III.2.7. Arduino Nano :
L'Arduino Nano est une carte petite, complète et
facile à utiliser basée sur l'ATmega328 Figure
3.8. Il a plus ou moins la même fonctionnalité de
l'Arduino Uno, mais dans un package différent. Il ne dispose que d'une
prise d'alimentation DC et fonctionne avec un câble USB Mini-B au lieu
d'un câble standard pour se connecté au PC. L'Arduino Nano peut
être alimenté via une alimentation externe non
régulée 6-20V (broche 30) ou Alimentation externe
régulée 5V (broche 27).
Chapitre III Conception et mise en oeuvre du
fonctionnement
33
La source d'alimentation est automatiquement
sélectionnée pour la source de tension la plus
élevée. Il est généralement destiné pour des
réalisations qui nécessitent la miniaturisation et à
l'installation semi-permanente dans des objets ou des expositions, on l'utilise
souvent dans la réalisation du transmetteur RF.
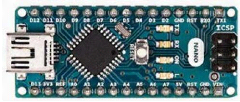
Figure 3.8 : Arduino Nano.
III.2.8. Module radio NRF24l01 2.4GHz :
Notre système quadrotor reçoit des
données de contrôle en temps réel, il a donc besoin d'avoir
un système radio de bonne qualité. Le transmetteur RF a besoin
d'un module puissant pour envoyer le signal assez loin, mais le
récepteur peut avoir un type normal d'antenne PCB. Le module radio que
j'ai utilisé est celui avec l'antenne à puissance
amplifiée, Figure 3.9.

Figure 3.9 : NRF24l01 Radio module 2.4GHz.
L'NRF24l01 est un module émetteur-récepteur qui
utilise la bande de 2,4 GHz et peut fonctionner avec un débit de 250
Kbps à 2 Mbps à l'air libre. La consommation d'énergie de
ce module est juste d'environ 12 mA au cours de la transmission et la tension
de fonctionnement est de 1,9 Volts à 3,3 Volts. Le module NRF24L01 envoi
et reçoit des données dans des «paquets» de plusieurs
octets à la fois et la communication avec le microcontrôleur se
fait via le protocole de communication SPI. L' NRF24L01 peut utiliser
jusqu'à 125 canaux différents, ce qui permet d'avoir un
réseau de 125 modems indépendants en un seul module. Ces
unités ont beaucoup de complexité interne, mais certaines
personnes talentueuses ont écrit des bibliothèques Arduino qui
nous facilitent la tâche et nous donne beaucoup de liberté en
programmation.
Chapitre III Conception et mise en oeuvre du
fonctionnement
III.2.9. Les joysticks :
Les parties les plus importantes du contrôleur radio
sont les joysticks, mieux dits, les potentiomètres. Un joystick
Figure 3.10, est un dispositif de contrôle du curseur
utilisé dans les jeux informatiques et la technologie d'assistance
basé sur des potentiomètres. Le joystick qui a obtenu son nom du
bâton de contrôle utilisé par un pilote pour contrôler
les ailerons et les ascenseurs d'un avion, c'est un levier à main qui
pivote sur une extrémité et transmet ses coordonnées par
l'intermédiaire d'un microcontrôleur.
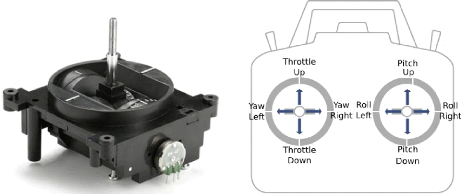
Les émetteurs radiocommande des quadrotors comportent
deux potentiomètres de précision dans chaque joystick, dont ils
varient la valeur de la résistance en fonction des accès de
contrôle pour les mouvements Pitch, Roll, Yaw et Throttle, Figure
3.11.
34
Figure 3.10 : Joystick de haute qualité. Figure
3.11 : Commandes de vol du drone.
Dans ce contexte, on utilise l'Arduino Nano pour convertir le
signal d'entrée de chaque potentiomètre en un signal
numérique, puis le module radio NRF24101 permettra d'envoyer les
variations de ces valeurs au récepteur du drone. En fait, ces valeurs
numériques correspondent à la position du bâton de
contrôle de chaque joystick.
| 

