FAA.
Maintenant, il serait important de se rassurer que les angles
d'équilibres de l'avion sont raisonnables. Le tableau 4.9
présente les valeurs et expressions des coefficients de moment de
l'avion, pour chaque considération de masse.
109
Tableau 4.9 : Coefficients de moment du BWB (moteurs sous
l'aile)
|
Paramètre
|
Notation
|
Valeur/Expression
|
Commentaire
|
|
|
|
Profil
|
|
|
0,0177
|
|
|
Coefficient de moment à
|
|
|
LA2573A
|
|
portance nulle du profil d'aile
|
|
|
Profil
|
|
|
- 0,1162
|
SC(2)-0712
|
|
Coefficient de moment à
|
|
0,00298
|
|
|
|
|
E-2.112
|
|
portance nulle de l'aile 3D
|
|
- 0,08503
|
|
|
Coefficient de moment à portance nulle du BWB
|
|
0, 00873
|
E-2.110
|
|
Coefficient de moment du BWB
|
|
|
E-2.101
|
Au regard des équations de droites des coefficients de
moment présentées dans le tableau 4.9, il apparait que toutes
sont à pente négative, ce qui confirme la stabilité de
l'appareil.
La figure 4.7 illustre la variation du coefficient de moment
du BWB en fonction de l'angle d'attaque, pour les trois considérations
de masse.
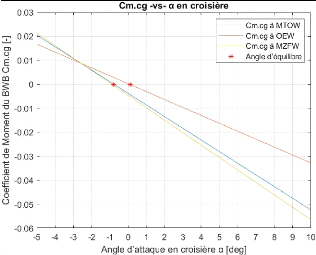
Figure 4.7 : Variation du coefficient de moment du BWB (moteurs
sous l'aile)
110
Au regard de cette figure, il en ressort que l'attitude de
l'avion à MTOW et à MZFW sera quasi identique, car les droites de
coefficient de moment sont presque confondues, avec un même angle
d'équilibre d'environ - 0,8°. Par ailleurs, à OEW l'angle
d'équilibre de l'avion se situerait à environ 0,1°. Ces
valeurs d'angles d'équilibre sont très raisonnables
comparativement à celles trouvées à la section
précédente où les moteurs étaient placés
à l'arrière du fuselage.
La stabilité de l'avion étant satisfaite, la
configuration finale du BWB sera avec moteurs placés sous l'aile. Les
figures 4.8 et 4.9 présentent le design actualisé du BWB. Comme
pour la configuration précédente, le modèle CAD de l'avion
a été réalisé à l'aile du logiciel CATIA V5,
en partant de la géométrie initiale de Velazquez (2020). Par
ailleurs, des winglets de forme trapézoïdale ont été
ajoutés au design, tel que préconisé par Delacroix (2017)
dans ses travaux sur la stabilité de l'avion. Ces winglets ont une
longueur de base correspondant à la longueur de la corde à
l'extrémité de l'aile, une hauteur de 2 mètres et un
effilement de 0,75, en concordance avec les résultats de Delacroix
(2017) sur l'analyse de la stabilité dynamique du BWB.
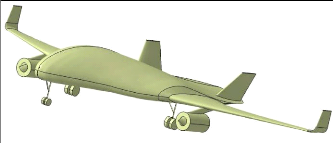
Figure 4.8 : Vue isométrique du design final du BWB
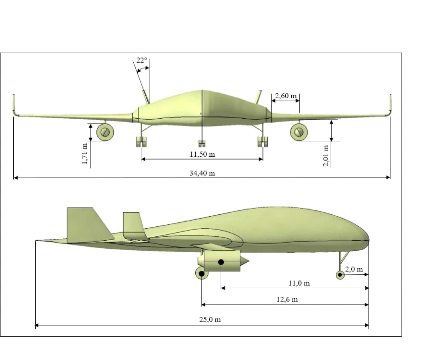
111
Figure 4.9 : Vues de face et de gauche du design final du BWB
Le profil d'aile NACA 0012 a été
sélectionné pour le design des mâts des moteurs et des
winglets, tel que l'avait considéré Delacroix (2017). L'avantage
de choisir un tel profil est que, du fait de sa symétrie, les mâts
des moteurs et les winglets ne généreront aucun moment de lacet
indésirable tant que leur incidence reste nulle.
