2.2 L'approche optimiste
Cet approche est envisageable dans le cas où le leader
à la possibilité de persuader le suiveur de prendre une
décision qui lui sera favorable (favorable est compris ici au sens ou la
dite décision permet au leader d'atteindre son objectif).
la formulation optimistique de (2.2)-(2.3) est la suivante
:
min
y
{ }
?o(y) : y E Y
(2.6)
Où
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 23
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
{ }
?o(y) = min F(x,
y) : x E W(y) (2.7)
x
Définition 2.2.1. Un point (x*,
y*) E 1[8nx1[8m est appelé
solution optimiste locale de (2.2)-(2.3) si y* E
Y, x* E W(y*) avec
F(x*, y*) <
F(x, y*) Vx E
W(y*)
et il existe Uä(y*), 8 >
0 boule ouverte centrée en y* de rayon 8
telle que
?o(y*) <
?o(y) Vy E
Uä(y*) n Y
(x*, y*) est appelé
solution optimiste globale si 8 = o0
Énonçons maintenant un théorème
d'existence de solution optimiste :
Théorème 2.2.1. Si les assertions (C) et (MFCQ)
sont satisfaites en tout points (x, y) E 1[8n x Y
avec x E M(y), alors
Le problème (2.2)-(2.3) admet une solution
optimistique globale.
Preuve :
Considérons le problème
{ }
min F(x, y) : y E Y, x E
W(y) (2.8)
x,y
Les solutions globales de (2.8) et le problème optimiste
(2.4)-(2.6)-(2.7) coincident.
En effet si (x*, y*)
vérifie (2.8) alors (x*, y*)
vérifie (2.4)-(2.6)-(2.7).
réciproquement, si (x*, y*)
vérifie (2.4)-(2.6)-(2.7) alors par définition de solution
optimiste globale, on a :
F(x*, y*) <
F(x, y*) Vx E W(y)
et
?o(y*) <
?o(y) Vy E Y
{ }
F (x*, y*) < F
(x, y*) Vx E W(y*) =
F (x*, y*) < min F (x,
y*) : x E W(y*)
x
Or
{ } { }
?o(y*) <
?o(y)Vy E Y ? min
F(x, y*) : x E W(y*)
< min F(x, y) : y E Y, x E
W(y)
x x
{ }
Ce qui implique que min F(x, y*) :
x E W(y*) < F(x, y) Vy
E Y, Vx E W(y)
x
d'où F(x*, y*)
< F(x, y) Vy E Y, Vx E
W(y) autrement dit,
|
(x*, y*) E Argmin
x,y
|
{ }
F(x,y) : y E Y,x E
W(y)
|
donc (x*, y*) est optimum global
de (2.8).
D'autre part, puisque les assertions (C) et (MFCQ) sont
satisfaites, la fonction à valeur optimale
(voir définition 1.4.4) est continue ; ce qui permet de
montrer que l'ensemble
{ }
(x, y) : x E W(y) est fermé.
D'autre part, étant donné que Y est fermé,
l'assertion (C) nous
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 24
.
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
garanti que l'intersection de {(x, y) : x E Ø(y)} avec
Rn x Y est compact (comme fermé dans un compact).
D'où puisque F est continue sur Rn x
Rm, le problème (2.8) admet un optimum global. En vertu de
l'équivalence que nous avons établie entre (2.8) et le
problème optimiste, on conclut que (2.4)-(2.6)-(2.7) admet une solution
optimistique globale.
·
Exemple 2.2.1. Reconsidérons le PBN de l'exemple 2.1.1
:
|
« min
y
|
n o
» x2 + y2 : x E Ø(y), -1 <
y < 1
|
|
Où Ø(y) = Argmin
x
|
n o
- xy : 0 < x < 1
|
Comme trouvé précédemment, on a
?0(y) = minnx2 + y2 : x E Ø(y)=(1 + y2
si y > 0
x
siy < 0

y2
Le problème optimiste s'écrit donc :
n o
min ?0(y) : -1 < y < 1
y
et la solution optimiste globale est (x0, y0) = (0,
0).
