|

.République Algérienne
Démocratique et Populaire
Ministère de l'Enseignement
Supérieur et de la Recherche Scientifique
Université Mouloud
MAMMERI, Tizi-Ouzou

Faculté de Génie Electrique et
d'Informatique
Département d'Automatique
Mémoire de Fin d'Etudes
En vue de l'obtention du diplôme
Master acalémique en )4utomatique
Option
commanie des systèmes
Theme


Proposé par : Mr DJENNOUNE Said
Présenté par:
Mr HADJOU Lyes
Dirigé par : Mr DJENNOUNE Said
Mr BELHOCINE Mohamed
Soutenu le : 15 /07 /2010


Résumé
L'objectif du travail réalisé est de mieux
comprendre la suspension active de véhicule automobile et plus
précisément de développer des stratégies de
contrôle optimal. Afin d'atteindre cet objectif, un modèle
analytique a été mis au point pour simuler la réponse de
la suspension à une perturbation correspondant au profil vertical de la
route.
Le modèle représente un système de
suspension quart de véhicule, équipé d'un actionneur qui
génère des forces sous la demande d'une stratégie de
contrôle, dont la présence confère à la suspension,
un caractère actif. Un travail de simulation sur le logiciel Matlab
permet de visualiser des résultats satisfaisants par rapport
à la suspension passive.
Abstract
The objective of this work is to better understand the active
suspension of motor vehicle and more specifically to develop strategies for
optimal control. To achieve this objective, an analytical model was developed
to simulate the response of the suspension to a disturbance corresponding to
the vertical profile of the road.
The model represents a quarter of a suspension vehicle
equipped with an actuator that generates forces under the application of a
control strategy, whose presence gives the suspension, active character. A
working simulation on the Matlab software allows visualizing satisfactory
results compared to the passive suspension.
Introduction générale.
1
Chapitre 1: Modélisation du système
physique .3
1. Modèle quart de véhicule 3
1.1. Introduction 3
1.2. La suspension 3
1.3. Description du modèle quart de véhicule 5
1.3.1. Équations de la dynamique 6
1.3.2. Mise sous forme d'état 7
1.3.2.1. Le formalisme d'état 7
1.3.2.2. La formalisation des équations sous forme
d'état 9
1.3.3. Relation entrée-sortie 15
1.4. Notion de stabilité 17
1.4.1. Conditions de stabilité 18
1.5. Résultats de simulation 20
1.6. Conclusion 24
Chapitre 2 : outils d'analyse des systèmes
bouclés 25
2. Introduction 25
2.1. Propriétés du système nominal 25
2.1.1. Performances nominales 26
2.1.1.1. Matrices de sensibilité 26
2.1.1.2. Objectifs de commande 27
2.1.2. Stabilité nominale 28
2.1.2.1. Critère de Nyquist (cas multivariable) 28
2.1.2.2. Théorème du faible gain 30
2.2. Notions de robustesse 31
2.2.1. Incertitudes de modèle 31
2.2.2. Robustesse en stabilité : analyse non
structurée 34
Chapitre 3 : commandes linéaires (LQR, LQG,
LQG/LTR) ...35
3.1. Introduction 35
3.1.1. Contrôle optimal 35
3.2. Commande Linéaire Quadratique 35
3.2.1. Formulation du problème de commande (LQR) 35
3.3. Commande linéaire quadratique gaussienne (LQG) 38
3.3.1. Formulation du problème de commande (LQG) 38
3.3.2. Synthèse d'une commande LQG 39
3.3.3. Structure de la de commande LQG 40
3.4. Commande LQG/LTR (Loop Transfert recovery) 42
3.4.1. Formulation du problème de commande (LQG/LTR) 42
3.4.1.1. Recouvrement en entrée 43
3.4.1.2. Recouvrement en sortie 43
3.4.2. Synthèse d'un correcteur LQG/LTR 44
3.5. Application des commandes linéaires au modèle
quart de véhicule 45
3.5.1. Objectifs de contrôle 45
3.5.2. Contrôle LQR 46
3.5.3. Contrôle LQG 47
3.5.4. Contrôle LQG/LTR 48
3.6. Simulations 50
3.6.1. Résultats de simulation LQR 50
3.6.2. Résultats de simulations LQG 53
3.6.3. Résultats de simulations LQG/LTR 55
3.7. Conclusion 57
Chapitre 4 : synthèse . 58
4.1. Introduction 58
4.1.1. La Synthèse o 58
4.1.2. Outils de calcul nécessaire à la
synthèse o 58
4.1.3. Formulation du problème o 61
4.1.4. Résolution du problème o standard
par Riccati : 64
4.2. application de la commande o au modèle de la
suspension quart de véhicule 68
4.2.1. Mise sous forme standard 68
4.2.2. Choix des pondérations 69
4.2.3. Présentation des résultats de simulation
73
4.3. Résultats pour le contrôle actif du quart de
véhicule à deux degrés de liberté 76
4.4. Conclusion 80
Liste des symboles, Figures et tableaux
Liste des figures
Figure 1.1 - Modèle de la suspension active quart de
véhicule 5
Figure 1.2 - Diagramme pôles-zéros du système
21
Figure 1.3 - Réponse fréquentielle des
critères de performances 22
Figure 1.4 - Réponse temporelle des critères de
performances 23
Figure 2.1 - Schéma bloc pour l'étude de la
performance nominale 25
Figure 2.2 - Schéma bloc pour l'étude de la
stabilité nominale 28
Figure 2.3 - Bouclage d'une matrice de transfert ( ) 29
Figure 2.4 - Critère de Nyquist multivariable 30
Figure 2.5 - Représentation
généralisée des incertitudes de modélisation 32
Figure 2.6 - Schéma d'analyse de la robustesse de la
stabilité 33
Figure 3.1 - Schéma général de la commande
linéaire quadratique (LQR). 40
Figure 3.2 - Théorème de séparation 43
Figure 3.3 - Structure d'un régulateur LQG 45
Figure 3.4 - Schéma bloc du régulateur et du
modèle 48
Figure 3.5 - Critères fréquentiels du modèle
quart de véhicule 54
Figure 3.6 - Réponses temporelles du modèle quart
de véhicule avec le contrôleur LQR à l'excitation

Do . 55
Figure 3.7 - Critères fréquentiels du modèle
quart de véhicule 56
Figure 3.8 - Réponse temporelle du modèle quart de
véhicule avec le contrôleur LQG à l'excitation

Do . 57
Figure 3.9 - Critères fréquentiels du modèle
quart de véhicule 58
Figure 3.10 - Réponse temporelle du modèle quart de
véhicule avec le contrôleur LQG/LTR à
l'excitation D( ) 59
Figure 4.1-- Problème DO standard 61
Figure 4.2 - Problème o standard incluant les
pondérations 63
Figure 4.3 - Mise sous forme standard du problème avec les
pondérations 69
Figure 4.4 - Pondérations fréquentielles
appliquées sur les critères de performances 72
Figure 4.5 - Réponse fréquentielle du transfert
entre l'accélération verticale de la caisse et le profil de
la route... 73
Figure 4.6 - Réponse fréquentielle du transfert
entre l'écrasement du pneu et le profil de la route 74
Figure 4.7 - Réponse fréquentielle du transfert
entre le débattement de la suspension et le profil de la
route 74
Figure 4.8 - Réponses temporelles 75
Figure 4.9 - Réponse fréquentielle du transfert
entre l'accélération verticale de la caisse et le profil de la
route... 76
Figure 4.10 - Réponse fréquentielle du transfert
entre l'écrasement du pneu et le profil de la
route 77
Figure 4.11 - Réponse fréquentielle du
transfert entre le débattement de la suspension et le profil de la
route... 77
Figure 4.12 - L'accélération verticale de la caisse
obtenus pour les différentes lois de commande 78
Figure 4.13 - L'écrasement du pneu obtenus pour les
différentes lois de commande 78
Figure 4.14 - Débattement de la suspension obtenus pour
les différentes lois de commande 79
Figure 4.15 - Force de contrôle obtenu pour les
différentes lois de commande 79
Liste des tableaux
Tableau 1.1 - Valeurs numériques des paramètres du
modèle quart de véhicule 20
Tableau 1.2 - Pôles du modèle de la suspension quart
de véhicule en boucle ouverte 20
Tableau 3.1 - Poids des pondérations multipliant les
critères 50
Tableau 3.2 - Marges de stabilité pour
déférentes valeurs de . 52
Tableau 3.3 - Marges de stabilité obtenus pour les
différentes lois de commande 52
Liste des symboles

Im : Partie imaginaire d'un nombre complexe, c'est-à-dire
Im( + ) = Re : Partie réelle d'un nombre complexe, c'est-à-dire
Re( + ) =



= v-1

S : Variable de Laplace.
: Temps.

: Masse non suspendue.
: Masse suspendue (caisse).

: Amortisseur du pneu.

: Amortisseur de la suspension.
: Ressort de la suspension.

: Ressort du pneu.
: Déplacement verticale de la caisse. : Déplacement
verticale de la roue.
: Profit de la route.
: Force de commande.
? ? : La somme des forces qui agissent sur la masse




, : Vecteur d'état, dérivée du vecteur
d'état. : Pulsation.
: Matrice d'évolution du système.
: Matrice d'application de la commande.

: Matrice d'observation.
: Matrice de transmission directe. : Matrice identité
de dimension q. : Signal de référence.
: Perturbation à l'entrée.

( ) : Fonction du transfert du correcteur.

( ) : Matrice de transfert en boucle ouverte.

( , , , ) : Représentation minimale de ( ).

E I1 La sortie du système.

E I1 La commande (sortie du correcteur).

E I1 L'effet sur la sortie des perturbations affectant le
système.

E I1 Les bruits de mesure.

: Matrice de sensibilité (en sortie).
: Matrice de sensibilité complémentaire en
sortie.
: Matrice de sensibilité (en entrée).
: Matrice de sensibilité complémentaire en
entrée.

[ ] : Transposée de la matrice .

[ ]* : Transposée conjuguée de la matrice .
i ( ) : Représente les incertitudes de
modélisation.

( ) : La matrice de transfert nominale du système.


II II : Norme de la matrice .



Valeur singulière maximale de la matrice . ( ): Valeur
singulière minimale de la matrice . : Critère linéaire
d'optimisation.

* : Commande optimale
: Horizon

: Temps final
Etat estimé

: Gain du retour d'état LQR : Gain du filtre de Kalman



: Gain du recouvrement du correcteur LQG/LTR
: Matrice symétrique définie positive : Matrice
symétrique définie positive et : Bruits blancs.



[ ] : Espérance mathématique de .
Abréviations
LQ : Commande linéaire quadratique
LQG : Commande linéaire quadratique gaussienne
LQG/LTR : Commande linéaire quadratique par recouvrement
LFT : Transformation linéaire fractionnelle
LTI : Linear Time Invariant (linéaire temps invariant)
Introduction

1

Les vibrations des structures mécaniques sont souvent
sources de problèmes affectant le bon fonctionnement de nombreux
systèmes, c'est le cas des structures flexibles. La maitrise du
comportement dynamique d'une structure flexible lorsque celle-ci opère
près de ses fréquences de résonances, devient un
problème majeur auquel les constructeur sont confrontés.
Plusieurs études ont donc été
effectuées afin d'éliminer l'effet néfaste de ces
vibrations. Les premières solutions techniques adoptées furent
celles dites passives en adoptant la méthode dite de découplage,
ou isolation vibratoire, ce qui consiste à désorganiser la
propagation des vibrations en alternant des milieux d'impédances
mécaniques très contrastées, ou alors celle de
l'amortissement, qui consiste à dissiper en chaleur, du fait d'une forte
hystérésis du matériau, les ondes vibratoires qui le
sollicitent. Dans les deux cas, nous introduisons des dispositions
constructives pour minimiser l'effet des vibrations.
De nombreux travaux de recherche ont portés sur le
développement des techniques qui permettent de réduire
significativement voir éliminer les vibrations, l'idée
étant d'introduire des éléments de tel sorte à
éliminer ces vibrations cette méthode de contrôle est
appelées contrôle actif.
Le contrôle actif permet de repousser les limites de la
maitrise du comportement dynamique des structures flexibles au delà de
celles permises par le contrôle passif. Des critères
économiques (gain d'énergie, gain de matière, ...), de
confort, de sécurité, ...peuvent être introduits. Pour cela
la structure doit être équipée d'éléments
actifs qui assurent l'échange d'énergie avec le milieu
environnant. Les automobiles, comme toutes les structures mécaniques,
n'échappent pas aux vibrations et c'est pour cette raison que toutes les
automobiles sont munies de suspension. La suspension automobile a pour but de
réduire et ultimement d'éliminer ces vibrations qui sont
néfastes pour les passagers et pour le véhicule. Le but de ce
travail est de mieux comprendre la suspension active et plus
précisément de développer des stratégies de
contrôle permettant de satisfaire des spécifications face aux
perturbations de la route.
Le premier chapitre présente la modélisation du
système de suspension quart de véhicule à deux
degrés de liberté servant à l'application des commandes
ainsi que les entrées du système et les critères de
performances.
Le deuxième chapitre est consacré à l'outil
d'analyse des systèmes bouclés où nous définissons
la stabilité et l'aspect robustesse.
Le troisième chapitre est dédié à
la présentation et la comparaison des différentes
stratégies de contrôle linéaires quadratique qui sont la
commande LQR, la commande LQG et en fin la commande LQG/LTR. Un
contrôleur utilisant chaque stratégie est conçu pour un
modèle quart de véhicule. Le processus de synthèse et la
comparaison avec le modèle passif permettent de faire ressortir les
particularités associées à chaque type de
contrôle.
Dans le chapitre quatre, nous allons présenter la
synthèse 8 qui est une technique de commande robuste qui a fait
ces preuves parmi les techniques de commande les plus utilisées, cette
technique est basée sur la minimisation de la norme 8 d'un
critère de robustesse dans le domaine fréquentiel, c'est donc un
problème d'optimisation résolu selon deux approches que sont,
l'approche classique basée sur la transformation du problème
d'optimisation en deux équations de Riccati, la deuxième approche
plus récente est basée sur la solution d'un problème
d'optimisation sous forme d'inégalité matricielle (LMI) cette
dernière ne sera pas abordée . Une application au modèle
quart de véhicule est présentée en fin de chapitre.
Chapitre I
Modelisation du systems physique

