|
Synthèse et validation des équipements
et
des procédures de test sur les instruments de
bord des avions : Modèle B737 NG
Encadreur : MR. PARTICK ÇANA
M S A T R A A Y M E N
Synthèse Et Validation Des Equipements
Et Des Procédures De Test Sur Les Instruments
De Bord Des Avions : Modèle B737 NG
PROJET DE FIN D'ANNéE
2008 - 2009
Les droits des textes ont été
acquis par Cérès Productions pour
l?ensemble
de l?Afrique
ISBN 9977 - 27 - 366 - 7
(c) Edition Grasseset et
Fasquelle 2009
2009 - Cérès Editions
Cérès
CHAUSSEE D'ANTIN 53, rue de la Chaussée d'Antin 75009 PARIS
Dans la vie, il n?y a pas Le solutions. Il y a Les forces en
marche : il faut les créer, et les solutions suivent...
Antoine Le Saint - Exupéry
REMERCIEMENT
,fie tenais tout particulier à remercier MR. PARTICK
ÇANA pour son aide
tant sur le plan technique que sur le plan humain,
il m'a énormément aidé à
m'intégrer au
sein de l'équipe, et son soutien sur le plan technique m'a
permis de
mener à bien mon projet.
,fie suis reconnaissant à M. BENNAND L. de
s'être toujours soucié de ma compréhension des
problèmes abordés. Merci de m'avoir accordé votre
confiance, cela a rendu le projet d'autant plus intéressant.
Un grand merci à DRENTHE M. et CHIBANI A. pour leur
gentillesse, leur disponibilité et leur soutien. Merci d'avoir pris le
temps de répondre à mes nombreuses questions.
Enfin, j'aimerai remercier mes collègues des services
Moteur et Cellule, Avionique et Automatisme et CAO Top Solid qui m'ont si bien
accueillie et intégrée à l'entreprise.
Sommaire
Sommaire 6
Liste des figures 10
Introduction générale 13
Cahier des charges 15
Chapitre 1. Présentation des sociétés
16
1.1 Présentation d'AIR FRANCE
1.1.1 Histoire
1.1.2 Les chiffres
1.1.3 Stratégie
1.1.4 La flotte
1.1.5 Atouts et faiblesses
1.2 Présentation de BOEING
1.2.1 Histoire
1.2.2 Production d'avions civils 1.2.3 Performances
économiques 1.2.4 Performances techniques
Chapitre 2. Boeing 737 31
2.1 Introduction
2.2 Variantes
2.3 Caractéristiques
2.3.1 Ancienne génération de Boeing 737 2.3.2
Nouvelle génération de Boeing 737
2.4 Principaux accidents de Boeing 737
2.5 CFM International CFM56 : réacteur Boeing
737
Chapitre 3. Instruments de bord d'avion 40
3.1 Introduction
3.2 Tableau de bord d'un avion (Front panel)
3.2.1 Introduction
3.2.2 Compas magnétique
3.2.3 Instruments aérodynamiques
3.2.3.1 Altimètre
3.2.3.2 Anémomètre
3.2.4 Instruments gyroscopiques
3.2.4.1 Gyro compas / Gyro Directionnel
3.2.4.2 Horizon artificiel
3.2.4.3 Indicateur de virage et de dérapage
(bille-aiguille)
3.2.5 Instruments de radionavigation .
3.2.5.1 ADF (Automatic Direction Finder)
3.2.5.2 VOR (VHF Omnidirectional Range)
3.2.5.3 DME (Distance Measuring Equipment)
3.2.5.4 ILS (Instrument Landing System)
3.3 Appareil désigné pour la procédure
de test
3.3.1 Visualisation de l?information
3.3.2 Le VOR (VHF Omni Range) [1]
3.3.2.1 Définition
3.3.2.2 Principe du VOR
3.3.2.3 Equipement de bord.
3.3.3 ILS (Instrument Landing System)[1]
3.3.3.1 LOCALIZER
3.3.3.2 GLIDE PATH
3.4 Conclusion
Chapitre 4. Conception des différents module de test
du 7(I214 51
4.1 Introduction
4.2 Conception du système de contrôle et de
test du 7(I214
4.2.1 Structure générale
4.2.2 Module de commande et de contrôle 4.2.3 Module de
l?Emission
4.2.4 Module de la Réception
4.2.5 Module de commande de Baud 4.2.6 Module de
décodage du protocole 4.2.7 Module Gen_Erreur
4.2.8 Module de sélection de la commande 4.2.9 Module
de la validation de la réception 4.2.10 Interface Série
Asynchrone
4.2.10.1 Principe d'une liaison série asynchrone
4.2.10.2 La norme RS232 4.2.10.2.1
Caractéristique
4.2.10.2.2 Protocole de transmission
4.2.10.2.3 Port RS232
4.3 Choix du matériel
4.3.1 Microcontrôleurs 4.3.2 FPGA
4.4 La carte SPARTAN-3[3]
4.4.1 Développement d'une application sur
SPARTAN-3
4.5 VHDL [6]
4.5.1 Présentation
4.5.2 Unité de conception 4.5.3 Synthèse de
circuits
4.6 Interface graphique
4.6.1 Visual Basic [5]
4.7 Conclusion
Chapitre 5. Implémentation du code en VHDL et test de
l'instrument. 65
5.1 Introduction
5.2 Configuration de la carte SPARTAN-3
5.3 La communication entre PC et SPARTAN-3
5.3.1 Le module top
5.3.2 Module Gen_UART_Clk 5.3.3 Module baud_converter 5.3.4
Module d'Emission
5.3.5 Module de Réception
5.3.6 Simulation de Vérification
5.4 Interface graphique
5.4.1 Test de l'Emission et de la Réception
5.4.2 Vitesse de transmission 5.4.3 Réalisation du
VOR/ILS
5.5 Réalisation pratique du test du KI214
5.5.1 Etapes de test
5.6 Conclusion
Conclusion générale 80
Bibliographie 81
Annexe 82
Liste des figures
Figure 3-1 : Tableau de bord
d?avion. 41
Figure 3-2 : Indicateur compas
magnétique. 42
Figure 3-3 : Indicateur
Altimètre. 42
Figure 3-4 : Indicateur
Anémomètre 43
Figure 3-5 : Principe de
l?Anémomètre. 43
Figure 3-6 : Indicateur
Gyrocompas. 44
Figure 3-7 : Indicateur Horizon
artificiel. 44
Figure 3-8 : Indicateur de
virage. 45
Figure 3-9 : Indicateur ADF.
45
Figure 3-10 : Indicateur VOR
46
Figure 3-11 : Indicateur VOR/ILS
(ICI 214) 47
Figure 3-12 : Indicateur QDR
47
Figure 3-13 : Principe du VOR
48
Figure 3-14 : Schéma
Synoptique de l?équipement de bord. 48
Figure 3-15 : Exemple de
position du LOCALIZER 49
Figure 3-16 : Diagramme de
rayonnement. 49
Figure 3-17 : Diagramme de
rayonnement. 50
Figure 4-1 : Schéma
général. 52
Figure 4-2 : Structure
générale. 53
Figure 4-3 : Module de commande
et de contrôle. 53
Figure 4-4 : Module de
l'Emission. 54
Figure 4-5 : Module de la
Réception. 54
Figure 4-6 : Module de la
commande baud 55
Figure 4-7 : Module de
décodage du protocole. 55
Figure 4-8 : Forme de la trame
à décoder. 56
Figure 4-9 : Module de
génération de l'erreur. 56
Figure 4-10 : Module de
sélection de la commande. 56
Figure 4-11 : Module de la bonne
réception. 57
Figure 4-12 : Format d'une
donnée série. 58
Figure 4-13 : Connecteur type DB
9. 58
Figure 4-14 : L'architecture
générale du FPGA. 60
Figure 4-15: La carte SPARTAN-3.
61
Figure 4-16 : Etapes de
développement d'une application. 62
Figure 4-17 : Etapes de
synthèse d'un circuit avec VHDL 63
Figure 5-1 : Câblage des
diverses composantes. 66
Figure 5-2 : Module du TOP.
68
Figure 5-3 : Le module
Gen_UART_Clk. 68
Figure 5-4: Simulation du module
Gen_UART_Clk. 69
Figure 5-5: Module
Baud_converter 69
Figure 5-6 : Module d'Emission
70
Figure 5-7 : Simulation de
l'Emission. 71
Figure 5-8 : Module de
Réception. 71
Figure 5-9 : Simulation du
module de réception. 71
Figure 5-10 : Simulation du
module top. 72
Figure 5-11 : Interface
Emission-Réception. 72
Figure 5-12
Emission-Réception avec Variation du baud. 73
Figure 5-13 : Indicateur KI214.
74
Figure 5-14 : Liste des valeurs
de Bauds autorisées. 74
Figure 5-15 : Interface
graphique. 75
Figure 5-16 : Schéma du
câblage de la carte SPARTAN-3. 75
Figure 5-17 : PINs de
l?indicateur KI214. 76
Figure 5-18 : Connexion
SPARTAN-3/Indicateur KI214. 76
Figure 5-19 : Etat initial de
l?instrument KI214. 78
Figure 5-20 : Boutons de
commande de l?instrument 78
La seconde partie portera sur la conception d'une solution
adéquate à la procédure de
Introduction générale
Grâce aux progrès de l'aviation, l'avion prit
son essor en tant que moyen de transport civil. Disposant d'instruments de
navigation performants et de cabines pressurisées, les appareils
devinrent plus sûrs et plus confortables, la pressurisation leur
permettant de voler à très haute altitude, et parcourant de
très longues distances.
Les instruments de bords d'avion sont d'une impressionnante
complexité au niveau électronique, mécanique et
informatique, leurs contrôle et maintenance reposent principalement sur
des personnes qualifiées, ils assurent le bon fonctionnement de chaque
instrument pour faciliter la tâche du pilote en lui fournissant des
détails incontestables ce qui garantira un vol réussi et permet
de préserver la vie des passagers.
L'UNAT (Université National de
l'Aéronautique et des Technologies), leader dans le domaine de formation
des pilotes en Tunisie, s'est avérée consciente de l'importance
de ses procédures de maintenance vitales qui s'effectuent
régulièrement dans des dates fixées d'avance, et a eu la
volonté de mieux s'assurer, en premier lieu de la sécurité
de ses futurs pilotes et en second lieu de son parc avion en employant un moyen
permettant un test simple et régulier pouvant être effectué
avant chaque vol.
Soucieuse d'assurer une bonne formation pour ses
étudiants, l'IMA ne cesse de fournir les moyens matériels,
humains et d'ouvrir les portes de contact avec le tissu économique du
pays. En outre, les projets de fin d'année visent à donner aux
étudiants la possibilité, en utilisant les méthodes et les
moyens industriels, d'appliquer, de contrôler, de mettre au point et de
tester leurs capacités d'analyse et de synthèse.
La mise en parallèle des deux items
précédents a mené à mon projet de fin
d'année afin d'accomplir la conception et la réalisation d'une
procédure de test pour les instruments de bord d'avion au sein de
l'IMA.
Le présent rapport s'articulera sur trois parties : la
première concernera notre premier contact avec les avions
précisément avec leurs tableaux de bord et ses différents
composants ainsi que la description de l'instrument KI214 désigné
pour l'application de la procédure de test.
test et sur la description de ses différents
éléments pour garantir la communication entre l'instrument et
l'interface de commande.
La dernière partie dévoilera la
réalisation pratique effectuée. Elle comporte deux étapes
:
* Le code source écrit en VHDL qui traite la
procédure de communication entre
la carte d'acquisition et l'instrument sujet de notre
test
* L'interface graphique (Interface Homme Machine : IHM)
destinée à améliorer la manière dont l'utilisateur
commande et supervise le comportement de son instrument à travers son
ordinateur.
Cahier des charges
Cadre général
Synthèse et validation des équipements et des
procédures de test sur les instruments de bord des avions.
Objectifs à satisfaire
Réaliser une étude de faisabilité pour
développer une procédure de test des
instruments de bord des avions. Le choix du ou des
instruments se fera en fonction de délai fixé après
analyse du sujet.
Contraintes de réalisation
L'étude sera menée le plus loin possible en
fonction du délai imparti. Les résultats des
actions pratiques qui peuvent être menées sur le
terrain (mise en route d'équipements, test....) dépendent de
l'état du matériel et de la documentation disponible à
l'UNAT et peuvent influer sur la réalisation totale des
objectifs.
Une réévaluation des objectifs
précédemment cités peut être demandée par le
maître d'oeuvre en cour de projet et engendrera une révision du
présent cahier de charges. Cette clause est à définir lors
d'une réunion avec le maître d'ouvrage en cours
d'étude.
Chapitre 1.
Présentation des sociétés
Chapitre 1 : Présentation des
sociétés
1.1 Présentation d'AIR FRANCE
Air France (Compagnie nationale Air
France) est la première compagnie aérienne
française. Elle dessert les principaux aéroports
français, ainsi qu'un très grand nombre de destinations
étrangères et fait désormais partie, avec KLM du
groupe privatisé Air France-KLM. Elle
fait aussi partie de l'alliance dite SkyTeam et son hub principal
(plate-forme de correspondance) est situé sur l'aéroport
Paris-Charles-de-Gaulle avec lequel elle entretient de nombreux accords
d'exploitation. Air France possède la certification IOSA de
l'IATA.
Le nom "Air France" provient du rapprochement des mots
"air" et "France" qui mettent en avant le caractère aérien de la
compagnie. Trois activités principales (les classements sont ceux
du groupe Air France-KLM) :
· le transport de passagers : 1er groupe
européen avec 25,5 % de part de marché (novembre 2004) et
1er groupe mondial en termes de chiffre d'affaires.
· le transport de fret : 1er groupe mondial
pour le transport de fret international, hors intégrateurs,
3e avec (derrière Fedex et UPS).
· la maintenance et l'entretien des avions :
1er opérateur mondial multiproduits.
1.1.1 Histoire
HISTORIQUE
1933-1945
Air-France a été fondée le 31
août 1933 par la fusion de 4 compagnies principales du transport
aérien français : Air Orient, Air Union, la C.I.D.N.A. et les
lignes Farman, sous forme d'une société anonyme au capital de 120
millions de francs dans laquelle l'État détenait au moins 25 %
des actions et serait représenté au conseil d'administration dans
les mêmes proportions. Cette société racheta les actifs de
l'Aéropostale, à l'époque en liquidation judiciaire. Le 7
octobre 1933, une cérémonie au Bourget consacra la nouvelle
compagnie que présidait M. Roume, ancien président d'Air Orient,
et auparavant gouverneur général de l'Indochine et de l'Afrique
Occidentale Française. À l'origine, elle avait comme symbole un
hippocampe ailé affectueusement surnommée la crevette par les
personnels. Cet emblème était celui d'Air Orient.
1945-1960
Le 26 juin 1945 au lendemain de la Seconde Guerre mondiale,
l'Aviation civile française fut nationalisée et Air France
devient alors propriété de l'État. Le 1 er
juillet 1946, la liaison Paris-New York est officiellement inaugurée
avec un DC-4 en moins de 20 heures. Elle absorbe ses
filiales Air Bleu et Air France Transatlantique en 1948. En
1953, Air France se modernise, elle introduit le Lockheed Constellation
à sa flotte pour les vols transatlantiques. Au début des
années 60, Air France met en service les nouveaux avions à
réaction de l'époque, la Caravelle et le Boeing 707
réduisant ainsi les temps de vol.
1974-1999
En 1974, elle s'installe au nouvel aérogare de
Roissy, introduisant les avions gros porteurs à sa flotte soit l'Airbus
A300 et le Boeing 747. Le 21 janvier 1976, premier vol commercial du Concorde
entre Paris, Dakar et Rio de Janeiro. Le 12 janvier 1990, l'État
achète au groupe Chargeurs SA de Jérôme Seydoux la
quasi-totalité du capital de la compagnie privée UTA qui se
trouve de fait nationalisée. Les compagnies aériennes appartenant
au gouvernement français, c'est-à-dire Air France, Air Inter, Air
Charter et UTA sont réunies au sein du Groupe Air France mais conservent
provisoirement leur autonomie. Une nouvelle compagnie, Groupe Air France, est
créée par décret le 25 juillet 1994, qui entra en vigueur
le 1er septembre suivant. Cette société
détenait la majorité des parts du capital d'Air France et d'Air
Inter rebaptisée Air France Europe. Le 10 février 1999, Air
France fait l'objet d'une privatisation partielle.
2000-2009
En 2000, les avions et personnels de La
Société d'Exploitation Aéropostale (L'Aéropostale
ou SEA) créés en 1991 en partenariat avec le groupe La Poste,
sont également intégrés au Groupe Air France.
Le 22 juin 2000, Air France s'allie avec les compagnies
aériennes Delta Air Lines, Aeroméxico et Korean Air pour former
l'alliance SkyTeam.
Le groupe (Air France-KLM) qu'elle forme désormais
avec KLM depuis le 3 mai 2004 fait d'elle une société
privatisée même si l'État français détient
encore des parts importantes au sein du capital.
En 2009, elle devrait normalement recevoir son premier
Airbus A380.
LES INNOVATIONS D'AIR FRANCE
La compagnie revendique les innovations suivantes :
· Développement d'un réseau supersonique
par Concorde, en 1976, de Paris vers Dakar, Caracas, Mexico et Rio-de-Janeiro
puis New-York.
· Création de la classe "Affaires", en 1978,
qui se substitue à la Première classe sur les vols courts ou
moyen-courriers, et la complète sur les longs-courriers. Ce
modèle sera imité par la plupart des autres compagnies, sous les
