4.2. Application du contrôle 8 au modèle de la
suspension quart de véhicule

Après avoir présenté la synthèse
8 standard, nous allons dans cette section appliquer cette technique
de commande sur le modèle linéaire quart de véhicule afin
de synthétiser une loi de commande permettant d'assurer, à la
fois, un bon confort et une bonne tenue de route.
4.2.1. Mise sous forme standard

Pour pouvoir synthétiser une commande , il faut au
préalable mettre le système considéré
sous forme standard. Pour cela nous avons besoin de
déterminer quelles sont les entrées
exogènes , les
entrées de commande , les sorties à contrôler et les
sorties mesurées . Dans
notre cas la seule mesure disponible est le débattement
de la suspension ( ) - ( ) , qui est
mesurée par un capteur électronique auquel
s'ajoute un bruit de mesure. Celle-ci est à la fois facile à
effectuer sur un véhicule et utile pour le correcteur. Les
entrées exogènes sont le bruit de mesure d'une part et le profil
de la route d'autre part. La seule entrée de contrôle correspond
à la force de l'actionneur actif. Enfin, pour les sorties
contrôlées nous cherchons à limiter
l'accélération verticale de la caisse ( (
) ), l'écrasement du pneu ( ) - ( ) , le débattement
de
la suspension ( ) - ( ) et celui de la commande . Cependant, nous voulons
limiter ces
sorties différemment selon les fréquences. Les
sorties à contrôler correspondent donc à ces sorties
affectées de pondérations. Les fonctions de pondération
sont donc choisies de façon à améliorer les fonctions de
transfert dans les domaines de fréquence intéressants.
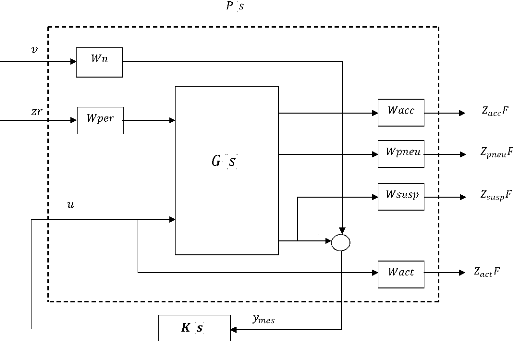
Le schéma suivant montre l'emplacement des fonctions de
pondérations fréquentielles permettant de gérer les
compromis.
( )
( )
( )
+ +


69
Figure 4.3 - Mise sous forme standard du problème avec
les pondérations

Le système ( ) représente la dynamique du quart
de véhicule à 2DDL. Les pondérations fréquentielles
ajoutés aux entrées et sorties du système conservent les
fréquences prédominantes et atténuent les
fréquences moins importantes. Pour les critères de performance,
la pondération conserve les fréquences les plus sensibles et
atténue les fréquences moins importantes.
4.2.2. Choix des pondérations
L'objectif principal est de réduire
l'accélération de la caisse (pour le confort des passagers), de
réduire l'écrasement du pneu (pour garder le contrôle du
véhicule en toute sécurité), de réduire le
débattement de la suspension (contrainte matérielle), et la
commande en force de l'actionneur (afin de ne pas trop le solliciter en hautes
fréquences). Le filtrage du bruit de mesure n'étant pas notre
principal objectif, la pondération est très faible. A cet effet,
une pondération constante



est choisie pour le bruit de mesure. La pondération est
aussi choisie comme constante
pour l'écrasement du pneu. La nécessité de
conserver l'adhérence des pneus sur toute la gamme des fréquences
explique ce choix.
Comme les perturbations de la route sont importantes pour la
conception du contrôleur, la
pondération agissant ( ) - ( ) sur correspond à un
filtre passe bas avec une fréquence
de coupure de 1Hz. Il permet de modéliser la
densité spectrale de la route pour qu'elle soit représentative du
cas réel.
La pondération fréquentielle agissant sur ( ) - ( )
correspond à un filtre passe bas

avec une fréquence de coupure de 5Hz. Il permet de
contrôler la déflexion de suspension en basses fréquences
là où elle est la plus importante et facilement contrôlable
par l'actionneur. Il permet aussi de réduire la force appliquée
en hautes fréquences, car l'actionneur a une fréquence maximale
d'opération limitée. De plus, en pondérant la commande par
un passe haut ( ) pénalise l'utilisation de l'actionneur en hautes
fréquences.