3


5
Il est traité dans ce chapitre la modélisation
d'un système de suspension active quart de véhicule. Après
une brève présentation de la structure, nous élaborons un
modèle dynamique tout en considérant un comportement à
deux degrés de liberté. Ce dernier est synthétisé
à partir de l'analyse du mouvement vertical du quart de véhicule
par une méthode classique basée sur les théorèmes
généraux de la mécanique. Ensuite, nous introduisons une
formulation des équations de la dynamique sous forme d'état. Les
automaticiens sont plus familiers avec cette représentation car elle
correspond à une paramétrisation de la relation
entrée-sortie du système. Pour finir, nous présentons pour
ce type de suspension les critères de performances qui seront
utilisés dans les chapitres 3 et 4 pour l'analyse et la comparaison des
déférentes stratégies de commande. Ces critères
serviront donc de référence pour celles des systèmes
bouclés par les différentes commandes.
1. Modèle quart de véhicule 1.1.
Introduction
L'objectif principal de la conception des systèmes de
suspension des véhicules est d'atténuer les perturbations
causées par les imperfections de la route, qui sont néfastes pour
les passagers et pour le véhicule (sources d'inconfort et
d'insécurité).
Suivant le type de système de suspension qu'on veut
analyser et suivant l'objectif de l'analyse, la modélisation
diffère. Pour des questions de simplicité, et de sens physique,
lors de cette étude nous utilisons un modèle quart de
véhicule à deux degrés de liberté. Ce modèle
permet de prendre en compte le mouvement vertical de la caisse ainsi que celui
de la roue quel que soit le système de suspension en question. De plus,
concernant la dynamique du véhicule, le modèle est valide pour
l'étude du confort routier et de la tenue de route du
véhicule.
1.2. La suspension
On désigne sous le nom de suspension l'ensemble des
éléments mécaniques qui relient les
roues à la
structure principale d'un véhicule (caisse). Le système de
suspension verticale
permet de supporter le poids du véhicule et de filtrer les
irrégularités de la route, tout en maintenant une garde au sol
convenable, et les pneumatiques en contact avec le sol.
Dans les systèmes à suspension automobile, nous
distinguons trois types:
? Suspension passive:
Les systèmes à suspension passive traditionnelle
sont conçus à base des éléments passifs,
c.à.d. équipée généralement d'un ressort et
d'un amortisseur de valeurs fixes (invariant dans le temps), et ils sont
choisis en fonction des exigences de conception des véhicules.
? Suspension semi-active:
Les systèmes à suspension semi-active, sont
constitués d'un élément passif (ressort) et d'un
amortisseur contrôlé. L'amortisseur semi-actif, tout comme
l'amortisseur passif, ne peut que dissiper de l'énergie en produisant
une force qui s'oppose à la vitesse relative entre la caisse et la roue.
Mais contrairement à un amortisseur passif, cette force est modulable,
d'où le nom «semi-actif».
? Suspension active:
Les suspensions passive et semi-active produisent des forces
qui sont limitées par les positions et les vitesses relatives entre la
caisse et la roue et qui ne peuvent que dissiper de l'énergie. Cela peut
se traduire par la limitation de leurs aptitudes en termes de confort
(isolation vibratoire) et de sécurité (stabilité de
conduite).
Les systèmes à suspension active peuvent
améliorer leurs qualités à travers le rajout d'un
amortisseur actif, qui génère des forces instantanées
permettant de supporter les charges et d'assurer la sécurité et
le confort contre les contraintes (mauvaise route, surcharge, ...etc.).
Tout au long de notre étude, nous nous consacrons donc
à la suspension active, constituée par des éléments
passifs (ressort et amortisseur) en parallèle avec un amortisseur actif
(actionneur).
1.3. Description du modèle quart de
véhicule
Une représentation très utilisée dans la
littérature d'un système de suspension active est de prendre le
cas d'une roue, c'est-à-dire un quart de véhicule. Ce
modèle est semblable au modèle passif mais inclut un actionneur
tel qu'illustré à la figure ci-dessous [1.1]. La
simplicité de ce modèle en facilite l'optimisation et
l'analyse.

Figure 1.1 - Modèle de la suspension active quart de
véhicule
L'entrée du système est le mouvement vertical de
la route sous le pneu z0. Le modèle est composé de deux
masses distinctes. La masse non suspendue M1 représente la
masse de la roue avec tous ses éléments (pneu, la jante et les
axes...etc.). La masse suspendue M2 représente la masse du
châssis supportée par la roue en question. Le pneu est
modélisé par un ressort en parallèle avec un amortisseur
linéaire de constante situés entre la masse non-suspendue et la
route. La suspension est composée d'un ressort et d'un amortisseur
linéaire de constante en parallèle avec un actionneur de force
situés entre la masse suspendue et non-suspendue. L'amortisseur actif
(actionneur) génère des forces appliquées au
système (entre les masses suspendue et non suspendue) sous la demande
d'une stratégie de contrôle.
1.3.1. Équations de la dynamique
Il existe un nombre important de méthodes pour
établir les équations dynamiques d'un système
mécanique. Dans notre cas, on utilise une formulation classique
basée sur les théorèmes généraux de la
mécanique s'appuyant sur l'emploi du principe fondamental de la
dynamique.
1.3.1.1. Déterminations des équations du
mouvement
Le modèle considéré [Figure 1.1] prend en
compte le mouvement vertical de la caisse (z2) ainsi que celui de la roue (z1).
C'est donc un modèle quart de véhicule à deux
degrés de liberté. Il est régis par des équations
linéaires à coefficients constants;
La dynamique du système est décrite par les
équations différentielles suivantes :

I
I
I I I F
I I I F
Z H - - -
Z H H
(1.1)

Z -â I F F - 1 F F
1 1 F F - 1 1 F F
z -É
Les équations sont obtenues en additionnant les forces
appliquées sur les masses suspendue et non suspendue.
Les forces des ressorts et des amortisseurs sont données
par:



7
Z -â I l F 1 F F (1.2)
I E F F - 1 1 F F
z -É
Avec :

: Sont respectivement les coefficients de raideur et
d'amortissement verticaux de la suspension.
|
: Sont respectivement les coefficients de raideur et
d'amortissement verticaux du
|
|
pneu.
|

: La force développée par l'actionneur.

N.B. Le temps apparaît comme une
variable qui évolue continûment. Sur un horizon de durée ,
la variable prend toutes les valeurs de cette période en croissant.
Les équations différentielles obtenues ci-dessus
(1.1) peuvent être mis sous forme d'état.
1.3.2. Mise sous forme d'état
1.3.2.1. Le formalisme d'état [1]
Le formalisme d'état est une vision élargie de
la théorie des systèmes reposant sur le concept d'énergie.
La démarche est naturelle et complète puisque découlant
d'une logique considérant que l'évolution de tout système
est directement liée à celle du volume énergétique
qu'il renferme. Pour un système considéré, ce volume
représente l'état du système alors spécifié
par des grandeurs caractéristiques ; modifier l'évolution revient
donc à agir sur l'état grâce aux facteurs d'énergie
potentielle et cinétique que sont les grandeurs
caractéristiques.

Il s'agit de la formalisation des équations
linéaires sous forme matricielle pour représenter la dynamique du
système. Cette représentation fait appel aux
propriétés de l'algèbre matricielle linéaire pour
mener une étude plus fine du système considéré.
1.3.2.1.1. Équations d'état

L'équation d'état se présente comme une
forme d'une équation différentielle du premier ordre.
L'équation prend la forme suivante :
= [ ] H 2 (1.3)

Avec :
: Vecteur d'état à n composantes, tel que :


Z , KKI 2 (1.4)
: Vecteur d'entrée à r composantes, tel que :

Z , KKI 2. (1.5)

: Matrice d'évolution du système, carrée de
dimension (n x n).
: Matrice d'application de la commande, de dimension (n x r).
N.B. La dimension d'une matrice est
donnée par: (nombre de lignes, nombre de colonnes).
1.3.2.1.2. Équation d'observation
Les grandeurs d'état ne sont pas nécessairement
celles intéressant l'utilisateur du système ;
toutefois, la
simple raison suffit à comprendre que les variables choisies ou
désignées comme


9
sorties sont fonction de l'état et des entrées.
L'équation d'observation détermine alors les relations qui
existent entre ces diverses grandeurs, soit :
Z , 2 H , 2 (1.6)

Avec :
: Vecteur de sortie ou d'observation à m composantes, tel
que :



Z , KKK 2 (1.7)
: Matrice d'observation, de dimension (m x n).
: Matrice de transmission directe, de dimension (m x r).
? En pratique, on repère le nombre de grandeurs
d'état d'un système au nombre
d'éléments susceptible d'accumuler de
l'énergie, potentielle ou cinétique.
1.3.2.2. La formalisation des équations sous forme
d'état
Pour formuler la dynamique du système en fonction de
variables d'état, nous débutons par
définir le vecteur d'état i F.
Suivant la figure 1.1, Les deux masses et la liaison
élastique sont les éléments susceptibles d'accumuler
respectivement de l'énergie cinétique et de l'énergie
potentielle. Le vecteur d'état le plus naturel est donc, constituer de
quatre variables: la vitesse de déplacement vertical de chacune des
masses, l'effort transmit par le débattement vertical (ressort) de la
suspension et l'écrasement vertical du pneu. Le vecteur d'état a
été choisi tel que :

I E F FI E F F
I F Z E F f F , , E F 1 1 , EN1UF
Par la suite, les équations sont
décomposées en fonction du vecteur d'état I F, de
l'entrée contrôlée et de l'entrée perturbatrice F F
. L'équation d'état associée aux équations (1.1)
est sous la forme.

P F Z [ ] I F H 2 I F H 2 f F EN.9F
Avec les matrices suivantes :

0
0
L
1
-N
0
0
I
0
- /
z
z
z
10)
0
0
- /
0
N1
0
0
1
-I H FT
-N
I-


10
Le vecteur d'entrée , I F I F2 est constitué de la
variation du profil de la route vertical et
de la force active produite par l'actionneur (commande).
Afin de déterminer la qualité de la suspension,
il est nécessaire de définir des critères, ces
critères permettent de caractériser les performances de la
suspension. Rappelons que dans ce chapitre, nous nous intéressons
uniquement à l'analyse en boucle ouverte (sans contrôle). Le
système est donc soumis à la seule sollicitation externe, qui est
le profil de la route vertical.

1.3.2.3. Critères de performances
Dans la conception des systèmes de suspension des
véhicules, l'objectif double est d'assurer une bonne isolation
vibratoire vis-à-vis des sollicitations de la route pour le confort des
passagers et de maintenir un niveau d'adhérence au sol suffisamment
important pour garder le contrôle du véhicule en toute
sécurité.
Les critères de performance sont spécifique aux
suspensions et concerne principalement le confort, la tenue de route et le
débattement des suspensions. Nous présentons dans cette partie
des critères usuels de la littérature portant sur l'étude
d'un modèle quart de véhicule à deux degrés de
liberté équipé d'une suspension active. Ils permettent de
définir les performances nominales du système,
c'est-à-dire, les performances obtenues pour un système nominal
sans incertitudes.
1.3.2.3.1. Confort
La notion du confort est liée au bien-être des
passagers dans le véhicule. Sur mauvaise route, les
irrégularités de la route excitent en déplacement les
ressorts. Ces derniers transforment par leur compression ce déplacement
en effort qui se traduit par l'accélération verticale de la
caisse, et qui affecte le confort. Selon l'accélération à
laquelle est soumis le passager, ce dernier peut ressentir des malaises.
Lorsque l'accélération varie à une certaine
fréquence, des malaises, dus aux vibrations de certains organes du corps
humain, peuvent être ressentis. De plus, l'allongement de la durée
d'exposition aux vibrations augmente sa sensibilité. Pour un meilleur
confort vertical, l'accélération subie par le passager doit
être minimisée.
1.3.2.3.2. Tenue de route
La tenue de route peut être définie par l'aptitude
que possède un véhicule à adhérer à la
route. Elle représente la stabilité d'un véhicule.
Le pneumatique représente le seul lien du
véhicule avec le sol. Il génère des
forces
longitudinale (en cas d'accélération ou de freinage)
et/ou latérale (en manoeuvre de
changement de voie)
nécessaires donc aux changements et aux corrections de trajectoire.