vocables "classe Business" ou "classe club".
· Réalisation d'un service cadencé, la
Navette, dans les années 1990, entre Paris et quelques métropoles
françaises (Nice, Marseille, Toulouse et Bordeaux).
· Le futur lancement d'une Première classe de
"grand luxe" sur les vols longs-courriers, avec, au sol, des salons
privés exclusifs, à bord des fauteuils-couchettes et un service
plus dédié, changeant l'ancienne abréviation F pour First
en P pour Première. Le niveau de ces
prestations devrait être réhaussé avec
l'apparition très prochaine des Airbus A-380 à deux
ponts.
1.1.2 LES CHIFFRES GENERALITES
Au cours de l'année 2007-2008, Groupe Air
France-KLM:
· 579 avions en exploitation desservant 326
destinations dans le monde réparties dans 115 pays.
· 74,8 millions de passagers transportés
· 103 000 salariés dans le monde.
Air France compte:
· 389 avions en exploitation au 31 décembre 2007
(131 sont exploités par les filiales régionales) desservant 182
destinations dans 98 pays.
· 49,4 millions de passagers transportés sur les
vols commercialisés par la compagnie (exercice 2006).
· 74 354 salariés dans le monde.
· 1 800 vols quotidiens (dont 800 traités au Hub
de Roissy-CDG).
· La moyenne d'âge de ses appareils est de 9
ans.
· 4 500 PNT, 15 700 PNC.
DONNEES FINANCIERES
Données financières
|
Années
|
2005-2006
publié (2)
|
2006-2007
publié (2)
|
2007-2008
publié (2)
|
Variation
|
Chiffre d'affaires
|
21 450 M€
|
23 070 M€
|
25 800 M€
|
+11,8%
|
· Passagers
|
16 260 M€
|
17 340 M€
|
21 004 M€
|
+21,1%
|
· Cargo
|
1 412 M€
|
2 908 M€
|
3 200 M€
|
+9,4 %
|
· Maintenance
|
508 M€
|
977 M€
|
1 270 M€
|
+4,0 %
|
· Autres
|
157 M€
|
714 M€
|
805 M€
|
+12,7 %
|
EBITDAR (3)
|
1 776 M€
|
2 716 M€
|
2 873 M€
|
+5,8 %
|
|
Résultat d'exploitation avant cessions
aéronautiques
|
132 M€
|
405 M€
|
489 M€
|
+20,7 %
|
Marge d'exploitation
|
1,1 %
|
2,3 %
|
2,6 %
|
|
Résultat net part groupe
|
913 M€
|
1 067 M€
|
1 401 M€
|
+20,2 %
|
Résultat net par action
|
0,42 €
|
3,35 €
|
3,37 €
|
+20,4 %
|
Dividende par action
|
0,30 €
|
0,48 €
|
0,58 €
|
0,10 €
|
Taux d'endettement
|
0,62 %
|
1,21 %
|
1,06 %
|
|
|
· (2) Consolidation d'Air France sur 12 mois
(avril-mars) et de KLM sur 11 mois (mai-mars)
· (3) Excédent brut d'exploitation avant loyers
opérationnels
LE CAPITAL
Le capital de la société Air France est
détenu à 100 % par Air France-KLM. Au 30
septembre 2007, le capital d'Air France-KLM est
composé de 300 219 278 actions se répartissant ainsi :
· État français : 16,0%
· Salariés du groupe : 12,0%,
· Flottant estimé : 70,0%
· Autocontrôle : 0,6%
Répartition du capital par nationalité (au 15
juillet 2007) :
· France : 57,0%
· États-Unis : 24,0%
· Royaume-Uni : 14,0%
· Belgique : 3,0%
· Pays-Bas : 2,0%
· Luxembourg : 2,0%
· Non-identifiés : 5,2%
· Autres : 2,6%
DONNEES BOURSIERES
· Actions cotées sur la bourse de Paris
(Euronext Paris) depuis le 22 février 1999, sur Euronext Amsterdam et le
New York Stock Exchange (NYSE) depuis le 5 mai 2004.
· Fiche signalétique boursière:
o Membre des indices de cotation: CAC 40, Euronext 100, DJ
Eurostoxx, AMX
o Indices de développement durable : DJSI World, DJSI
Stoxx, ASPI Eurozone, FTSE 4 Good
o Membre de l'indice IAS (Indice de l'actionnariat
salarié en France)
o Code ISIN de l'action AF-KLM = FR0000031122 (Euronext
Paris et Amsterdam)
o Code ISIN du warrant BASA = FR0010068965 (Euronext Paris
et Amsterdam)
o Code ISIN de l'obligation OCEANE = FR0010185975 (Euronext
Paris): 450 M€ le 14 avril 2005
o Code Reuters = AIRF.PA (Euronext Paris), AIRF.AS (Euronext
Amsterdam)
o Code SICOVAM / Euroclear = 3112 (Euronext Paris)
o Valeur nominale = euro
o Code NYSE = AKH et AKH WS
1.1.3 STRATEGIE
Air France se veut un groupe conquérant, qui
intègre d'autres compagnies et gagne des parts de marché.
L'alliance Skyteam
Air France est membre fondateur de
l'alliance SkyTeam - nom à la consonance discutée pour un groupe
français - avec Delta Air Lines, Aeromexico et Korean Air depuis l'an
2000.
LE RACHAT DE KLM
Le rapprochement Air France-KLM a abouti à la
création du premier groupe européen de transport aérien.
La réussite de l'offre publique d'échange sur KLM permet au
nouveau groupe, fondé sur le concept un groupe, deux compagnies, trois
métiers, d'engager rapidement sa stratégie. Trois niveaux de
priorités ont été dégagés :
· la poursuite de la maîtrise des coûts
pour chaque compagnie,
· la mise en oeuvre des synergies,
· le développement de l'alliance SkyTeam avec
l'entrée simultanée de KLM, Northwest Airlines et Continental
Airlines (initialement partenaires de KLM)
Fin novembre 2004, Jean-Cyril Spinetta, PDG du groupe, et
Leo Van Wijk, vice-président du groupe et PDG de KLM, ont
présenté des bénéfices semestriels (de mai à
septembre, la fusion n'ayant été concrétisée
qu'à partir de cette date) de 296 millions d'euros soit une hausse de
56,6 % par rapport au précédent exercice. Les programmes de
fidélisation d'Air France (Fréquence Plus) et de KLM (Flying
Dutchman) furent fusionnés en un programme unique, baptisé Flying
Blue à compter du 6 juin 2005.
LE RAPPROCHEMENT AVEC ALITALIA
Cette tentative fait l'objet d'un feuilleton à
rebondissements.
À la suite d'un séminaire gouvernemental
franco-italien, la relance du processus d'alliance entre le groupe Air France
et Alitalia a été confirmée. « Alitalia a ses
problèmes à résoudre et nous les
résoudrons », a déclaré Silvio
Berlusconi, et ensuite on se dirigera vers l'intégration pour
créer une unique compagnie franco-italienne, ce qui a été
confirmé par Jean-Pierre Raffarin. Dès cette annonce, les actions
d'Alitalia se sont envolées. L'administrateur
délégué, Giancarlo Cimoli a confirmé ces propos en
marge du sommet: « une fois que la société aura une
situation plus positive d'un point de vue comptable, elle vaudra davantage et
elle soutiendra l'alliance avec KLM et Air France ».
Alitalia et Air France sont déjà liées
par un accord commercial depuis 2001 ; accord renforcé par un
échange d'actions en 2003 portant sur 2 % du capital et la
présence des deux présidents dans les conseils d'administration
respectifs. Mais la fusion fut reportée tandis que celle avec KLM se
réalisa en septembre 2004. Cet accord commercial prévoit
notamment de développer un faisceau de correspondances, axé sur
les aéroports de Roissy-Charles-de-Gaulle, Milan Malpensa, Rome
Fiumicino et le développement du partage de code pour l'Europe et les
vols intercontinentaux.
Pour les liaisons entre l'Italie et la France, les
compagnies opèrent en co-entreprise (comme une seule compagnie) Il y a
actuellement 582 vols hebdomadaires dont 30,6 % seulement sont assurés
par Alitalia, ce qui fait réagir Giancarlo Cimoli lequel a
récemment souhaité que ce partage soit mieux
équilibré.
En novembre 2005, Air France a annoncé qu'elle
souscrivait à l'augmentation de capital d'Alitalia pour décembre
2005 de façon à posséder toujours 2 % du capital à
l'issue de la transaction.
En juin 2006, Jean-Cyril Spinetta a déclaré
que le but ultime du partenariat avec Alitalia était la fusion, ce qui
aboutirait à une primatie européenne incontestée, avec une
flotte globale de plus de 650 avions (en prenant en compte les filiales
régionales)
Fin 2007, la fusion avec Alitalia semblait désormais
acquise et avait été officialisée le dimanche 16 mars
2008. La compagnie italienne avait fini par accepter les conditions pourtant
strictes du rachat par le groupe Air France KLM. Les conditions étaient
les suivantes : Une action d'Air France s'échangera contre 160 actions
d'Alitalia, ce qui fait passer la valeur d'Alitalia à 140 millions
d'euros. - Les syndicats doivent donner leur feu vert. - 1 600 postes devront
être supprimés pour permettre des économies dans la branche
transport aérien. - Alitalia doit obtenir une ligne de crédit
pour lui permettre de subvenir à ses besoins jusqu'à
l'augmentation de capital. - Les activités de la plate-forme de
correspondance de Milan-Malpensa devront être réduites au profit
de celle de Rome. - Les négociations pourront se solder par un
échec au cas où le groupe franco-néerlandais jugerait les
conditions de la Commission européenne trop strictes.
L'élection de Silvio Berlusconi, qui durant sa
campagne avait annoncé vouloir garder une compagnie nationale italienne,
semblait compromettre l'intégration d'Alitalia dans le groupe Air
France-KLM mais les réalités économiques pourraient
pensait-on finalement l'autoriser, à des conditions acceptables par
tous.
Toujours est-il que le 21 avril 2008 Air France, constatant
un blocage total dans les négociations menées avec les
partenaires sociaux Italiens, annonçait retirer son offre de rachat de
la compagnie Alitalia. En novembre 2008, le plan privilégié par
Silvio Berlusconi d'une "Solution Italienne" semblait se confirmer, avec la
cession des actifs d'Alitalia à la CAI (Compagnia aerea italiana),
le
"partenaire industriel de référence"
associé à ce plan semblant devoir être à nouveau Air
France qui racheterait entre 20 et 25 % des actions de la nouvelle compagnie.
D'autres grandes compagnies aériennes Européennes (Lufthansa,
British Airways) avaient également témoigné (en vain) leur
intérêt pour une association avec la "nouvelle Alitalia".
Le 2 janvier 2009, la presse italienne annonce qu'Air France
a décidé d'acheter (la signature du contrat devrait se faire le
10 janvier), 25 % des parts de la nouvelle société (Compagnie
aérienne italienne) qui reprend le nom d'Alitalia depuis le 30
décembre 2008, soit un total de 300 millions d'euros, en y prenant trois
membres du futur conseil d'administration et en désignant deux membres
du comité exécutif. Air France devient ainsi le principal
actionnaire d'Alitalia.
L'ATOUT
Il est généralement considéré
qu'un des atouts essentiels d'Air France est son implantation à
l'aéroport Roissy-Charles de Gaulle (son principal épi) qui
présente l'avantage de posséder un fort potentiel d'extension (il
est entouré de zones rurales). Sa superficie est actuellement de 3 200
hectares, soit environ 3 fois plus que la plupart des grands aéroports
européens. Air France concentre son épi (Hub) sur le terminal 2
de l'aéroport Roissy-Charles de Gaulle. Depuis l'ouverture du Satellite
S3 en 2007, puis par l'ouverture du Satellite S4 en 2012, Air France abandonne
progressivement la première partie du terminal, c'est-à-dire les
terminaux 2A, 2B, 2C et 2D pour se concentrer sur les 2E, 2F, 2G
(aérogare régionale), S3, et S4 qui lui offriront une
capacité annuelle de 40 millions de passagers. Cela poussera Roissy
à avoir une capacité totale d'environ 72 millions de passagers.
L'ultime projet est le T4, projet de terminal au Nord pour accueillir 30
millions de passagers. Par contre, l'aéroport Roissy-Charles de Gaulle
étant classé par les passagers parmi les pires aéroports
en matière de services offerts (signalisation insuffisante et
compliquée, manque de confort, longues attentes pour le passage aux
filtres de police et de sureté, complication des circuits de
correspondances qui aboutissent à des vols manqués, indigence des
zones de commerce pour certains terminaux, forts délais de livraison des
bagages, conception des terminaux etc..), en raison que sa desserte ne se situe
pas dans les normes internationaux. Cette localisation risque en fait de
devenir un handicap.
1.1.4 LA FLOTTE
Flotte détaillée d'Air
France
POLITIQUE DE FLOTTE
Au 31 juillet 2007, Air France exploite 380 avions qu'elle
répartit sur ses flottes long-courrier, moyen-courrier et
régionales.
Une politique de flotte que la compagnie considère
comme efficace permet de rationaliser et de moderniser la flotte avec les
avantages qui y sont liés :
· réduction de la consommation,
· réduction des coûts,
· réduction des nuisances.
Près des trois quarts du plan d'investissements des
5 prochaines années seront consacrés à cette
rationalisation et modernisation. Il s'agit notamment de limiter le nombre de
modèles d'avions utilisés, dans un souci de rentabilité et
de plus grande souplesse de programmation.
LONG-COURRIER
Le succès de la plate-forme de correspondance de
l'aéroport Roissy-Charles de Gaulle 2 et les perspectives de
développement qui l'accompagnent, orientent les choix de la compagnie
vers des appareils long-courriers à très long rayon d'action. La
flotte long courrier d'Air France a un âge moyen de 6,6
ans (hors avions cargo). Pendant longtemps, elle exploita nombre de Boeing 747
dont elle remplace actuellement les anciens modèles par des Boeing 777
(exemple des 777-300ER pour le réseau Caraïbes Océan Indien
COI) et dans l'avenir, par des Airbus A380 qui relieront New York,
Montréal et Tokyo.
La compagnie française est l'un des rares exploitants
à détenir à la fois des Airbus A330-200, A340-300X et des
Boeing 777-200ER, les premiers étant utilisés avec les 747 sur
les destinations touristiques tandis que les seconds sont consacrés aux
liaisons à clientèle affaires. Cette spécialisation s'est
accrue lors des réaménagements avec les nouvelles cabines,
aménagées en 2003, pour les A330/340 et 747, en version
bi-classes.
Air France est le principal client de lancement du Boeing
777-300ER, mis en service en mai 2004 et initialement commandé pour
remplacer les Boeing 747-400.
Les derniers 747-200 et 747-300 exploités sur le
réseau Caraïbes-Océan Indien ont ainsi été
remplacés par des 777-300ER (50) à haute densité (472
sièges), dont le premier vol sur ces lignes a été
effectué le 12 juin 2006 en direction de la Guadeloupe à
l'aéroport du Raizet à Pointe-à-Pitre. Le
déploiement s'est ensuite effectué sur la Réunion depuis
le 24 janvier 2007. Le dernier appareil destiné à l'outre-mer a
été livré en juin 2007 et dessert la Guyane
française.
Les Airbus A330-200 (16) ont remplacé les A310 et
767-300ER sur les destinations long-courrier à moindre trafic et sur les
ouvertures de ligne à partir de décembre 2001. La version
exploitée par Air France (MTOW 233,010 tonnes) est dotée d'un
rayon d'action accru permettant de rejoindre la côte Ouest des
États-Unis.
MOYEN-COURRIER
Pour les vols moyen-courriers, Air France privilégie
tout de même Airbus avec ses nombreux appareils de la famille A320 dont
elle est la seule compagnie aérienne au monde à posséder
toutes les variantes: A318 (18), A319 (46), A320 (68) et A321 (15). Les Boeing
737 ont disparu de la flotte d'Air France au profit des
modèles d'Airbus le 11 juin 2007 avec le dernier vol d'un Boeing 737
immatriculé F-GJND entre Paris Charles de Gaulle et Turin.
CARGO
Air France a pris livraison de son premier Boeing 747-200F
en octobre 1974 (immatriculé N 18815 puis F-BPVO le 20/04/82),
baptisé "Super-Pélican" en référence au 707-328C
"Pélican". Suivront sept autres machines (F-BPVR, VV, F-GCBE, BG puis
BK, BL et BM à MTOW
accrue). L'intégration d'UTA apportera deux
appareils supplémentaires (F-GBOX et F-GPAN, détruit par le feu
à Madras en mars 1999).
Air France fut à nouveau le client de lancement d'une
version fret du Jumbo Jet en commandant des 747-428ERF en mars 2001 afin de
remplacer ses -228F vieillissants. Cette version à rayon d'action
amélioré permis notamment de supprimer l'escale technique de
Tachkent sur les lignes vers l'Asie du Sud-Est.
Air France Cargo a pris livraison de son premier Boeing
777-200LRF en 2009, version qu'elle est la première compagnie à
exploiter. Parallèlement, plusieurs Boeing 747-400 en version passagers
sont et seront convertis en version fret (B747-400BCF).
COMMANDES PASSEES
