Annex
1-Matériels et Environnement:
1-1-support de travail :
· Pentium 4 3.4GHz.
· 512 Mb de mémoire vive.
· 80 Go la taille du disque dure.
· Carte graphique (nVidia GeForce FX 5500).
1-2-Langage de programmation :
pour la réalisation de notre logiciel on a utilisés
le langage de programmation `'Borland C++Builder.6''.
Borland C++Builder est un environnement de programmation visuelle
orienté objet permettant le développement d'applications 32 bits
en vue de leur déploiement sous Windows et sous Linux. En utilisant
C++Builder, on peut créer de puissantes applications avec un minimum de
programmation, grace à La diversité de ses outils,et de ses
composants de son menu principale.
Et en plus nous avons utilisé la bibliothèque SDL
et OpenGL pour l'affichage du terrain.
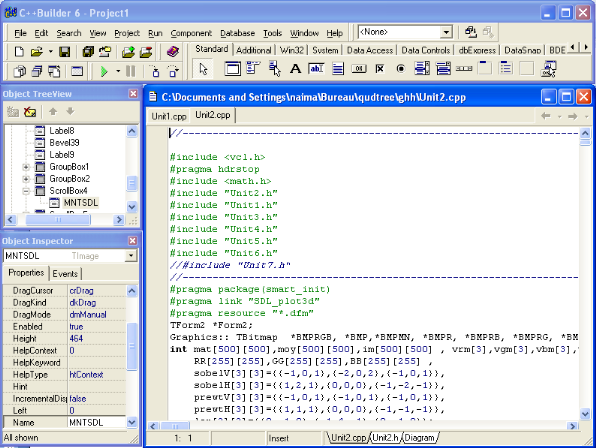
figure-01- la page principale de 'Borland C++Builder.6
2. Présentation du logiciel:
2-1- Interface principale:
la fenêtre principale est composée de 5 menus
principaux qui regroupent les différents prétraitements, ainsi
que les différents méthodes de segmentation et de
modélisation présentées dans les chapitres
précédents.

2-1-1- menu (1) :chargement des
images :
- il permet de charger des images multi spectrales (RGB).
- il permet aussi de fusionner les carnaux (canal R, canal G,
canal B) pour avoir des images multi spectrales en différents modes.
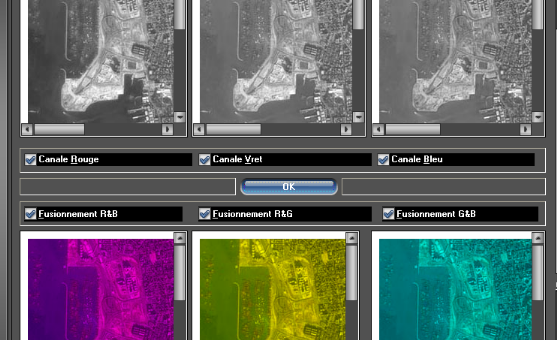 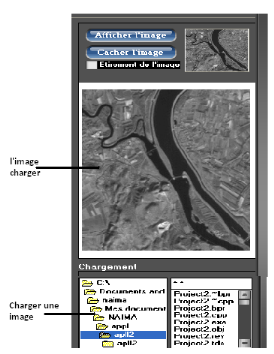
figure-02-chargement d'image à traité et
fusionnement des canaux
2-1-2- menu (2) : prétraitement.
- il permet de afficher les image en niveau de gris.
- trouver l'image négative.
- seuillage par un seul seuil ou deux seuils.
- filtrage des images par différents filtre passe-bas et
passe-haut.
- trouver les différents histogrammes (normale,
cumulé, égalisé, étiré).
- il permet d'enregistrer l'image traitée, et de quitter
l'application.
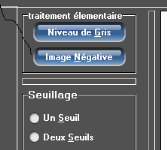  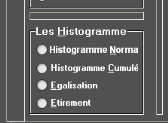
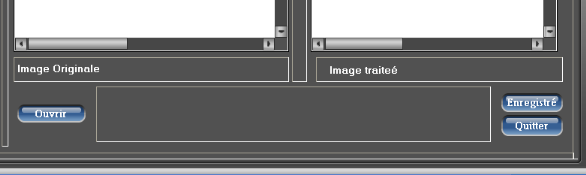
figure-03- prétraitement des images
satellitaires
2-1-3- menu (3) : Modélisation en
3D :
- permet de charger une image et la
modéliser en 3D par SDL et OpenGL.
- permet de déplacer le terrien vers différents
direction.
- permet de zoomer le terrien et le tourner.
- afficher le terrien en deux modes différents
(filaire et texture).
 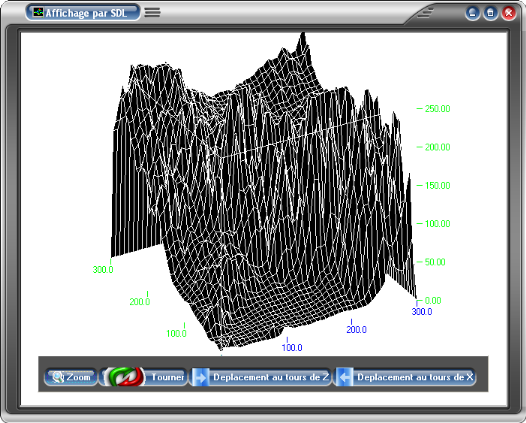
figure-04- affichage par SDL.
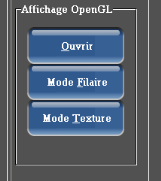 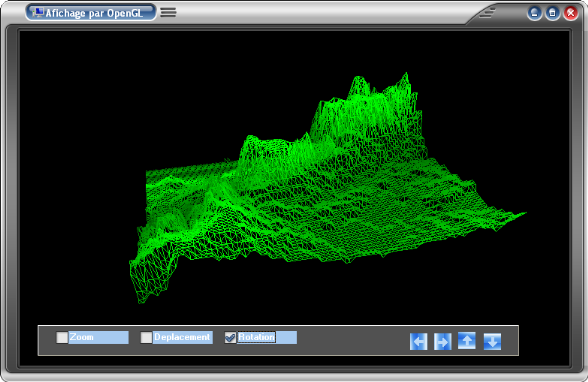
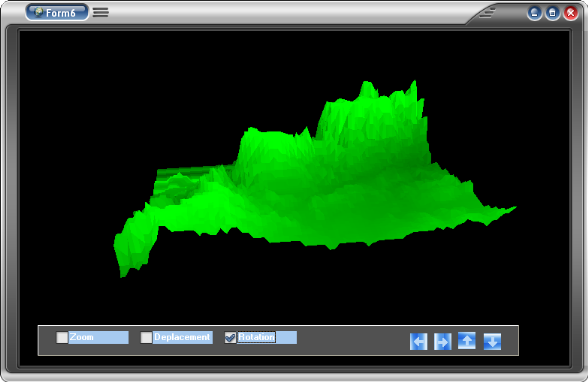
figure-05- affichage par OpenGL en mode filaire et
texture
2-1-4- menu (4) :détection de
contours :
- détection de contour par les operateurs
dérivateurs de premier et de deuxième ordre.
- détection de contours par la méthode de Canny et
Deriche.
- détection de contours par la méthode de seuillage
(Hystérésis).
figure-06- différents méthodes de
détection de contour
2-1-5- les modèles
déformable :
- la détection de contours par les modèles
déformables paramétrique `'Snake''.
- la détection de contours par les modèles
déformables géométriques.
figure-07-détection de contours par la
méthode des modèles déformables.
| 