12
Cette force d'adhérence au sol varie largement en
fonction de la force de contact (normale). Pour assurer la continuité du
contact entre le pneumatique et le sol (force du pneu constante), la suspension
doit réduire les variations de la force de contact appliquée sur
le pneu. Celle-ci passe par la minimisation de la composante dynamique de
l'écrasement du pneu. Une bonne tenue de route correspond à un
écart nul entre le déplacement vertical de la roue et du sol.
1.3.2.3.3. Débattement de la suspension
Une bonne isolation vibratoire vis-à-vis des
sollicitations de la route et un maintien de niveau d'adhérence au sol
suffisamment important sont réalisés sous un certain
débattement de la suspension. Or celui-ci est limité par des
butées de choc (compression) et de rebond (détente) pour des
aspects d'encombrement. Afin de réduire la hauteur du centre de
gravité et d'éviter l'impacte de ces butées, il est donc
important de prendre en compte le débattement maximal de la suspension
dans la synthèse d'une stratégie de contrôle afin
d'éviter les chocs qui surviennes lorsque la suspension arrive en fin de
cours. Le but est uniquement de le contraindre à rester dans un certain
intervalle tel que les butées ne soient pas atteintes.
1.3.2.3.4. Autre critère
Dans le cas d'une suspension active, on s'intéresse
aussi à la commande I F en vérifiant qu'elle satisfait les
contraintes technologiques de l'actionneur. En effet, ce dernier
génère une force qui est appliquée sur les masses
suspendue et non suspendue. Cependant, la puissance requise pour
générer cette force est limitée puisqu'elle provient
généralement du moteur. Il est doc important que celle-ci soit
également minimisée.
En résumé, dans le cas de la suspension active,
pour maximiser les performances, quatre critères déférents
doivent être minimisés :
1' Accélération verticale de la caisse 1'
Ecrasement du pneu
1' Débattement de la suspension 1' Force
générer par l'actionneur

Ces critères de performances nous servirons donc à
introduire le vecteur de sortie ou
d'observation F F.
Chaque critère de performance cité ci-dessus, on
lui associe une matrice d'observation et une matrice de transmission directe.
Ces matrices sont donnée par:

- Accélération vertical de la caisse I E F F
z x? (tF :
Z xM - - ]
Z x1v (1.11)



Z x z

- Ecrasement du pneu I F - F F Z f (tF :


Z xN 0 0 1]
Z x1v (1.12)
Z x1V]

- Débattement de la suspension F F - I F Z (tF :


Z xM 0 1 0]
Z [dV] (1.13)
z x1V]

- Force de l'actionneur I F :


Z xM 0 0 IVk
Z x1v (1.14)
Z xN]
l'équation d'observation est donnée par :

( FZ 3 2 E FH 3 2 E FH 3 2 E F (1.15)
avec les matrices suivantes:

0
0
/
0
0 0
=
0
0
- L
0
1
- L
0
0
=
=
0
0
0
0
NL
0
0
1
(1.16)
on obtient ainsi le système d'équation suivant :

(1.17)
E FZ 3 2 1 FH3 2 1 FH3 2 EF
E FZ 3 2 1 FH3 2 1 FH 3 2 EF

Le quadruplet lb ]z ,b ] ,3 z, 3 zF est une représentation
d'état du système

14
considéré. Cette représentation interne
n'est pas unique, il en existe une infinité qui sont équivalentes
et qui dépendent du vecteur d'état choisi.

(1.19)
E F Z I F H I F H I F
I F Z I F H I F H I F
> Avec l'approche par représentation d'état, les
problèmes de commande reviennent à
étudier les propriétés algébriques
des matrices réelles et de leurs valeurs propres.
Le système d'équations (1.17) peut également
être décrit de façon externe (matrice de transfert) :
1.3.3. Relation entrée-sortie
Le comportement dynamique d'un système linéaire
étant défini par l'évolution de ses variables
d'état, on sait que les variables d'observations (sortie) s'expriment
alors par une forme linéaire des variables d'état et des
variables d'entée (1.15).
La relation entrée-sortie temporelle (système
d'équations différentielles) est présentée sous la
forme opérationnelle en appliquant aux équations d'état et
d'observation la transformation de Laplace.

Soit I Fla transformé de Laplace de I F xM, oox ,
alors :

{ ( 1} Z I F - (1.18)
À l'instant Z 0 le système est au repos,
c'est-à-dire que son énergie emmagasinée est nulle, il en
découle ;
|
Z 0 , le système d'équation (1.17) devient :
|


16
que l'on peut encore écrire :

I F Z 1 1 F F (1.20)

d'où l'on tire la matrice de transfert :
I F Z , - H (1.21)

Avec F F Z , I F F F] , Z , z , Z , z

La matrice I F est une matrice rationnelle, c'est-à-dire
que ses composantes sont des fractions de polynômes en .

Il existe plusieurs façons de représenter la
matrice I F. Une possibilité consiste à calculer le
plus petit
commun multiple de tous les polynômes dénominateurs de I F, que
nous noterons



par I F. La matrice I F peut alors s'écrire :

I F Z E F (1.22)
E F
Où F F est une matrice polynomiale, c'est-à-dire
que ses composantes sont des polynômes
en . Une troisième
représentation I F consiste à utiliser des fractions de
matrices
polynomiales.

Nous pouvons alors écrire :
I F Z I I I F Z I F I F (1.23)

Où I F, I F, I F et I F sont des matrices polynomiales
avec I F et I F carrées
inversibles. Le couple I F, I F est une fraction de matrices
polynomiales à droite. Le
couple I F, I F est une fraction de matrices polynomiales
à gauche. En particulier, nous
avons :
I F Z CEi F F (1.24)



Les zéros du polynôme I F, c'est-à-dire les
valeurs pour lesquelles le polynôme s'annule,
sont les pôles du
système multivariables (racines de I F Z 0). Ce sont également
les zéros

des matrices polynomiales I F et I F.
> Avec l'approche par matrice de transfert, les
problèmes de commande reviennent à
étudier les propriétés algébriques
des matrices polynomiales et de leurs zéros.
Dans ce qui suit, nous introduirons une définition de
la notion de stabilité des systèmes linéaires et
invariants et les outils mathématiques de base nécessaires pour
l'analyse. Ces outils concernent essentiellement le calcul matriciel dans le
domaine complexe.
1.4. Notion de stabilité
La notion de stabilité est fondamentale dans le
développement des systèmes de commande et particulièrement
pour les architectures de commande à contre-réaction. En effet,
en l'absence de cette propriété qualitative, aucun système
n'est utilisable en pratique. Ce concept dont chacun a une compréhension
intuitive s'avère délicat à définir de
manière uniforme dans sa généralité. Il est le plus
souvent nécessaire de définir les propriétés
particulières du système que l'on souhaite caractériser
à travers une notion de stabilité qui sera adéquate.
Qualitativement, on dit qu'un système est dans un
état stable quand à la suite d'une
perturbation (de
durée limitée) il tend à retrouver son état initial
; cette définition est

18
satisfaisante pour les systèmes linéaires qui
évoluent selon une réponse transitoire amortie lorsqu'ils sont
stables.
Un autre point de vue peut être adopté où
la stabilité d'un système est définie simplement
au
sens d'un critère entrée-sortie ; un système sera
dit stable si sa réponse à toute entrée bornée
est bornée : on parle de stabilité _ f 1 I gl am
faél i gl am 1 l fél IF. Cette définition
ne met en jeu que les signaux exogènes ; aucune variable
interne n'est directement concernée.
1.4.1. Conditions de stabilité
Dans le cas des systèmes linéaires invariants I F,
la propriété de stabilité peut être testée
en
vérifiant la localisation des valeurs propres de la
matrice (racines du déterminant de la
matrice I C F, encore appelé polynôme
caractéristique) ou de façon équivalente, des
pôles de la matrice de transfert I F, dans une certaine
région du plan complexe. Pour les systèmes continus, cette
région est le demi-plan complexe gauche. D'autres régions plus
complexes peuvent également être considérées pour
assurer une certaine performance du système. Il existe différents
critères algébriques permettant de tester cette localisation des
pôles, comme par exemple, le critère de Routh-Hurwitz.
Un système au repos (conditions initiales nulles) est
stable au sens _ f1 si et seulement si

pour toute entrée I F bornée la sortie I F est
bornée.
Théorème 1.1 : un système i
of possédant entrées et sorties de matrice de réponse


impulsionnelle DI F est _ f 1 stable si et seulement s'il existe
une constante [ M telle que :
5 --fi I I CI CI II DD
Il est à noter que la stabilité EIED n'impose pas
à la réponse impulsionnelle d'être bornée.
Seule l'aire sous la courbe de la réponse impulsionnelle
doit l'être. Toutefois, cette
caractérisation n'est pas facile à utiliser en
pratique (calcul de l'intégrale de la valeur absolue de la
réponse impulsionnelle). Cela nous conduit à chercher une
caractérisation plus simple utilisant la fonction de transfert (matrice
de transfert cas multivariables) qui est l'équivalent
opérationnel de la réponse impulsionnelle, soit :
( ) = ( ) Fonction de transfert entre la é sortie et la
é entrée.


Cette caractérisation peut être
développée à partir de la localisation des pôles du
système dans

le plan complexe. Alors, le système est BIBO stable si les
pôles (zéros du polynôme ( )
définis au paragraphe 1.3.3), satisfont les trois
conditions du théorème 1.2.
Théorème 1.2 : le système
est BIBOstable si et seulement si :


) Les pôles de ( ) sont à partie réel
négative

) ( ) Ne possède pas de pôles à l'origine

) Les pôles à partie réel nulles doivent
être simples


20

1.5. Résultats de simulation
Nous présentons dans cette partie les résultats
de simulation des différents critères de performances. Les
valeurs des paramètres constants du modèle utilisés pour
la simulation sont données par le tableau suivant :
|
symbole
|
paramètre
|
valeur
|
unité
|
|
Masse non suspendue
|
30
|
kg
|
|
Masse suspendue
|
250
|
kg
|
|
Ressort de la suspension
|
20000
|
N/m
|
|
Ressort du pneu
|
200000
|
N/m
|
|
Amortisseur de la suspension
|
1000
|
N.S/m
|
|
Amortisseur du pneu
|
100
|
N.S/m
|
Tableau 1.1 - Valeurs numériques des paramètres du
modèle quart de véhicule
Afin d'analyser le comportement du système en boucle
ouverte (sans contrôle) sur le plan fréquentiel et temporel, nous
allons calculer ses valeurs propres, ensuite tracer les réponses
fréquentielles de chaque critère de performance ainsi que les
réponses temporelles.
? Valeurs propres
|
Valeurs propres
|
amortissements
|
Pulsations (rad/s)
|
|
-1.64 #177;48.43
|
0.195
|
8.59
|
|
-18.7 #177; 82.9
|
0.219
|
85
|
Tableau 1.2 - Pôles du modèle de la suspension quart
de véhicule en boucle ouverte
Le système possède quatre valeurs propres complexes
conjuguées à partie réelle négative, signifiant
qu'il est donc stable.
|
Partie imaginaire
|
100 80 60 40 20
0 -20 -40 -60 -80 -100
|
La figure suivante présente le diagramme pôles
zéros du système :

modes lents
modes rapides
-20 -18 -16 -14 -12 -10 -8 -6 -4 -2 0
Fartie réelle
Figure 1.2 - Diagramme pôles-zéros du
système
Nous constatons sur la figure 1.2, deux modes oscillatoires
(pôles complexes conjugués), ces modes correspondent
respectivement au mode lent de la caisse (masse suspendue) et au mode rapide de
la roue (masse non suspendue).
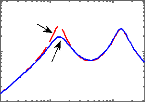
? Réponses fréquentielles
Comme nous l'avons vu au paragraphe (1.3.2.3), nous devons
surveiller l'accélération

verticale de la caisse ( ( ) ), le
débattement de la suspension ( ) - ( ) et l'écrasement

du pneu ( ) - ( ) .
La figure suivante montre les résultats
fréquentiels de simulation en boucle ouverte :

Diagramme de Bode du transfert Yacc(s)/w (s)
102
101
100
10-1
100 101
Magnitude (abs)

liagramme de Bode du transfert Ypneu(s)/w (s)
1
10-2
10-3
100 101
Magnitude (abs)
10
Fréquence (Hz) Fréquence (Hz)

Diagramme de Bode du transfert Ysusp(s)/w (s)
100
10-1
10-2
10-3
100 101
Magnitude (abs)

22
Fréquence (Hz)
Figure 1.3 - Réponse fréquentielle des
critères de performances
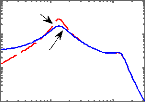
Le test temporel simule le passage du véhicule sur un
profil de la route ayant comme équation :

(
33
33333 333 3 33333 3 3 33 33 3 3 3 333 (1.26)
3 33333

Dans notre cas est considérée comme étant le
profil de la route 2 3, ceci s'explique par le fait que l'amortissement du pneu
peut être négligé.
Accélération Verticale de Caisse
0 0.5 1 1.5 2
temps (s)
x 10-4 Ecrasement du pneu
passif
0 0.5 1 1.5 2
tamps (s)
Amplitude (m)

4
2
0
-2
-4
-6
Amplitude (m/s2)
-0.2
-0.4
0.4
0.2
0

passif
x 10-3 Débattement de suspension
Amplitude (m)
-2
-4
4
2
0

passif
0 0.5 1 1.5 2
temps (s)

Figure 1.4 - Réponse temporelle des critères de
performances

24
1.6. Conclusion
Dans ce chapitre et dans un premier temps, nous avons
présenté brièvement les différents types de
suspension d'un véhicule ainsi que la structure du système
étudié. Également, la modélisation et la mise sous
forme d'état de la structure ont été abordées.
Nous avons abouti à un modèle de quatrième
ordre. Toutefois, ce modèle servant par la suite à l'application
des commandes ne représente pas parfaitement le modèle
réel.
Chapitre II
Outils d'analyse des systemes boucles

25
2. Introduction
Ce chapitre est consacré à un rappel des outils
d'analyse des systèmes bouclés. Après un bref rappel sur
l'analyse de la stabilité et de la performance du système
bouclé nominal, nous nous intéressons à la notion de
robustesse. Nous différentions deux types d'incertitudes : les
incertitudes non structurées, seulement caractérisées par
une borne de leur norme, et les incertitudes structurées qui
correspondent à une représentation beaucoup plus fine des
incertitudes. Nous rappelons le théorème du faible gain
appliqué à l'analyse de la robustesse face à des
incertitudes non structurées.
2.1. Propriétés du système nominal
Considérons le système bouclé de la Figure
2.1, où ( ) est un modèle sous forme de matrice
de transfert
d'un système multivariable, de dimension X et ( ) le correcteur de

dimension X . On appelle :





consigne ou signal de référence.
la sortie du système.
la commande (sortie du correcteur).
perturbations affectant la sortie du système. des bruits
de mesure.