· Le 22 février 2005 Air France a passé
commande de 4 Boeing 777-300ER, en plus des 10 déjà
commandés auparavant et des 6 appareils pris en leasing aupres d'ILFC
(dont 4 déjà livrés).
· Air France a commandé 10 Airbus A380, avec
option pour 4 appareils supplémentaires ce qui en fera la
première compagnie européenne à utiliser cet avion
dès avril 2009. Initialement prévue pour le second semestre 2007,
la mise en ligne devrait avoir lieu le 1er avril 2009, soit avec deux ans de
retard. Une première livraison de 3 appareils devait initialement se
faire au printemps 2007 et 6 suivraient dans les 2 années à
venir. Les Airbus A380 d?Air France seront d'abord utilisés pour les
trajets de l'Atlantique Nord, comme Paris-Montréal (la liaison
Paris-Montréal servira uniquement pour la formation de
l'équipage) ou Paris-New York. Ensuite, l'avion assurera aussi des
liaisons vers Pékin et Tôkyô.
· Le 24 mai 2007, la compagnie officialise la
conversion de 2 de ses 4 options pour l'Airbus A380 en commande fermes en tant
que partie du plan de compensation des retards de livraison de l'appareil. Air
France a également commandé 30 Airbus A320 pour remplaçer
ses modèles les plus anciens et élargir sa flotte. Enfin, 18
Boeing 777 (dont 5 versions fret) sont aussi commandés en vue du
remplacement des Boeing 747-400.
· Le 18 juin 2007, la compagnie officialise la commande
de 2 A380 supplémentaires et de 18 avions de la famille des A32X, lors
du Salon du Bourget 2007.
MAINTENANCE
L'activité maintenance est commercialisée sous
la marque Air France Industries. 1.1.5 ATOUTS ET
FAIBLESSES
ATOUTS
· L'élégance des hôtesses,
habillées par des grands couturiers parisiens, l'excellence des mets et
des vins (pour la tarification supérieure) ajoutées à la
qualité de la flotte, faisaient partie de l'image de marque reconnue de
la compagnie, laquelle n'est plus considérée dans
les premières au monde sur ces critères
puisqu'au dernier classement Skytrax World Airline Awards (2007) elle n'a que 4
étoiles derrière six autres compagnies qui elles obtiennent les 5
étoiles.
FAIBLESSES
· Air France a été déclarée
par l'Association of European Airlines l'une des sept pires compagnies pour la
perte de bagages en 2006, la moyenne sur 24 compagnies étant de 15,7
bagages égarés pour 1 000 passagers.
INCIDENTS ET ACCIDENTS
La compagnie a connu 157 incidents et accidents (hors Air
Inter) depuis 1946, soit seulement 2 et demi par an.
Voici les plus marquants:
· Vol Air France - Entre Copenhague et Paris - 3
septembre 1946 - 22 morts, Douglas C-53D-DO (DC-3), F-BAOB
· Vol Air France - Entre Paris et Londres - 4
septembre 1946 - 20 morts dont 1 au sol, 7 rescapés, Douglas DC-3D,
F-BAXD
· Vol Air France - Entre Bordeaux et Lisbonne - 1er
février 1946 - 15 morts, 1 rescapé, Douglas DC-3C, F-BAXQ
· Vol Air France - Entre Lyon et Nice (crash de
Château-Bernard) - 14 mars 1947 - 23 morts, Douglas DC-3C, F-BAXO
· Vol Air France - Entre Bruxelles et Paris - 6
janvier 1948 - 16 morts, Douglas DC-3D, F-BAXC
· Vol Air France - Entre Fort-de-France et
Port-Étienne - 1er août 1948 - Latécoère 631 - 52
morts, F-BDRC
· Vol Air France - Entre Paris New-York via Les
Açores (Marcel Cerdan) - 28 octobre 1949 - 48 morts, Lockheed L-749
Constellation, F-BAZN
· Visite d'entretien - Ateliers Air France Orly
Nord, (incendie) - 22 janvier 1950 - pas de victime, Douglas DC4,
F-BBDB
· Vol Air France - Entre Saïgon et Paris via
Bahreïn - 12 juin 1950 - Douglas DC4, 46 morts, 6 rescapés
F-BBDE
· Vol Air France - Entre Saïgon et Paris via
Bahreïn - 14 juin 1950 - Douglas DC4, 40 morts, 13 rescapés,
F-BBDM
· Vol Air France - Entre Douala et Niamey (Mont
Cameroun) - 3 février 1951 - Douglas DC4, 29 morts, F-BBDO
· Vol Air France - Entre Nice et Paris - 3 mars 1952
- SE.161, 38 morts, F-BCUM
· Vol Air France - Entre Paris et Saïgon via
Nice - 1er septembre 1953 - Lockheed L-749 Constellation, 42morts,
F-BAZZ
· Vol Air France - Entre Biskra et ??? - 8 avril
1957 - Douglas C47, 34 morts, F-BEIK
· Vol Air France - Entre Alger et
Colomb-Béchar - ((Date|31|mai|1958)) - Douglas C47, 15 morts,
F-BHKV
· Vol 343 Air France - Entre Paris et Dakar - 29
août 1960 - Lockheed L-1049G Super Constellation, 63 morts,
F-BHBC
· Vol 406 Air France - Entre Brazzaville et Paris
(Edjelé) - 10 mai 1961 - Lockheed L-1649A Starliner, 78 morts,
F-BHBM
· Vol 2005 Air France - Entre Paris et Rabat - 12
septembre 1961 - SE-210 Caravelle III, 77 morts, F-BJTB
· Vol 159 Air France - Entre Paris et New-York - 3 juin
1962 - Boeing 707-328, 130 morts, 2 rescapés, F-BHSM
· Vol 117 Air France - Entre Paris et Santiago du Chili
via Pointe-à-Pitre - 22 juin 1962 - Boeing 707-328, 113 morts,
F-BHST
· Vol 212 Air France- Entre Santiago du Chili et Paris
via Pointe-à-Pitre - 5 mars 1968 - Boeing 707-328C, 63 morts,
F-BLCJ
· Vol 1611 Air France - Entre Ajaccio et Nice - 11
septembre 1968 - SE-210 Caravelle III, 95 morts, F-BOHB
· Vol 212 Air France - Entre Santiago du Chili et Paris
via Pointe-à-Pitre (Caracas) - 4 décembre 1969 - Boeing 707-328B,
62 morts, F-BHSZ
· Vol 696 Air France - Lyon - Clermont-Ferrand - 27
octobre 1972 - Vickers 724 F-BMCH - 60 morts (pavillon Air Inter)
· Vol 296 Air France - Mulhouse (meeting aérien
d'Habsheim) - 26 juin 1988 - Airbus A320-111, 3 morts, 133 rescapés,
F-GFKC (pavillon Air Charter)
· Vol 72 Air France - Entre Paris et Papeete via Los
Angeles - 12 septembre 1993 - Boeing 747-428, pas de mort, 272 recapés,
F-GITA. Réparations effectuées sur place, remis en service
PPT-LAX 05/01/94
· Vol 8969 Air France - Entre Alger et Paris pris en
otage le 24 décembre 1994, 3 morts dont 1 au sol, 63 recapés,
détourné à Marseille le 26 décembre 1994, Airbus
A300B2-1C, 4 morts (les 4 terroristes), 105 rescapés, F-GBEC
· Vol 422 TAME - Entre l'Europe (toutes compagnies) et
Quito via Bogota (dernier tronçon assuré par la compagnie
équatorienne) - 20 avril 1998 - Boeing 727-230, 53 morts, HC-BSU
· Vol 6745 Air France - Entre Paris et Chennai
(exMadras) - 5 mars 1999 - Boeing 747-2B3F (Cargo), pas de mort, 5
rescapés, F-GPAN
· Vol 4590 Air France - Entre Paris et New-York
(Gonesse) - 25 juillet 2000 - Concorde 101 (ayant roulé sur une
pièce perdue d'un Douglas DC-10-30), 113 morts dont 4 au sol,
F-BTSC
· Vol 358 Air France - Entre Paris et Toronto - 2
août 2005 - Airbus A340-313X, pas de mort, 309 rescapés,
F-GLZQ
· Vol 7775 Air France Entre Pau et Paris
effectué par Régional - 25 janvier 2007 Fokker 28-100, 1 mort au
sol, F-GMPG
· Vol 346 Air France - Montreal (Canada) - 26
août 2008 - B 747 F-GITC
· Vol 447 Air France - Entre Rio de Janeiro et Paris -
1er juin 2009 Airbus A330-203, 228 morts, F-GZCP Nouveau
numéro: AF 445.
Les écrasements d'avions des compagnies UTA et KLM ne
sont pas mentionnés.
1.2 Présentation de BOEING
Boeing (nom officiel en anglais
The Boeing Company) est l'un des plus grands constructeurs aéronautiques
et de l'aérospatiale au monde. Son siège est situé
à Chicago, dans l'Illinois. Sa plus grande usine serait situé
soit à Wichita au Kansas ou autrement à Everett près de
Seattle, dans l'État de Washington. La firme fabrique des avions civils,
et aussi des avions militaires, des hélicoptères ainsi que des
satellites et des fusées avec sa division Boeing Integrated Defense
Systems qui représente 56% de ses revenus en 2005.
1.2.1 Histoire
Avant les années 1950
La compagnie est formée le 15 juillet 1916 par
William E. Boeing et George Conrad Westervelt. Elle est alors nommée
« B&W » d'après les initiales de ses deux fondateurs. Peu
après, son nom changea en « Pacific Aero Products », et une
année plus tard, elle est rebaptisée « Boeing Airplane
Company ».
En 1917, avec l'entrée en guerre des
États-Unis, la Navy commanda 50 hydravions d'entraînement Model C,
la première commande de Boeing. En 1923 Boeing fabriqua un avion de
transport postal le Model 40A et en 1927 elle remporta un contrat pour assurer
la liaison aéropostale San Francisco-Chicago.
Boeing créa alors « Boeing Air Transport »
pour s'occuper de ses activités de transports aériens. Pendant la
première année, près de 2 000 passagers furent
transportés et on entreprit alors de créer des avions
spécialement étudiés pour le transport des passagers,
c'est ainsi que le Model 80 fut lancé. Dans les années qui
suivirent, Boeing se mit à acquérir de nombreuses entreprises de
fabrication d'avions, de moteurs, des compagnies aériennes et en 1929,
Boeing changea son nom en United Aircraft and Transport Corporation.
En 1934, Boeing est devenu une grande entreprise fabriquant
des avions, des moteurs, transportant le courrier postal, s'occupant des
aéroports et assurant de nombreuses lignes aériennes. Mais, sous
la pression d'une loi anti-trust interdisant aux constructeurs d'exploiter des
lignes aériennes, ses créateurs vendent leurs participations et
« United Aircraft and Transport » est scindée en trois
entités :
? United Airlines responsable du transport
aérien
? United Aircraft responsable de la fabrication dans l'Est
du pays
? Boeing Airplane Company responsable de la fabrication dans
l'Ouest du pays.
Peu après, un accord avec la compagnie
aérienne Pan American World Airways fut signé, pour
développer et produire un hydravion commercial capable de transporter
des passagers sur les routes transatlantiques. Le Boeing 314 Clipper fit son
premier vol en juin 1938. C'était le plus gros avion civil de son temps,
il pouvait transporter 90 passagers sur les vols de jour et 40 passagers sur
les vols de nuit. Un an après, la première ligne commerciale des
États-Unis au
Royaume-Uni fut inaugurée. D'autres routes
aériennes furent ouvertes qui exploitaient le Boeing 314.
En 1938, Boeing mit en service le 307 Stratoliner ;
c'était le premier avion de transport à cabine pressurisée
; il était capable de voler à une altitude de croisière de
20 000 pieds, donc au dessus de la plupart des perturbations
météorologiques.
Pendant la Seconde Guerre Mondiale, Boeing construisit un
grand nombre de bombardiers. Beaucoup de travailleurs étaient des femmes
dont les maris étaient partis à la guerre.
Constitution du leader mondial dans la
défense
En réponse au mouvement de concentration dans
l'industrie de la défense américaine engagé par son
concurrent Lockheed en 1995, Boeing acquiert en août 1996 les
activités spatiales et de défense de Rockwell International pour
3.2 milliards de dollars. Rockwell était notamment le fabricant des 7
navettes spatiales américaines (Enterprise, Pathfinder, Columbia,
Atlantis, Endeavour, Discovery et Challenger).
Puis, Boeing rachète le numéro 2 du
matériel de défense derrière Lockheed Martin,
c'est-à-dire McDonnell Douglas, pour 13 milliards de dollars en
août 1997. McDonnell Douglas était notamment le fabricant des
lanceurs Delta.
Boeing est en 2008 le leader mondial dans le secteur de la
défense.
1.2.2 Production d'avions civils Anciennement
produit
· 314 "Clipper"
· 307 "Stratoliner"
· 377 "Stratocruiser"
· 717 (nom d'origine MD95 modifié après
rachat de MDouglas par Boeing)
· 707 (version raccourcie sous le nom de 720)
· 727
· 737 (1re et 2e
génération)
· 757
En production
· 737 NG (3e génération)
· 747-400
· 767
· 777
· 787
· Boeing Business Jet (version jet privé du 737
NG)
· Boeing-Bell V-22 Osprey
1.2.3 Performances économiques
1999-2005
· En 1999, l'avionneur Boeing a vendu 620 appareils ;
en 2004, les livraisons ont baissé pour atteindre 285 avions. Il est
désormais dépassé par son concurrent européen
Airbus en commandes depuis 2002 et en livraisons depuis 2004 (Source : Le
Monde, 13 juin 2005). En 2005 dans un marché record, la firme annonce 1
005 commandes (dont 569 B737, 235 B787 et 154 B777) dépassée de
nouveau par Airbus d'une cinquantaine d'appareils.
Fin 2005 :
· Le carnet de commande comprend 1809 avions livrables
pour les 7 prochaines années
o Livraisons 2005 : 290 avions - 320 prévus non
livrés à cause d'une grève d'un mois qui a bloqué
les principales usines américaines de production et d'assemblage en
décembre. Ces trente avions ont été repoussés sur
2006 et 2007 en plus des livraisons déjà estimées.
o Livraisons prévues 2006 : 395 avions
o Livraisons prévues 2007 : 445 avions
· Chiffres d'affaires :
o CA 2005 : 55 milliards US$ (45,8 milliards €)
o CA estimé 2006 : 60 milliards 7JS$ (50 milliards
€)
o CA estimé 2007 : 64 milliards 7JS$ (53,3 milliards
€)
· Bénéfice net 2005 : 2,60 milliards 7JS$
(2,16 milliards €)
Le nouveau B 787 est un succès commercial, il
revendique fin 2005, 291 commandes fermes et 88 intentions d'achats de 27
compagnies. Sa production doit débuter mi-2007 pour une entrée en
service prévue courant 2008. Si son succès se confirme, certains
analystes prévoient des ruptures d'approvisionnement de certains
fournisseurs et des problèmes de cadences dans la production, comme
Boeing en a déjà connus en 1997.
Boeing emploie plus de 245 000 employés aux
États-Unis et leur salaire tourne autour de 45 000$/Année et peut
aller jusqu'à 67$/ Heure (soit 127 000$/ année)
2006
Boeing est redevenu le premier avionneur mondial en 2006
avec 1 044 commandes contre 824 pour Airbus.
1.2.4 Performances techniques
· Le 10 novembre 2005, le Boeing 777-200 LR Worldliner,
a établi un nouveau record de vol commercial sans escale entre Hong Kong
et Londres par l'Océan Pacifique, soit 20 100 km.
CHAPITRe 2.
BOEING 737
Chapitre 2. BOEING 737
2.1 Introduction
Le Boeing 737 est un avion de ligne
construit par la société Boeing (É.-U.) depuis 1965. Le B
737 est un avion court ou moyen-courrier. Il s'agit d'un bi-réacteur
(deux moteurs, un sous chaque aile). Il effectua son premier vol le 9 avril
1967.
C'est, en 2004, l'avion de ligne le plus vendu au monde,
avec un total de plus de 1 200 Boeing 737 de troisième
génération vendus dans le monde entier, et plus de 6 000 au
total.
2.2 Variantes
Il existe 9 modèles du 737 répartis en trois
générations. Les modèles originaux sont les 737-100 et
200. Les classiques sont le 737-300, le 737-400 et le 737-500. Enfin la
Nouvelle Génération comporte le 737-600, le 737-700, le 737-800
et le 737-900.
737-100
Première génération, motorisée
par des réacteurs Pratt & Whitney XT8D (1 144 ont été
produits). L'avion partage 60% de sa cellule avec le Boeing 727, y compris les
moteurs de même type (3 sur le B 727); tout ceci dans le but de limiter
les coûts de recherche et de production. Il a été
lancé par la compagnie Lufthansa en 1964 et entra en service en 1968. Un
total de 30 appareils a été construit et livré.
737-200
Cette version est une extension du 737-100 ciblant le
marché des USA. United Airlines en est le premier acquéreur. Il
est lancé en 1965 et entre en service en 1968. Il est ensuite mis
à jour en tant que 737-200 Advanced qui devient la
version standard de production.
737-300, 400 et 500
Deuxième génération « classique
» (conception début des années 1980) équipée
de réacteurs CFM56-3 plus modernes et plus économiques (1 990
exemplaires ont été produits)
737-600, 700, 800 et 900
Nouvelle génération (737NG)
équipée de réacteurs CFM56-7B et d'un cockpit ultramoderne
entièrement numérique. Déjà plus de 1 200 appareils
de cette génération ont été produits.
Selon des responsables d'Airbus, Boeing avait prévu
de lancer, à la fin 2007, une nouvelle famille de moyen-courriers pour
remplacer les 737-600/700/800/900 reprenant des technologies
développées pour le 777-200LR et pour le 787; le lancement a
finalement été repoussé à une date
ultérieure non déterminée
2.3 CARACTERISTIQUES
2.3.1 ANCIENNE GENERATION DE BOEING 737

