III.2.10. La carcasse du quadrotor et du transmetteur
RF:
Le châssis c'est l'élément central du
drone qui détermine son envergure totale. La réalisation d'un
quadrotor de petite taille exige l'utilisation d'un cadre léger, rigide
et harmonique. Ainsi pour le transmetteur RF, il faut couvrir le circuit
imprimé avec une carcasse confortable pour faciliter l'utilisation et
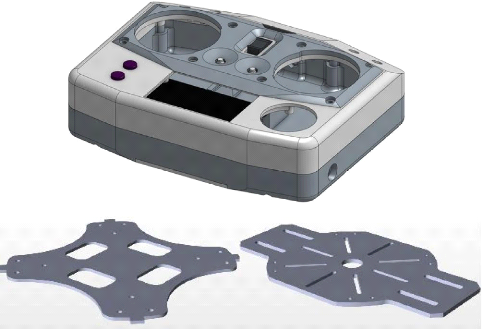
pour le protégé. L'impression en 3D m'a permis de construire les
carcasses voulus à base de nylon ultra polyamide (PLA) en utilisant les
fichiers sources du logiciel SOLID WORKS [15] Figure 3.12.
Chapitre III Conception et mise en oeuvre du
fonctionnement
Figure 3.12 : Les carcasses construites avec logiciel
SOLID WORKS en 3D.
L'architecture du châssis du quadrotor est
optimisée permettant de dégager beaucoup d'espace pour que les
composants soient installés sans difficulté, pour cela j'ai
construit un circuit imprimé permettant de faire le câblage des
ESC et le contrôleur de vol avec la batterie plus facilement comme le
montre la Figure 3.13.
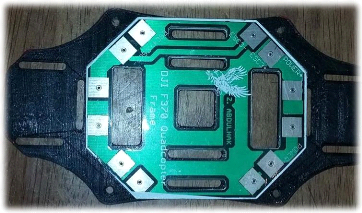
Figure 3.13 : Circuit imprimé du plat inferieur
réalisé avec logiciel Eagle CAD soft.
35
Chapitre III Conception et mise en oeuvre du
fonctionnement
36
III.3. Réalisation du transmetteur RF : III.3.1.
Schéma électronique :
Le circuit électronique de l'émetteur radio 2,4
GHz Figure 3.14, est basé d'un microcontrôleur
Atemega328, NRF24l01 et deux joysticks. Il avait 6 canaux de transmission qui
corresponds aux commandes (Pitch, Roll, Yaw, Throttle et les deux commutateurs
SW1 et SW2).

Figure 3.14 : Schéma électronique du
transmetteur RF 2.4 GHz.
Au niveau de l'alimentation nous devons fournir les 12 volts
de la batterie à l'entrée de l'Arduino Nano et au
régulateur de tension 3.3V. Ce dernier est nécessaire pour faire
chuter la tension de 12V à 3.3V, parce que le module NRF24 fonctionne
à cette tension et en plus il absorbe trop de courant ainsi que
l'Arduino ne pourra pas fournir autant de courant. La sortie négative de
la batterie est connecté à l'une des broches GND de l'Arduino et
la sortie positive à l'interrupteur ON / OFF, l'autre broche du
commutateur ira directement à la broche Vin de l'Arduino et à
l'entrée du régulateur de tension 3.3V. Les broches CE et CSN de
la NRF24 doivent être branchées sur les pins numériques de
l'Arduino Nano qui correspondent aux même sens déclaré dans
le programme principale. Même pour les auteurs broches MISO, MOSOI et CLK
qui sont dédiés pour la communication SPI.
Chacun des 4 potentiomètres est connecté aux
entrées analogiques A0, A1, A2 et A3 de l'Arduino Nano. Nous devons
d'abord fournir 5 volts à la broche droite de chaque
potentiomètre et la masse à la broche gauche. De cette
manière, nous aurons 0 volts aux entrées analogiques quand le
potentiomètre est dans la plus basse position et 5 volts quand il est
dans la plus haut et n'importe
Chapitre III Conception et mise en oeuvre du
fonctionnement
quelle tension (de 0 à 5 volts) dans l'intervalle.
L'Arduino Nano a un convertisseur analogique numérique (ADC) de 10 bits
qui nous donnera des valeurs de 0 à 1024 unités. Les deux canaux
de commutateurs SW1 et SW2 sont des canaux numériques et ne sont pas
identiques à celles des potentiomètres, car ils n'ont que des
valeurs de 0 et 1 logique. Le circuit imprimé double face du
transmetteur RF Figure 3.15 est réalisé à
l'aide du logiciel Eagle CAD soft.
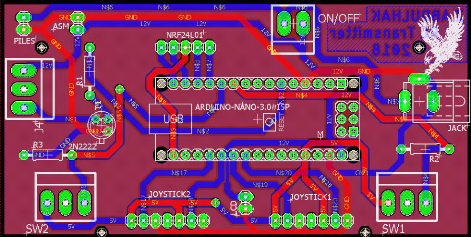
Figure 3.15 : Schéma du circuit imprimé
du transmetteur RF 2.4 GHz.

Figure 3.16 : Transmetteur RF 2.4 GHz durant la
réalisation.
37
| 