= - l'écart d'asservissement.

Figure 2.1 - Schéma bloc pour l'étude de la
performance nominale


27


29


31

( ) = ( )'( ) ( )'( ) ) : ) (2.6)
( )
Avec : ( ) = ( )
La référence , la perturbation et le bruit de
mesure sont les signaux exogènes qui
agissent sur le système bouclé. Le signal est
généralement la consigne générée qui dirige
la sortie . Les signaux et sont en général les signaux non
désirés dont l'influence sur le système devrait être
limitée.
2.1.1. Performances nominales
La performance nominale consiste à assurer, pour le
système en boucle fermée correspondant au modèle
utilisé pour le calcul de la commande, des propriétés
convenables, notamment de précision et de rapidité.
Pour traduire mathématiquement ces
propriétés, un certain nombre de matrices de transfert
caractéristiques du système en boucle fermée sont
définies :
2.1.1.1. Matrices de sensibilité
On peut, à partir du schéma de la Figure 2.1,
exprimer les transformées de Laplace des
signaux ( , , et ) en fonction des transformées de Laplace
des signaux ( et ) :

( ) = + ( ) ( ) ( ) ( ) -- ( ) + ( ) ( ) ( ) (2.1)
( ) = + ( ) ( ) -- ( ) f. ( ) ( ) ( ) ( ) ( ) (2.2)
( ) = ( ) + ( ) ( ) -- ( ) -- ( ) (2.3)
Ces relations font intervenir les matrices de transfert suivantes
:

. Matrices de sensibilité en sortie:
( ) = ( ) ( ) appelée matrice de sensibilité en
sortie. Elle représente la

matrice de transfert entre la consigne et l'écart . Ainsi
que l'influence des perturbations sur la sortie et l'écart .

( ) = ( ) ( ) ( ) est appelée matrice de
sensibilité complémentaire en

sortie. Elle représente la matrice de transfert entre la
consigne et la sortie , ainsi que

l'influence des bruits de mesure sur la sortie et l'écart
.
2.1.1.2. Objectifs de commande
L'objectif de commande est de concevoir un correcteur ( ) qui
rend

( ) , ( ) et ( ) ( ) le plus faible possible, tout en assurant la
stabilité interne du
système bouclé.


Compte tenue du sens donné à ( ) et ( ) , il est
clair que lorsqu'en effectue la synthèse du correcteur ( ) on doit
chercher à :
· rendre ( ) le plus faible possible afin de réduire
l'influence des perturbations et d'assurer un bon suivi de consigne.
· rendre ( ) le plus faible possible afin de réduire
l'influence des bruits de mesure.
rendre ( ) ( ) le plus faible possible afin de réduire
l'effort de commande.

·
Le système en boucle fermée devra donc satisfaire
un certain nombre de spécification sur les
différents
transferts caractérisant le système. Ces transferts étant
liés, notamment à travers la

relation ( ) + ( ) = , il faudra donc établir un compromis
entre ces spécifications.

En effet, du fait de la contrainte ( ) + ( ) = , il est
impossible de rendre faible

simultanément ( ) et ( ) .
Cependant, Les perturbations sont des signaux qui agissent en
basses fréquences et le bruit en


haut fréquence. Il est donc possible de concevoir un
correcteur ( ) qui rend faible ( ) en basse fréquence et ( ) en haute
fréquence.

( )
- Comportements de ( )
Ces deux matrices de sensibilité s'expriment uniquement en
fonction de la matrice de transfert
de la boucle ouverte ( ), définie par:

( ) = ( ) ( ) (2.4)
Dans les zones où la boucle ouverte présente un
gain élevé, ce qui se produit en général aux

basses fréquences, ( ) ) ( ) ( ) .
Réciproquement, dans les zones où la boucle ouverte
présente un gain faible, ce qui se produit

en général aux hautes fréquences, ( ) et ( )
( ) ( ).
2.1.2. Stabilité nominale [8]
Soit le système bouclé de la figure 2.2, où
G(s) représente la matrice de transfert d'un système


multivariable de dimension x , et ( ) le correcteur de dimension
x ; et sont
respectivement la référence et la sortie
reçue du système bouclé.

+
( )
( )
-

Figure 2.2 - Schéma bloc pour l'étude de la
stabilité nominale
2.1.2.1. Critère de Nyquist (cas multivariable)
Le critère de Nyquist est un critère graphique
qui permet de ramener l'étude de la stabilité d'un système
en boucle fermée à l'étude de certaines
caractéristiques de la réponse fréquentielle de la
fonction ou matrice de transfert en boucle ouverte.
( )


+
-



Figure 2.3 - Bouclage d'une matrice de transfert ( )


( ) = ( ) ( ) est le transfert en boucle ouverte, supposée
strictement propre ( ( )

est matrice carrée de dimension ).
Pour appliquer correctement le critère de Nyquist, il faut
s'assurer qu'il n'y ait pas de simplification pôle/zéros instables
dans la chaine d'asservissement (modes cachés).
Théorème 2.1 : (critère de
Nyquist multivariable) - dans le cas où la matrice de fonctions
de
transfert ( ) ne possède pas de pôles imaginaires purs, le
système bouclé multivariable
(figure 2.3) est stable si et
seulement si l'image du contour d'exclusion (figure 2.4) de

Nyquist par det + ( ) encercle l'origine (dans le sens inverse
des aiguilles d'une

montre) un nombre de fois égale au nombre de pôles
instables de ( ).

( ) ( )
( ) det + ( ) ( )
Figure 2.4 - Critère de Nyquist multivariable
Contrairement à ce que suggère
l'énoncé du critère de Nyquist, son principal
intérêt n'est pas, en général, de vérifier
à partir de la boucle ouverte si le système en boucle
fermée correspondant est stable ou non. On peut en effet aisément
déterminer si le système en boucle fermée est stable en
calculant ses pôles. L'intérêt du critère de Nyquist
est autre et double. Dans le contexte de la recherche d'un correcteur qui
stabilise un système , le critère de Nyquist appliqué
à = permet de choisir graphiquement de façon à assurer la
stabilité du système bouclé. L`autre grande application
est d'étudier pour un système bouclé stable ses marges de
stabilité (marges de phase et de gain).
L'application du critère de Nyquist est complexe. En
pratique, on utilise le plus souvent la méthode dite du faible gain.
2.1.2.2. Théorème du faible gain [14]

Supposons que ( ) et ( ) ont tous les pôles à partie
réelle négative, alors le système

bouclé de transmittance en boucle ouverte ( ) = ( ) ( )
est stable si ? ?8 < 1.
Ou bien si : V JZ )
|
Où valeur singulière maximale de ( )
calculée à la pulsation
|
|
2.2. Notions de robustesse
La mise en équation d'un processus physique
nécessite des approximations, d'où résultent par
conséquent des incertitudes de modèle. De plus la synthèse
du correcteur fait généralement appel à un modèle
simplifié, dans lequel sont, par exemple négligées les
dynamiques hautes fréquences du système, celles des capteurs ou
actionneurs, d'éventuels retards purs...etc. Enfin, les
paramètres du modèle ainsi obtenus sont plus au moins
entachés d'incertitudes.
On dit qu'une propriété du système
asservi est robuste si cette propriété est garantie malgré
la présence d'incertitudes. En particulier, on cherchera au moins
à assurer au système asservi la robustesse de la
stabilité. Une exigence plus importante consiste à garantir la
robustesse d'une performance (telle que le taux de rejet d'une perturbation par
exemple).
2.2.1. Incertitudes de modèle [4]
On ne peut parler de robustesse que par rapport à un
objectif donné et aux types d'incertitudes considérées.
Dans le cadre linéaire, celles-ci sont généralement
regroupées en deux classes:
1' Incertitudes non-structurées:
Elles représentent les incertitudes influant sur le
système mais pour lesquelles aucune information structurelle n'est
disponible. Elles peuvent traduire par exemple des phénomènes
hautes fréquences comme des dynamiques négligées dans un
modèle (incertitudes dynamiques).
1' Incertitudes structurées :
Elles représentent des incertitudes dont on peut
déterminer l'influence sur la structure du système
étudié. Elles peuvent traduire des phénomènes
basses fréquences comme des variations paramétriques dues
à l'usure du système (incertitudes paramétriques).
Une représentation générale d'un
système soumis à des incertitudes de modèle est
donnée sur la figure 2.5.


?( )
( )


Figure 2.5 - Représentation
généralisée des incertitudes de modélisation

Toutes les incertitudes de modèle sont
rassemblées dans la matrice L( ). La matrice de
transfert ( )
modélise les interconnexions entre les entrées , les sorties , et
les signaux


et qui permettent de faire intervenir les incertitudes.
En écrivant les relations entre les
déférents signaux :

( ) = ( ) ( ) + ( ) ( )
( ) = ( ) ( ) + ( ) ( ) (2.5)
( ) = i( ) ( )

On calcul le transfert entre et :


33

L'expression (2.6) est appelée une Transformation
Fractionnaire Linéaire LFT. Elle est


notée ,i(s)
Pour écrire l'expression (2.6), il faut que la matrice (
)L( ) inversible pour
presque tout .

L'étude de la robustesse consiste à chercher
à garantir une propriété particulière (par exemple
la stabilité) pour un ensemble d'incertitudes L( ). On peut imaginer 2
degrés de complexité différents pour aborder ce
problème :
- Soit en ignore la structure de i ( ), en cherchant simplement
quelle est la plus grande
valeur admissible de sa norme. L'outil adéquat pour
traiter le problème de cette façon est la norme 8.
- Soit on prend compte de la structure de L( ), ce qui conduit
à des résultats plus
précis. Il faut pour cela définir un nouvel outil :
la valeur singulière structurée.
Remarque :


Si la propreté qu'on cherche à garantir est la
stabilité, et si par hypothèse ( ) et L( ) sont
stable, la
seul source d'instabilité provient du bouclage par L( ), et il est donc
équivalent

d'étudier la stabilité du système de la
figure 2.6, avec ( ) = ( ).

i( )
( )
Figure 2.6 - Schéma d'analyse de la robustesse de la
stabilité
2.2.2. Robustesse en stabilité : analyse non
structurée
Nous faisons l'hypothèse que le système nominal
est stable. Notre but est alors de vérifier que le système
demeure stable en présence d'une incertitude vérifiant 2.6. Une
solution simple à ce problème est donnée par le
théorème du faible de gain, qui donne une condition
nécessaire et suffisante de stabilité.
Théorème 2.2 : (théorème du
faible gain) - Si ( ) et L( ) sont stables, le système de
la figure 2.6 est stable pour tout L( ) tel que IIL( )II()
< 1 si et seulement si

II ( )ILo ~ 1 V JZ )
Chapitre III
Commandes linealres (LORI LOG,
LQGILTR)

35
Dans ce chapitre, nous nous penchons sur l'aspect
contrôle optimal de la suspension active par les commandes
linéaires (LQR, LQG, LQG/LTR). Dans un Premier temps, nous
présentons la théorie du contrôle optimale de chacune de
ces techniques de commande. Ensuite, chaque stratégie de contrôle
est appliquée au modèle quart de véhicule et
comparée à la suspension dite passive (en boucle ouverte).
3.1. Introduction
3.1.1. Contrôle optimal
La théorie de contrôle moderne se présente
comme la synthèse de la matrice de gain du contrôle par retour
d'état. Le contrôle intervient dans l'équation
d'état comme une donnée que l'on peut choisir, en imposant une
énergie de contrôle, afin de minimiser l'énergie
mécanique de la structure. Le problème du contrôle optimal
consiste essentiellement à déterminer le contrôle *( ),
admissible, apte à conduire le système vers un état
désiré *( ), tout en minimisant une fonctionnelle coût.
Afin de déterminer la solution d'un problème du contrôle
optimal, il existe plusieurs approches dont deux sont principales, la
première, constituée de la théorie de Hamilton-Jacobi,
consiste à établir des conditions suffisantes d'optimalité
global et la deuxième se base sur le principe de minimum de Pontriaguine
qui est un principe de variation, le contrôle optimal
doit minimiser une fonction appelée Hamiltonien.
3.2. Commande Linéaire Quadratique
3.2.1. Formulation du problème de commande (LQR)
Nous considérons le système linéaire
continu, invariant dans le temps, stabilisable et observable décrit par
les équations d'états suivantes :

( ) = ( ) + ( )
( ) = ( ) + ( ) (3.1)
( ) = ( ) + ( )
où :





( ) : Vecteur d'état, de dimension x 1.