Parvenu au terme de ce chapitre, dont l'objectif était
d'effectuer le centrage des masses de l'avion puis d'analyser sa
stabilité statique, il en ressort que, avec un point neutre situé
à 11,62 mètres du nez de l'appareil et pour des centres de
gravité maximum avant et arrière situés à 11,18 et
12,82 mètres respectivement, la configuration de l'avion avec les
moteurs placés à l'arrière du fuselage est instable. Pour
rendre l'avion stable, la solution adopter a été de changer la
position des moteurs pour les placer sous l'aile extérieure,
pareillement que pour le BWB A0.30. Avec cette nouvelle configuration,
le BWB est stable aussi bien à OEW (marge statique 6,12%), à MZFW
(marge statique 10,0%) qu'à MTOW (marge statique 9,01%) et sa marge
statique est supérieure à 5%, tel qu'exigé par la
règlementation de la FAA pour les avions de transport des passagers.
112
CONCLUSION
Le présent travail portait sur l'évaluation des
performances d'un design d'avion de ligne régional de type BWB ayant une
capacité de100 passagers, en partant des designs présentés
par Delacroix (2017) et Velazquez (2020) dans leurs travaux.
À l'issue de ce travail, il en ressort que pour les
requis de design imposés, la masse maximale de l'avion serait de 41895
kg, soit 20,2% et 6,3% de moins que les estimations faites par Delacroix (2017)
et Velazquez (2020) respectivement, sur le même appareil. Par la suite,
la poussée maximale des moteurs a été
évaluée à 168 kN, c'est-à-dire 13,0% de moins que
la valeur de 193 kN estimée par Velazquez (2020). Cette
différence assez significative vient du fait que dans ses travaux,
Velazquez a considéré que la poussée varie
linéairement avec la densité de l'air (c'est-à-dire
l'altitude), ce qui n'est pas une bonne approximation pour les moteurs de type
turbosoufflante. Dans le cadre de ce travail, le modèle de
poussée de Mattingly (Mattingly et al, 1987) a été
utilisé et le résultat obtenu se rapproche de celui des avions de
taille comparable tels que le ARJ21-900 et le Sukhoi Superjet 100.
Pour ce qui des surfaces verticales, leur design a abouti
à une configuration à double empennage, présentant un
angle d'inclinaison de 22° par rapport à la verticale, et
placés à l'arrière du fuselage. Cependant, l'optimisation
et la validation du design de ces surfaces verticales nécessitent une
analyse de la stabilité dynamique de l'avion.
Concernant les performances de l'appareil, une
évaluation détaillée des distances de décollage et
d'atterrissage a tout d'abord été effectuée. Il en est
ressorti d'une part que par rapport aux avions conventionnels à tube et
aile à l'instar du CRJ1000 de Bombardier et de l'Antonov An-158, le BWB
décollerait sur une distance de 30% moins longue. D'autre part, avec une
distance d'atterrissage assez proche de celle du CRJ1000, le BWB ne
présenterait vraisemblablement aucun avantage à l'atterrissage
par rapport aux avions classiques.
Pour finir, le centrage des masses et l'analyse de la
stabilité de l'avion a permis d'aboutir à un design stable du BWB
ayant une marge statique de 9,01% à MTOW, 6,12% à OEW et 10,0%
à MZFW, ce qui est plutôt acceptable au regard de la
réglementation de la FAA qui préconise 5% de marge statique au
moins pour un avion de ligne. Avec cette configuration, les moteurs seront
installés sous l'aile.
114
Cependant, pour parachever le design de cet avion, plusieurs
tâches restent encore à faire. Dans un premier temps une analyse
de la stabilité dynamique du BWB dans sa configuration actuelle est
nécessaire, afin de vérifier que l'avion est dynamiquement
stable. Par la suite il faudrait concevoir les systèmes de commande
manuelle et d'autopilote de l'avion, puis définir et dimensionner les
systèmes avioniques. En parallèle, la structure de l'avion
devrait être conçue et dimensionnée, suivant les exigences
règlementaires en vigueur (RAC et/ou FAR). Une fois cela fait, le design
intérieur (cockpit, ameublement, soute, etc.) de l'avion pourra
être finalisé. Par ailleurs, il serait tout de même
très intéressant que construire un modèle réduit de
ce BWB tel que la NASA et Boeing l'ont fait avec la série de BWB
X-48, ou encore le projet VELA avec le BWB A0.30. Ce
prototype permettrait d'effectuer diverses analyses afin d'améliorer
puis de valider le design définitif de l'avion.
