I.6.2. Le mouvement de roulis (Roll) :
La Figure 1.9 montre bien comment un
mouvement de roulis est obtenu. Dans ce cas, on applique un couple autour de
l'axe x, c'est-à-dire en appliquant une différence de
poussée entre les rotors (1, 2) et les rotors (3, 4). Ce mouvement
(rotation autour de l'axe x) est couplé avec un mouvement de translation
selon l'axe y.

Figure 1.9 : Illustration du mouvement de roulis
(Roll).
I.6.3. Le mouvement de tangage (Pitch) :
La Figure 1.10 montre comment un mouvement de
tangage est obtenu. Dans ce cas, on applique un couple autour de l'axe y,
c'est-à-dire en appliquant une différence de poussée entre
le rotor (1, 4) et les rotors (2, 3). Ce mouvement (rotation autour de l'axe y)
est couplé avec un mouvement de translation selon l'axe x.

Chapitre I Généralité sur les
drones
13
Figure 1.10 : Illustration du mouvement de tangage
(Pitch).
I.6.4. Le mouvement de lacet (Yaw) :
La Figure 1.11 montre comment le mouvement de
lacet est obtenu. Dans ce cas, nous voulons appliquer un couple autour de l'axe
z, qui est fait en appliquant une différence de vitesse entre
les rotors (1,3) et (2,4). Ce mouvement n'est pas un résultat direct de
la poussée produit par les propulseurs mais par les couples
réactifs produits par la rotation des rotors.
La direction de la force de poussée ne décale
pas pendant le mouvement, mais l'augmentation de la force de portance dans une
paire de rotors doit être égale à la diminution des autres
paires pour s'assurer que toute la force de poussée demeure la
même.

Figure 1.11 : Illustration du mouvement de lacet
(Yaw).
Chapitre I Généralité sur les
drones
14
I.6.5. Le mouvement de translation horizontale :
La Figure 1.12 montre comment la translation
horizontale est réalisée. Dans ce cas, nous voulons appliquer une
force le long de x ou de y qui est fait en inclinant le corps
(par le tangage ou le roulement) et en augmentant toute la poussée
produite pour garder l'importance du composant de z de la
poussée égale à la force de pesanteur.
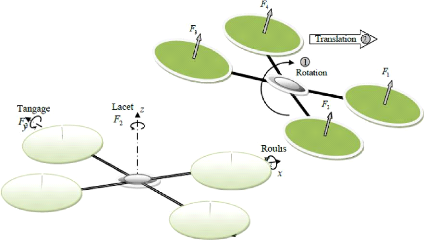
Figure 1.12 : Illustration du mouvement de translation
horizontale.
Chapitre I Généralité sur les
drones
15
I.7. Conclusion :
Ce chapitre permet au lecteur d'avoir des concepts
préliminaires sur les différentes catégories des robots
volants plus particulièrement les quadrotors et leur principe de
fonctionnement. Dans le chapitre suivant nous donnons plus de détaille
sur les paramètres dynamiques affectant l'orientation du quadrotor, les
équations mathématiques et la modélisation de
Newton-Euler.
| 