( ) : Vecteur de commande, de dimension x 1.


( ) : Vecteur de sortie ou d'observation, de dimension x 1. ( ) :
Vecteur de sorties contrôlées, de dimension x 1.

, , , ,

,
Sont des matrices de dimensions appropriées
indépendantes du temps.
La synthèse linéaire quadratique
dénommée LQ ou LQR (linear quadratic regulator) consiste
en la recherche d'une matrice gain , telle que la commande par
retour d'état ( ) =
- ( ) stabilise le système et minimise
l'expression quadratique à horizon infini [1] de la
fonction coût suivante :

8
( ( ) ( ) + ( ) ( ))
2
=
1
(3.2)

2 ( ( ) ( ) + ( ) ( ) + ( ) ( ) + ( ) ( ))
=
1
(3.3)
où les matrices de pondérations ,
, p p
satisfont :


= ( + )
= ~ 0, = > 0, =
, =
que l'on peut réécrire sous la forme:




Est une matrice carrée symétrique définie
semi-positive et est une matrice symétrique définie positive. , ,
Sont respectivement les matrices de pondération sur l'état, de
couplage état-action et sur l'action.


Comme nous l'avons vu précédemment, l'objectif de
la commande quadratique est de minimiser une fonctionnelle définie par
l'équation (3.2) à l'aide de la matrice gain optimale
placée dans la boucle de réaction. La solution à ce
problème d'optimisation à horizon infini1 est
donnée par l'expression de suivante :
= ( + ) (3.4)

où est une matrice constante, solution de
l'équation algébrique de Riccati suivante :
+ - + = 0 (3.5)
Avec = -
, = p - -

37
L'obtention du gain passe donc par la recherche de la solution
symétrique définie
positive de l'équation de Riccati (3.5). La structure du
système de commande est conforme au schéma fonctionnel suivant
:

( ) = 0 +
+
+
+


( )


( )
Figure 3.1 - Schéma général de la commande
linéaire quadratique (LQR).
1 Lors de contrôle a horizon infini, aucune
condition n'est imposée sur l'état final

La force de cette méthode réside dans sa
simplicité, mais c'est aussi sa faiblesse, car à tout instant,
l'intégralité du vecteur d'état doit être
observée, ce qui n'est pas réalisable sur des systèmes
mécaniques complexes. Dans la majorité des problèmes de
commande, on ne dispose que d'une connaissance partielle du vecteur
d'état. Dans le cas de la suspension active, la déflexion du pneu
en est un bon exemple.
3.3. Commande linéaire quadratique gaussienne
(LQG)
Dans le cas de la commande LQR, la loi de commande est
basée sur la représentation d'état du système. La
difficulté de mesurer l'état ( ) fait que l'on
préfère utiliser la commande LQG. Cette dernière est bien
adaptée lorsque l'état du système n'est pas directement
mesurable ou que les mesures sont affectées par le bruit, et la
synthèse de cette commande prend en compte les propriétés
statistiques de perturbations, sans affecter la stabilité.
La synthèse LQG consiste donc à rechercher,
à partir de cette mesure partielle, un régulateur qui minimise un
critère quadratique de nature stochastique.
La commande LQG associe un observateur d'état
basé sur le filtre de Kalman à la commande LQR. L'observateur est
un système dynamique, dont les entrées sont constituées de
l'entrée et de la sortie du système à commander, et qui a
pour fonction de reconstruire l'état du système.
3.3.1. Formulation du problème de commande
(LQG)
Soit le système linéaire décrit par les
équations suivantes :

( ) = ( ) + ( ) + ( ) (3.6)
( ) = ( ) + ( )

où et représentent respectivement les perturbations
sur le modèle d'évolution et les bruits de mesures sur . Ils sont
supposés être blancs centrés. Il vient alors :

[ ] = 0, [ ] = 0 (3.7)


Nous introduisant alors les matrices de variance pour la variance
du bruit d'état et pour
la variance du bruit de mesure, et la matrice de covariance pour
la corrélation entre les


:
bruits d'état ( ) et de mesures ( )

=
( ) = [ ] = ~ 0 , ( ) = [ ] = ~ 0 ( , ) = [ ]

39
Avec [...] l'opérateur espérance
mathématique.

On note aussi = la matrice de covariance du bruit
d'état.


Le problème de commande LQG est de déterminer la
loi de commande optimale *( ) qui minimise le critère suivant :
1
= Iim
-*8
( + ) (3.8)
Avec ~ 0 > 0
3.3.2. Synthèse d'une commande LQG [13]

La solution de ce problème est connue sous le nom du
théorème de séparation. Ce théorème
établit que la commande optimale est obtenue :
1. En recherchant l'estimé de soit de telle sorte que :
{[ ( ) - )] [ ( ) - )]}
est minimale. L'estimateur d'état optimal est donner par
le filtre de Kalman (il est
indépendant de et ).
2. En employant cet estimé pour résoudre le
problème de commande optimale linéaire
déterministe dans le cas de la régulation
(méthode LQR), c'est-à-dire et sont ignorés.

Ainsi, le problème de la commande LQG et sa solution
peuvent être séparés en deux étapes distinctes,
comme le montre la figure suivante :

-
Système
Filtre de Kalman


( ) ( )
Figure 3.2 - Théorème de séparation

Où = - Le contrôle est donc proportionnel à
l'estimateur d'état du système.
3.3.3. Structure de la de commande LQG


Le régulateur LQG qui réalise l'optimisation du
critère quadratique (3.8), est constitué de l'association d'un
retour d'état et d'un filtre de Kalman , soit :
?
= -
) = ) + ( ) + - )
(3.9)
Où désigne le gain de l'observateur de Kalman,
calculé de telle sorte qu'il minimise la

quantité : {[ ( ) - )] [ ( ) - )]}
Le gain du contrôle optimal et du filtre sont donnés
par:



= ( + ) (3.10)
= ( + ) (3.11)

Où et sont solution des deux équations de Riccati
suivantes :
( - ) + ( - ) - + - = 0 (3.12)
( - ) + ( - ) - + - = 0 (3.13)

Avec = > 0 représentant la covariance de l'erreur
d'estimation - )
régime permanent.

41
Si l'état du système est entièrement
mesurable, le filtre de Kalman n'est pas nécessaire. On

obtient alors le régulateur en appliquant directement la
commande ( ) = - ( ).
Lorsque l'état du système n'est pas
entièrement mesurable, on implante la commande
par
l'intermédiaire d'un observateur. Le correcteur équivalent
( ) réalisant le rebouclage


( ) = - ( ) ( ) est alors :
( ) = - ( - + + ) (3.14)
La structure de la commande LQG est illustrée par la
figure suivante :
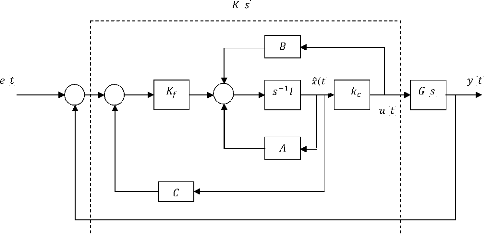
( ) = 0
+ + +
+
-
+
+
( )
)
-
( )
( )
( )

Figure 3.3 - Structure d'un régulateur LQG
3.4. Commande LQG/LTR (Loop Transfert recovery) [13, 5]
La présence d'un observateur fait perdre les
propriétés de robustesse de la méthode LQR. Pour se
remédier a ce problème la synthèse d'une commande de type
LQG qui recouvre asymptotiquement soit les propriétés de
robustesse de la méthode LQ, soit celles du filtre de KALMAN est
nécessaire.
La méthode LTR (recouvrement du transfert de la boucle)
fait tendre asymptotiquement le transfert de boucle de la méthode LQG
afin de se rapprocher du transfert qui serait obtenu avec un réglage LQ
qui présente d'excellentes marges de stabilité.
3.4.1. Formulation du problème de commande
(LQG/LTR)
La méthode LTR ne concerne que les systèmes propres
définis par la représentation d'état ( , , , ) et qui
vérifie :
1' = 0 (strictement propre).
1' ( - ) à minimum de phase.
?

= (nombre égal d'entrées et de sorties).
3.4.1.1. Recouvrement en entrée

Cette première approche consiste à effectuer le
réglage des matrices et du filtre de

Kalman à partir d'un réglage nominale et en faisant
augmenter le paramètre du
nouveau réglage :

= +
, =
(3.15)

Afin que le transfert de boucle ( ) ( ) recouvre asymptotiquement
le transfert de


boucle - ( - ) de la méthode LQR.
uirn 8 ( ) ( ) = - ( - ) (3.16)
où

( ) = - ( - + + ) , ( ) = ( - ) (3.17)
3.4.1.2. Recouvrement en sortie
Cette seconde approche consiste à régler les
matrices et du retour d'état LQ à partir d'un

43

réglage nominale et en faisant augmenter le
paramètre du nouveau réglage :
= (3.18)

= +
,


Afin que le transfert de boucle ( ) ( ) recouvre asymptotiquement
le transfert

- ( - ) du filtre de Kalman.

uim
-*8
( ) ( ) = -- ( - ) (3.19)
3.4.2. Synthèse d'un correcteur LQG/LTR
La démarche à suivre pour la synthèse du
correcteur consiste à :
1.

Synthétiser une loi de commande LQR par un choix
approprier des matrices et puis appliquer la première approche.
2.

Synthétiser le filtre du Kalman par un choix
approprié des matrices et puis
appliquer la deuxième
approche.

45
3.5. Application des commandes linéaires au
modèle quart de véhicule
L'ensemble contrôleur et modèle de la structure peut
être représenté par le schéma bloc suivante :

+
-
( )
( )

Figure 3.4 - Schéma bloc du régulateur et du
modèle.
3.5.1. Objectifs de contrôle
L'objectif double est d'assurer une bonne isolation vibratoire
vis-à-vis des sollicitations de la route pour le confort des passagers
et de maintenir un niveau d'adhérence au sol suffisamment important pour
garder le contrôle du véhicule en toute sécurité.
Comme nous l'avons vu au chapitre 1 (paragraphe 1.3.2.3.),
nous devons donc surveiller l'accélération verticale de la
caisse, le débattement de la suspension et l'écrasement du pneu.
On s'intéresse aussi à la commande en vérifiant qu'elle
satisfait les contraintes technologiques de l'actionneur.
3.5.2. Contrôle LQR
Le critère de performance s'écrit en fonction des
variables d'état sous la forme suivante :
+ + + ) (3.20)
1

2 (

|
est ensuite converti sous forme matricielle
|
|

+ + + ) (3.21)
1

2 (
Nous obtenons les matrices , et des équations:

(3.22)
0 0 0
- -
0 -
0 -
0
?
?
?
?
?
?
?

= - -
(3.23)


= + (3.24)
Les poids sont donnés dans le tableau suivant :
|
Poids
|
Variable
|
Critère
|
valeur
|
|
|
Accélération du châssis
|
1
|
|
|
Déflexion de la suspension
|
10 000
|
|
|
Déflexion du pneu
|
100 000
|
|
|
Force de l'actionneur
|
0.0001
|
Tableau 3.1 - Poids des pondérations multipliant les
critères Après résolution de l'équation de Riccati
nous obtenons :

= (-1431.1 22.1 761.4 642.1) (3.25)
alors :
* = 1431.1 * - 22.1 * - 761.4 * - 642.1 * (3.26)





3.5.3. Contrôle LQG

Les matrices de pondération , , et sont choisies comme
suit:
|
0
1
0
0
|
0
0
1
0
|
0
0
0 ,
1
|

1
10 0
0 0
0
0 0
0 1
,
= 100 *
0
1 0
0 0
0
0 0
0 1
= 1 (3.27)

10


10
10

47
10
Après résolution de l'équation de Riccati
nous obtenons :
(3.28)

= 10 *
0.0372
-2.2349
0.0644
-0.2107

alors, le correcteur de la loi de commande LQG est donné
par sa fonction de transfert :
1.888
· 10 + 1.431
· 10 + 1.347
· 10 +
3.454
· 10





( ) =
(3.29)
+ 106.9 + 1.227
· 10 + 7.376
· 10 + 2.605
· 10
3.5.4. Contrôle LQG/LTR
L'objectif de la procédure de réglage LTR est de
restaurer les marges de stabilité initiales du retour d'état LQR
(ou dualement du filtre de Kalman).
L'inconvénient de cette approche réside dans le
fait qu'augmenter revient à accorder plus d'importance au bruit
d'état, et donc à dégrader le filtrage de bruit de mesure.
Pour pouvoir donc limiter la sensibilité à ce bruit, on va
tolérer en pratique, un écart entre la matrice de transfert du
régulateur LQR et celle du régulateur LQG, il convient donc
d'arrêter l'augmentation de lorsqu'on a obtenu le recouvrement dans une
bonde de fréquence garantissant le niveau de performances et de
robustesse souhaité.