2.3.2 NOUVELLE GENERATION DE BOEING 737

2.4 Principaux accidents de Boeing
737
? Le 8 janvier 1989 un Boeing 737-400 qui assurait le vol 92
British Midland s'écrase sur un talus de l'autoroute M1 près de
Kegworth dans le Leicestershire au centre de l'Angleterre. L'avion essayait de
faire un atterrissage d'urgence à l'aéroport d'East Midlands tout
proche suite à un problème de moteurs. 47 personnes furent
tuées et 74 dont les 7 membres d'équipage gravement
blessées. Suite à cet accident, les 99 Boeing 737400 alors en
service furent cloués au sol en attente d'une modification de leur
moteur,
l'enquête ayant démontré une faiblesse
des ailettes sur la nouvelle version des réacteurs des 400.
· 3 mars 1991 un Boeing 737 d'United Flight, vol 585,
s'écrase suite à une perte de contrôle de l'appareil, tuant
tous les passagers et membres d'équipage.
· 8 septembre 1994 un Boeing 737-300 d'USAir, vol 427,
décolle de Chicago O?Hare Airport en route pour Pittsburgh,
Pennsylvanie. À 19h03, le pilote perd le contrôle de l'appareil,
les 127 passagers et 5 membres d'équipage meurent dans
l'accident.
Les causes de ces deux accidents (vol 585 et vol 427) ne
seront expliquées que 4 ans et demi plus tard suite à un nouvel
incident similaire intervenu le 6 juin 1996 sur le vol 517 de la compagnie
Eastwind Airlines. Il s'agit de la plus longue enquête de l'histoire de
l'aviation civile.
· 6 mars 2003 un Boeing 737-200 d'Air Algérie
s'écrase à Tamanrasset, faisant 102 morts dont plusieurs
Français, et 1 survivant.
· 8 juillet 2003 un Boeing 737-200 de Sudan Airways
s'écrase dans un vol intérieur. On ne retrouve qu'un seul
survivant parmi les 117 passagers.
· 3 janvier 2004 le 737-300 de la compagnie charter
égyptienne Flash Airlines s'enfonce dans la Mer Rouge peu après
son décollage de Charm el-Cheikh. 148 personnes, en grande
majorité des touristes français, meurent dans l'accident.
· 3 février 2005 Un 737-200 d'une compagnie
privée afghane s'écrase dans la région de Kaboul, tuant
ses 104 occupants.
· 14 août 2005 le Vol Helios Airways 522 de la
compagnie chypriote Helios Airways s'est écrasé avec 115
passagers à son bord, dont 48 enfants et 6 membres d'équipage. En
provenance de Larnaca (Chypre) et à destination de Brno
(République tchèque), l'appareil s'est crashé sur une zone
non habitée à Varnava, à 40 kilomètres
d'Athènes en Grèce. Il n'y a aucun survivant. 20 octobre 2005 :
Il se confirmerait qu'à la suite d'une
intervention technique, la vanne de pressurisation est
restée en position manuelle, donc ouverte. Durant la montée
(dépressurisée), l'équipage n'aurait pas clairement
identifié l'alarme « cabin altitude » en la confondant avec
l'alarme de configuration décollage (dont ils n'ont pas tenu compte
puisqu'ils étaient déjà en vol).
· 23 août 2005 un Boeing 737-200 de la TANS
Peru s'écrase peu avant l'atterrissage à Pucallpa au
Pérou, tuant 40 de ses 98 passagers.
· 5 septembre 2005 un 737-200 de la compagnie
indonésienne Mandala Airlines s'écrase peu après le
décollage sur une zone habitée de la ville de Medan dans
l'île de Sumatra. Le bilan est lourd : 101 des 117 occupants de l'avion
et 47 victimes au sol.
· 22 octobre 2005 un Boeing 737-200 de la compagnie
Bellview Airlines (Nigéria) s'écrase trois minutes après
son décollage de Lagos, près de Otta. Ce vol en direction de
Abuja transportait 116 passagers, aucun survivant.
· 29 septembre 2006 un Boeing 737-800 de la compagnie
brésilienne Gol disparaît des écrans radar, suite à
une collision avec un Embraer Legacy 600 (avion d'affaires à
réaction, capacité de 16 personnes), durant le vol 1907 entre
Manaus et Brasilia. 155 personnes (dont 149 passagers) étaient à
bord. Aucune ne survit au crash. Aucun des 7 occupants du Legacy 600 ne
fût blessé.
· 1er janvier 2007 un Boeing 737-400 de la
compagnie indonésienne Adam Air, vol 574, disparaît avec 102
personnes à bord.
· 7 mars 2007 un Boeing 737-400 de la compagnie
indonésienne Garuda Indonesia rate son atterrissage sur une des pistes
de l'aéroport de Yogyakarta, dans l'île de Java. Selon la
compagnie aérienne, le bilan est de 22 morts et 108 blessés sur
les 140 passagers que comptait le vol. Il semblerait que la vitesse trop
élevée lors de l'atterrissage soit à l'origine de
l'accident.
· 5 mai 2007 un Boeing 737-800 de la compagnie Kenya
Airways dont on avait perdu la trace après son décollage au
Cameroun, s'écrase. L'appareil transportait 106 passagers et 8 membres
d'équipage, en plus du pilote. Il effectuait la liaison entre Abidjan,
en Côte d'Ivoire et la capitale du Kenya, Nairobi, avec escale dans la
ville camerounaise de Douala. Aucun survivant.
· 20 août 2007 un Boeing 737-800 de la compagnie
Taïwanese China Airlines voit un de ses deux réacteurs prendre feu
quelques instants après son arrivée au parking à
l'aéroport de Naha (Japon). Les 157 passagers et 8 membres
d'équipage sont sains et sauf.
· 3 janvier 2008 un Boeing 737-400 de la compagnie
Marocaine low cost Atlas Blue filiale de Royal Air Maroc est sorti de la piste
lors de son atterrissage à l'aéroport de Deauville St Gatien en
France. Il semblerait que la vitesse trop élevée lors de
l'atterrissage, aggravée par une présence de verglas en fin de
piste, soit à l'origine de l'accident. Les 168 passagers et les 5
membres d'équipages en sont sortis indemnes.
· 21 mars 2008 un Boeing 737 de la compagnie irlandaise
Ryanair en provenance de l'aéroport de Charleroi a fait une sortie de
piste sur l'aéroport de Limoges. Cet accident serait dû au mauvais
temps à l'arrivée, notamment au verglas et au vent fort au moment
de l'atterrissage. Il y a eu 6 blessés légers.
· 28 juillet 2008 un Boeing 737-800 de la compagnie
australienne Qantas a été contraint d'effectuer un atterrissage
d'urgence à Adélaïde, dans le sud de l'Australie,
après l'ouverture d'une porte en plein vol. L'appareil avait
quitté Adélaïde à 18H08 locales pour Melbourne et a
fait demi-tour après 37 minutes de vol.
· 24 août 2008 un Boeing 737-200 de la compagnie
kirghize Itek Air s'est écrasé au décollage près de
l'aéroport de Bichkek, capitale du Kirghizstan. L'avion était en
partance pour l'Iran avec 90 personnes à bord dont 65 sont mortes dans
l'accident[2].
· 25 août 2008 un Boeing 737 de la compagnie
Ryanair en provenance de Londres s'est dépressurisé en vol
à 8500m d'altitude vers minuit. Le Boeing a dû se poser d'urgence
à l'aéroport de Limoges. Il y a eu 16 blessés.
· 14 septembre 2008 un Boeing 737 de la compagnie
Aeroflot s'est écrasé près de Perm, dans l'Oural. Les 82
passagers, plus un bébé et les cinq membres d'équipages
sont tous morts. Le crash a eu lieu peu avant l'atterrissage du vol en
provenance de l'aéroport de Sheremetyevo de Moscou.
· 25 février 2009 un Boeing 737-800 TC-JGE sur
le vol TK1951 de la compagnie Turkish Airlines s'est écrasé
à Amsterdam, près de la piste 18 R de l'aéroport
d'Amsterdam-Schiphol. Sur les 127 passagers, neuf sont morts et 50
blessés. Une cinquantaine de personnes furent indemnes. L'avion s'est
brisé en trois parties, la partie avant fut la moins endommagée.
Le crash a eu lieu peu avant l'atterrissage du vol en provenance de
l'aéroport Atatürk de Istanbul.
2.5 CFM International CFM56 : réacteur Boeing
737
CFM International CFM56 est le nom
d'une série de turboréacteurs à fort taux de dilution
fabriqués par CFM International et d'une poussée de 82 kN
à 151 kN.
C'est aujourd'hui la gamme de moteurs à
réaction la plus vendue au monde avec plus de 15 000 exemplaires en
service équipant plus 6000 avions.
Il équipe de nombreux avions différents :
McDonnell Douglas DC-8, Boeing C-135, Boeing 737, Airbus A318/319/320/321 et
Airbus A340

CFM56 vu de face
2.5.1 HISTORIQUE 2.5.1.1 NAISSANCE
Le CFM56 est issu du réacteur General Electric F101
destiné au bombardier stratégique Rockwell B-1 Lancer.
Au sein de CFM International, GE Aircraft Engines est
chargé de la partie haute pression du moteur, aussi appelé «
core » (compresseur haute pression, chambre de combustion et turbine haute
pression) et Snecma de la partie basse pression (la soufflante ou fan,
compresseur basse pression et turbine basse pression) ainsi que des accessoires
et de la tuyère d'éjection.
Chacune des entreprises a sa propre ligne d'assemblage et
produit donc des réacteurs complets. Le nom CFM-56 n'est pas un
acronyme, c'est un clin d'oeil aux noms des moteurs les plus importants que
fabriquaient General Electric (Le CF6) et la SNECMA (le M5) au moment du
lancement du projet.
2.5.1.2 CFM56-2
C'est la première version du réacteur qui fut
conçu pour remotoriser les McDonnell Douglas DC8.
Ce fut un succès et le CFM56-2 fut également
choisi pour remotoriser les avions de la famille Boeing C-135 (la plupart sont
des ravitailleurs).
Environ 1800 CFM56-2 ont été produits, d'une
poussée qui va de 98 à 108 kN. 2.5.1.3
CFM56-3
Après le succès du CFM56-2 sur le
marché de la modernisation d'avions anciens, le CFM56-3 consacrera la
réussite en étant choisi par Boeing comme motorisation exclusive
pour sa nouvelle gamme de Boeing 737, les Boeing 737-300, 400 et 500,
également appelés Boeing 737 Classic.
Plus de 4500 CFM56-3 ont été construits depuis
sa certification en 1984, ce qui en fait le réacteur le plus largement
produit de toute l'histoire de l'aviation dans une gamme de poussée de
82 à 105 kN
Le Boeing 737 ayant été conçu à
la base avec un réacteur de plus petit diamètre, il a fallu
réduire la hauteur du réacteur pour qu'il ne frotte pas par
terre. Les ingénieurs ont donc été obligés de
situer le boîtier d'accessoires sur le côté du moteur ce qui
donne cet aspect caractéristique à la nacelle.

Après le succès sur les biréacteurs
court et moyen courriers des versions précédentes, le CFM56-5C
conçu pour l'Airbus A340 marque un retour aux quadriréacteurs
long courriers.
Une entrée aplatie de Boeing 737 2.5.1.4
CFM56-5A ET CFM56-5B
Sur la lancée du modèle
précédent, le CFM-56-5A fut conçu pour le grand rival du
Boeing 737, l'Airbus A320.
Le CFM56-5A a été certifié en 1987, et
est disponible dans des poussées de 98 à 118 kN. C'est
également le premier modèle de CFM-56 à disposer d'un
système de régulation électronique pleine autorité
(FADEC).
Le CFM56-5A équipera également l'Airbus A319
à sa sortie en 1996.
Le CFM56-5B est une évolution du CFM56-5A qui entre
en service en 1994 et équipe toute la gamme des Airbus A318, A319, A320
et A321. Il est disponible dans une gamme de poussée de 98 à
142,50 kN.
Contrairement au Boeing 737 où il est la seule
motorisation possible, les CFM56-5A et CFM56-5B sont en concurrence avec
l'International Aero Engines V2500 (A319, A320 et A321) ainsi qu'avec le Pratt
& Whitney PW6000 (A318) et équipent environ 60 % des avions de la
famille A320. Plus de 2500 exemplaires ont été produits à
ce jour.
2.5.1.5 CFM56-5C
Le CFM56-5C équipe en exclusivité les
versions A340-200 et A340-300 et dispose de poussées comprises entre 139
et 151 kV.
Pour le CFM56-5C, CFM International fournit un ensemble
complet spécialement optimisé comprenant le moteur, la nacelle et
la tuyère d'éjection.
Pour les versions A340-500 et A340-600, le CFM56 ne sera
plus assez puissant, et Airbus aura recours à quatre Rolls-Royce Trent
500 d'une taille mieux proportionnée à l'avion.
2.5.1.6 CFM56-7B
Le CFM56-7B est le réacteur qui équipe en
exclusivité les dernières évolutions du Boeing 737, les
versions B737-600, 700, 800 et 900 dites Boeing 737 VG pour nouvelle
génération.
Il a été certifié en 1996, dispose des
dernières avancées technologiques et est disponible dans des
poussés de 87 à 121 kV.
2.5.2 STATISTIQUES CFM56

CHAPITRe 3.
INSTRUMENT DE BORD
D'AVION
Figure 3.1 : Tableau de bord
d'avion
Chapitre 3. Instruments de bord d'avion
3.1 Introduction
L'étude et la conception d'une procédure de
test du tableau de bord (Front panel) nécessitent tout d'abord une
connaissance des différents éléments formant ce dernier
ainsi que la synthèse des instruments et des équipements
disponibles pour l'achèvement de notre travail.
En effet, Le tableau de bord renferme tous les
équipements nécessaires pour la radionavigation et pour le
contrôle automatique du vol ainsi que pour la surveillance des
paramètres moteurs et autres systèmes.
Ce chapitre est une présentation des instruments du
tableau de bord, l'objet de notre étude est de créer une
procédure de test assurant la vérification des performances des
instruments durant une opération de maintenance.
3.2 Tableau de bord d'un avion (Front
panel)
3.2.1 Introduction
Les instruments de bord d'un avion fournissent au pilote
toutes les informations nécessaires pour le maintien en vol de l'avion,
à sa navigation, à sa communication avec les infrastructures de
la gestion du trafic aérien.
Les instruments sont regroupés sur le tableau de bord
aussi près que possible du pilote.
Les quatre instruments de base sont toujours disposés
de la même façon: l'horizon artificiel au centre,
l'anémomètre à sa gauche, l'altimètre à sa
droite, le gyro directionnel en dessous (Voir Figure 3.1). Cette disposition
permet d'optimiser le circuit visuel au cours du vol. La disposition des autres
instruments est relativement standard mais varie d'un avion à un
autre.

Avec la généralisation des écrans
rassemblant toutes les informations de base sur une seule surface de
visualisation, les instruments conventionnels ne sont conservés sur les
planches de bord équipées d'écrans qu'à titre
d'instruments de secours pour pallier une éventuelle défaillance
des systèmes électroniques.
3.2.2 Compas magnétique
Cet instrument permet de mesurer l'orientation
magnétique de la trajectoire. Il s'agit d'une boussole
élaborée dont l'élément indicateur est une rose des
caps associée à un barreau aimanté (Figure 3.2). La rose
des caps est divisée en 360 °, l'information de cap est
donnée par le déplacement de la ligne de foi, liée
à l'avion, devant la rose graduée.

Figure 3.2 : Indicateur compas magnétique 3.2.3
Instruments aérodynamiques
Ils utilisent les propriétés liées
à la pression de l'air environnant. Une sonde disposée sur
l'avant du fuselage permet de capter la pression totale à un endroit
où la pression créée par l'écoulement de l'air
autour de l'avion (vent relatif) et la pression atmosphérique
régnante s'additionnent. Des prises d'air disposées sur le
côté du fuselage de l'aéronef permettent de mesurer la
pression atmosphérique pure (pression statique) à un endroit
où le déplacement de l'air n'a aucun effet. La vitesse de l'avion
par rapport au vent peut alors être déduite de la
différence entre pression totale et pression statique. Cette
différence, représente la pression dynamique, proportionnelle
à la vitesse de l'avion par rapport à l'air.
3.2.3.1 Altimètre
C'est un baromètre étalonné en fonction
d'une atmosphère standard qui convertit une pression statique en
altitude (généralement mesurée en pieds). Il est
constitué d'une capsule anéroïde. La pression diminuant avec
l'altitude, cette capsule se déforme plus ou moins selon l'altitude de
l'avion. Cette déformation est transmise à une aiguille qui se
déplace devant un cadran gradué (Figure 3-3).

Figure 3.3 : Indicateur Altimètre
3.2.3.2 Anémomètre
L'anémomètre est l'indicateur de vitesse
relative de l'avion par rapport à la masse d'air qui l'entoure. Il peut
être gradué en noeuds ou en Km/h (Figure 3-4).

Figure 3.4 : Indicateur
Anémomètre
Il mesure un écart entre la pression totale de l'air
en avant de l'avion (tube de Pitot) et la pression statique mesurée sur
les prises de pression statique (Figure 3-5). Une capsule anéroïde
vidée d'air se déforme plus ou moins en fonction de cet
écart, et un dispositif mécanique relié à cette
capsule fait tourner l'aiguille indicatrice.

Figure 3.5 : Principe Le
l?Anémomètre
3.2.4 Instruments gyroscopiques
Ils utilisent les propriétés des corps en
rotation rapide qui sont les gyroscopes : fixité de l'axe du rotor dans
l'espace absolu, couple gyroscopique, précession. Les gyroscopes
classiques sont entraînés par une pompe à vide ou un moteur
électrique qui leur confère une vitesse de rotation très
élevée (10 000 t/mn dans le premier cas, 20 000 t/mn dans le
second).
3.2.4.1 Gyro compas / Gyro Directionnel
Il s'agit d'un gyroscope à deux degrés de
liberté qui permet de conserver une référence de cap de
façon beaucoup plus précise qu'un compas magnétique. Il
est asservi à une vanne de flux qui permet de le recaler automatiquement
en fonction du champ magnétique terrestre (Figure 3-6).

Figure 3.6 : Indicateur Gyro compas
3.2.4.2 Horizon artificiel
Il s'agit d'un gyroscope à deux degrés de
liberté qui permet de visualiser l'attitude de l'avion par rapport
à ses axes de roulis et de tangage et plus précisément de
leurs angles avec un plan horizontal : assiette et inclinaison (Figure
3-7).

Figure 3.7 : Indicateur horizon
artificiel 3.2.4.3 Indicateur de virage et de dérapage
(bille-aiguille)
L'indicateur de virage est un gyroscope à un
degré de liberté qui permet de visualiser le taux de virage (et
non l'inclinaison) de l'avion (Figure 3-8). Il est associé à une
bille qui se déplace dans un tube incurvé selon la verticale
apparente et qui visualise le dérapage de l'avion. La bille fonctionne
simplement par gravité.

Figure 3.8 : Indicateur de
virage
3.2.5 Instruments de
radionavigation
Ils utilisent des stations au sol ou des satellites pour
fournir des indications sur la position de l'avion dans l'espace.
3.2.5.1 ADF (Automatic Direction
Finder)
Une antenne sur l'avion capte un signal radio (dans la bande
de fréquence de 190 kHz à 1750 kHz) émis par un
émetteur au sol. L'information délivrée au pilote est
présentée par une aiguille qui indique la direction de cette
station (Figure 3-9).

Figure 3.9 : Indicateur
ADF
3.2.5.2 VOIX (VHF Omnidirectional
IXange)
Une antenne sur l'avion capte un signal radio (dans la bande
de fréquence de 108 à 118 MHz) émis par un émetteur
au sol appelé VOIX. L'information délivrée au pilote est
présentée par une aiguille qui indique le cap à suivre
pour se diriger vers (ou s'éloigner de, selon la sélection) cette
station (Figure 3-10).

Figure 3.10: Indicateur
VOR
3.2.5.3 DME (Distance Measuring
Equipment)
Le DME est une aide à la navigation courte et moyenne
distance Petite et moyenne distance fournissant une distance oblique par
rapport à une station au sol. L'avion envoie des impulsions (dans la
gamme UHF : 962 - 1213 MHz) dans toutes les directions. Ces impulsions sont
captées et amplifiées par une station au sol qui les retransmet
en omnidirectionnelle avec un retard de 50ìs. Le récepteur de
bord mesure le temps de réponse en tenant compte du délai de
50ìs et affiche la distance sur un cadran digital.
3.2.5.4 ILS (Instrument Landing
System)
L'ILS est un système qui permet l'atterrissage aux
instruments par visibilité réduite. Il comprend
:
· LOCALIZER: fournit au pilote des informations
continues d'écart par rapport à un plan vertical contenant l'axe
de piste.
· GLIDE PA7H: fournit au pilote des informations
continues d'écart par rapport à un plan oblique de descente
aboutissant a la piste
· MARKER: fournit au pilote des informations
discontinues de distance au seuil de piste.
3.3 Appareil désigné pour la
procédure de test
Vu la disponibilité de l'instrument KI214 au sein du
l'IMA et les raisons de sécurité qui nous ont été
un obstacle face à la manipulation de tous les instruments du tableau de
bord.
On a limité notre étude sur les signaux
provenant du KI214 qui, étant une combinaison entre le VOR et le ILS,
représentent des facteurs très importants pour la localisation et
l'atterrissage de l'avion.
3.3.1 Visualisation de l'information
Le KI214 comporte un sélecteur de direction (OBS) qui
permet au pilote d'indiquer la direction qu'il souhaite suivre; une aiguille
indique la dérive de l'avion par rapport à la direction
sélectionnée. Un indicateur 7O/FROM permet de savoir si la
direction sélectionnée va en direction de la station au sol (7O)
ou s'éloigne de la station (FROM). Une aiguille (GLIDE)
QDR.
assure l'alignement de descente comme l'indique la figure
3-11. Lorsque la communication est interrompue, les FLAGS sont apparus
[2].