ANNEXE I
AVIONS COMMERCIAUX MOYEN-COURRIERS (CAPACITÉ 100
PASSAGERS ENVIRON)
|
Modèle
|
Antonov An-
148
|
BAe 146/Avro RJ-
300/RJ100
|
CRJ1000
|
ARJ21-900
|
Sukhoi Superjet
100
|
|
Source
|
[a]
|
[b]
|
[c]
|
[d]
|
[e]
|
|
Caractéristiques commerciales
|
|
Catégorie
|
Regional jet
airliner
|
Regional jet airliner
|
Regional jet airliner
|
Regional jet airliner
|
Regional jet
airliner
|
|
Constructeur
|
Antonov
|
British Aerospace
|
Bombardier
Aviation
|
Comac
|
Sukhoi
|
|
Pays d'origine
|
Ukraine
|
United Kingdom
|
Canada
|
Chine
|
Russia
|
|
Equipage
|
2
|
2
|
2
|
2
|
2
|
|
Cabin crew
|
2-3
|
2-3
|
2-3
|
2-3
|
2-3
|
|
Passagers max
|
99
|
97-112
|
97 to 104
|
105 (1-class)
|
108 (1-class)
|
|
Statut
|
En service
|
En service
|
En service
|
En service
|
En service
|
|
Mise en service
|
April 2010
|
May 1983
|
-
|
June 2016
|
April 2011
|
|
Caractéristiques
géométriques
|
|
Longueur (m)
|
30,83 m (101 ft
2 in)
|
31 m (102 ft)
|
128 ft 5 in / 39,1 m
|
36,35 m (119 ft 3 in)
|
29,94 m (98 ft 3
in)
|
|
Envergure (m)
|
28,91 m (94 ft
10 in)
|
26,34 m (86,4 ft) span
|
85 ft 11 in / 26,2 m
|
27,28 m (89 ft 6 in)
|
27,80 m (91 ft 2
in)
|
|
Hauteur (m)
|
8,19 m (26 ft 10
in)
|
8,61 m (28,2 ft)
|
24 ft 6 in / 7,5 m
|
8,44 m (27 ft 8 in)
|
10,28 m (33 ft 9
in)
|
|
Surface alaire
|
87,32 m2 (939,9 ft2)
|
77,3 m2 (832 ft2)
|
833 ft2 / 77,4 m2
|
79,86 m2 (859,6 ft2)
|
83,80 m2 / 902 ft2
|
116
|
Masse et capacité d'emport
|
|
OEW
|
22000 kg
(49000 lb)
|
25640 kg (56530 lb)
|
51120 lb (23188 kg)
|
26770 kg (59020 lb)
ER
|
25100 kg (55300
lb)
|
|
Max. payload
|
5000 kg (11000
lb)
|
11781 kg (25970 lb)
|
26380 lb / 11966 kg
|
-
|
12245 kg (26996
lb)
|
|
MTOW
|
43700 kg
(96300 lb)
|
44225 kg (97500 lb)
|
91800 lb / 41640 kg
|
47182 kg (104019 lb)
ER
49450 kg(ER)
|
(109020 lb)
|
|
Max Fuel
|
12050 kg
(26570 lb)
|
12901 L (3408 US gal)
|
19450 lb / 8822 kg
|
-
|
15805 L (4175
US gal), 12 328
kg
|
|
fs_OEW
|
0,503
|
0,560
|
0,557
|
0,567
|
0,508
|
|
Motorisation
|
|
Type
|
Turbofan
|
Turbofan
|
Turbofan
|
Turbofan
|
Turbofan
|
|
Références
|
Progress D-436-