L'un des défauts de l'approche optimiste est qu'elle
n'est pas envisageable dans la plupart des cas concrets. En effet, en
économie par exemple, dans le but de faire régner une concurrence
loyale entre des entreprises concurrentes, la législation interdit le
plus souvent une quelconque coopération entre les dites entreprises et
leurs éventuels clients.
Aussi, dans grand nombre de problèmes
modélisés en PBN, le suiveur ne constitue que rarement une
personne physique avec qui le leader pourrait envisager une coopération.
En plus, même si la coopération est permise, le leader n'a pas de
garanti sur le fait que le suiveur respectera ses engagements.
Ceci constitue quelques limites de l'approche optimiste.
|
2.3 L
|
'approche pessimiste
|
Lorsqu'il est impossible au leader d'influencer les choix du
suiveur, une décision optimale du leader, étant donné
qu'il n'a aucun contrôle sur le problème, est celle qui limite au
mieux les dégâts lorsque le suiveur prend des décisions qui
lui sont nuisibles.
Mathématiquement, la formulation pessimiste de
(2.2)-(2.3) s'écrit :
n o
min ?p(y) : y E Y (2.9)
y
|
?p(y) = max
x
|
n o
F(x, y) : x E Ø(y) (2.10)
|
Définition 2.3.1. Un point (x*,
y*) E Rn x Rm est appelé solution
pessimiste locale de (2.2)(2.3) si y* E Y, x* E
Ø(y*) avec
F(x, y*) < F(x*, y*) V x E
Ø(y*)
et il existe Uä(y*), 8 > 0 boule ouverte
centrée en y* de rayon 8 telle que
?p(y*) < ?p(y) Vy E
Uä(y*) n Y
(x*, y*) est appelée solution
pessimiste globale si 8 = +oo.
Le problème 2.4)-(2.9)-(2.10) est appelée
formulation péssimistique de (2.2)-(2.3)).
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 25
Énonçons un théorème d'existence de
solution pessimiste.
Théorème 2.3.1. Considérons le PBN
2.4)-(2.9)-(2.10). Supposons que Ø(.) est
semi-continue inférieurement (Sci) en tout point de Y et que l'assertion
(C) est satisfaite. Supposons que (2.9) admet une solution admissible, alors
2.4)-(2.9)-(2.10) admet une solution optimale globale.
Preuve :
{ }
Posons K = (x,y) ? Rn × Rm
: g(x, y) = 0 et h(x, y) = 0 .
L'assertion (C) nous garanti que K est compact.
Soit P2 : Rn × Rm -? Rm
(x, y) 7-? y la deuxième
projection.
P2(K) n Y est l'ensemble des solutions
admissible de (2.9). P2 étant continue, P2(K)
est compact ; d'où P2(K) n Y est compact
comme intersection d'un fermé et d'un compact.
Montrons que : cpp est semi-continue
inférieurement (Sci).
Soit y0 ? Rm, montrons que cpp
est Sci en y0.
soit (yk)k?N une suite de Rm telle
que (yk)k -? y0
k?+8
Il suffit de montrer que lim inf
cpp(yt) =
cpp(y0)
k?+8
i.e
sup
k?N
inf cpp(yt) =
cpp(y0)
t=k
On a F(x, yt) =
cpp(yt) ?x ?
Ø(yt) d'où
inf
t=k
F(x, yt) = inf
cpp(yt) ?x ?
Ø(yt) ?k ? N
t=k
et
F(x, yt) = sup
k?N
inf
t=k
inf
cpp(yt) ?x ?
Ø(yt)
t=k
sup
k?N
i.e
|
lim inf
t?+8
|
F(x, yt) = lim inf
cpp(yt)
t?+8
|
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI
2007-2008
Or F est continue sur Rn × Rm
;
d'où F(x,.) est continue sur Rm
?x ? Rn fixé ; il vient alors que :
|
lim inf
t?+8
|
F(x, yt) = lim
t?+8
|
F(x, yt) = F(x,
y0) ?x ? Rn
|
Donc
liminf cpp(yt) =
F(x, y0) ?x ? Ø(y0) ? Rn t?+8
d'où
lim inf cpp(yt) = max
x {F(x, y0) : x ?