Figure 3-11 : Indicateur VOR/ILS
(KI214). 3.3.2 Le VOR (VHF Omni Range)
3.3.2.1 Définition
Le VOR est un instrument de navigation à courte et
moyenne distance qui permet de connaître la route magnétique
depuis une station au sol et par déduction il permet de suivre n'importe
quelle route passant par la station (en rapprochement ou en éloignement
de celle-ci).
Le but du VOR est de fournir une information du QDR (Angle
entre le Nord magnétique et la direction de la station) dans toutes
directions grâce à la station d'émission au sol (Figure
3-12).

Figure 3-12 : Indicateur
QDR.
3.3.2.2 Principe du VOR
Le principe du VOR (Figure 3-13) est de créer une
émission dont la phase dépend de l'avion recherché. Cette
émission est une porteuse VHF modulée de façon à
transmettre simultanément et indépendamment deux signaux BF
à 30Hz:
· Signal référence (30 Hz REF) ayant la
phase indépendante de l'azimut.
· Signal de position (30 Hz VAR) ayant une phase
caractéristique de l'azimut. La différence de phase entre le
signal de position et le signal de référence fournit
l'information de

Figure 3-13 : Principe du
VOR
3.3.2.3 Equipement de bord
L?équipement de bord (Figure 3-14) comprend
:
· Une antenne VHF
· Récepteur VHF
· Circuit VOR
· Indicateur QDR

Figure 3-14 : Schéma
Synoptique de l?équipement de bord. 3.3.3 ILS (Instrument
Landing System)
3.3.3.1 LOCALIZER
L'indicateur d'alignement ("LOCALIZER") visualise la
position de l'avion, dans la phase d'approche, par rapport au plan vertical
passant par la piste (Figure 3-15). L'aiguille permet de visualiser
l'écart de l'avion par rapport au plan vertical.

Figure 3-15 : Exemple de
position du LOCALIZER
Le LOCALIZER est constitué d?un ensemble d'antennes
situées après le bout de la piste qui émettent une
porteuse VHF entre 108 et 112MHz. Elle est modulée par 2 basses
fréquences l'une à 90Hz et l'autre à 150Hz. A droite de
l'axe de la piste, le taux de modulation pour 150Hz est supérieur
à celui pour 90Hz et inversement à gauche de l'axe. La
différence de taux permet d'en déduire un écart qui est
affiché sur le récepteur de bord. Le digramme de rayonnement est
représenté dans la figure 3-16.

Figure 3-16 : Diagramme de
rayonnement.
3.3.3.2 GLIDE PATH
Le Glide PATH est une aide à la navigation courte
distance. Il fournit au pilote une indication continue d'écart à
un plan oblique matérialisant le plan de descente.
Le GLIDE est constitué par un ensemble d'antennes
situées à 120 m sur le coté de la piste, près du
seuil, qui émettent une porteuse UHF entre 329 et 335 MHz
appariée à la fréquence du LOCALIZER. Elle est
modulée par 2 basses fréquences l'une à 90 Hz et l'autre
à 150Hz. La
différence de taux permet d'en déduire un
écart qui est affiché sur le récepteur de bord. Le
digramme de rayonnement est représenté dans la figure
3-17.

Figure 3-17 : Diagramme de
rayonnement
3.4 Conclusion
Dans ce chapitre, on a pu se familiariser avec les
différents instruments de bord. Dans un premier temps, nous avons
effectué l?étude de leurs caractéristiques, on a
consacré une grande partie pour analyser le fonctionnement du KI214 et
de tester ses différentes entrées sorties, ce qui est la phase la
plus délicate du travail et qui est le premier pas vers le choix des
différentes composantes formant la chaîne d'acquisition de notre
procédure de test.
CHAPITRE 4.
CONCEPTION DES DIFFéRENTS
MODULES DU TEST
DU KI214
Chapitre 4. Conception des différents
modules du test du 7(I214
4.1 Introduction
La commande et la manipulation des signaux de test
envoyés vers l'instrument 7(I214 ont fait appel à la
présence d'une carte d'acquisition assurant la communication de cet
instrument avec un ordinateur qui, à travers une interface simple
à manipuler, assurera à la fois le transfert et le contrôle
des données (Figure 4-1).

Figure 4-1 : Schéma
général.
Ce chapitre portera sur les détails du protocole de
communication adopté et sur la description du fonctionnement de la carte
ainsi que les techniques qui seront choisies pour assurer sa communication avec
l'instrument d'une part et avec l'ordinateur d'une autre part.
4.2 Conception du système de contrôle et de
test du 7(I214
L'étude de la création de notre application en
dépit de son complexité est découpée en
sous-ensembles qui échangent des informations suivant un protocole bien
défini. Chaque sous-ensemble est subdivisé à son tour. Un
système est construit comme une hiérarchie d'objets, les
détails de réalisation se précisant au fur et à
mesure que l'on descend dans cette hiérarchie.
4.2.1 Structure générale
Dans cette structure générale,
représentée par la figure 4-2, deux liaisons sont
réalisées :
? L'ordinateur communique avec la carte d'acquisition par
l'intermédiaire de la liaison série RS232, cette carte est
constituée de 3 blocs assurant le transfert de données en
gérant l'émission, la réception et le contrôle de la
vitesse de transmission, et d'un bloc réalisant la commande et le
contrôle de ces derniers.
? La carte d'acquisition traduit les données
reçues par l'ordinateur en instructions affectées à
l'instrument sujet de notre test.

Figure 4-2 : Structure
générale.
4.2.2 Module de commande et de
contrôle
Ce module principal permet la gestion et la synchronisation
entre les différentes composantes de notre système. Il
gère à la fois la communication et contrôle le flux de
données véhiculées pour assurer l'exactitude et la
fiabilité de notre application (Figure 4-3).

Figure 4-3 : Module de commande et
de contrôle.
Les données reçues par la liaison RX sont
traitées par le module de décodage de protocole (Voir paragraphe
3.2.6). Selon les informations obtenues, le bloc chargé de la
sélection de la commande traduit les ordres imposés par
l'utilisateur en un nombre bien déterminé de commandes. Enfin un
message est transmis par TX contenant selon les données
véhiculées soit un message d'erreur en cas du disfonctionnement
du traitement des données soit un accusé indiquant le bon
fonctionnement du système.
4.2.3 Module de l'Emission
La conversion parallèle/série
réalisée par ce module nous permet d'avoir comme sortie
l'équivalent en série sur TX de la trame parallèle
reçue par le bus DATA. Tandis que le module Div_fréquence, nous
offre la possibilité de réduire la fréquence de
fonctionnement de la carte d'acquisition en une fréquence adaptée
à notre application (Figure 4-4).

Figure 4-4 : Module de l'Emission.
4.2.4 Module de la Réception
Ce module réalise la conversion
série/parallèle suite à une détection du bit de
START, la conversion s'achève lors de la détection d'un bit de
STOP. De plus, il contient le module Div_fréquence déjà
définit le paragraphe précédent.

Figure 4-5 : Module de la
Réception.
4.2.5 Module de commande de Baud
La variation de Ça vitesse de communication est un
choix propre à Ç'utilisateur, ce module traduit la commande
reçue en une vitesse bien déterminée (Figure 4-6).

Figure 4-6 : Module de la commande
baud. 4.2.6 Module de décodage du protocole

Ce module est constitué de deux principaux blocs
(Figure 4-7), le premier effectue la réception permettant de transformer
la trame reçue du série en parallèle. Celle-ci sera
traitée par le bloc de Commande et Réception Data, qui la
subdivise en deux parties qui seront utilisées directement par le module
de sélection de la commande.
Figure 4-7 : Module de
décodage du protocole.
La trame de données à décoder est
constituée de 24 bits subdivisés en 2 parties, la première
sur 8 bits, tandis que la deuxième repartie sur 16 bits, comme
Ç'indique Ça figure 4-8.
? Le premier bit permet la sélection d'une commande
ou d'une information(C/I).
· Le deuxième bit permet de choisir
entre un ordre de lecture ou d'écriture (R/W).
· Les 6 bits suivants sont destinés au choix du
code.
· Les 16 bits restant forment la donnée à
traiter.

Figure 4-8 : Forme de la trame
à décoder. 4.2.7 Module Gen_Erreur
Le module de génération des erreurs surveille
les données véhiculées, si une correspondance entre
celles-ci et le tableau d'erreur est détectée, un message
sera transmis à l'aide du bloc d'Emission par la voie TX
(Figure 4-9).

Figure 4-9 : Module de génération de
l'erreur.
4.2.8 Module de sélection de la
commande
Les données reçues sont
analysées par l'unité de contrôle
commande, selon la base de données déjà existante (tableau
de commande) des décisions seront prises, elles doivent correspondre
exactement au choix de l'utilisateur. En cas de problème, la
gestion d'erreurs intervient en signalant la cause (Figure
4-10).

Figure 4-10 : Module de
sélection de la commande.
4.2.9 Module de validation de la réception
Dans le cas d'un fonctionnement normal (pas d'erreurs
détectées), un accusé de réception signale que la
procédure s'est effectuée convenablement en envoyant un message
à travers la sortie TX.

Figure 4-11 : Module de la bonne
réception. 4.2.10 Interface Série
Asynchrone
Ce type de liaison, que l'on confond de plus en plus souvent
avec les liaisons RS232, définit en fait un protocole de transfert de
données au moyen d'un fil de signal et d'un fil de masse. La norme RS232
précise les niveaux électriques des signaux chargés de
véhiculer ce protocole et y ajoute un certain nombre de signaux de
contrôle.
4.2.10.1 Principe d'une liaison série
asynchrone
Pour établir une liaison série à partir
des données parallèles contenues dans la mémoire de
n'importe quel système informatique, il suffit d'utiliser un registre
à décalage, en mode parallèle-série à
l'émission et série-parallèle à la
réception. Cela fonctionne très bien et conduit à
réaliser ce que l'on appelle une liaison série synchrone. Ce type
de liaison présente toutefois un inconvénient : il impose de
transmettre l'horloge, en plus des données, afin que les registres
à décalage utilisés de chaque côté de la
liaison fonctionnent rigoureusement à la même vitesse.
L'idée de la liaison série asynchrone reste la
même que celle de la liaison série synchrone. De ce fait, il
existe à l'émission et à la réception deux horloges
qui doivent fonctionner à la même fréquence. Par contre,
ces fréquences peuvent différer de quelques pourcents et,
surtout, les horloges n'ont pas besoin d'être synchronisées. La
mise en oeuvre d'une telle liaison est donc très aisée puisqu'il
suffit de réaliser, côté émission et coté
réception, une horloge à quartz toute
simple.
4.2.10.2 La norme RS232
4.2.10.2.1 Caractéristique
RS232 correspond en réalité à la
liaison série de la norme RS232 (Recommended Standard 232). La liaison
RS232 est une liaison série asynchrone permettant la communication
bidirectionnelle entre deux équipements.
4.2.10.2.2 Protocole de transmission
Le protocole de transmission RS232 comporte des trames ayant
la structure présentée dans la figure 4-12 :
Un bit de start : la ligne au repos
est à l'état logique '1'. Pour indiquer qu'un mot va être
transmis, la ligne passe à l'état bas avant de commencer le
transfert. Ce bit permet de synchroniser l'horloge du récepteur.
Longueur des mots à transmettre:
7 bits ou 8 bits.
Un bit de parité : le mot
transmis peut être suivi ou non d'un bit de parité qui sert
à détecter les erreurs éventuelles de transmission. Il
existe deux types de parité:
? Parité paire: le bit ajouté à la
donnée est positionné de telle façon que le nombre des
états 1 soit pair sur l'ensemble donné + bit de
parité.
? Parité impaire: le bit ajouté à la
donnée est positionné de telle façon que le nombre des
états logiques '1' soit impair sur l'ensemble donnée + bit de
parité.
Bit de stop: après la
transmission, la ligne est positionnée au repos pendant 1, 1,5 ou 2
périodes d'horloge selon le nombre de bits de stop.

Figure 4-12 : Format d'une
donnée série.
4.2.10.2.3 Port RS232
La norme RS232 définit le nombre de lignes de
contrôle, présentées avec leurs appellations sur la figure
4-13 :

Figure 4-13 : Connecteur type DB
9.
Rx : (Received Data)
Données reçues
Tx : (Transmitted Data)
Données émises
DTR : (Data Terminal Ready) Elle
permet à l'ordinateur de signaler au correspondant que le port
série a été libéré et qu'il peut être
utilisé s'il le souhaite
CD : (Data Carrier Detect) signale
à l'ordinateur qu'une liaison a été établie avec un
correspondant.
DSR : (Data Set Ready) permet au
correspondant de signaler qu'une donnée est prête.
RTS : (Request to Send) indique au
correspondant que l'ordinateur veut lui transmettre des données.
CTS : (Clear to Send) indique
à l'ordinateur que le correspondant est prêt à recevoir des
données. RI : (Ring Indicator) indique au l'ordinateur
que la ligne téléphonique à laquelle le modem est
relié est en train de sonner. Ce signal passe à '1' à
chaque sonnerie, puis repasse à 0', ce qui permet à
l'ordinateur de comptabiliser les sonneries.
4.3 Choix du matériel
La carte d'acquisition adoptée pour notre cas aura
pour mission de garantir l'émission d'un signal de test pour
vérifier la fonctionnalité du flag et des aiguilles du VOR et du
GLIDE, c'est-à-dire, pour s'assurer que l'instrument parvient avec
succès à détecter la direction de la station et à
assurer la réussite de l'atterrissage. Elle permettera également
la communication avec l'ordinateur qui constituera notre commande. On peut
choisir entre deux solutions : microcontrôleur ou
FPGA.
4.3.1 Microcontrôleurs :
Un microcontrôleur est une unité de traitement
de l'information de type microprocesseur contenant tous les composants d'un
système informatique. Il possède, d'une part, la puissance d'un
microprocesseur et présente, en d'autre part, un avantage
supplémentaire qui consiste à l'intégration de plusieurs
périphériques dans un même circuit tels que RAM, ROM,
périphériques E/S, convertisseurs A/N, en tenant compte aussi du
fonctionnement qui dépend du programme logé dans la
mémoire qui peut être modifié, à tout
moment.
Un microcontrôleur est composé
généralement de :
· Une unité centrale ou CPU (Central Processing
Unit) : qui exécute séquentiellement les instructions du
programme.
· Une mémoire Flash, cette mémoire a
la particularité de sauvegarder en permanence les informations qu'elle
contient, même en absence de tension.
· Une mémoire vive également
appelée RAM (Random Access Memory): pour sauvegarder temporairement des
informations (circuit alimenté). Le microcontrôleur utilise cette
mémoire pour stocker les variables temporaires ou faire des calculs
intermédiaires.
· Des ports entrées-sorties permettant de
dialoguer avec l'extérieur telle que l'acquisition de l'état des
capteurs, des interrupteurs ou le pilotage d'un relais, etc...
4.3.2 FPGA
Les circuits FPGAs (Field Programmable Gate Array)
permettent d'implémenter des systèmes numériques aussi
complexes, tout en ayant le grand avantage de pouvoir être
programmés électriquement. Ils sont principalement
composés d'un tableau d'éléments plus ou moins
complexes pouvant être configurés, ainsi que
d'un réseau complexe de connexions également configurables
(Figure 4-14).

Figure 4-14 : L'architecture
générale du FPGA.
La plupart des circuits de l'électronique moderne
sont programmés à partir d'un simple ordinateur directement sur
la carte où ils vont être utilisés, ce qui permet de
répondre à la fois aux critères de facilité de
stockage de l'information et de la rapidité. En cas d'erreur, ils sont
reprogrammables électriquement sans avoir à extraire le composant
de son environnement.
Pour ces raisons et vu la disponibilité de la carte
SPARTAN-3 au sein de la société ainsi que notre connaissance de
sa manipulation et de son langage de programmation (VHDL), ont
été des atouts qui nous on mené à la choisir comme
une interface de commande et d'acquisition de données.
4.4 La carte SPARTAN-3[3]
La carte SPARTAN-3 conçue pour l'apprentissage des
techniques de conception numérique. La présence de son FPGA
très largement dimensionné (près de 200K portes) et de ses
dispositifs de commandes et de visualisation divers. Figure 4-15 montre les
composants de la carte SPARTAN-3 avec leurs emplacements :
· Circuit XILLINX XC3S200 FPGA (1).
· Plate-forme flash 2 Mbits (XCF02S)
intégrée à la carte (2).
· Port VGA (3).
· Port série RS232 (4).
· Port PS/2 (5).
· 4 afficheurs 7 segments à LED (6).
· 8 interrupteurs (7) et 4 boutons-poussoirs
(8).
· 8 LED (9).
· Oscillateur 50MHz.
· 3 connecteurs d'extensions (10).

Figure 4-15: La carte
SPARTAN-3.
4.4.1 Développement d'une application sur
SPARTAN-3
La première étape de tout projet est la
définition du fonctionnement (Figure 4-16).
L'objectif est de décrire de façon
matérielle, mathématique et algorithmique les opérations
qui devront être réalisées. Cette description est ensuite
formalisée dans un langage informatique puis le fonctionnement global
vérifié par simulation comportementale. Une fois cette
étape est validée, l'opération de synthèse logique
et physique peut être effectuée. Elle consiste à utiliser
un logiciel permettant de traduire la description du fonctionnement d'un
système en une association de fonctions logiques
élémentaires. Elle aboutit à la génération
d'un code qui est envoyé sur la carte de traitement typiquement via un
câble parallèle. Si le résultat final n'est pas
satisfaisant, il faut identifier l'erreur ou l'imperfection en corrigeant la
description du système.