On utilisant un recouvrement en entrée, le tableau suivant
donne les marges de stabilité obtenue pour les différentes
valeurs du paramètre :
|
Marge de gain (dB)
|
Marge de phase ( °)
|
|
0
|
4.1865
|
Co
|
|
10
|
4.1867
|
Co
|
|
10
|
10.1149
|
Co
|
|
10
|
824.9638
|
Co
|

Tableau 3.2 - Marges de stabilité pour
déférentes valeurs de .
La valeur du paramètre , qui permet de satisfaire le
compromis performance/robustesse est

de = 10 .
Alors, le correcteur de la loi de commande LQG/LTR est
donné par sa fonction de transfert :
1.571
· 10 + 6.848
· 10 + 1.172
· 10 -
6.226
· 10





( ) =

+ 77.77 + 9583 + 1.974
· 10 + 3.149
· 10





Le tableau 3.3 permet de visualiser les marges de
stabilité du transfert de boucle ( ) ( )
pour les différentes lois de commande appliquée
:
|
Lois de commande
|
Marge de gain (dB)
|
Marge de phase ( °)
|
|
LQR
|
Co
|
Co
|
|
LQG
|
2.3124
|
Co
|
|
LQG/LTR
|
10.1149
|
Co
|

49
Tableau 3.3 - Marges de stabilité obtenus pour les
différentes lois de commande.
0.025 * (1 - cos(8 * * )) si 0 ~ ~ 0.25 (3.30)
0 si non


( ) =
3.6. Simulations
Dans ce qui va suivre, nous allons présenter les
différents résultats de simulation obtenus avec les lois de
commande élaborées précédemment pour le
modèle de la suspension active quart de véhicule.
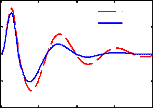
3.6.1. Résultats de simulation LQR
Les figures 3.5, 3.6 montrent les réponses
fréquentielles et temporelles des critères. Le test temporel
simule le passage sur une bosse d'amplitude maximale de 5cm. Ce test permet
d'analyser la sensibilité du système contrôlé en
présence de perturbations en entrée.
L'entrée de perturbation correspondant au profil de la
route est donnée par l'équation :

Diagramme de Bode du transfert Yacc(s)/w (s)
102
passif
101
actif
100
10-1
100 101
Magnitude (abs)
Diagramme de Bode du transfert Ypneu(s)/w (s)
1
passif
10-2
actif
10-3
100 101
Magnitude (abs)
10-
Frequence (Hz) Frequence (Hz)
|
Magnitude (abs)
|
100 10-1 10-2
10-3
|
Diagramme de Bode du transfert Ysusp(s)/w (s)
100 101
passif
actif
Frequence (Hz)
Figure 3.5 - Critères fréquentiels du
modèle quart de véhicule

51
|
Amplitude (rn/s2)
|
0.4
0.2
0 -0.2 -0.4
|
|
Amplitude (m)
|
4 2 0 -2 -4 -6
|
Accélération Verticale de Caisse
passif actif
0 0.5 1 1.5 2
temps (s)
x 10-3 Débattement de suspension
x 10-4 Ecrasement du pneu
passif actif
0 0.5 1 1.5 2
tamps (s)
Force de contrôle
Amplitude (N)
-10
-20
-30
10
0
passif actif
Amplitude (m)
-2
-4
4
2
0
passif actif
0 0.5 1 1.5 2
temps (s)
0 0.5 1 1.5 2
temps (s)

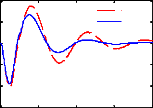
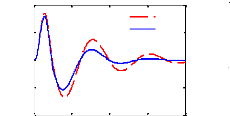
Figure 3.6 - Réponses temporelles du modèle quart
de véhicule avec le contrôleur LQR à

l'excitation ( )
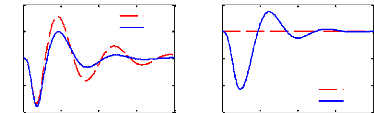
D'après la figure 3.5, on observe que la loi de
commande obtenue permet effectivement d'amortir la résonance de la masse
suspendue autour de 1 Hz, ce qui améliore sensiblement les performances
(confort en basse fréquences), sans pour autant détériorer
la capacité de filtrage en hautes fréquences.
Ainsi, d'après la figure 3.6, nous remarquons en effet
une atténuation rapide des oscillations comparativement à la
boucle ouverte, ce qui améliore aussi ses performances en temps de
réponse.
Le signal de commande est ajouté dans les figures de
réponses temporelles afin d'observer la force développée
par l'actionneur et son comportement.
3.6.2. Résultats de simulations LQG
Les figures 3.7 et 3.8 montrent les réponses
fréquentielles et temporelles des critères.
Diagrarwme de Bode du transfert Yacc(s)/w (s)
102
passif
101
actif
100
10-1
100 101
Magnitude (abs)
Diagranne de Bode du transfert Ypneu(s)/w (s)
1
passif
10-2
actif
10-3
100 101
Magnitude (abs)
10-
Frequence (Hz) Frequence (Hz)
100
Diagranne de Bode du transfert Ysusp(s)/w (s)
10-2
10-3
100 101
Magnitude (abs)
10-1
passif
actif
Frequence (Hz)
Figure 3.7 - Critères fréquentiels du
modèle quart de véhicule

53
Amplitude (m/s2)
0.4
0.2
4
2
passif actif
Accélération Verticale de Caisse
x 10-4 Ecrasement du pneu
-0.2
-0.4
0
Amplitude (m)
-2
-4
-6
0
|
Amplitude (N)
|
20
10
0 -10 -20
|
0 0.5 1 1.5 2
temps (s)
|
Amplitude (m)
|
4 2 0 -2 -4
|
x 10-3Débattement de suspension
passif actif
0 0.5 1 1.5 2
temps (s)
0 0.5 1 1.5 2
temps (s)
Force de contrôle
passif actif
0 0.5 1 1.5 2
temps(s)
passif actif


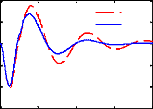
Figure 3.8 - Réponse temporelle du modèle quart
de véhicule avec le contrôleur LQG à
l'excitation ( )
Comparativement au cas passif, on constate que le
contrôle LQG permet aussi d'améliorer les critères
fréquentiels autour de la fréquence de résonance de la
masse suspendue ainsi que le temps d'atténuation des oscillations sans
pour autant détériorer la capacité de filtrage en hautes
fréquences. Cependant, il offre une marge de gain relativement
faible.
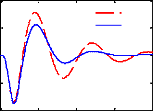
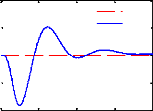
3.6.3. Résultats de simulations LQG/LTR
Les figures 3.9 et 3.10 montrent les réponses
fréquentielles et temporelles des critères.
Diagrannie de Bode du transfert Yacc(s)/w (s)
102
passif
101
100
10-1
100 101
Magnitude (abs)

actif
Diagramme de Bode du transfert Ypneu(s)/w (s)
1
passif
actif
10-2
10-3
100 101
Magnitude (abs)
10-

Frequence (Hz) Frequence (Hz)
Diagrannie de Bode du transfert Ysusp(s)/w (s)

100
Magnitude (abs)
10-1
10-2
10-3
100 101
passif
actif
Frequence (Hz)
Figure 3.9 - Critères fréquentiels du modèle
quart de véhicule

55
Accélération Verticale de la Caisse x 10-4
Ecrasement du pneu

Amplitude (m)
-2
-4
-6
4
2
0
passif actif
Amplitude (m/s2)
-0.2
-0.4
0.4
0.2
0
passif actif
0 0.5 1 1.5 2
0 0.5 1 1.5 2

temps (s)
x 10-3 Débattement de suspension Force de
contrôle
0 0.5 1 1.5 2
temps (s)
0 0.5 1 1.5 2
temps (s)

Amplitude (N)
-10
-20
20
10
0
passif actif
Amplitude (m)
-2
-4
4
2
0
passif actif
Figure 3.10 - Réponse temporelle du modèle quart
de véhicule avec le contrôleur LQG/LTR à
l'excitation (
)
Le contrôle LTR permet lui aussi d'améliorer les
performances de la suspension active. Il offre une légère
atténuation de la résonance de la masse suspendue mais le
débattement de suspension en basse fréquence est plus
raisonnable. Cependant, on remarque une légère
détérioration de la capacité de filtrage de
l'accélération verticale de la caisse ainsi que de
l'écrasement du pneu dans les moyennes fréquences.

57
3.7. Conclusion
Dans ce chapitre, l'étude nous montre clairement
l'apport de ces commandes linéaires en terme de minimisation des
vibrations liées au confort. Pour des considérations pratiques,
on a vu aussi que la commande LQ peut être implémentée via
un observateur. Néanmoins, une restauration des marges de
stabilité s'impose pour augmenter la robustesse du système.
Ainsi, la méthode LTR à été appliquée.
Notons qu'en pratique, les commandes linéaires
quadratiques, restent les plus utilisées, car elles présentent
l'avantage d'être faciles à implémentées et d'avoir
un gain fixe.
En résumé, nous pouvons affirmer, d'après
ce qui a précédé que les lois de commande
élaborées jusqu'ici sont valables sur le modèle
linéaire de la suspension active quart de véhicule. Notons aussi,
que la force de contrôle appliquée est plus que satisfaisante.
Chapitre IV
Synthese H_00


58
Dans ce chapitre, nous allons décrire la
synthèse 8 standard en présentant les outils
nécessaires à cette approche (les valeurs singulières
d'une matrice de transfert, la norme infinie d'un système
linéaire), la notion de problème standard et enfin nous
présentons une méthode de résolution par équations
de Riccati. Différentes simulations ont été
réalisées et commentées en fin de ce chapitre.
4.1. Introduction

4.1.1. La Synthèse 8
La synthèse 8 propose un cadre
général pour le calcul d'un correcteur, en manipulant des
concepts fréquentiels. Elle permet de prendre en compte des objectifs de
stabilité, de marges de stabilité et de modelage de
différents transfert, voir certains objectifs de robustesse, en retour
dynamique de sortie. Une vision plus réaliste est de considérer
cette approche comme une façon particulière de calculer un
correcteur, sans que toutes les demandes de performance et de robustesse soient
prises en compte a priori.
La recherche de la loi de commande du correcteur se fera
algorithmiquement par la résolution du problème d'optimisation
(minimisation de la norme 8 d'un critère mathématique).
La tache de l'automaticien sera donc d'établir le critère
mathématique qui reflète au mieux le cahier des charges.
4.1.2. Outils de calcul nécessaire à la
synthèse 8 [4]
a) Valeurs singulière d'une matrice de
transfert
Considérons un système linéaire invariant
avec un vecteur d'entrée ( ) et de sortie ( ) de
dimension
respectivement et . Soit ( ) sa matrice de transfert. En réponse
à une excitation



harmonique ( ) = , la sortie du système s'écrit
:
( ) = ( ) (4.1)
Pour un système monovariable, on définit à
partir de cette relation le gain du système à la
pulsation par le module I ( )I. Dans le cas multivariables, on
utilise la notion de valeurs
singulières, elles constituent une
généralisation de la notion de gain et définies comme
étant les racines carrée des valeurs propres positives de ( )
multipliée par sa tansconjuguée :

) ( (-- ) ) ( ) = ( )( (-- ) ) , = 1, min ( , ) (4.2)

Où est la é valeur propre.
On notera ) grande valeur singulière et ( ( )) la plus
petite :




) ) ) ) (4.3)
Remarque : Pour un système monovariable,
il n'existe qu'une valeur singulière, qui est donnée par:

) ) )I (4.4)
b) Norme 8 d'un système linéaire
invariant
Soit le système linéaire invariant décrit
par la représentation d'état :

( ) = ( ) + ( ) (4.5)
( ) = ( ) + ( )


De matrice de transfert ( ) = ( - ) + . Nous posons
l'hypothèse que le système est
stable. L'ensemble des matrices de transfert ( ) correspondant
à un système stable est noté usuellement R 8.

Pour toute matrice ( ) dans R , on définit une norme
notée I ( )I, et qui est appelée
norme 8. Celle-ci est calculée de la
manière suivante :

I ( )IL = ))| R (4.6)

La norme ( ) est donc la valeur la plus élevée du
gain du système sur l'ensemble des
pulsations . Sur la base de la
définition (4.6), on peut facilement obtenir une borne inférieure
de

( )?8 en cherchant la valeur la plus
élevé du 2ême membre de l'équation (4.6)
pour un ensemble de valeurs de choisies a priori. Mais si celui-ci
présente un maximum très »pointu», on risque de sous
évaluer la norme 8.
La propriété suivante fournit un majorant de la
norme , :


Propriété 4.1 : soit un
réel positif > ( ). Alors ( )?8 < si et seulement si la
matrice
Hamiltonienne :

= -
= -

-
=
-
(4.7)
n'a pas de valeur propre sur l'axe imaginaire.

Pour déterminer la norme 8 du système, il
suffit alors de rechercher le plus petit tel

que ( )?8 < . Pour cela on peut effectuer une
recherche linéaire sur le paramètre en

60
faisant par exemple une approche par dichotomie.



61
4.1.3. Formulation du problème 8[6, 3]
Toute méthodologie de commande avancée consiste
à trouver un régulateur ( ) qui permet de contrôler
efficacement le système, de telle sorte que le système en boucle
fermée ait de bonnes propriétés de performances et de
robustesse.

Sous sa forme la plus simple, le problème 8
est un problème de réjection de perturbations. A partir du
système exprimé sous la forme standard de la figure (4.1), il
consiste à minimiser l'effet d'une perturbation sur le comportement du
système. Son effet sur le système est mesuré par la norme
€ du vecteur de sortie (sorties à contrôler),
sachant que l'on peut agir sur le système par une commande
(éléments actifs) et que l'on dispose d'une observation
(mesures
disponibles). Il s'agit donc de synthétiser une loi de
commande = ( ) qui minimise

l'impacte de sur . On mesurera cet impacte par le rapport . La
stabilité interne du
système devra bien sûr être assurée.