158
|
BAe 146 : Lycoming ALF
502R-5
|
GE CF34-8C5A1
|
General Electric
CF34-10A
|
SaM146-1S18
|
|
Poussée unitaire
|
15100 lbf; 67,0
kN
|
6990 lbf (31,1 kN)
|
14510 lbf / 64,5 kN
|
82 kN (18500 lbf)
|
71,6 kN (16100
lbf)
|
|
Nombre de
moteurs
|
2
|
4
|
2
|
2
|
2
|
|
Poussée totale
|
30200 lbf; 134,0
kN
|
27960 lbf (124,4 kN)
|
29020 lbf / 129,0
kN
|
164 kN (37000 lbf)
|
143,2 kN (32200 lbf)
|
|
Performances
|
|
Vitesse de
croisière
|
800 to 870 km/h (430 to 470 kn)
|
Mach 0,7 (404 kt; 747
km/h)
|
Mach 0,78 (447 kt,
829 km/h)
|
Mach 0,78 (828 km/h, 447 kt, 514 mph)
|
Mach 0,78-0,81
(828-870 km/h /
448-469 kt)
|
|
Vitesse max
|
-
|
Mach 0,739 (426 kt; 789
km/h)
|
0,82 Mach (470 kt,
871 km/h)
|
Mach 0,82 (870 km/h, 470 kt, 541 mph)
|
-
|
|
Ratio Poussée-
Poids
|
0,313
|
0,286
|
0,316
|
0,355
|
0,295
|
117
|
Rayon d'action
|
2500 km (1300
nmi)
|
100 PAX : 3340 km (1800
nmi)
|
1622 NM / 3004 km (ER)
|
1800 NM (3300 km;
2100 nmi) ER
|
4578 km (2472
nmi)
|
|
Plafond
|
12200 m (40000
ft)
|
35000 ft (11000 m)
|
41000 ft / 12479 m
|
11900 m (39000 ft)
|
12500 m (41000
ft)
|
|
Takeoff (MTOW)
|
1900 m (6200
ft)
|
1535 m (5036 ft)
|
6955 ft / 2120 m
(ER)
|
1950 m (6400 ft) ER
|
2052 m (6732 ft)
|
|
Landing (SL,
ISA)
|
-
|
1270 m (4170 ft)
|
5740 ft / 1750 m
|
-
|
-
|
Sources :
[a] Antonov An-148
https://en.wikipedia.org/wiki/Antonov
An-148
[b] BAe 146/Avro RJ-300/RJ100
https://en.wikipedia.org/wiki/British
Aerospace 146
[c] CRJ1000
https://en.wikipedia.org/wiki/Bombardier
CRJ700 series
[d] Comac ARJ21-900
https://en.wikipedia.org/wiki/Comac
ARJ21
[e] SSJ 100
https://en.wikipedia.org/wiki/Sukhoi
Superjet 100

ANNEXE II
APPROCHE CLASSIQUE DE DESIGN CONCEPTUELLE D'UN
AÉRONEF
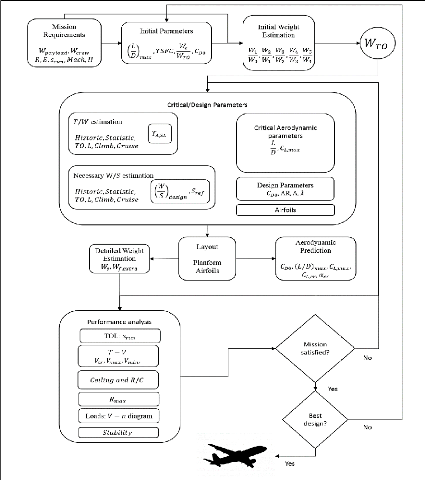
Figure-A II-Schéma du design conceptuel d'un
aéronef, basé sur les travaux de
Anderson (2001) et Raymer
(2006) (Velazquez, 2020)
120
Figure-A III- Positions tridimensionnelles des profils de design
du BWB (Velazquez, 2020)
ANNEXE III
POSITION DES PROFILS DE DESIGN DU BWB (Velazquez,
2020)
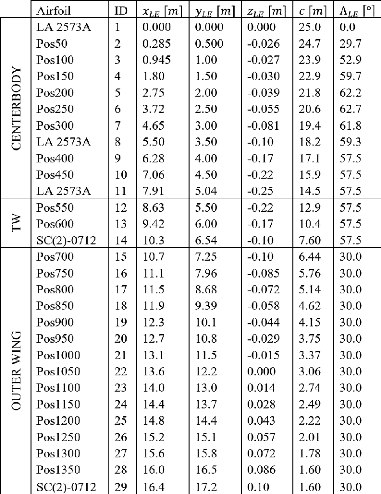
121