Figure 4-16 : Etapes de
développement d'une application.
4.5 VHOL [6]
4.5.1 Présentation
Le langage VHOL (Verv High Speed Integrated Circuit,
Hardware Language) est un langage fortement typé et conçu avec
des objectifs de spécification mais surtout de synthèse.
VHOL sert à décrire des circuits
matériels. Cependant, certaines constructions du langage sont de purs
outils de modélisation, utilisables pour simuler le fonctionnement d'un
système.
Elles ne sont pas toutes synthétisables. Avec ce
langage on peut développer à un niveau d'abstraction
souhaité. Ça sera le cas pour des routines de test ou des
descriptions comportementales.
Le langage VIDL permet d'étendre très
largement les bibliothèques en conception.
On peut aussi être obligé d'utiliser des
descriptions VIDL puisque des outils de description de plus haut niveau sont
capables de générer du VHOL privilégiant la forme
(netlist): le langage VHOL est alors la couche d'interface indispensable dans
le flot de conception.
4.5.2 Unité de conception
Une unité de conception est une pallie de programme
qui peut être compilée séparément. Cet aspect
modulaire est la base de la structuration de la description. Le support du
programme est un fichier texte qui peut contenir une ou plusieurs
unités.
Les unités de conception primaires correspondent
à la vue externe des objets:
? La spécification d'entité (entity)
définit les signaux d'entrées-sorties, leur type ainsi
que
leur mode (lecture seule. écriture seule,
lecture-écriture) ainsi que les procédures éventuellement
associées.
? La spécification de paquetage (package) permet de
regrouper des déclarations de types et/ou de sous-programmes et en fait
de construire des bibliothèques.
Elle offre ainsi la possibilité d'exporter un ou
plusieurs de ces objets.
Les unités de conception secondaires correspondent
aux algorithmes des modèles et des sous-programmes.
? L'architecture (architecture) est relative à une
entité. Elle contient les fonctionnalités et
éventuellement les relations temporelles du modèle
4.5.3 Synthèse de circuits
Le langage VHDL est un langage général de
description de matériel permettant un grand niveau d'abstraction. Un
système aussi complexe peut être décrit sous forme d'un
ensemble de blocs interconnectés. Le modèle de chaque bloc
permet, par la simulation, de se rendre compte du bon fonctionnement du
système.

Figure 4-17 : Etapes de
synthèse d'un circuit avec VHDL.
4.6 Interface graphique
L'objectif de la conception d'une interface graphique est de
permettre à l'utilisateur de mieux gérer son système, il
est guidé dans chaque étape de la procédure, il peut tout
commander simplement à travers le clavier et supervise les changements
qui affectent l'instrument sur l'écran de son ordinateur.
4.6.1 Visual Basic [5]
Visual Basic 6 est un environnement de développement
dans le sens où il contient des outils cohérents permettant le
développement d'applications. En effet, il contient à la fois :
un langage
de programmation et des outils pour la création
d'interfaces visuelles (dites aussi interfaces graphiques, ou interfaces
utilisateur ou encore interfaces Homme Machine).
Visual basic 6 fait partie de la sixième
génération de l'environnement Microsoft
Visual Basic. Son langage de programmation est basé
sur le langage de programmation Basic (beginners All-purpose Symbolic
Instruction Code) c'est-à-dire code d'instructions symboliques
multifonctions pour débutant.
Basic a été créé pour les
développeurs débutants, mais aujourd'hui, avec toutes les
fonctionnalités de Microsoft Windows 32bits, il est possible de
créer avec facilité des logiciels très
élaborés dotés d'un système de fenêtrage et
d'Interface Homme Machine (IHM).
Ce langage est caractérisé par :
· Langage graphique : dit aussi langage visuel qui
permet de créer les interfaces graphiques Homme-Machine contenant des
composants graphique comme les boutons de commande, les cases à cocher,
etc. il dispose ainsi d'une
boite à outils contenant l'ensemble des composants graphiques
intrinsèques, et certains de ces langages permettent en plus la
conception et la création de nouvelles composantes graphiques.
· Langage événementiel : Les composants
d'une application événementielle interagissent entre eux et avec
l'environnement. Ils communiquent en réponse à des
évènements. Ces évènements peuvent correspondre
à une action :
· De l'utilisateur : Un clic sur un bouton de commande,
une écriture dans une zone de texte, un choix dans une case d'option ou
une case à cocher, le déplacement d'un objet, etc.
· Du système : chargement d'une feuille, un top
déclenché par l'horloge, etc.
Les évènements sont captés par le
système d'exploitation, sont mis en file d'attente ce qui signifie que
les évènements sont séquentiels. Ils sont ensuite pris en
charge par la boucle de gestion des évènements à traiter
dans la file et les traiter. Le traitement d'un évènement
consiste à l'exécution d'une procédure
évènementielle. C'est le développeur qui doit
prévoir la procédure à exécuter en réponse
à un évènement donné.
4.7 Conclusion:
La carte SPARTAN-3, étant la carte d'acquisition
choisie pour être l'élément de base de notre
procédure de test, nécessite le développement d'un
programme réalisant la fonction de générer les signaux de
test de notre instrument. Le développement, la compilation ainsi que
l'implémentation de ce programme dans la carte feront l'objet du
chapitre prochain.
CHAPITRE 5.
IMPLéMENTATION DU
CODE EN VHDL ET TEST
DE L'INSTRUMENT
Chapitre 5. Implémentation du code en
VHDL
et test de l'instrument.
5.1 Introduction
Dans la phase de réalisation, on a définit le
protocole RS232 suivant afin d'assurer la communication entre la carte
SPARTAN-3 et l'ordinateur. :
Ø Un bit de start
Ø Longueur des mots à transmettre : 8
bits
Ø Un bit de stop
La première partie consiste à réaliser
ce protocole contenant à la fois les modules d'émission, de
réception et la variation de vitesse de communication. Puis, on a
simulé le fonctionnement de chaque partie.
5.2 Configuration de la carte SPARTAN-3
La figure ci-dessous représente la connexion entre la
carte SPARTAN-3 et l'ordinateur à travers le câble RS232. La
liaison entre l'instrument et la carte d'acquisition est assurée par les
connecteurs extérieurs du SPARTAN-3.

Figure 5-1 : Câblage des
diverses composantes.
Avant l'implémentation du programme, on doit
configurer les broches entrées/sorties de la carte SPARTAN-3 comme suit
[3]:

Tableau 5-1 : Affectation des
broches.
5.3 La communication entre PC et
SPARTAN-3
L'objectif de cette partie est de réaliser une liaison
série entre la carte SPARTAN-3 et PC, également appelée
UART (Universal Asynchronous Receiver/Transmitter), cette liaison série
est capable d'envoyer une donnée bit par bit sur un bus. Elle est
composée de 5 modules principaux : Ø Module top.
Ø Module Gen_UART_Clk.
Ø Module émission.
Ø Module réception.
converter.
Ø Module baud_
5.3.1 Le module top
Le module top gère tous les autres modules. Il assure
la synchronisation entre les différentes
parties. Il est composé de 4 entrées (Clk,
reset, Baud et Rx) et une sortie (Tx) comme l'indique la
figure 5-2. La description détaillée de chaque
module sera développée par la suite.
Ce Module fait appel aux autres modules comme suit :
S_BAUD : baud_converter port map
(clk,reset,baud,divisor);
S_CLK : Gen_UART_Clk port map
(clk,reset,divisor,clk_user);
S_TX : emission port map(clk_user, reset,rx_data, begin_tx,
tx, end_tx);
S_RX : reception port map(clk,reset,rx_data, rx,
end_rx,divisor);

Figure 5-3 : Le module
Gen_UART_Clk.
Figure 5-2 : Module du
TOP.
5.3.2 Module Gen_UART_Clk
L'horloge de la carte est de 50Mhz alors, pour transmettre
une trame de donnée a une vitesse de 9600bauds (bits par secondes) par
exemple, chaque bit prendra 104ìs pour être transmit. La
période de l'horloge est donc de 20ns, ce qui implique qu'il faut
5200tops d'horloge pour transmettre un bit. On utilise pour cela un compteur
comme la montre la figure 5.3.

Figure 5-5: Module
Baud_converter.
if clk = '1' and clk'event then
count <= count + 1;
if (count = DIV_16MEG-1) then
clk_user <= not clk_user;
count <= (others =>'0');
end if;
end if;
La figure ci-dessous représente la simulation de ce
module :

Figure 5-4 Simulation du module
Gen_UART_Clk. 5.3.3 Module baud_converter
Dans notre cas la vitesse de transmission est variable,
d'où un module de conversion est nécessaire pour élargir
la plage de la vitesse de transmission qui aura la possibilité de varier
de 1200 jusqu'à 115200bauds. Pour cela nous allons utiliser un module
appelé baud_converter, qui reçoit comme entrée le signal
d'horloge Clk, reset et le choix de la vitesse de transmission par
l'entrée baud (La figure 5.5)

end if; end if;
case baud is
when "0000" => Divisor<= CONV_STD_LOGIC_VECTOR(217,32);
--115.200 when "0001" => Divisor <= CONV_STD_LOGIC_VECTOR(434,32);
--57.600 when "0010" => Divisor <= CONV_STD_LOGIC_VECTOR(651,32);
--38.400
when "0011" => Divisor <=
CONV_STD_LOGIC_VECTOR(1302,32); -- 19.200
when "0100"=> Divisor <=
CONV_STD_LOGIC_VECTOR(2500,32); 9.600-when "0101" => Divisor <=
CONV_STD_LOGIC_VECTOR(5208,32); -- 4.800 when "0110" => Divisor <=
CONV_STD_LOGIC_VECTOR(10416,32); --2.400 when "0111" => Divisor <=
CONV_STD_LOGIC_VECTOR(20833,32);--1.200 when others => Divisor <=
(others=> '0');
end case;
5.3.4 Module d'Emission
Le module d'Emission permet de transmettre une trame de
donnée par la liaison série suivant notre protocole
imposé. Ce module fonctionne comme suit :
La trame de donnée à émettre est
stockée dans Data_tx, le changement d'état du signal Begin_tx
représente le début de l'envoie et celui du End_tx
représente la fin de transmission (figure 5-6).

Figure 5-6 : Module de
l'Emission.
tx_d <= tx_data;
if begin_tx = '1' then
if tx_cnt = 0 then -- start bit
tx <= '0';
elsif tx_cnt < 9 and tx_cnt > 0 then
tx <= tx_d (0);
tx_d (6 downto 0) <= tx_d (7 downto 1);
tx_d (7) <= '0';
elsif tx_cnt(3 downto 0) = 9 then -- stop bit
tx <= '1';
tx_cnt<= (others =>'0');
end_ tx <= '1';
Le module d'émission permet donc de transformer
l'information parallèle en information série (Figure
5.7).
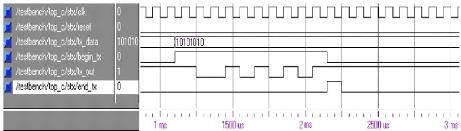
Figure 5-7 : Simulation de
l'Emission. 5.3.5 Module de Réception
Ce module permet la réception d'une trame de
données. Il est composé de 4 entrées (Clk, Reset, Divisor
et Data_rx) et 2 sorties (Rx_out et End_rx).
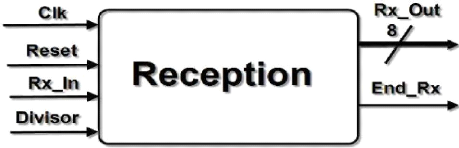
Figure 5-8 : Module de
Réception.
Sur le chronogramme ci-dessous, on observe que la
réception commence lorsque Rx_in passe à 0 (bit de Start). End_rx
représente la fin de la réception. L'information est
stockée dans Rx_out.
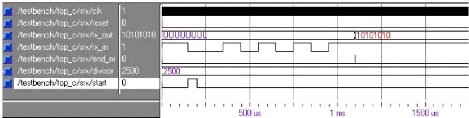
Figure 5-9 : Simulation du module
de réception.
5.3.6 Simulation de Vérification
Pour vérifier le fonctionnement de notre code, on
réalise la simulation suivante : on envoie une trame de donnée
''10101010'' sur Rx, lorsque la réception est achevée,
l'information est mémorisée dans Data_rx et End_rx est
passée à `1' pour déclencher l'entrée Begin_tx. Le
passage à `1' de cette dernière provoque la transmission de la
trame stockée (figure 5.10). Après l'émission, End_tx
passe à `1' et Begin_tx revient à `0'.
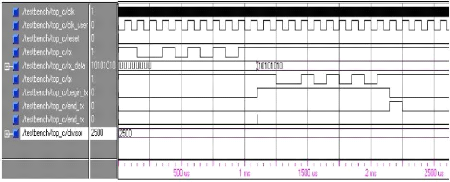
Figure 5-10 Simulation du module
top.
5.4 Interface graphique
5.4.1 Test de l'Emission et de la Réception
Pour commencer, on a réalisé une interface
primaire qui permet d'introduire un caractère du clavier, ce dernier
sera émis par le port série RS232 à la carte SPARTAN-3
où il sera traité puis reçu par la même liaison, le
même caractère qui a été transmis doit
apparaître de nouveau dans la deuxième case de la figure 5-11 pour
que l'utilisateur soit certain de l'exactitude de son information
véhiculée.

Figure 5-11 : Interface
Emission-Réception.
Cette interface est fonctionnelle mais pas suffisante pour
effectuer le test de l'instrument XI214, il doit y avoir une
amélioration au niveau de l'interface elle même et des options
disponibles à l'utilisateur.
5.4.2 Vitesse de transmission
Une communication nécessite obligatoirement une
vitesse de transmission pour la synchronisation, donc il faut un moyen qui
permet de la contrôler et de la varier. La figure 5-12 montre le plus qui
a été ajouté à l'interface précédente
qui consiste à la partie réservée au Baud et qui doit
être validé par l'utilisateur.

Figure 5-12 :
Emission-Réception avec Variation du baud.
L'interface est de plus en plus améliorée, mais
pour que le travail ait plus de valeur il faut arriver a faire une simulation
réelle du fonctionnement de l'instrument XI214 c'est-à-dire qu'il
faut réaliser une autre interface qui réagit de la même
façon et au même temps que l'instrument réel.
5.4.3 Réalisation du VOR/ILS
:
La description de l'instrument de bord d'avion à
tester, représentée dans la figure 5-13, est le VOR/ILS XI214. Il
est sous la forme d'un compteur de voiture à deux aiguilles de plus il'
contient 4 indicateurs FROM, TO et les deux FLAG.

Figure 5-13 : Indicateur
KI214.
L'interface graphique finale permet la commande et la
supervision de l'instrument : Ø Commande de l'instrument
La commande de l'instrument est effectuée par le choix
de la vitesse de transmission et du caractère à émettre,
cette tâche ne demande pas une grande connaissance ni de l'instrument ni
de l'interface puisque l'utilisateur est guidé dans chaque partie par
des commentaires, il n'a qu'il sélectionner une valeur du Baud parmi la
liste proposée.

Figure 5-14 : Liste des valeurs
de Bauds autorisées.
Après le choix effectué, la case suivante lui
indique la vitesse de transmission actuelle et elle suit toujours le changement
du Baud effectué par l'utilisateur

0 Supervision
Après avoir choisi la vitesse de transmission,
l'utilisateur introduit le caractère à émettre qui sera
traité par la carte d'acquisition SPARTAN-3, cette dernière
commande l'instrument, la même variation qui en résulte et qui
affecte notre KI214 sera la même sur notre interface graphique qui est
représentée par la figure 5-15.

Figure 5-15 : Interface
graphique.
5.5 Réalisation pratique du test du
KI214
Les étapes à suivre pour effectuer un test de
l'instrument KI214 sont les suivantes :
0 Il faut tout d'abord connecter la carte SPARTAN-3 avec
l'ordinateur par le câble RS232 et le câble qui permet
l'implantation du code, bien sur la mise sous tension de la carte est
nécessaire.

Figure 5-16 : Schéma du
câblage de la carte SPARTAN-3.
1 : câble série RS232
2 : câble d'implantation du code source
3 : câble d'alimentation
m Utiliser le logiciel XILINX pour charger le projet, le
compiler puis l'implanter dans la carte d'acquisition. Si cette étape
est réalisée comme il le faut, ce logiciel nous signale que
l'opération est effectuée avec succès.
m On passe à l'étape suivante qui consiste
à suivre le schéma indiquant les différents pins de
l'instrument KI214 qui sont utilisables. [2]

Figure 5-17 : PINs de
l'indicateur KI214.
0 A travers la maquette de test, connecter les pins du XI214
pour avoir des points de mesure et de connexion.
0 Effectuer la même tâche
précédente avec la carte SPARTAN-3 c'est-à-dire relier les
sorties déjà programmées avec les pins convenables de
l'instrument à travers la maquette de test, on aura alors un montage
complet prêt pour la mise en marche (Figure 5-18).

Figure 5-18 : Connexion
SPARTAN-3/Indicateur XI214.
Ø finalement la commande et la visualisation seront
totalement assurées par l'interface en VISUAL BASIC.
4.5.1 Etapes de test
1. L'état initial de l'instrument est lorsque les
deux aiguilles sont perpendiculaires et les deux indicateurs du FLAG prennent
la couleur rouge signalant un problème ou un manque d'alimentation comme
l'indique la figure 5-19.

Figure 5-19 : Etat initial de
l'instrument KI214.
2. Le test commence lorsque l'utilisateur introduit un
caractère choisi selon le tableau suivant :

Figure 5-20 : Boutons de commande
de l'instrument.