Ø(y0)}

t?+8
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 26
i.e
lim inf ?p(yt) > ?p(y0)
t?+8
Donc ?p est Sci.
Comme l'ensemble des solution admissibles de (2.9) P2(K) n Y est
compact, le problème 2.4)-(2.9)-(2.10) admet un minimum global.
·
Exemple 2.3.1. On considère une nouvelle fois le PBN
de l'exemple 2.1.1. La formulation pessimiste de ce problème est
:
n o
min ?p(y) : -1 < y < 1
y
Où
(
2 1+ y2 si y > 0
?p(y) = max{x + y2 : x E Ø(y) y
}= si <0
y
avec
|
Ø(y) =
|
{
|
{0} si y < 0
{1} si y > 0
[0,1]
si y = 0
|
.
|
|
Où
|
Ø(y) =
|
{
|
[-1,1] si y = 0
{-y - 1} si y > 0 {-y + 1} si y < 0
|
(x0, y0) = (1, 0) est une solution pessimiste locale et la
valeur péssimistique de la fonction objectif est 1.
Mais la résolution des PBN en utilisant l'approche
pessimiste présente également des défauts :
En effet les solutions pessimiste sont en
général instables, dû [11] au manque possible de
semi-continuité de la fonction Ø(.) qui à chaque
paramètre du problème du leader associe l'ensemble des solutions
du problème du suiveur correspondant.
Ce défaut conduit à deux conséquences
majeures :
r Les solutions péssimiste ne sont pas en
général de bonnes approximations des solutions réalisables
en pratique.
r Une petite perturbation sur les données du
problème peut conduire à un changement drastique de la solution
du suiveur. Ainsi, si le leader ne résolvait pas son problème
réel mais une approximation (ce qui est le cas la plupart du temps), ses
solutions peuvent être éloignées des solutions
réelles.
Les exemples 2.3.2 et 2.3.3 suivants illustrent bien ces
défauts :
Exemple 2.3.2. Considérons le PBN
min
y
{(x - y)2 + y2 : ?20 < y < 20, x E
Ø(y)}
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 27
Pour y = 0; on a Ø(y) = [-1,1] et
le problème du suiveur admet pour ce paramètre une
infinité de solutions.
Posons F(x, y) = (x - y)2 + y2
; en introduisant dans F la solution du suiveur , on obtient
:
|
F(x(y), y) =
|
{
|
(-2y - 1)2 + y2 si y > 0 (-2y +
1)2 + y2 si y < 0
E [-1,1] si y = 0
|
Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
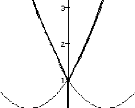
FIG. 2.2 Fonction objectif du leader la formulation
optimiste du problème est la suivante :
|
min
y
|
n o
?0(y) : -20 < y < 20
|
Où
n o
?0(y) = min (x - y)2 + y2 : x E
Ø(y)
x
Il est clair que la solution optimiste du problème
est (x0, y0) = (0, 0). Le graphe de F nous permet d'ailleurs
de confirmer ce résultat.
Une fois de plus, d'après le graphe de F,
quelque soit le signe de y, y =6 0 , la fonction F
|
atteint son infimum lorsque y --* 0 et on a :
lim
y?0
|
F(x(y), y) = 1.
|
Ainsi, la solution réalisable en pratique du
problème est atteinte lorsque y --* 0 et la valeur de la
fonction objectif est 1; ce qui est bien éloigné de la
valeur optimistique qui est 0 .
Exemple 2.3.3. Considérons le PBN
n o
min - x + y2 : -0.5 < y < 0.5, x E
Ø(y)
y
|
Où
|
Ø(y) = Argmin
x
|
{xy2 : -1 < x < 1}
|
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches. 28
On a alors
(
{-1} si y =6 0
W(y) =
[-1,1] si y = 0
Pour y = 0, le problème du suiveur admet
une infinité de solutions; on est donc dans le cas de la non
unicité. La formulation optimiste du problème est :
min
y
{?0(y) : -0.5 < y < 0.5}
|
Où
|
n o
?0(y) = min (-x + y2 : x E W(y)
x
|
L'unique solution optimiste est (x0, y0) = (0, 1)
; et la valeur optimiste de la fonction objectif du leader est -1
Supposons maintenant que le problème du suiveur
soit perturbé de telle sorte que l'ensemble des solutions du
problème du suiveur se réécrivent :
|
Wá(y) = Argmin
x
Où á > 0 et suffisamment petit.