ANNEXE IV
VISUALISATION DU DESIGN DU BWB AVEC MOTEURS À
L'ARRIÈRE DU
FUSELAGE
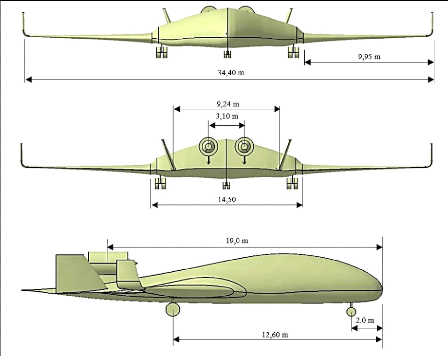
Figure-A IV-1 Vues de face, de l'arrière et de la gauche
du BWB, configuration « moteurs à l'arrière du fuselage
»
122
Figure-A IV-2 Multi-vue du BWB, configuration « moteurs
à l'arrière du fuselage »
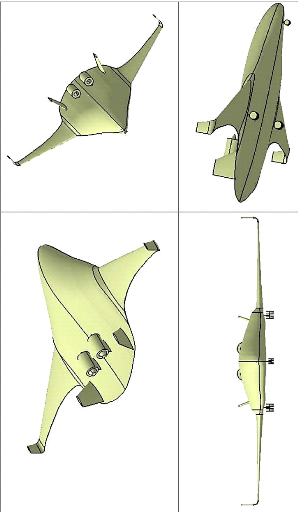
ANNEXE V
Figure-A V-1 Vues de face, de dessus et de l'arrière du
BWB, configuration « moteurs sous
l'aile »
VISUALISATION DU DESIGN DU BWB AVEC MOTEURS SOUS
L'AILE
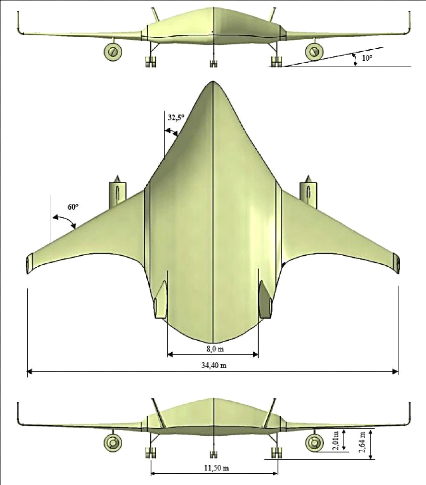
124
|
1
|
11
|
|
,
|
1
|
|
|
|
|
AO
|
|
I19.
|
|
|
N
|
|
|
|
|
|
'V
|
|
|
s'
|
|
<--------` '
|
|
Figure-A V-2 Multi-vue du BWB, configuration « moteurs sous
l'aile »
Howe, D. (2000). Aircraft Conceptual Design Synthesis.
Professional Engineering Publishing Limited, London and Bury ST Edmunds, UK,
2000.
LISTE DE RÉFÉRENCES
BIBLIOGRAPHIQUES
Creech, Gray, et al. «X-48 Project Completes Flight Research
for Cleaner, Quieter Aircraft.» NASA, 7 June 2013, <
http://www.nasa.gov/centers/dryden/news/NewsReleases/2013/13-08.html>.
Consulté en Juin 2021.
Anderson, J. D. (1999). Aircraft performance &
design. McGraw-Hill Science Engineering.
Bardela, P. A. (2017). Identification et validation du
modèle mathématique du moteur de l'avion d'affaire Cessna
Citation X par essais en vol (Doctoral dissertation, École de
Technologie Supérieure).
Bradley, K. R. (2004). A sizing methodology for the conceptual
design of blended-wing-body transports. NASA CR, 213016, 2004.
Cook, M. V. (2012). Flight dynamics principles: a linear
systems approach to aircraft stability and control.
Butterworth-Heinemann.
Corke, T. C. (2003). Design of aircraft. Englewood Cliffs, NJ:
Prentice Hall.
Delacroix, T. (2017). Étude de stabilité
statique et dynamique d'un avion Blended-Wing-Body de 100 passagers
(Maîtrise en Sciences Appliquées, École de Technologie
Supérieure).
Gibbs, Yvonne. « Corps d'aile hybride / mixte X-48 ».
NASA, 6 juillet 2017, <
http://www.nasa.gov/centers/armstrong/news/FactSheets/FS-090-DFRC.html>.