Tableau 5-2 : Caractères
à émettre
3. L'utilisateur parvient à
voir un changement dans l'indicateur KI214 et aussi dans l'interface graphique
ce qui lui permet de juger l'état de son instrument qui peut prendre
l'une des allures suivantes :

Tableau 5-3 : L'évolution
Le l'interface au cours Le test
5.6 Conclusion
Dans ce chapitre, on a réalisé la
procéLure Le test Le l'instrument Le borL L'avion en utilisant la carte
SPARTAN-3 comme carte L'acquisition. Ce test est simulé sur l'orLinateur
par l'interméLiaire Le l'interface réalisée VB.
Conclusion générale
Nous sommes partis à l'origine d'une demande faite par
l'IMA (Institut de la Maintenance Aeronautique de Bordeaux) désireuse de
se doter d'un système lui permettant d'effectuer la procédure de
test des instruments de bord d'avions.
Suite à un effort considérable durant la
période du projet, nous sommes arrivés à un stade final,
qui nous permet d'aboutir aux trois parties suivantes :
· La mise en évidence de notre premier contact
avec les avions précisément avec leur tableau de bord et ses
différentes composantes ainsi que la description de l'instrument 7(I214
sujet de notre application désirée.
· Le développement d'une procédure de
test de l'instrument 7(I214 suivant une norme de transfert de données
à travers le câble RS232 afin d'examiner ses performances avant
son montage dans l'avion.
· La mise au point d'une interface graphique assurant
une supervision et une commande souple permettant à l'utilisateur de
communiquer aisément avec son système.
C'est là que réside la valeur d'un tel projet
de fin d'année qui marie les exigences de la vie professionnelle aux
cotés bénéfiques de l'enseignement pratique que nous avons
eu à l'IIA et l'UNAT.
Malgré les résultats satisfaisants obtenus, ce
travail peut être enrichi ou même une
partie d'un grand projet. En effet, pour cette promotion
l'IMA envisage de réaliser un simulateur de vol contenant les
mêmes instruments de bord d'un avion réel, ça sera un
avantage d'analyser toutes ces composantes par un même
procédé pouvant être basé principalement sur notre
protocole de communication.
Bibliographie
[1] Mohamed GHARBI, «Cours de Radionavigation»,
UNAT.
[2] «User guide KI 208/209», Bendix-King, 1979, 30
pp.
[3] «SPARTAN-3 Starter Kit Board User Guide»,
XILINX, 2004, 63pp.
[4] «Karen PARNELL and Nick MEHTA, Introduction to
Programmable Logic», XILINX, 2004, USA, 192 pp.
[5] «Abederrahim FADIL, «VISUAL BASIC 6 les bases
du développement», Ellippes, 2004, France, 300pp.
[6] Edoardo BASILICO,«Guide méthodologique de
conception et de validation de systèmes réactifs», 2002,
Suisse, 72 pp.
Annexe 1

I-214 Indicador
FEATURES
· VOR indicator designed to operate with VHF
navigation equipment such. as 10C-1.70 and 175 series radios to provide OMNI
(VOR) or LDO TFR (LOC) information
n Converts omni ar localizer information to dc siraals
to drive LEFT-RIGHT needle and TO-OFF-FROM flag
§ Also contains 40 channel GLIDESLOPE receiver and
UP-DOWN GLIDE needle with an OFF warning flag
SPECIFICATIONS
'Weight: 3.0 lbs. (approx.}
Dimensions:
3.25"W x 3251-I 8.71"L (9_J1"H for Sill 5400
and up)
Input Impedence
301E ohms, winkled Input Level
-01 L J: '0R1LOC
:
Locali er Centering:
ithin#177;l0% of standard deflection
Localizer Sensitisity:
LOC:0.35\
·'RMS: VOR: t]_50VRMS
4-db tone ratio wil I give full scale
deflection
Omni. Areauacs-:
dg °mni Seasiti its-:
+-10 deg_ of course width gives full scale
deflection
External Load: High Z Autopilot
S€nsitisit-- (S): I 4Ouv hard for half
flag
evialion and 60% of standard
Annexe 2


Annexe 3
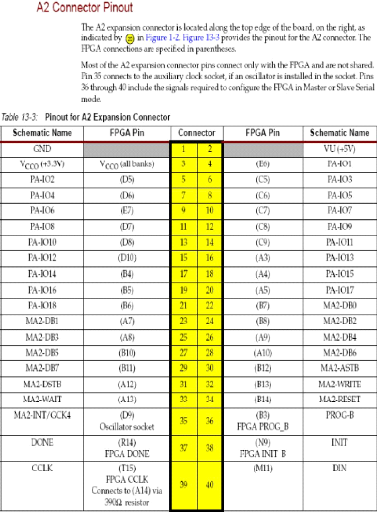
|
Mots clés : Aéronautique. Norme RS232, SPARTAN3,
VHDL, Visual Basic.
Résumé : Durant ce projet. nous avons pu
effectué la mise au point de la procédure permettant de tester un
instrument de bord d'avion choisi d'avance. En premier lieu. on a
utilisé la carte SPARTAN-3 comme carte d'acquisition et en second lieu.
on a eu recours au logiciel Visual Basic pour concevoir l'interface graphique
de communication entre l'ordinateur et la carte d'acquisition.
|
|
Keys words: Aeroimutical. RS232 Nortn. SPARTAN3. VHDL. Visual
Basic,
Abstract: During this project. we made the procedure allowing
us to test an instrument of the front panel of the plane that had been chosen
before. First we used the SPARTAN3 as an acquisition card: secondly we realized
a graphical interface based on the software Visual Basic.
|
Initial Model 737s (-100/-200)
The Boeing 737 is the best-selling jetliner fleet in
the world. Much of the credit for this achievement belongs to the 737-200,
which accounted for 1,114 of all 737s ordered.

Initial Model 737s (-100/-200)
Unlike other early twinjets, the 737 featured engines
mounted in pods beneath the wings, making it easy to service.

Initial Model 737s (-100/-200)
The Beginning of the World's Most Popular Jet
Family
The first flight of the Boeing 737-100 occurred April
9, 1967. With pilots Brian Wygle and Lew Wallick at the controls, the airplane
took off from Boeing Field in Seattle and flew for 2-1/2 hours before landing
at Paine Field in Everett, Washington. The 737 was designed as a logical short-
range airplane to complement larger 707 and 727 jetliners. The 737 was
certified by the U.S. Federal Aviation Administration in December 1967 after
more than 1,300 hours of flight testing by a six-airplane fleet. For the first
time, certification included approval for automatic approaches in bad weather
under Category II conditions -- defined as 100-foot ceilings and 1,200-foot
forward visibility. The first 737-100 was delivered to Lufthansa December
28,1967, and began commercial revenue service on February 10, 1968. The last
737-100 model was produced in 1969 and delivered in November that same year.
Interestingly, the last 737-100 delivered was actually the first 737 Boeing
produced. The aircraft had been used by Boeing as a test airplane before being
delivered to NASA on July 26, 1973, for use as a test and training aircraft by
the space agency. Boeing delivered 30 737-100s.

Classic 737s (-300/-400/-500)
Entering service as deregulation made air travel
increasingly competitive, the 737-300 quickly rose to prominence for
hub-and-spoke and point-to-point operations

Classic 737s (-300/-400/-500)
As a replacement for 737-200s, the forward-looking
737-300 offered more seats, better performance and fuel economy, and much
lower noise.

Classic 737s (-300/-400/-500)
Airlines count on the 737's rapid turn-around: it
allows ground crews to handle passengers, luggage, food and beverages, and
clean-up quickly and easily, so that each plane can be scheduled for more
flights per day.

Classic 737s (-300/-400/-500)
The common flight deck of the pilot-centered 737-300,
-400, -500 incorporates digital technology like that on the 757/767 family.
These electronics systems provide concise flight information, which allows
increased fuel efficiency and reduces the crew's workload when landing the
airplane in bad weather.

Classic 737s (-300/-400/-500)
Offering 18 more seats than the 737-300 in typical 2-class
configurations, the 737-400 also offers charter and tour operators
seating for up to 168 passengers

Classic 737s (-300/-400/-500)
Together with the 737-300 and 737-500, the 737-400
delivered unmatched reliability.

Classic 737s (-300/-400/-500)
Although it has the largest model designator of its
generation, the 737-500 is actually smaller than either the 737-300 or
the 737-400.

Classic 737s (-300/-400/-500)
Designed as a family, all three models of the current
(second) generation of 737s are built simultaneously.
Classic 737s (-300/-400/-500)
Only 10 inches longer than the earlier 737-200, the
737-500 uses 20% less fuel and has the longest range capability of the
three models in the second-generation 737 family.

Boeing Launches New Higher Capacity, Longer Range
737
Boeing officially launched the 737-900ER following the
completion of a sales agreement for up to 60 airplanes to Indonesias first
low-cost carrier, Lion Air. The new 737-900ER, formerly the 737-900X, becomes
the newest member of the Next-Generation 737 family. The 737-900ER features
aerodynamic and structural design changes, which allows the derivative to
accommodate higher takeoff weights, carry 26 more passengers and fly farther
than the 737-900.

Boeing Unveils Next-Generation 737 with Dynamic 787
Livery
Boeing today unveiled in Seattle an Air Berlin
Next-Generation 737-700 carrying the dynamic blue and white livery previously
shown only on the all-new Boeing 787. This 737 will anchor marketing activities
involving Boeing and Air Berlin, details of which will be provided at the July
Farnborough Air Show, and allow Boeing to showcase the technologically advanced
Next-Generation 737 in an exciting way. Boeing painters used innovative
painting techniques from the automotive industry to create the unique color
scheme. Air Berlin takes delivery of the 737 later this month.

Next Generation 737s
(-600/-700/-800/-900)
The smallest member of the Next-Generation 737 airplane
family -- the 737-600 -- made its first flight today, with Boeing
Capts. Mike Carriker and Ray Craig at the airplane's controls. The 102-foot,
6-inch airplane took off from Renton Municipal Airport in Renton, Wash., at
10:16 a.m. PST. This newest 737 model, launched by Scandinavian Airlines (SAS),
is equivalent in size to the 737-500, and provides seating for 110 to 132
passengers.

Next-Generation 737s
(-600/-700/-800/-900)
Boeing employees in Renton, Wash., prepare to fasten wings of
the first Boeing 737-900 to the 124-foot-long (37.8 meter) body
section. The 737-900 is the longest of the Next-Generation 737s, and will be
able to seat up to 189 passengers in a one-class configuration. Next-Generation
737s are the newest, most advanced-design airplanes in their class, and feature
an improved wing design that allows the airplanes to fly higher than competing
Airbus A320 airplanes. A higher maximum cruising altitude means passengers can
enjoy a smoother ride and airlines benefit by being able to fly above bad
weather, congested routes and less capable airplanes.

Next-Generation 737s (-600/-700/-800/-900) Champions:
Boeing 737-900 Makes World Premier
Symbolizing the spirit of launch customer Alaska Airlines,
Iditarod sled-dog race champion Doug Swingley and his team escort the first
Boeing Next-Generation 737-900 out of the factory for its world
premiere. Boeing and Alaska Airlines and employees cheered the airplane at a
rollout celebration in Renton, Wash. The Boeing 737-900 is the newest Boeing
commercial jetliner and the largest model in the Next-Generation 737
family.

Next-Generation 737s
(-600/-700/-800/-900)
The first Boeing Next-Generation 737-900 takes off on
its maiden flight, heading over Lake Washington near Seattle. The flight, which
lasted three hours, marked the start of a six-month 737-900 flight-test
program. The 737-900, largest of the Next-Generation 737 models, was first
ordered by Seattle-based Alaska Airlines. KLM Royal Dutch Airlines, Korean
Airlines and Continental Airlines also have ordered the model.

Next-Generation 737s (-600/-700/-800/-900)
Next-Generation 737 Flight Deck
The Next-Generation 737 flight deck is equipped with
industry-leading display and flight management software that promise to reduce
flight delays, and enhance safety and flight crew efficiency. These
technologies include Vertical Situation Display, which shows the current and
predicted flight plath of the airplane and indicates potential conflicts with
terrain, and the Head-Up Display (HUD) which provides pilots with "eye-level"
flight and safety information.

Next-Generation 737s (-600/-700/-800/-900)
Next-Generation 737 Production
Next-Generation 737s line up nose-to-tail on a moving
production line, speeding along at a rate of two inches a minute through the
final assembly process. The moving line, one of several Lean Manufacturing
tactics used at the Renton, Wash., facility, has enhanced quality and reduced
flow time and inventory levels.

