IV.9. Analyse des talus par la méthode des
éléments finis :
Dans les références bibliographiques on peut
trouver très large type d'éléments et des méthodes
de résoudre des problèmes par la méthode des
éléments finis. On a concentré dans cette description sur
la formulation utilisé dans le logiciel SAS-FEM.
IV.9.1. Type d'élément finis :
L'élément linéaire triangulaire a
été le premier type de l'élément 2D
développé pour l'analyse des structures planes. La formulation
est également plus simple par rapport les éléments finis
en 2D. Il a été trouvé que l'élément
linéaire triangulaire est moins précis par rapport aux
éléments linéaires quadrilatère. Cependant, la
réalité est que l'élément triangulaire est encore
très utile à cause de sa manière adaptative à la
géométrie complexe.
Les éléments triangulaires sont normalement
utilisés lorsque l'on veut mailler un model 2D comprenant une
géométrie complexes avec des angles aigus. En outre, la simple
configuration topologique de triangulaire, permet de développer des
programmes générateurs de maillage automatiquement et facilement.
Le logiciel SAS-FEM comporte un générateur facile et relativement
puissant qui peut générer un maillage pour n'importe quelle
structure complexe
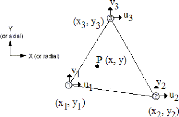
IV.9.2. Développement de la fonction
d'interpolation : Considérant un élément triangle
plane à 3 noeuds :
] u
[ (
- x y x y y y x x x y
- ) ( ) ( )
- - + -
1 3 3 1 3 1 3 1
+
+
u x y N x y u N x y u N x y u ( , ) ( , ).
= ( , ) .
1 1 + 2 2 + 3 ( , ) . 3
Page 81
Chapitre IV : Les méthodes de calcul.
On va écrire u(x,y) et v(x,y) a
chaque point P dans l'élément en fonction de : u1,
u2, u3, v1, v2, v3. La plus simple forme est d'assumé que
u(x,y) et v(x,y) sont des polynômes linaire.
Noté que ces équations sont des équations
approximés. Aussi u(x,y) et v(x,y) sont
indépendant.
u ( x , y ) = a1
+a2x +a 3y (1)
v ( x , y ) = b1
+b2x +b3y (2)
Il faut trouver les constants de chaque équation (1) et
(2) après appliquer les condition aux limites par exemple la fonction
u(x,y) on a :
? ?
? ?
? ?
? ?
?
?
y 1
y
y 2
y x y x y
u1
a1
x2
x2
x3
x3
-
3
1
1
?
?
y
y y
u2
a2
y2
-
2
A
?
?
? ? ?
?
?
?
?
?
?
?
u3
a3
x3
- - y y
2 3 3 1 1
- x x x
- x x
-
2 1 3 2 1
- -
1 3 1 2
1
?
?
?
a1
u1
y 1
x 1
u1
y 1
= +
a a x a
+
1 2 1 3
1
?
a2
u2
y 2
x 2
y 2
?
?
u a a x a
= + +
2 2 2 2 3
a3
u3
?
1
y 3
?
?
?
?
?
?
?
?
?
? ?
? ?
? ?
? ?
? ?
? ?
? ?
u a a x a
= + +
3 1 2 3 3
x y
3 3
Donc :
[ ( x y x y y y x x x y u
- ) ( ) ( )
- - + - ]
2 3 3 2 3 2 3 2
u x y
( , )
1
2
A
[ (
- x y x y y y x x x y u
- ) ( ) ( )
- - + - 1 ] 3
1 2 2 1 2 1 2
1
2
A
2
A
1
2
1
(6)
(7-a)
(3)
(5)
Avec la même procédure on aura pour le variable
v(x,y) :
|
v x y N x y v N x y v N x y v
( , ) ( , ) .
= + +
1 1 2 ( , ) . 2 3 ( , ) . 3
|
(7-b)
|
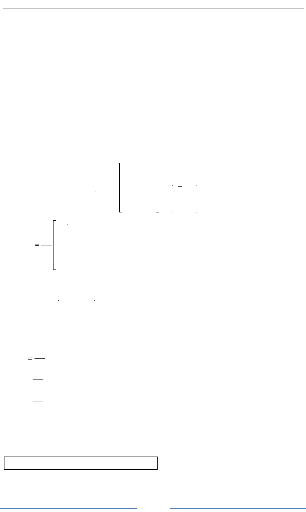
Où : N1, N2, N3 sont les fonctions
d'interpolation de l'élément triangle, ses variation est
présenté comme suite :
> Donc dans chaque élément on peut
écrire:
? ? ? ?
??

u 1 ?
?
v 1 ?
.
?
??
? 0 0 N 0
??? =
??? u x y
( , ) N N
1 2 3
v x y
( , ) ?? 0 N 1 0 N 2 0
N3
u 2 ? (8)
?
?
??
?
?
v2
u3
? u3
IV.9.3. Développent de déformation et
contrainte :
En deux dimensions il y a trois composantes majeur de contrainte
ó T = { ó x ó ó .
La
xy }
y
déformation correspondante est å T = {
å x å y åxy}. La déformation peut
être exprimé :