( )
( )


Figure 4.1- Problème 8 standard
La matrice de transfert ( ) modélise les interactions
dynamiques entre deux ensembles
d'entrées et deux ensembles de sorties, tendis que ( )
désigne le correcteur que l'on cherche à calculer.
Le système (plant) admet pour équation
d'état :


?( ) = ( ) + ( ) + ( )
?( ) = ( ) + ( ) + ( ) (4.8)
( ) = ( ) + ( ) + ( )

Comme le système ( ) a deux entrées et deux
sorties, il peut être partitionné de la manière suivante
:

( ) =
( ) ( )
( ) ( )
(4.9)
Dans le domaine de Laplace, les équations du
système dynamique se réécrivent :

( )
t ( ) = ( ) ( ) (4.10)
( )
Ainsi, la matrice de transfert entre et du système
bouclé est donné par la Transformation Linéaire
Fractionnelle (LFT) :

( ) = ( , ) ( ) (4.11)

( , ) = ( ) + ( ) ( ) - ( ) ( ) ( ) (4.12)

Le problème décrit ci-dessus peut se formuler
mathématiquement comme suite:



63

? Etant donné > 0, existe-il un une loi de commande ( )
telle que :
1. Le système bouclé figure (4.1) soit stable de
manière interne (c.-à-d. tous les pôles
du
système bouclé sont à partie réelle strictement
négative).
2.

( , )?00 < .
Assure

Le correcteur permettant d'atteindre la plus petite valeur de
sera dit optimal. Cette valeur minimale, notée , peut être
approchée par dichotomie.


En pratique, le système généralisé
(dit augmenté) est en faite constitué du système
étudié ( )

et des pondérations fréquentielles ( ) et ( )
associé respectivement aux entrées
exogènes et aux sorties contrôlées ,
représentant les spécifications de performance. Soit :

( )
( )
( )
( )
( )

Figure 4.2 - problème 00 standard
incluant les pondérations
Ces pondérations en fréquences permettent de
privilégier certains transferts pour certains domaines
fréquentiels.
Deux approches peuvent être envisagées pour
résoudre le problème 00 standard. La
première approche est fondée sur la résolution des
équations de Riccati. Elle est aussi connue sous le nom de l'algorithme
de Glover-Doyle ou -itérations, apparue à la fin des
années 80. C'est la solution la plus simple et la plus fiable
numériquement. Une deuxième solution de ce problème de
commande 00 peut être aussi utilisée, elle est
basée sur la résolution d'un problème d'optimisation
convexe sous contraintes d'inégalités matricielles
linéaires (LMI). Nous présentons ci-dessous l'approche par
équations de Riccati.

4.1.4. Résolution du problème 8 standard par
Riccati [4]

Cette approche permet de résoudre le problème 8
standard définie plus haut, à partir de la
représentation d'état (4.13) du système augmenté .
Soit :

?( )
?( )
?( )
=
( )
( )
( )
(4.13)



Avec R ; R ; R ; R ; R .
Considérons les matrices symétriques = et Q = Q
ayant les mêmes dimensions que la
matrice . on note:

la solution symétrique définie positive, si elle
existe, de l'équation de Riccati :

+ - + = 0 (4.15)

de telle sorte que les valeurs singulières de ( - ) ont
une partie réelle strictement négative.
Le problème 8 standard a une solution si les
quatres hypothèses suivantes sont vérifiées :

H1) La paire ( , ) est stabilisable et ( , ) est
détectable : condition nécessaire et suffisante pour qu'il existe
un régulateur ( ) stabilisant de manière interne le
système en boucle fermée. Elle implique notamment la
stabilité des pondérations fréquentielles ( ) (figure
(4.2)).


H2) ( ) = et ce sont des conditions suffisantes pour assurer que
la loi
de commande ( ) est propre.

, + : garantit que la matrice de transfert ( ) entre
H3)
les entrées de commandes ( ) et les sorties à
réguler ( ) n'a pas de zéros sur l'axe imaginaire.

, + : assure que la matrice de transfert ( ) n'a
H4)
pas de zéros sur l'axe imaginaire.

Le théorème suivant donne les conditions
nécessaires et suffisantes pour résoudre le problème 8
standard. Ces conditions correspondent à un cas simplifié
pour lequel les formules sont simples.
Théorème 4.1 : Sous les
hypothèses H1 à H4, le problème de
commande 8 a une solution si et seulement si les cinq conditions
suivantes sont remplies :

( ) La matrice Hamiltonienne 8 =
-
propre sur l'axe imaginaire.
n'a pas de valeur

-
( ) Il existe une matrice 8 = ( ) 0 ; telle que + +

) + = 0
( ) La matrice Hamiltonienne 8 =
-
- -
n'a pas de valeur propre
( ) Il existe une matrice , = ( ) 0 ; telle que + + -



65
= 0
( ) ( 8 8) < Où représente le module de
la valeur propre maximale (rayon spectral).
sur l'axe imaginaire.


Le théorème suivant permet, alors, de calculer la
solution du problème 8 standard:

Théorème 4.2 : Sous les conditions
du théorème 4.1, le régulateur ( ) stabilisant le
système et

satisfaisant ( , )?8 < est donné par:

c C
- 0
8
(4.16)

Où
= +
8 - 8 - c C
(4.17)

o = ( - C ) (4.18)

La mise en oeuvre de cette solution consiste donc à
utiliser tout à d'abord les résultats du théorème
4.1 de façons à estimer la valeur minimale du niveau
d'atténuation . Cela se fait en utilisant l'algorithme de dichotomie. On
calcule ensuite le régulateur central en utilisant le
théorème 4.2 et la valeur obtenue.
Remarques :
·

L'ordre du correcteur est de , c'est-à-dire
l'ordre de ( ) soit le système à commander ( ) augmenté
des différentes pondérations (éventuellement)
introduites.
·


On peut essayer de rechercher le plus petit , noté tel que
le problème 8 standard
admette une solution à
l'optimum.


? La valeur peut être approchée par dichotomie, en
suivant le processus :

a. Choix d'un niveau de tolérance et de
deux valeurs et telles que, pour
, le problème 8 problème admette une
solution et que, pour = , le

=




67
problème 8 standard n'admette pas de solution;
b. On test si pour = , le problème 8 standard
admet une solution. Si
oui alors = sinon

= ;
c. Si - lors retourner à b.

d. Calcul de la représentation
d'état de la loi de commande permettant d'obtenir la
norme 8 proche de .


4.2. Application du contrôle 8 au modèle de la
suspension quart de véhicule

Après avoir présenté la synthèse
8 standard, nous allons dans cette section appliquer cette technique
de commande sur le modèle linéaire quart de véhicule afin
de synthétiser une loi de commande permettant d'assurer, à la
fois, un bon confort et une bonne tenue de route.
4.2.1. Mise sous forme standard

Pour pouvoir synthétiser une commande , il faut au
préalable mettre le système considéré
sous forme standard. Pour cela nous avons besoin de
déterminer quelles sont les entrées
exogènes , les
entrées de commande , les sorties à contrôler et les
sorties mesurées . Dans
notre cas la seule mesure disponible est le débattement
de la suspension ( ) - ( ) , qui est
mesurée par un capteur électronique auquel
s'ajoute un bruit de mesure. Celle-ci est à la fois facile à
effectuer sur un véhicule et utile pour le correcteur. Les
entrées exogènes sont le bruit de mesure d'une part et le profil
de la route d'autre part. La seule entrée de contrôle correspond
à la force de l'actionneur actif. Enfin, pour les sorties
contrôlées nous cherchons à limiter
l'accélération verticale de la caisse ( (
) ), l'écrasement du pneu ( ) - ( ) , le débattement
de
la suspension ( ) - ( ) et celui de la commande . Cependant, nous voulons
limiter ces
sorties différemment selon les fréquences. Les
sorties à contrôler correspondent donc à ces sorties
affectées de pondérations. Les fonctions de pondération
sont donc choisies de façon à améliorer les fonctions de
transfert dans les domaines de fréquence intéressants.
Le schéma suivant montre l'emplacement des fonctions de
pondérations fréquentielles permettant de gérer les
compromis.
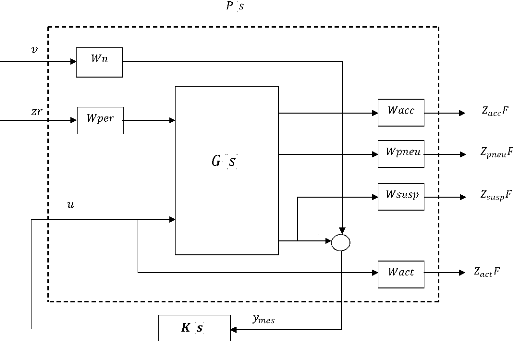
( )
( )
( )
+ +


69
Figure 4.3 - Mise sous forme standard du problème avec
les pondérations

Le système ( ) représente la dynamique du quart
de véhicule à 2DDL. Les pondérations fréquentielles
ajoutés aux entrées et sorties du système conservent les
fréquences prédominantes et atténuent les
fréquences moins importantes. Pour les critères de performance,
la pondération conserve les fréquences les plus sensibles et
atténue les fréquences moins importantes.
4.2.2. Choix des pondérations
L'objectif principal est de réduire
l'accélération de la caisse (pour le confort des passagers), de
réduire l'écrasement du pneu (pour garder le contrôle du
véhicule en toute sécurité), de réduire le
débattement de la suspension (contrainte matérielle), et la
commande en force de l'actionneur (afin de ne pas trop le solliciter en hautes
fréquences). Le filtrage du bruit de mesure n'étant pas notre
principal objectif, la pondération est très faible. A cet effet,
une pondération constante



est choisie pour le bruit de mesure. La pondération est
aussi choisie comme constante
pour l'écrasement du pneu. La nécessité de
conserver l'adhérence des pneus sur toute la gamme des fréquences
explique ce choix.
Comme les perturbations de la route sont importantes pour la
conception du contrôleur, la
pondération agissant ( ) - ( ) sur correspond à un
filtre passe bas avec une fréquence
de coupure de 1Hz. Il permet de modéliser la
densité spectrale de la route pour qu'elle soit représentative du
cas réel.
La pondération fréquentielle agissant sur ( ) - ( )
correspond à un filtre passe bas

avec une fréquence de coupure de 5Hz. Il permet de
contrôler la déflexion de suspension en basses fréquences
là où elle est la plus importante et facilement contrôlable
par l'actionneur. Il permet aussi de réduire la force appliquée
en hautes fréquences, car l'actionneur a une fréquence maximale
d'opération limitée. De plus, en pondérant la commande par
un passe haut ( ) pénalise l'utilisation de l'actionneur en hautes
fréquences.

La pondération agissant sur ( ( ) ) correspond au
filtre de sensibilité humaine.
Pour représenter l'importance relative de chaque
critère, un poids multiplie l'amplitude de chaque filtre. Le tableau
suivant donne les valeurs des poids utilisés :
|
poids
|
variable
|
critère
|
valeur
|
|
|
Bruit de mesure
|
0.0001
|
|
|
Perturbation de la route
|
1
|
|
|
Déflexion de suspension
|
25
|
|
|
Déflexion du pneu
|
6000
|
|
|
Accélération du passager
|
1
|
|
|
Force de l'actionneur
|
0.00000001
|
Tableau 4.1 - Poids des pondérations
Les pondérations choisies sont les suivantes :

= ; =
(4.19)

2
( ) = (4.20)
+ 2
Avec = 1
2
( ) = (4.21)
+ 2
Avec = 5
12
(4.22)
+ 30.02 + 901.3


Avec = 30.02 ; = 4.78 ; = 0.5



+ 2
= (4.23)
+ 2
Avec = 3 , = 30

71
Nous pouvons construire le système augmenté ( ) en
utilisant la commande sysic du <<robust control
Toolbox>> de <<Matlab>>.
Le correcteur est synthétisé avec la commande
<<hinfsyn>> sous Matlab. Il est donné
par sa
fonction de transfert :








4.134 10 + 1.327 10 + 1.433 10 + 9.434 10 + 4.094 10 + 1.169 10
+

2.164 10 + 2.203 10 + 6.533 10







+ 2.006 10 + 2.011 10 + 2.678 10 + 7.173 10 + 6.718 10 + 2.948 10
+
7.488 10 + 1.012 10 + 3.267 10
Après avoir réalisé la synthèse du
correcteur, nous obtenons = 15.133. Il faut noter que
l'ordre du correcteur ( ) est la somme de celle du modèle
et des filtres. Par conséquent, le correcteur obtenu pour le quart de
véhicule est d'ordre 9.
Les pondérations fréquentielles sur
l'accélération de la caisse, sur l'écrasement du pneu, sur
le débattement de la suspension et de la force de l'actionneur sont
représentées sur la figure 4.4.
Bode des ponderations Wpneu, Wsusp, Wact et Wacc
10-1 100 101 102
103 104
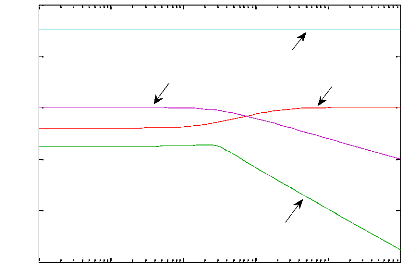
Magnitude (dB)
-100
-150
100
-50
50
0
Wsusp Wact
Wpneu
W acc
Frequence (Hz)

72
Figure 4.4 - Pondérations fréquentielles
appliquées sur les critères de performances

73
Chapitre IV synthèse
4.2.3. Présentation des résultats de
simulation
Les figures 4.5 à 4.8 montrent les réponses
fréquentielles et temporelles des critères de performances.
Nous rappelons que, le test temporel simule le passage sur une
bosse d'amplitude maximale de 5cm.
100 101
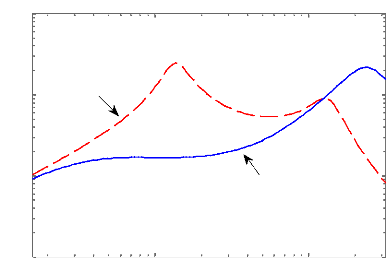
Magnitude (abs)
Diagramme de Bode du trasnfert Yacc(s)/w (s)
102
101
100
10-1
passif
actif
Frequence (Hz)
Figure 4.5 - Réponse fréquentielle du transfert
entre l'accélération verticale de la caisse et le
profil de la
route.

