I.4.1. Domaine de sécurité :
? Les quadrotors sont utilisés par Les services de
secours (police, sapeurs-pompiers et gendarmerie) pour l'évaluation des
dégâts en cas de catastrophe naturelle afin de prendre des
informations stratégiques sur des interventions en hauteur et
délicates (exemples: victimes d'avalanches, victimes d'inondations et de
tremblement de terre, repérage des feux de forêts, l'exploration
des zones radioactives, les volcans etc...)
? Inspection des ouvrages d'art tels les ponts, les viaducs,
les barrages.
? La surveillance maritime (voies maritimes, trafic de drogue,
détection des pollutions par hydrocarbures, la surveillance urbaine, des
manifestations, ainsi que les frontières).
? missions militaires de reconnaissance et support de
combat.
Chapitre I Généralité sur les
drones
10
I.4.2. Domaine civil :
? Dans le domaine civil, les quadri-rotors sont conçue
pour explorer des situations difficiles d'accès, comme des montagnes,
des canyons. Ils serviraient à faire prises de vue aériennes
inédites et des vidéos pour des chaînes télé
comme (des reportages sur des lieux isolés de la terre, des
documentaires, films, etc..).
? Inspection des ouvrages d'art tels les ponts, les viaducs,
les barrages.
? Etudes scientifiques (topographie et cartographie,
Étude de l'atmosphère, des sols (géologie) et des
océans).
? Transport et livraisons des produits légères
sur de courtes distances comme (Les colis postaux, boites de pizza, etc...).
I.5. Description général du quadrotor :
Un quadrotor est un robot mobile aérien à quatre
rotors définit par six degrés de liberté dans l'espace (3
axes X, Y, Z) Figure 17. [1-2]. Ces 4 rotors sont
généralement placés aux extrémités d'une
croix, et l'électronique de contrôle est habituellement
placée au centre de la croix. Afin d'éviter à l'appareil
de tourner sur lui-même sur son axe de lacet, il est nécessaire
que deux hélices tournent dans un sens, et les deux autres dans l'autre
sens. Pour pouvoir diriger l'appareil, il frauder que chaque couple
d'hélice tournant dans le même sens soit placé aux
extrémités opposées d'une branche de la croix. Le
fonctionnement d'un quadrotor est assez particulier.
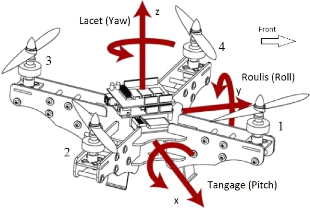
Figure 1.7 : Les mouvements de bases du
quadrotor.
En faisant varier astucieusement la puissance des moteurs, il
est possible de le faire monter/descendre, de l'incliner à gauche/droite
(roulis) ou en avant/arrière (tangage) ou encore de le faire pivoter sur
lui-même (lacet) [3], le quadrotor a six degrés de
libertés, trois mouvements de rotation et trois mouvements de
translation, ces six degrés doivent être commandés à
l'aide de quatre déclencheurs
Chapitre I Généralité sur les
drones
11
Chapitre I Généralité sur les
drones
12
seulement; Donc c'est un système sous actionné
(le nombre des entrées inférieure au nombre des sorties).
| 

