Acionamento de motores de induà§à£o através de inversores de frequàªnciapar Donatien Nsiangani Ngamuba UNILINS - Bachelor 2020 |

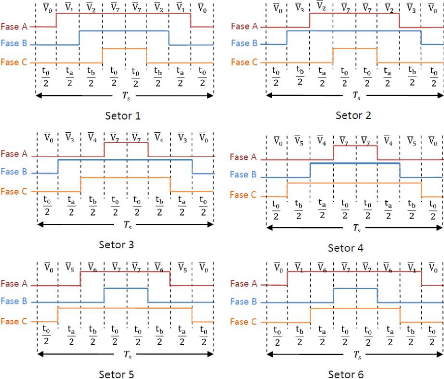
v3. ????????? .????. ?????? (?????? = 3 - ??) (38) ?? ???? v3.????????????? = . ????. ??????(??) (39) ?????? ???? + ???? - ???? ??0 = (40) Agora que já é possível calcular os tempos e, identificar em qual setor o vetor de referência se encontra, deve-se determinar a ordem em que será aplicada aos interruptores. Embora a sequência de aplicaçâo dos vetores nâo altere o valor médio, ela tem grande influência nas perdas por potência por comutaçâo e no conteúdo harmônico. (NICOLAU, 2007, p.27) A Figura 21 mostra uma possível sequência de comutaçâo dos interruptores e como deve ser feito a comutaçâo em cada setor.
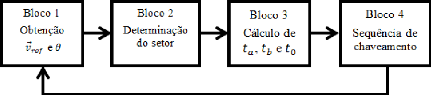
43 Figura 21 - Sequência de chaveamento para os seis setores do plano complexo (Fonte: FLORES, 2009.) O padrão de comutação dos interruptores da Figura 22 propicia uma melhor distribuição das componentes harmônicas, pelo fato de existir uma simetria na forma de onda e, também, reduz o número de comutações dos interruptores o que aumenta a vida útil dos mesmos. (CHILET, 2003, p. 17) Enquanto o vetor de referência estiver em um setor, o inversor deverá repetir a sequência de comutação dos interruptores deste setor até que o vetor mude para o próximo setor. A técnica de modulação vetorial irá aplicar uma tensão muito semelhante à tensão obtida com a modulação senoidal. No entanto, ao se analisar o seu espectro (tensão de fase), nota-se a presença de uma componente de terceira harmônica, o que não ocorre na modulação senoidal. (FLORES, 2009, p.33) 44 A Figura 22 mostra a representação do algoritmo básico para a implementação da modulação vetorial.
Figura 22 - Algoritmo básico para implementação da modulação vetorial (Fonte: FLORES, 2009.) Seguindo-se a Figura 22, a modulação vetorial pode ser realizada da seguinte forma para cada período de amostragem:
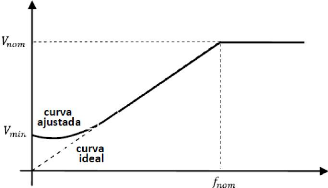
6.5. Tipos de controlesNa maioria das aplicações com inversores de frequência, o controle de partida e a variação de velocidade são suficientes. Para estas características, os chamados inversores de frequência com controle escalar satisfazem estas condições. Porém, algumas limitações são impostas neste tipo de controle, como o limite de torque quando operando com baixas frequências. Este tipo de controle opera em malha aberta. A fim de se conseguir um ajuste de torque com baixíssimas frequências, através do equacionamento da máquina elétrica e de modelos matemáticos, o inversor de frequência com controle vetorial foi desenvolvido. Com isso, máquinas que antes tinham que ser controladas por motores C.C, agora passam a ser operadas por motores de indução, devido a este tipo de controle. 45 6.5.1. Controle escalerUm método de controle de velocidade de motores de indução com relativa simplicidade, que leva em conta apenas a relação tensão/frequência, é chamado de controle escalar. Com o controle escalar não é possível alcançar uma elevada precisão em determinadas aplicações, mas o custo para a implementação é baixo e sua simplicidade fazem com que essa técnica de controle de velocidade seja muito utilizada. No controle escalar, é possível obter uma precisão de velocidade de até 0,5 % da rotação nominal do motor sem que haja variação na carga e de 3 a 5%, quando houver variação mecânica, de 0 a 100% do conjugado nominal (PAIXO, 2009, p. 41). A relação tensão/frequência representa o fluxo magnético, como pode ser visto na Equação 41, onde é a tensão no estator e é a frequência. V ???? = (41) ?? Em aplicações onde se deseja que o torque do motor seja mantido constante, é necessário manter o fluxo magnético também constante. Quando a tensão for variada a frequência também deve ser variada na mesma proporção (BENEDITO, 2011, p.121), como mostrado na Figura 23.