La pondération agissant sur ( ( ) ) correspond au
filtre de sensibilité humaine.
Pour représenter l'importance relative de chaque
critère, un poids multiplie l'amplitude de chaque filtre. Le tableau
suivant donne les valeurs des poids utilisés :
|
poids
|
variable
|
critère
|
valeur
|
|
|
Bruit de mesure
|
0.0001
|
|
|
Perturbation de la route
|
1
|
|
|
Déflexion de suspension
|
25
|
|
|
Déflexion du pneu
|
6000
|
|
|
Accélération du passager
|
1
|
|
|
Force de l'actionneur
|
0.00000001
|
Tableau 4.1 - Poids des pondérations
Les pondérations choisies sont les suivantes :

= ; =
(4.19)

2
( ) = (4.20)
+ 2
Avec = 1
2
( ) = (4.21)
+ 2
Avec = 5
12
(4.22)
+ 30.02 + 901.3


Avec = 30.02 ; = 4.78 ; = 0.5



+ 2
= (4.23)
+ 2
Avec = 3 , = 30

71
Nous pouvons construire le système augmenté ( ) en
utilisant la commande sysic du <<robust control
Toolbox>> de <<Matlab>>.
Le correcteur est synthétisé avec la commande
<<hinfsyn>> sous Matlab. Il est donné
par sa
fonction de transfert :








4.134 10 + 1.327 10 + 1.433 10 + 9.434 10 + 4.094 10 + 1.169 10
+

2.164 10 + 2.203 10 + 6.533 10







+ 2.006 10 + 2.011 10 + 2.678 10 + 7.173 10 + 6.718 10 + 2.948 10
+
7.488 10 + 1.012 10 + 3.267 10
Après avoir réalisé la synthèse du
correcteur, nous obtenons = 15.133. Il faut noter que
l'ordre du correcteur ( ) est la somme de celle du modèle
et des filtres. Par conséquent, le correcteur obtenu pour le quart de
véhicule est d'ordre 9.
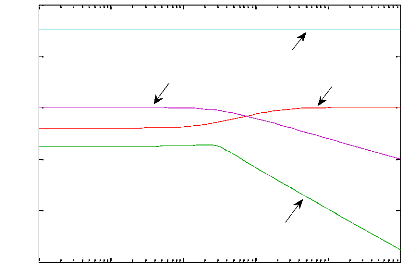
Les pondérations fréquentielles sur
l'accélération de la caisse, sur l'écrasement du pneu, sur
le débattement de la suspension et de la force de l'actionneur sont
représentées sur la figure 4.4.
Bode des ponderations Wpneu, Wsusp, Wact et Wacc
10-1 100 101 102
103 104
Magnitude (dB)
-100
-150
100
-50
50
0
Wsusp Wact
Wpneu
W acc
Frequence (Hz)

72
Figure 4.4 - Pondérations fréquentielles
appliquées sur les critères de performances

73
Chapitre IV synthèse
4.2.3. Présentation des résultats de
simulation
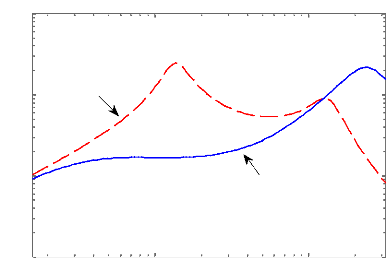
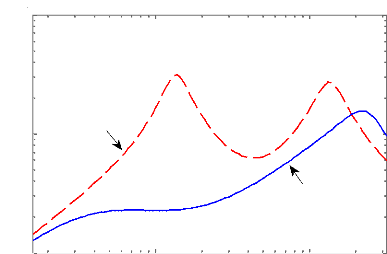
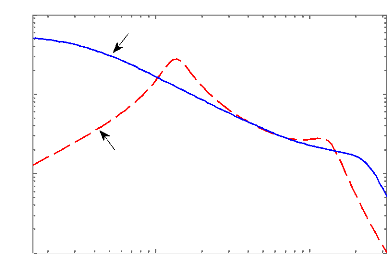
Les figures 4.5 à 4.8 montrent les réponses
fréquentielles et temporelles des critères de performances.
Nous rappelons que, le test temporel simule le passage sur une
bosse d'amplitude maximale de 5cm.
100 101
Magnitude (abs)
Diagramme de Bode du trasnfert Yacc(s)/w (s)
102
101
100
10-1
passif
actif
Frequence (Hz)
Figure 4.5 - Réponse fréquentielle du transfert
entre l'accélération verticale de la caisse et le
profil de la
route.