?
u
?x
?v
?y
? ? u ? v ?
? + ?
? ? y ? x ?
å
å
å
x
=
y
=
xy
(2.9)
De l'équation (2.6) et (2.7) the déformation sont
donné par:
+
?N3
?N1
+
u1
u2
u 3
?x
?x
? ? N ? N ?
2 2
+ ? u + v
?
2 2
? ? y ? x ?
?? N ? N ?
3 3
+ ? u + v
?
3 3
? ? y ? x ?
x
=
?y
å
? ?
?
?N1
?N1
+
?
?
?
u1
v1
?y
?x
En écriture matricielle
?N2
?x
?N1
v1 + ?N2
v2
?y
? N 2
0 0
? N 2
? y
? N 2
?N3
?y ?x ?y
? N 3
?y
? N 3
?x
? ? ? ? ? ? ? ? ?
u 1
v 1
u 2
v 2
u 3
v 3
??
?
?
??
?
?
? N 3
0 0
?x
??å
xy
åx
åy
?N1
?x
0
?N1
?y
0
?N1
?y
?N1
?x
.
?
?
?
??
?
??
? N 2
? x
+
v 3
å
å
y
=
xy
?N3
?y
(2.10)
(2.11)
Ou bien:
{å } = [ B .]{ U} (2.12)
où: [ B] est la matrice
déformations-déplacements égale à:
Page 83
1
[ B]
?
?
?
??
A
2

y 2 - ?
0 x - x 0 x - x 0 x
- x (2.13)
3
x1- -
Y3
0
Y3
Y1
0
Y1 Y2
0
2
1
2 1
3
x 3 - x 2 y 2 - y
3
- x 3 y 3 - y 1

x 2 - x 1
. Y
1 - y2
Pour le développement des contraintes en deux
dimensions. La relation déformationcontrainte peut être
considérée soit contrainte-plane, soit déformation plane
dépond de la structure étudiée.
Généralement l'analyse des talus en deux dimensions
sont considérés comme problème déformation plane,
oil la relation est donné par:
|
ó
x
E?- í)
? ( 1 + 0( 1 - 2í)
?óxy ? 0
Ou bien :
|
?? ?
( 1-íí )
00??åexy?
(1-2v) ?1 1
0 låx), I
2 ?` '
|
(2.14)
|
{ó } = [ D .]{å}
(2.15)
Avec: [ D] matrice de comportement
(caractéristiques de matériau). A partir de l'équation
(2.12) et (2.15) on peut écrire:
{ó } = [ D ][.B.]{ U}
(2.16)
IV.9.4. Résolution Eléments Finis
:
Après assemblage des matrices élémentaires
dans la matrice de rigidité globale, la forme finale est comme suite
:
[ K .]{ U} ={ P}
oil :
{ U} : Vecteur de déplacements
[ K] : matrice de rigidité globale égale
à:
[ K ] = ? [B] T [
D] [ B] dV = [B] T [
D] [ B]? dV = Ah. [B]
T [ D] [ B] (2.17)
V V
{ P} : le vecteur global des forces composé de
|
Forces de corps { Pb } = ?
|
[ N ] T [ b] dV
(2.18)
|
|
Forces de tractions { Pt } = ?
|
[ N ] T [ t] dA
(2.19)
|
Et forces nodales{ Pn} .
IV.9.5. Modélisation des matériaux en
SAS-FEM :
L'analyse élastique-plastique en deux dimensions de
déformation-plane est utilisée, oil le comportement du
matériau de sol est modélisé par le critère de
Mohr-Coulomb. Ce dernier, est considéré comme le critère
le plus utilisée dans la pratique géotechnique. Le critère
de Mohr-Coulomb peut être exprimé comme :
|
F =I
3
1
|
sin
|
ö + ? - 1 ?
J cos è sin sin
è ö c . cos
2 ?? ?? -
3
|
ö (2.20)
|
oil
ö : est l'angle de frottement interne,
c : est la cohésion

1 ? 3 J ?
- 1
è = sin ? ( )
?
3 3 (2.21)
3 / 2
3 ? 2 J 2 ?
I1 = (ó x +
óy + ó z) =
3óm (2.22)
1 2
[ ( 2 2 ) ( ó ó ó ó
ó ó ô ô ô
2 2
J ó ó ó ) ] 2
+ + + (2.23)
2 3
= + + - + +
x y z x y y z z x xy yz zx
2 2 2
J s s s = 2 . . s
3 x y z + ô ô ô - ô
- ô - ô
s s (2.24)
xy yz zx x yz y zx z xy
sx = óx-óm
;;syy= ó -óm ;
sz x= ó-óm
(2.25))
y'
Le modèle de matériau décrit ci-dessus se
compose de six paramètres
· Angle de frottement(ö))
· Cohésionn (c )
· Dilation(ø/ )
· Module de Young (E)
· Module de Poisson (í )
· Poids volumique de sole (ã )
| 