Posons fá(x, y) = xy2 + áx2
On a Vxfá(x, y) = y2 +
2áx
|
{xy2 + áx2 : -1 < x < 1}
|
2
Vxfá(x,y) = 0 = x =
-2
On a
V2 xxfá(x,y) = 2á > 0
d'où pour y admissible, x = -y2
2á est solution du problème du
suiveur. Ainsi,
(
{-1} si y2 > 2á
- y22á
2á
si y2 <
Wá(y) =

Mémoire de DEA * Laboratoire d'analyse
numérique * UYI Francisque.D.Fouodji (c)UYI 2007-2008
En insérant cette solution dans la fonction objectif
du leader, on obtient :
(
F(xá(y), y) = y2 + 1 si
y2 > 2á
y2 - y2
2á si y2 < 2á
Le problème devient donc
n F (xá(y), y) : -0.5 < y
< 0 o
min
y
L'unique solution de ce problème est
yá = 0 Vá > 0
Lorsque á --* 0 , la solution du
problème perturbé est (0, 0) et la valeur de la fonction
objectif tend vers 0; valeur qui est éloigné de la
valeur optimiste-1.
Ainsi, la solution optimiste est instable.
Non unicité de la solution du problème du
suiveur : les différentes techniques d'approches.
29
Mémoire de DEA *
Laboratoire d'analyse numérique *
UYI Francisque.D.Fouodji c~UYI 2007-2008
L'étude tant du point de vue théorique que
numérique d'un problème d'optimisation instable est très
difficile. Néanmoins une possibilité d'éviter ce
problème d'instabilité existe. Elle consiste à prolonger
(une sorte de prolongement par continuité) la fonction W(.) de
façon à obtenir une nouvelle fonction W' : Rm
-? 2R7 continue. D'après les résultats
énoncés dans [23], le nouveau problème "réagira" de
façon régulière aux perturbations
"régulières" (i.e pour de petites perturbations, la solution du
problème perturbé ne sera pas éloignée de la
solution du problème non perturbé) ; et ainsi, le problème
d'instabilité sera résolu.
L'approche pessimiste de résolution des PBN dans le cas
de la non unicité à été intensive-
ment
étudié par P.Loridan, J.Morgan et leurs Co-auteurs. Dans
plusieurs articles, ils étudient le PBN (2.2)-(2.3) dans un cas plus
général, en ce sens que les fonctions f, g, h, F, et G
qui définissent le problème sont perturbées et la
convergence vers un problème non perturbé est
étudiée. (voir par exemple les articles [19, 20, 21]). Dans [22],
le concept de å-optimalité est utilisé pour
régulariser le problème pessimiste.
Malgré tous ces résultats, certains
problèmes demeurent :
? l'approche optimiste est très peu souvent
envisageable;
? les solutions péssimistes, même lorsqu'elles sont
stables sont le plus souvent éloignées des solutions
réelles;
? comment discriminer entre l'approche péssimiste et
optimiste? Autrement dit dans une situation donnée, comment savoir
quelle approche (optimiste ou péssimiste) est la plus
adéquate?
Afin de contourner ces difficultés, il serait
préférable pour le leader, non pas de calculer la solution
"réelle" optimiste ou péssimiste de son PBN mal-posé qui
dans ce cas cours de grands risque d'être instable (donc inutilisable),
mais d'en calculer une approximation dans un voisinage des solutions
admissibles qui aurait la propriété d'être fortement
stable. L'approche par régularisation permet de calculer de telles
solutions.
Dans le chapitre suivant, après avoir
présenté les différentes techniques de
régularisation développées jusqu'ici dans la
littérature, nous exposons un algorithme de résolution des PBN
dans le cas de la non unicité développé par S.Dempe en
2000 basé sur l'approche par régularisation. Nous-nous pencherons
enfin sur l'étude de la convergence de cet algorithme.
| 

