2.3 La reconnaissance par apparence
Dans la suite on va définir ce que nous entendons par
reconnaissance par apparence, on va fournir une classification de principales
méthodes existantes en exposant leurs avantages et leurs
inconvénients
2.3.1 définition et caractérisation
La reconnaissance par apparence, toute méthode de
reconnaissance qui cherche a` modéliser des objets (2D ou 3D)
directement par leur image percue et non pas par un modèle
construit a` partir d'une conception abstraite particulière. Le facteur
commun a` toutes les méthodes qui entrent dans la catégorie
» par l'apparence » est qu'elles modélisent des objets 3D par
un ensemble d'image prises dans des conditions particulières. Ces
conditions sont liées aux contraintes de reconnaissance qui sont
imposées au problème que le système censéa`
résoudre. Les conditions qui sont généralement
considérées sont la plupart du temps liées aux changements
d'éclairage ou au déplacement de l'objet dans l'image. Dans la
majoritédes applications qui implémentent cette approche, elle
est couplée a` une indexation, bien que ceci ne soit pas une condition
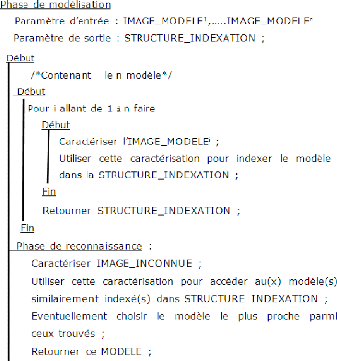
obligatoire. Dans ce cas, la structure globale des algorithmes se
présente comme montrée dans l'algorithme suivant : [LAM 98]
alogorithme1 : squelette d'une reconnaissance par l'apparence
s'aidant d'une indexation.

Lors de la phase de reconnaissance, il n'est pas toujours
necessaire que l'image pr'esent'ee soit une copie conforme d'un des
modèles index'es. De facon g'en'eral, on distingue deux
grands classes dans les m'ethodes de reconnaissance par l'apparence. L'une
regroupe les approches qui considèrent une image comme une entit'e
indivisible, donnant g'en'eralement lieu a` un index unique pour image. L'autre
qui mod'elisent les objets par un ensemble de caract'eristique
h'et'erogènes d'esignant des parties plus ou moins grandes dans l'image,
on parlera de m'ethodes globales pour les unes, locales pour les autres.
2.3.2 Modelisation globale
Les mod'elisations globales sont principalement centr'ees autour
d'une même approche, la m'ethode ne considère plus les images
comme des matrices n x m de valeurs de niveau de
gris, mais comme des vecteurs de taille nm contenant ces
mêmes valeurs. Ainsi, couvrant l'espace des apparences possibles d'un
objet par Ó images modèles, il est possible de calculer une
matrice de covariance de dimension nm x nm qui capte la variation entre les
diff'erents modèles. La matrice est obtenue en calculant la moyenne M
des vecteurs modèles Mi=l..k et en posant :
Ó= Xk (Mi - M)(Mi - M)k
i=1
Les vecteurs propres de cette matrice forment alors une base
dans laquelle il est possible d'exprimer l'espace d'efini par les
modèles. La base optimale en d dimensions, au sens des moindres carr'es,
est obtenue en prenant les vecteurs propres ayant les d plus grandes valeurs
propres, ce qui permet de faire une r'eduction consid'erable de la dimension de
l'espace sans perte de qualit'e visuelle (d est nettement inf'erieur a` k), car
cette d'ecomposition est en fait une analyse en composantes principales. Une
image est donc repr'esent'ee comme un point dans l'espace de ces vecteurs
propres, et la reconnaissance revient a` faire une recherche du plus proche
voisin dans l'espace a` d dimensions consid'er'ees. [LAM 98]
L'avantage principal de cette approche est sa r'eduction
consid'erable des dimensions pour la repr'esentation d'une image. Dans le cas
d'une image 512 x 512 (vecteur de dimension 5122 = 2293620, on prend
typiquement les 10 plus grandes valeurs propres, ce qui revient a` une
r'eduction de dimension d'un facteur d'ordre 104. Ceci permet de
r'ealiser des indexations efficaces et des recherches rapides, Malheureusement
ses inconv'enients sont de taille :
· Le fait que l'approche soit globale la rend
particulièrement sensible a` des occultations.
· Les changements d''eclairage, ou des transformations
g'eom'etriques lors de la prise de vue influent directement sur la
repr'esentation finale de l'image.
| 