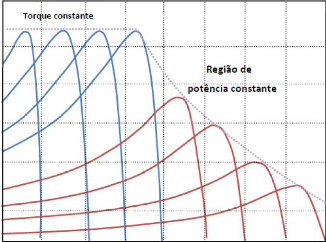
Figura 23 - Curva V/f do controle escalar. (Fonte: FLORES, 2009.) 46 Em condições ideais, a variação da frequência neste tipo de controle é feita linearmente até que seja obtida a tensão nominal do motor, mas, para frequências baixas, a curva é ajustada a fim de compensar a queda de tensão na impedância da estator, como mostrado na Figura 23. Percebe-se também pela Figura 23, que o é possível aumentar a frequência acima da frequência da rede, mas, no entanto, a tensão não é aumentada acima da nominal; essa limitação de tensão pode ser tanto pelas características do motor ou pela capacidade de fornecimento da rede. Considerando também que não é interessante o motor trabalhar acima das condições nominais. Como existem várias configurações em que a razão V/f é mantida constante, é possível trabalhar com várias curvas para o torque, o que torna possível mantê-lo constante em várias velocidades, como mostrado na Figura 24.
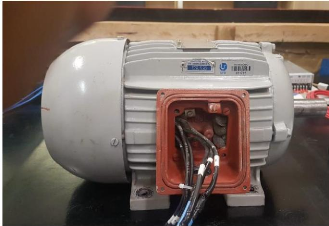
Figura 24 - Região de enfraquecimento de campo (Fonte: FLORES, 2009.) O inversor de frequência com controle escalar tem por finalidade controlar a velocidade dos motores de indução. A relação tensão/frequência possui curvas predeterminadas e, com isso, é possível utilizar este modelo na maioria dos controles de velocidade. É importante salientar que neste tipo de controle, quando um grau de precisão e torque é exigido, o modo escalar não consegue manter uma 47 relação precisa, ficando limitado a aplicações em que não necessita da rotação próxima de zero (BENEDITO, 2011, p.117). Com o objetivo de estudar o controle escalar foi feito uma montagem prática. Para isso utilizou-se um motor de indução de 5 CV Figura 25 e um inversor de frequência WEG CFW 09 Figura 26.
Figura 25 - Motor de indução de 5 CV (Fonte: Autores)
48 Figura 26 - Inversor de frequência (Fonte: Autores) Após a montagem foi configurado o inversor para o controle escalar e obtidos os pontos representados na Tabela 3
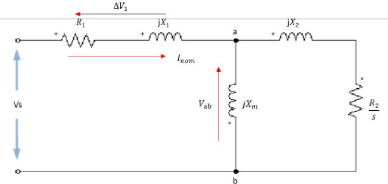
Tabela 3 - Relação V/F colhida Logo, pode-se verificar que a relação V/f com a frequência muito baixa vai aumentando. Assim caracterizando o enfraquecimento de fluxo mostrado na Figura 23 na curva ajustada. Para explicar melhor a questão do enfraquecimento de fluxo para baixas frequência recorre-se ao circuito equivalente do motor de indução apresentado na Figura 27.
49 Figura 27 - Circuito equivalente do motor de indução (Fonte: Autores) Na Equação 41 a relação que o fluxo tem entre a tensão e a frequência é constante, como já elucidado anteriormente. Porém, essa informação pode ser expressada de forma mais detalhada através da Equação 42. ????-???1 ???? = (42) Conforme ???? vai diminuindo a subtração com ???1 começa a fazer diferença na divisão. Formalizando em palavras, a queda de tensão em baixas frequências é alta, afetando assim, significativamente a magnitude da corrente de produção de fluxo magnetizante. |
|