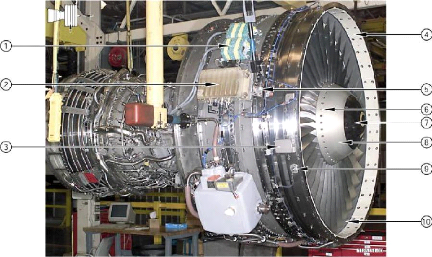
0
CFM56-3 TRAINING MANUAL
CFM56-3 TRAINING MANUAL
COMPONENT IDENTIFICATION
|
ITEM
NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
8
|
Rear Spinner Cone
|
7
|
Elliptical shape prevents ice formation
|
|
10
|
Abradable Liner
|
6
|
Balance the low pressure system
|
|
9
|
Ps12 Sensing Port {A}
|
3
|
Supplies engine serial number, thrust rating and takeoff
rating
|
|
3
|
Engine Data Plate
|
1
|
Supplies high voltage power to the igniters
|
|
6
|
Balance Screws
|
4
|
Supplies sound suppression
|
|
4
|
Forward Acoustical Panel
|
9I}
|
Prevents direct contact of fan blade into the case during engine
operation
|
|
Ignition Exciter (2)
|
2
|
Electronic over-ride of the MEC
|
|
2
|
Power Management Control (PMC)
|
g
|
Static air pressure from static port to Ps12 manifold
|
|
5
|
T12 Fan Inlet Sensor (stowed)
|
5
|
Fan inlet temperature to PMC
|
|
7
|
Front Spinner Cone
|
8
|
Axial retention of fan blades and provision for balance screw
placement
|
|
|
|
|
|
|
|
|
tf CFM56-3 TRAINING MANUAL
COMPONENT IDENTIFICATION
Msrr
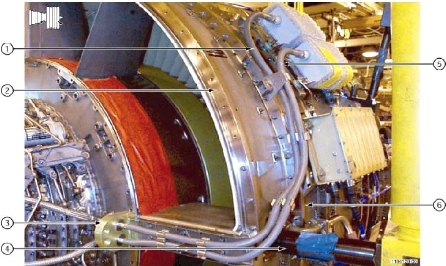
|
ITEM
NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
2
|
Fan Frame
|
1
|
Transmits high voltage from the upper exciter to the 6 o'clock
igniter
|
|
1
|
Left Hand Ignition Lead
|
3
|
Supplies cooling air to the right and left ignition lead
conduit for lead coaling
|
|
3
|
Air Manifold
|
6
|
Front section shouldered to give fan blade containment
|
|
6
|
Fan Case
|
2
|
1 of 2 main engine structural frames
|
|
5
|
Right Hand Ignition Lead
|
4
|
Used for engine lifting
|
|
4
|
Front Lifting Trunnion
|
5
|
Transmits high voltage from the lower exciter to tie 4 o'clock
igniter
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE. ACCESSORY CR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY OR
COMPONENT
|
|
7
|
Visual Oil Quantity Window
|
6
|
Supplies oil overflow containment during servicing
|
|
4
|
Oil Tank Anti-Siphon Line
|
4
|
Prevents oil tank siphoning alter engine shutdown
|
|
6
|
Oil Scupper
|
1
|
To support the engine on the ground
|
|
1
|
Fan Frame Ground Handling Mount (Right Hand)
|
2
|
To balance internal sump pressures
|
|
5
|
Gravity Fill Oil Cap
|
7
|
Supplies visual inspection of oil tank service limits
|
|
2sampling Oil Tank Vent Line
|
|
Seals oil tank and allows for servicing and oil
|
|
3
|
Oil Tank Quantity Transmitter
|
3
|
Transmit oil tank quantity to flight deck
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
3
|
Oil Tank Pressure Fill and Overflow Ports
|
1
|
Supplies Ni speed signal to PMC and flight deck
|
|
2
|
Oil Scavenge Return Line
|
4
|
Supplies oil from ail tank to lube unit pressure pump
|
|
5
|
Oil Tank
|
5
|
Storage of engine lubrication oil
|
|
4
|
Lube Unit Supply Line
|
2
|
Supplies scavenge oil return from servo heater to oil tank
|
|
1
|
N1 Speed Sensor
|
3
|
Supplies remote pressure servicing of the oil tank
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY CR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY OR
COMPONENT
|
|
4
|
An Acoustical Panel
|
5
|
Cooling of CSD/IDG oil
|
|
2
|
Mid Acoustical Panel
|
2
|
Sound Suppression
|
|
5
|
CSDIIDG Oil Cooler Pad
|
3
|
Air directed to the aircraft generator for cooling
|
|
3
|
Generator Cooling Inlet
|
4
|
Sound suppression
|
|
t
|
Outlet Guide Vanes (80)
|
1
|
Points tan discharge air flow in a straight path
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
6
|
Alternate Vibration Sensor Pad
|
F
|
Supplies HPC bleed air to the HPT shroud to increase engine
efficiency
|
|
8
|
T2.5 (UT) Sensor (Inside Frame)
|
8
|
Supplies compressor inlet temperature to MEC
|
|
5
|
Air Ignition Tube
|
2
|
Supplies static rigging of variable stator vane actuator to the
system
|
|
High Pressure Turbine Clearance Control Valve7 (HPTCCV)
|
1
|
Ignite fuel/air mixture and BSI port 516
|
|
2
|
VSV Actuator Rig Pin Hole (Right Side)
|
4
|
Connects No. 1 bearing vibration sensor with aircraft
|
|
4
|
Electrical Connector, Bearing Vibration Sensor
|
3
|
To connect each VSV actuation ring
|
|
1
|
Igniter - Lower Right Hand Side Combustor Case
|
8
|
Alternate No_ 1 bearing vibration sensor mounting pad
|
|
3
|
VSV Actuation Connecting Links
|
5
|
Supplies cooling air from the booster to the air manifold
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
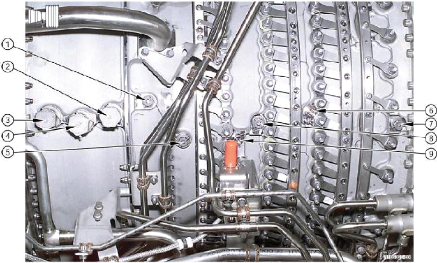
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
2
|
Bore scope Port S7
|
3
|
BS/ stage 8 trailing edge and stage 9 leading edge HPC
|
|
3
|
Borescope Port S9
|
1
|
BSI stage 5 trailing edge and stage 6 leading edge HPC
|
|
Bores-cope Port S6
|
2
|
BSI stage 6 trailing edge and stage 7 leading edge HPC
|
|
6
|
Borescope Port S3
|
6
|
BSI stage 1 trailing edge and stage 2 leading edge HPC
|
|
7
|
Borescope Port S1
|
7
|
BS/ !CV and leading edge stage 1 HPC
|
|
5
|
Borescope Port S5
|
8
|
BSI stage 2 trailing edge and stage 3 leading edge HPC
|
|
6
|
Borescope Port S2
|
5
|
BSI stage 4 trailing edge and stage 5 leading edge HPC
|
|
g
|
Borescope Port S4
|
9
|
BSI stage 3 trailing edge and stage 4 leading edge HPC
|
|
4
|
Bore scope Port 58
|
4
|
BSI stage 7 trailing edge and stage 8 leading edge HPC
|
|
|
|
|
|
|
|
|
|
|
|
|
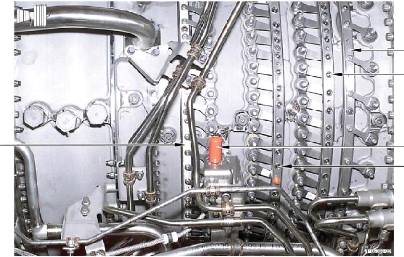
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY CR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
2
|
IGV Actuation Half Ring
|
5
|
Stage 2 VSV scheduling
|
|
1
|
Stage 3 Actuation Half Ring
|
4
|
Connects turbine frame bearing vibration sensor to aircraft
|
|
5
|
Stage 2 Actuation Half Ring
|
2
|
IGV angle scheduling
|
|
3
|
Stage 1 Actuation Half Ring
|
1
|
Stage 3 VSV scheduling
|
|
4
|
Electric Connector, Bearing Vibration Sensor
|
3
|
Stage t VSV scheduling
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
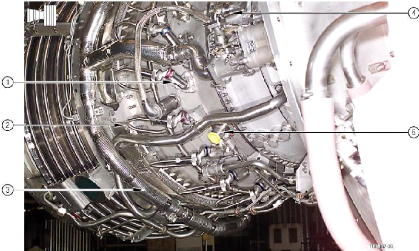
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY OR
COMPONENT
|
|
1
|
Fuel Nozzle (20}
|
1
|
Supplies fuel to the combustion chamber
|
|
2
|
Shrouded Fuel Manifold
|
4
|
Supplies stage 9 bleed air to the HPTCCV
|
|
4
|
HPC Stage 9 Bleed Tap
|
2
|
Supplies fuel to the fuel nozzles
|
|
5
|
Bleed Bias Sensor (C BP)
|
5
|
Senses use of customer bleed air
|
|
g
|
HPTCCV Discharge Manifold
|
3
|
Supplies stage 5, stage 9, or mixed bleed air to HPT shroud
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
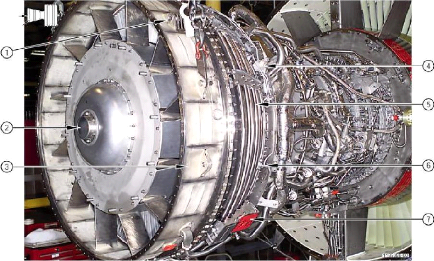
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY OR
COMPONENT
|
|
3
|
Turbine Frame
|
5
|
Supplies fan discharge air to LPT Case for cooling
|
|
7
|
Distribution Box LPT Case Gaoling
|
2
|
Prevents flame propagation in the center vent tube
|
|
5
|
LPT Case Cooling Manifold
|
1
|
Supports the engine on the ground
|
|
1
|
Turbine Frame Ground Handling Mount
|
|
Supplies fan discharge air to LPT case cooling manifold
|
|
2
|
Flame Arrestor
|
4
|
Connects EGT system to flight deck indicator
|
|
4
|
T4.95 (EGT) Junction Connector
|
3
|
Second structure frame of engine
|
|
6
|
T4.95 (EGT) Thermocouple Probes (9)
|
6
|
Sense exhaust gas temperature
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NC.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY OR
COMPONENT
|
|
I
|
Borescope Port S22
|
2
|
Scavenge return of oil from aft surnp to Tube unit
|
|
2
|
Aft Sump Oil Scavenge Line
|
|
BSI stage 3 leading edge and stage 2 trailing edge LPTR
|
|
5
|
Borescope Port 517
|
3
|
Supplies oil to aft sump frarri lube unit
|
|
3
|
Aft Sump Supply Line
|
|
BSI HPTR trailing edge and stage 1 LPTR leading edge
|
|
4
|
Borescope Port 521
|
I
|
BSI stage 4 leading edge and stage 3 trailing edge LPTR
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY CR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY OR
COMPONENT
|
|
4
|
Low Pressure Turbine Stator Case
|
3
|
Supplies stage 5, stage 9, and mixed bleed air to the HPT
shroud
|
|
2
|
HPC Stage 9 Bleed Port (4)
|
8
|
Support the HPT shrouds in the HPTR area
|
|
9
|
HPC Stage 5 Bleed Manifold (4) LPT Stage 1 Coaling
|
2
|
Stage 9 customer bleed air
|
|
8
|
HPT Shroud Support
|
1
|
Supplies fuel to left hand side no77ies
|
|
1
|
Fuel Manifold (Left Hand Side)
|
5
|
Connect EGT system to flight deck indicator
|
|
5
|
T4.95 (EGT) Junction Connector
|
|
Transmits vibration signal from the turbine frame sensor to
connector
|
|
7
|
Turbine Frame Vibration Sensor Cable
|
4
|
Enclose the four LPT stages
|
|
3
|
HPTCCV Discharge Manifold
|
|
Supplies stage 5 bleed air for stage T LPT nozzle cooling
|
|
6
|
Barescope Port 518
|
8
|
BSI HPTR trailing edge and stage 1 HPTR leading
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY CR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY OR
COMPONENT
|
|
3
|
Lett Hand Ignition Lead
|
5
|
Stage 5 customer bleed air
|
|
1
|
HPC Stage 5 Start Bleed Valve
|
8
|
Supplies fuel to the combustion chamber
|
|
6
|
Igniter--Lower Left Hand Side Combustion Case
|
3
|
Transmits high voltage from the upper exciter to the 8:00
igniter
|
|
a
|
Fuel Nozzle (20)
|
2
|
Supplies start air pressure to the HPC stage 5 start bleed
valve
|
|
4
|
CDP (1333) Tap and Signal Line
|
6
|
Ignites the fuel/air mixture and 531 Port 511
|
|
5
|
HPC Stage Bleed Port (3)
|
1
|
Aerodynamically unloads the HPC during start
|
|
7
|
combustion Case
|
4
|
Transmits the compressor discharge pressure signal to the MEC
|
|
2
|
Air Signal Start Bleed Tube
|
7
|
Contains the combustion chamber
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY OR
COMPONENT
|
|
-1Master
V BV Bal! Screw Actuator { 1 l
|
q
|
Changes the VBV fuel gear motion into VBV linear rotational
motion
|
|
3
|
Fan Duct Pane!
|
2
|
Supplies by-pass of primary airflow into the secondary airflow
|
|
2
|
Variable Bleed Valve (12)
|
3
|
Points airflow from the booster through the open VBV doors to the
fan by-pass air
|
|
6
|
VBV Stop Mechanism
|
6
|
Controls the range of movement of the VBV fuel gear motor
|
|
4
|
Kicker Stop
|
5
|
Transmits VBV master ball screw position to feedback cable
|
|
5
|
Feedback Rod Clevis
|
4
|
Supplies a stop for the free lever
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
4
|
Return Lever
|
1
|
Uses fuel pressure to turn the motor drive, which opens or closes
the VBVs
|
|
2
|
VBV Feedback Cable Rod End Bearing
|
3
|
Supplies a biased feedback signal to the MEC to further open VBV
doors
|
|
3
|
Free Lever
|
|
Transmits rod end fuel pressure from the MEC to the VSV
actuator
|
|
6
|
VSV Rod End Pressure Line
|
5
|
Transmits head end fuel pressure from the MEC to the VSV
actuator
|
|
5
|
VSV Head End Pressure Line
|
2
|
Adjusts the length or the VBV feedback cable during the travel
check
|
|
1
|
VBV Gear Motor
|
4
|
Returns the VBV to the normal MEC schedule
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
6
|
T Signal Line
|
6
|
Carmes Pb or Pcü fuel pressure from the MEC to
the HPTCCV 9 stage valve
|
|
4
|
Idle Solenoid
|
-.
|
Carries Pb or Pc fuel pressure from the MEC to the HPTCCV
5i stage valve
|
|
3
|
TC3 Signal Line (-3132/-3C only]
|
5
|
Drains oil from the forward sump seal cavity to overboard
|
|
5
|
Cavity Drain
|
2
|
Carries fuel pressure from the MEC to the VSV actuators to
open the VSVs
|
|
2
|
VSV Rad End Pressure Line
|
4
|
Electrically supplies flight and ground idle (high and low
idle) by the aircraft's flight condition
|
|
9
|
VSV Head End Pressure tine
|
1
|
Carries fuel pressure from the MEC to the VSV actuators to
close the VSVs
|
|
7
|
TG1 Signal Line
|
|
Signal pressure to the timer solenoid during a takeoff with n2
larger than 95%
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
5
|
Electric Connector
|
5
|
Transmits PLA from the MEC to the PMC and transmits the TMC from
the PMC to the MEC
|
|
6
|
VSV Feedback Cable
|
4
|
To rig the position of the pointer with the VSV ng notch
|
|
1
|
Pb Pressure Line
|
|
To rig the position of the pointer with the VBV rig notch
|
|
7
|
VBV Feedback Cable
|
|
1sensor
Cames Pb (low) pressure from the CIT (T25) to the MEC
|
|
4
|
Adjustment Screw VSV Feedback Cable
|
2
|
Carries P6 (high) pressure from the MEC to the CIT (T25)
sensor
|
|
2
|
P6 Pressure Line
|
7
|
Indicates VBV door position to the MEC
|
|
3
|
Adjustment Screw VBV Feedback Cable
|
6
|
Indicates VSV position to the MEC
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
10
|
Oil Scavenge Return Line
|
12
|
Transmits flight deck throttle demand to the MEC
|
|
4
|
Oil Scavenge Line
|
8
|
Supplies static rigging procedure of the VSV actuator ta the
system
|
|
8
|
VSV Actuator Rig Pin Hole (Left Side)
|
11
|
Supplies positive fuel ON/OFF selection
|
|
g
|
VSV Actuator (Left Side)
|
1
|
Supplies fuel from the servo fuel heater to the MEC
|
|
3
|
VBV Open Part Line
|
|
Fuel pressure from the MEC to the rod end or the head end
actuates the VSV system
|
|
12Power
Lever
|
10
|
Supplies scavenge oil return from the servo heater to the oil
tank
|
|
11
|
Fuel Shutoff Lever
|
7
|
Holds all servo mechanism lines
|
|
5
|
Full Reverse Power Lever Stop
|
6
|
Supplies stoppage for the power lever at its
130-degree stop (non-adjustable)
|
|
-1
|
Fuel Supply Line
|
5
|
Supplies mechanical stoppage for the power lever
(non-adjustable)
|
|
7
|
9 O'clock Tube bundle
|
|
Supplies oil from the scavenge tiller to the servo Mel heat
exchanger
|
|
2
|
VBV Close Port Line
|
3
|
Supplies fuel from the MEC ta the VBV motor to open the
VBVs
|
|
6
|
Full Forward Power Lever Stop
|
2
|
Supplies fuel from the MEC to the VBV motor to close the
VBVs
|
|
cp
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
6
|
LP Fuel Pump Screen Assembly
|
tp
|
De-ices the servo fuel by convection transfer of heal from the
scavenge ail
|
|
1D
|
Servo Fuel Heater
|
8
|
Transmits power from the 1GB to the AGB for the accessories
|
|
8
|
Transfer Gearbox
|
3
|
Supplies gear drive for the accessories
|
|
4
|
Main Fuel/Oil Heat Exchanger
|
6
|
Gives access to the LP stage impeller for verification of
rotation
|
|
9
|
Fuel Supply Heater Tube
|
t
|
Supplies vent air from AGB ta the forward sump. & protects
horizontal drive shaft
|
|
6
|
Pb Pressure Line {-3B21-3C only}
|
9
|
Transmits fuel from the pump to the servo healer
|
|
7
|
Fuel Pump
|
|
Two-stage pump that supplies fuel pressure and drive far the
MEC
|
|
2
|
Fuel Supply Line
|
5
|
Pb supply to the timer and timer solenoid valve from the fuel
pump
|
|
1
|
Horizontal Drive Shaft Housing
|
2
|
Transmits fuel from the MEC to the fuel flow meter
|
|
g
|
Accessory Gearbox
|
4
|
Cools the engine oil through convection transfer of heat from
the oil to the fuel
|
|
17
|
Main Engine Control (MEC)
|
7 7
|
Supplies schedule fuel for combustion and servo operation
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY OR
COMPONENT
|
|
6
|
Forward Sump MCD
|
g
|
Collects and filters metallic and non-metallic particles from the
AGBITGB sumps
|
|
2
|
Lube Supply Filter
|
|
Supplies one supply pump and three scavenge pumps for oil
circulation
|
|
3
|
PS12 Signal Line
|
|
Supplies scavenge oil from the lube unit to the scavenge
filter element
|
|
4
|
Oil Scavenge Line
|
|
Collects and fillers metallic and non-metallic particles from the
all sump
|
|
5
|
Lubrication Unit
|
3
|
Supplies static air pressure from the PS-12 manifold
to the MEC
|
|
g
|
AGB/TGB Sump MCD
|
t
|
Filters the fuel before the fuel flows to the high pressure
stage of the fuel pump
|
|
7
|
All Sump MCD
|
2
|
Filters the supply oil before the oil flows to the sumps
|
|
f
|
Fuel Filter
|
|
Collects and filters metallic and non-metallic particles from the
forward sump
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
5
|
AGB Drain Port
|
4
|
Supplies oil from the lube unit to the AGB
|
|
2
|
Lute Scavenge Filter
|
2
|
Filters the scavenge oil before the oil flows to the servo
heater
|
|
1
|
AGB Alignment Turnbuckle
|
5
|
Supplies drainage of the AGB sump
|
|
7
|
MCD Retention Bar
|
T
|
Supplies a positive lock of the MCD, and prevents partial
disengagement
|
|
4
|
Oil Supply Line
|
6
|
Connects the TGB to the AGB to supply oil scavenging
|
|
.3
|
Visual Gagging Indicator
|
1
|
Aligns the AGB for honzontal drive shaft installation
|
|
6
|
Oil Scavenge Line
|
3
|
Supplies a visual indication of the lube supply titter dogging
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
7
|
TS5 Pressure Line (-3B21-3C only)
|
3
|
Changes the operation of the HPTCCV during takeoff
|
|
1
|
P7 Pressure Line
|
2
|
Transmits Pb (low) pressure from the T2 sensor to the MEC
|
|
3
|
HPTCCV Timer (3B21 3C only)
|
7
|
Supplies output of Pc or Pb from the TCC timer to the TCC
valve to control stage 5 bleed*
|
|
4
|
HPTCCV Timer Lockout Solenoid (-3C only)
|
|
Supplies output of Pc or Pb from the TCC timer to the TCC
valve to control stage 9 bleed**
|
|
2
|
Pb Pressure Line
|
5
|
Controls the operation of the stage 5 valve of the TCCV (timer
disarmed)
|
|
5
|
TC1 Pressure Line (-3B2/ C only)
|
|
Weight-on-wheels sensing relay, airborne condition prevents TC3
fuel flaw to TCCV tinier
|
|
g
|
TS9 Pressure Line (-3B2f-3C only)
|
1
|
Transmits P7 (high) pressure from the MEC to the T2 sensor
|
|
|
|
|
|
|
|
*NOTE: Timer disarmed TS5 ports Tci fuel
pressure_
|
|
|
|
|
|
|
|
**NOTE: Timer disarmed TS9 ports Tc2 fuel pressure.
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
1
|
BellowsNalve Housing (T2)
|
6
|
Pc pressure holds the timer latching valve in the latched
position
|
|
7
|
Pb Pressure Line (-3b2f-3C only)
|
3
|
Controls the operation of the stage 9 valve of the TCCV (timer
disarmed)
|
|
4
|
only) hP~ CV Timer Adjustment Screw (-3132/-3C
|
7
|
Supplies low pressure for timer operation
|
|
6
|
Pc Pressure Line {621-3G only)
|
1
|
Changes the fuel pressure to the MEC with changes in inlet
temperature
|
|
3
|
T Pressure Line (-3621G only)
|
5
|
The timer starts its sequence when pressure indicates to
lock-out solenoid that N2 is 95%
|
|
2
|
T2 Sensor (Stowed)
|
|
Supplies the adjustment for the timer operation speed
|
|
5
|
TC3 Pressure Line {-3B2)-3C only)
|
2
|
Supplies the fan inlet temperature to the MEC
|
|
|
|
|
|
|
|
*NOTE: This lets the timer open one time each
engine cycle
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
4
|
Hand Cranking Pad
|
2
|
Drains to Overboard
|
|
2
|
Hydraulic Ptimp Pad Drain
|
1
|
Supports the hydraulic pump
|
|
1
|
Hydraulic Pump Pad
|
G
|
Drains to overboard
|
|
,
|
Starter and Nand Cranking Pad Drain
|
g
|
Drains to overboard
|
|
9
|
CSDIIDG Cavity Reservoir Standpipe Drain
|
5
|
Supports the air starter
|
|
5
|
Pneumatic Starter Pad
|
4
|
Lets the operator rotate the core during maintenance
|
|
7
|
CSDiIDG Pad
|
3
|
Transmits power to the PMC and flight deck N2 speed
indication
|
|
8
|
CSDJIDG Pad Drain
|
7
|
Supports the CSDfIDG
|
|
3
|
Contra) Alternator
|
|
Makes sure oil level of the CSDiIDG is normal during servicing
|
|
|
|
|
|
|
|
|
|
|
|
|

|
ITEM NO.
|
IDENTIFY THE
LINE, ACCESSORY OR
COMPONENT
|
ITEM
NO.
|
SELECT THE PURPOSE THAT MATCHES
THE LINE ACCESSORY
OR COMPONENT
|
|
2
|
Core Major Module
|
1
|
Contains the LPT rotor, LPT stator, LPT shaft,
and the LPT frame
|
|
3
|
Fan Major Module
|
3
|
Contains tanibooster, No. 1 and 2 bearing
support, IGB, No_ 3 bearing, fan frame, TGB and AGB
|
|
Low Pressure Turbine (LPT) Major Module
|
2
|
Contains HPC rotor & stators, combustor case & liner,
HPT nomme & rotor, and LPT nozzle
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| 