Consulté en Juin 2021.
126
Howe, D. (2001). Blended wing body airframe mass prediction.
Kundu, A. K., Price, M. A., & Riordan, D. (2019). Conceptual
Aircraft Design: An Industrial Approach. John Wiley & Sons.
Kozek, M., & Schirrer, A. (2015). Modeling and control for a
blended wing body aircraft. In Advances in industrial control (pp.
1-308). Springer International Publishing Cham.
Larrimer, Bruce I. Au-delà du tube et de l'aile : le
corps à voilure mixte X-48 et la quête de la
NASA pour remodeler les futurs avions de transport.
Nasa, 2020.
Larkin, G., & Coates, G. (2017). A design analysis of
vertical stabilisers for Blended Wing Body aircraft. Aerospace science and
technology, 64, 237-252.
Liebeck, R. H. (2004). Design of the blended wing body subsonic
transport. Journal of aircraft, 41(1), 10-25.
Mattingly, J. D., Heiser, W. H., & Daley, D. H. (1987).
Aircraft engine design (No. BOOK). AIAA.
MAVERIC Press Release, Airbus (2020a),
<file:///C:/Users/CanBec/Downloads/EN-MAVERIC-Airbus-reveals-its-blended-wing-aircraft-demonstrator%20(1).pdf>.
Consulté le 8 Juillet 2021.
MAVERIC demonstrator, Airbus (2020b),
<
https://www.airbus.com/newsroom/stories/Imagine-travelling-in-this-blended-wingbody-aircraft.html>.
Consulté le 8 Juillet 2021.
Megson, T. H. G. (2016). Aircraft structures for engineering
students. Butterworth-Heinemann.
127
Obert, E. (2009). Aerodynamic design of transport aircraft. IOS
press.
Okonkwo, P. P. C. (2016). Conceptual design methodology
for blended wing body aircraft (Doctoral dissertation, Cranfield
University).
Raymer, D. P. (2006). Aircraft Design: A Conceptual Approach and
Rds-student, Software for Aircraft Design, Sizing, and Performance Set (AIAA
Education): AIAA (American Institute of Aeronautics & Ast).
Reist, T. A., & Zingg, D. W. (2013). Aerodynamic Shape
Optimization of a Blended-WingBody Regional Transport for a Short Range
Mission. Paper presented at the 31st AIAA Applied Aerodynamics Conference, 24
June 2013, Reston, VA, USA.
Rose, B. (2010). Flying Wings and Tailless Aircraft.
Midland.
Sadraey, M. H. (2012). Aircraft design: A systems engineering
approach. John Wiley & Sons.
Schmidt, A., & Brunswig, H. (2006, September). The A0. 30
blended wing body configuration: development and current status 2006. In Proc.
25th International Congress of the Aeronautical Sciences, Hambourg, Germany.
Scholz, D. (2007). A Student Project of a Blended Wing Body
Aircraft-From Conceptual Design to Flight Testing. In EWADE 2007-8th
European Workshop on Aircraft Design Education.
Thomas Netzel et al (2013) The project A0.30, Manchester
Metropolitan University. <
https://www.mmu.ac.uk/media/mmuacuk/content/documents/carpe/2013-conference/papers/creative-engineering/Thomas-Netzel-et-al.pdf>.
Consulté en Juin 2021.
128
Torenbeek, E. (2013). Advanced aircraft design: conceptual
design, analysis and optimization of subsonic civil airplanes. Chichester, West
Sussex, United Kingdom: John Wiley & Sons.
van Dommelen, J., & Vos, R. (2014). Conceptual design and
analysis of blended-wing-body aircraft. Proceedings of the Institution of
Mechanical Engineers, Part G: Journal of
Aerospace Engineering, 228(13), 2452-2474.
doi:10.1177/0954410013518696
Velazquez, O. (2020). Numerical Analysis of the Multi-Section
Nature of the Regional Blended Wing Body Aircraft at Low Speed (Doctoral
dissertation, École de Technologie Supérieure).
Wan, T., & Yang, H. (2010, January). Aerodynamic
performance investigation of a modern blended-wing-body aircraft under the
influence of heavy rain condition. In Proceedings of the 27th International
Congress of Aeronautical Sciences (ICAS), Nice, France.
| 