Chapitre IV synthèse
100 101
Magnitude (abs)
Diagran-me de Bode du transfert Ypneu(s)/w (s)
10-1
10-2
10-3
passif
actif
Frequence (Hz)
Figure 4.6 - Réponse fréquentielle du transfert
entre l'écrasement du pneu et le profil de la route.
100 101
Magnitude (abs)
Diagran-me de Bode du transfert Ysusp(s)/w (s)
100
10-1
10-2
10-3
passif
actif
Frequence (Hz)
Figure 4.7 - Réponse fréquentielle du transfert
entre le débattement de la suspension et le profil de la route.

75
Chapitre IV synthèse
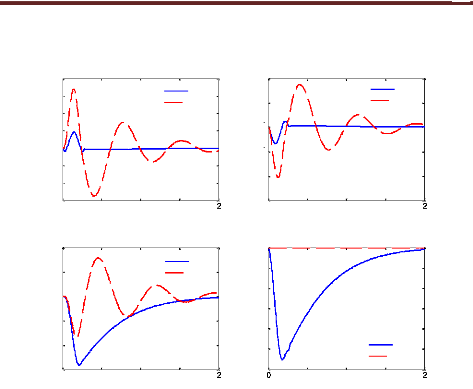
x 10-4 Ecrasement du Pneu
AccOlOration Verticale de Caisse
0
-20
Amplitude (N)
-40
-60
-80
-100
-120
temps (s)
x 10-3 DObattement de Suspension
0 0.5 1 1.5
4
riccati
passif
2
Amplitude (m)
0
-2
-4
-6
temps (s)
temps (s)
Force de Contrôle
0.5 1 1.5
temps (s)
riccati
passif
riccati
passif
0 0.5 1 1.5
4
2
Amplitude (m)
0
-2
-4
-6
0 0.5 1 1.5
0.4
riccati
passif
0.3
0.2
Amplitude (m/s2)
0.1
0
-0.1
-0.2
-0.3
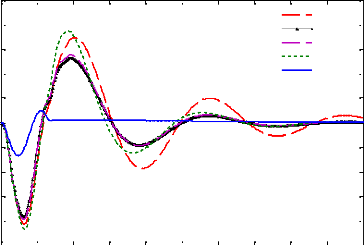
Figure 4.8 - Réponses temporelles
Les réponses fréquentielles et temporelles du
contrôle par Riccati, nous montre clairement
une nette amélioration des performances de la suspension
active comparativement au cas passif (sans contrôle).
En effet, les deux modes de résonance principaux,
autour de 1Hz et autour de 10 Hz respectivement de la masse suspendue et de la
masse non suspendue sont complètement ou pratiquement
éliminés pour les trois critères. Ceci montre que la loi
de commande élaborée assure de bonnes performances en termes
d'isolation vibratoire vis-à-vis des perturbations (un bon confort pour
les passagers) et de maintien du niveau d'adhérence au sol suffisamment
important (une bonne tenue de route). Cependant, ces améliorations sont
amenées au détriment du débattement de suspension en
basses fréquences.

Chapitre IV synthèse
4.3. Résultats pour le contrôle actif du
quart de véhicule à deux degrés de
liberté
Afin d'apprécier l'amélioration apportée
par les lois de commandes appliquées au système de la suspension
active du modèle quart de véhicule. On compare ces
dernières avec le cas passif (qu'on appelle aussi boucle ouverte).
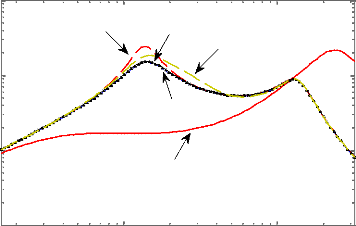
Les figures 4.9 à 4.15 montrent le résultat des
réponses en fréquence et le résultat des réponses
temporelles obtenues pour la suspension passive et les différentes
stratégies de contrôle.
Diagrarrire de Bode du transfert Yacc(s)/w (s)
passif LQG
LQG/LTR
LQR
Hinfini
102
10-1
100 101
101
Magnitude (abs)
100
Frequence (Hz)
Figure 4.9 - Réponse fréquentielle du transfert
entre l'accélération verticale de la caisse et le
profil de la
route.

77
Chapitre IV synthèse
Diagramme de Bode du transfert Ypneu(s)/w (s)
passif
LQG
LQG/LTR
LQR
Hinfini
10-3
100 101
Frequence (Hz)
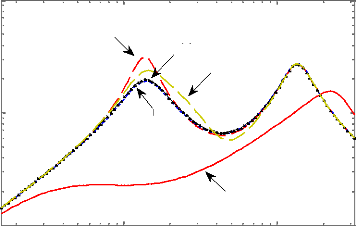
Figure 4.10 - Réponse fréquentielle du transfert
entre l'écrasement du pneu et le profil de la route.
100 101
Magnitude (abs)
Diagramme de Bode du transfert Ysusp(s)/w (s)
100
10-1
10-2
10-3
LQR
LQG
LQG/LTR passif
Hinfini
Frequence (Hz)
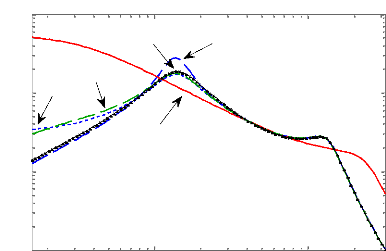
Figure 4.11 - Réponse fréquentielle du transfert
entre le débattement de la suspension et le profil
de la route.

Chapitre IV synthèse
Accélération Verticale de la Caisse
Amplitude (m/s2)
-0.1
-0.2
-0.3
0.4
0.3
0.2
0.1
0
passif LQR
LQG LQG/LTR Hinfini
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
temps (s)
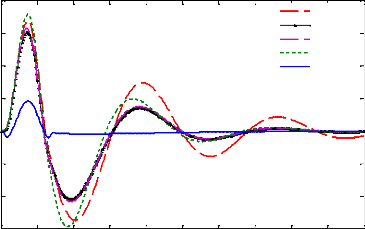
Figure 4.12 - L'accélération verticale de la
caisse obtenus pour les différentes lois de
commande.
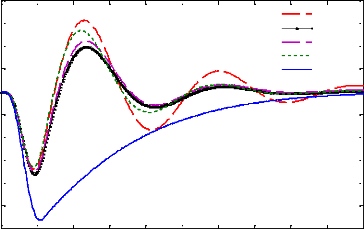
x 10-4 Ecrasement du pneu
Amplitude (m)
-1
-2
-3
-4
-5
4
5
3
2
0
1
passif LQR
LQG LQG/LTR Hinfini
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
temps (s)
Figure 4.13 - L'écrasement du pneu obtenus pour les
différentes lois de commande

79
Chapitre IV synthèse
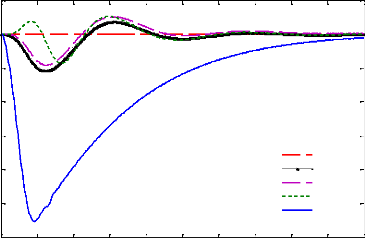
x 10-3 Débattement de suspension
Amplitude (m)
-1
-2
-3
-4
-5
-6
4
3
2
0
1
passif LQR
LQG LQG/LTR Hinfini
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
temps (s)
Figure 4.14 - Débattement de la suspension obtenus pour
les différentes lois de commande
Force de contrOle
Amplitude (N)
-100
-120
-20
-40
-60
-80
20
0
passif LQR
LQG LQG/LTR Hinfini
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
temps (s)
Figure 4.15 - Force de contrôle obtenu pour les
différentes lois de commande

Chapitre IV synthèse
Le tableau suivant donne la valeur de l'indice de performance J
:
|
Contrôle
|
Critère J
|
|
Passif
|
0.0362
|
|
LQR
|
0.0263
|
|
LQG
|
0.0268
|
|
LQG/LTR
|
0.0319
|
|
0.2771
|
Tableau 4.2 - Performance des différents contrôleurs
pour le modèle à 2DDL
Le contrôle par (LQR, LQG, LQG/LTR) permet
effectivement de minimiser le critère J, ce qui améliore
sensiblement la performance de la suspension. Le contrôle par offre un
indice de performance J le plus élevé. Par contre, la
réponse est beaucoup mieux modelée en fréquence, surtout
pour l'accélération verticale de la caisse et l'écrasement
du pneu. Cette observation nous permet de noter que la distribution en
fréquence de la réponse est importante dans l'évaluation
de la performance d'une suspension.

81
Chapitre IV synthèse
4.4. Conclusion
Dans ce chapitre, la synthèse d'une loi de commande pour
la suspension active du modèle
quart de véhicule a été
présentée. Dans un premier temps nous avons mené une
étude bibliographique sur la synthèse , Puis nous avons
détaillé les pondérations choisies de façon
à améliorer les fonctions de transfert dans les domaines de
fréquence intéressants. Nous pourrons dire, d'après ce qui
a précédé que les objectifs sont pleinement atteints avec
le contrôle .
| 