Chapitre IV synthèse
100 101
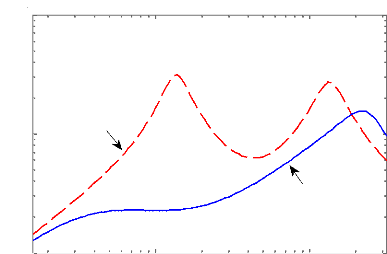
Magnitude (abs)
Diagran-me de Bode du transfert Ypneu(s)/w (s)
10-1
10-2
10-3
passif
actif
Frequence (Hz)
Figure 4.6 - Réponse fréquentielle du transfert
entre l'écrasement du pneu et le profil de la route.
100 101
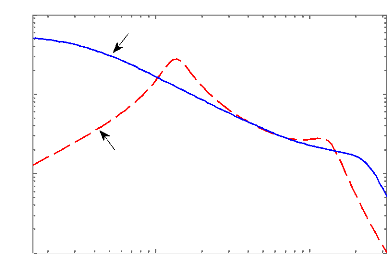
Magnitude (abs)
Diagran-me de Bode du transfert Ysusp(s)/w (s)
100
10-1
10-2
10-3
passif
actif
Frequence (Hz)
Figure 4.7 - Réponse fréquentielle du transfert
entre le débattement de la suspension et le profil de la route.

75
Chapitre IV synthèse
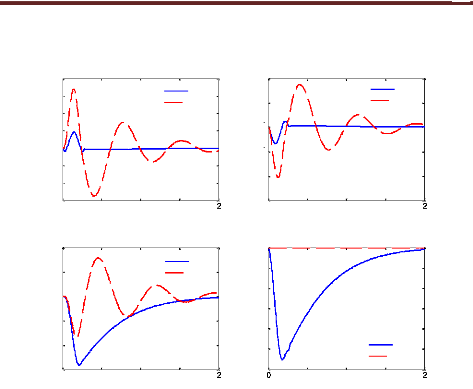
x 10-4 Ecrasement du Pneu
AccOlOration Verticale de Caisse
0
-20
Amplitude (N)
-40
-60
-80
-100
-120
temps (s)
x 10-3 DObattement de Suspension
0 0.5 1 1.5
4
riccati
passif
2
Amplitude (m)
0
-2
-4
-6
temps (s)
temps (s)
Force de Contrôle
0.5 1 1.5
temps (s)
riccati
passif
riccati
passif
0 0.5 1 1.5
4
2
Amplitude (m)
0
-2
-4
-6
0 0.5 1 1.5
0.4
riccati
passif
0.3
0.2
Amplitude (m/s2)
0.1
0
-0.1
-0.2
-0.3
Figure 4.8 - Réponses temporelles
Les réponses fréquentielles et temporelles du
contrôle par Riccati, nous montre clairement
une nette amélioration des performances de la suspension
active comparativement au cas passif (sans contrôle).
En effet, les deux modes de résonance principaux,
autour de 1Hz et autour de 10 Hz respectivement de la masse suspendue et de la
masse non suspendue sont complètement ou pratiquement
éliminés pour les trois critères. Ceci montre que la loi
de commande élaborée assure de bonnes performances en termes
d'isolation vibratoire vis-à-vis des perturbations (un bon confort pour
les passagers) et de maintien du niveau d'adhérence au sol suffisamment
important (une bonne tenue de route). Cependant, ces améliorations sont
amenées au détriment du débattement de suspension en
basses fréquences.

Chapitre IV synthèse
4.3. Résultats pour le contrôle actif du
quart de véhicule à deux degrés de
liberté
Afin d'apprécier l'amélioration apportée
par les lois de commandes appliquées au système de la suspension
active du modèle quart de véhicule. On compare ces
dernières avec le cas passif (qu'on appelle aussi boucle ouverte).
Les figures 4.9 à 4.15 montrent le résultat des
réponses en fréquence et le résultat des réponses
temporelles obtenues pour la suspension passive et les différentes
stratégies de contrôle.
Diagrarrire de Bode du transfert Yacc(s)/w (s)
passif LQG
LQG/LTR
LQR
Hinfini
102
10-1
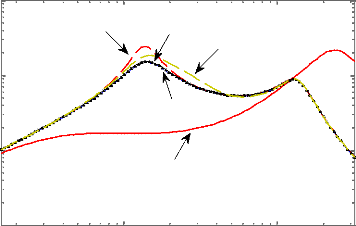
100 101
101
Magnitude (abs)
100
Frequence (Hz)
Figure 4.9 - Réponse fréquentielle du transfert
entre l'accélération verticale de la caisse et le
profil de la
route.

77
Chapitre IV synthèse
Diagramme de Bode du transfert Ypneu(s)/w (s)
passif
LQG
LQG/LTR
LQR
Hinfini
10-3
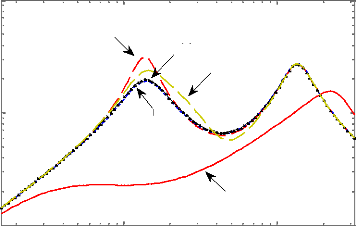
100 101
Frequence (Hz)
Figure 4.10 - Réponse fréquentielle du transfert
entre l'écrasement du pneu et le profil de la route.
100 101
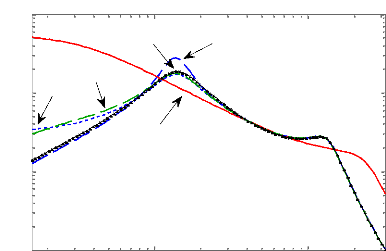
Magnitude (abs)
Diagramme de Bode du transfert Ysusp(s)/w (s)
100
10-1
10-2
10-3
LQR
LQG
LQG/LTR passif
Hinfini
Frequence (Hz)
Figure 4.11 - Réponse fréquentielle du transfert
entre le débattement de la suspension et le profil
de la route.

Chapitre IV synthèse
Accélération Verticale de la Caisse
Amplitude (m/s2)
-0.1
-0.2
-0.3
0.4
0.3
0.2
0.1
0
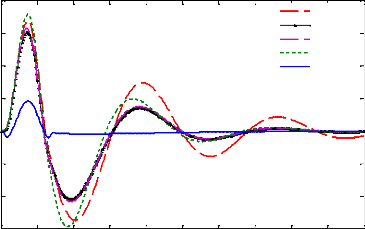
passif LQR
LQG LQG/LTR Hinfini
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
temps (s)
Figure 4.12 - L'accélération verticale de la
caisse obtenus pour les différentes lois de
commande.
x 10-4 Ecrasement du pneu
Amplitude (m)
-1
-2
-3
-4
-5
4
5
3
2
0
1
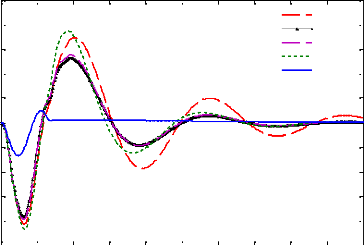
passif LQR
LQG LQG/LTR Hinfini
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
temps (s)
Figure 4.13 - L'écrasement du pneu obtenus pour les
différentes lois de commande

79
Chapitre IV synthèse
x 10-3 Débattement de suspension
Amplitude (m)
-1
-2
-3
-4
-5
-6
4
3
2
0
1
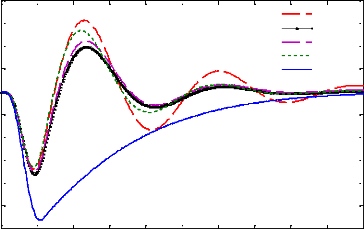
passif LQR
LQG LQG/LTR Hinfini
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
temps (s)
Figure 4.14 - Débattement de la suspension obtenus pour
les différentes lois de commande
Force de contrOle
Amplitude (N)
-100
-120
-20
-40
-60
-80
20
0
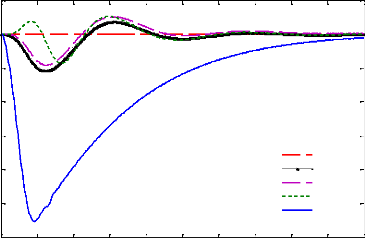
passif LQR
LQG LQG/LTR Hinfini
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
temps (s)
Figure 4.15 - Force de contrôle obtenu pour les
différentes lois de commande

Chapitre IV synthèse
Le tableau suivant donne la valeur de l'indice de performance J
:
|
Contrôle
|
Critère J
|
|
Passif
|
0.0362
|
|
LQR
|
0.0263
|
|
LQG
|
0.0268
|
|
LQG/LTR
|
0.0319
|
|
0.2771
|
Tableau 4.2 - Performance des différents contrôleurs
pour le modèle à 2DDL
Le contrôle par (LQR, LQG, LQG/LTR) permet
effectivement de minimiser le critère J, ce qui améliore
sensiblement la performance de la suspension. Le contrôle par offre un
indice de performance J le plus élevé. Par contre, la
réponse est beaucoup mieux modelée en fréquence, surtout
pour l'accélération verticale de la caisse et l'écrasement
du pneu. Cette observation nous permet de noter que la distribution en
fréquence de la réponse est importante dans l'évaluation
de la performance d'une suspension.

81
Chapitre IV synthèse
4.4. Conclusion
Dans ce chapitre, la synthèse d'une loi de commande pour
la suspension active du modèle
quart de véhicule a été
présentée. Dans un premier temps nous avons mené une
étude bibliographique sur la synthèse , Puis nous avons
détaillé les pondérations choisies de façon
à améliorer les fonctions de transfert dans les domaines de
fréquence intéressants. Nous pourrons dire, d'après ce qui
a précédé que les objectifs sont pleinement atteints avec
le contrôle .
Conclusion Generale
Conclusion générale
Dans cette approche, nous pouvons conclure que les commandes
linéaires LQR et LQG permettent de réduire efficacement le pic de
résonance de la masse suspendue, sans détériorer le
filtrage en hautes fréquences, seulement que, cette dernière est
fort peu robuste. La commande LTR quant à elle permet effectivement
d'améliorer les marges de stabilité. L'atténuation de la
résonance de la masse suspendue est moins importante mais le
débattement de la suspension est plus raisonnable en basses
fréquences. Cependant, le filtrage est tout de même
détérioré dans les moyennes fréquences.

La commande 8 est, elle, reconnue dans le domaine de
l'Automatique pour son potentiel à prendre en compte les
spécifications de performances dans le domaine fréquentiel, et la
robustesse de la loi de commande. Pour les trois critères, les deux
modes de résonances principaux sont pratiquement éliminés,
ce qui est un avantage non négligeable. Mais, ces améliorations
sont amenées au détriment de la suspension en basses
fréquences. Le contrôle

8 offre des résultats bien plus
supérieurs aux autres contrôleurs, mais son ordre
élevé est une source de problèmes potentiels. Les
résultats obtenus démontrent l'importance de la
pondération en fréquence des critères de performances.
Plusieurs compromis sont possibles entre les critères. Les
commandes sont donc aussi jugées sur leur capacité à
gérer ces compromis.
Comme pour toute optimisation multivariable, les poids et les
filtres utilisés ont une grande influence sur la réponse du
système. Plusieurs autres contrôleurs réalistes peuvent
être aussi conçus en modifiant les poids et les filtres
utilisés.

81
Références bibliographiques
[1] PHILIPPE DE LARMINA, Analyse des
Systèmes Linéaires, Edition Lavoisier, 2002.
[2] PIERRE-JEAN BARRE, JEAN- PIERRE CARON, JEAN-PAUL
HAUTIER, MARC LEGRAND, Systèmes Automatiques, Edition
Ellipse, 1995.
[3] DANIEL ALAZAR, CHRISTELLE CUMER, PIERRE APKARIAN,
MICHEL GAUVRIT, GILLES FERRERES, robustesse et commande optimale,
Edition Cépaduèse ,1999.
[4] Gilles Duc, Stéphane Font,
commande et -analyse, Edition HERMES, Paris, 1999.
[5] N'OUALI, L, MEZAR, S, commande
linéaire quadratique gaussienne de la suspension active d'un
véhicule, présentée en vue de l'obtention du titre
d'ingénieur en automatique, soutenue en 2006.
[6] Damien SAMMIER, sur la
modélisation et la commande de suspension de véhicules
automobiles, présentée en vue de l'obtention du grade de
docteur de L'INPG spécialité : Automatique- Productique, soutenue
le 9 novembre 2001.
[7] STEPHANIE HARARI, contrôle
modale semi-actif et actif à faible consommation
énergétique par composants piézoélectriques,
présentée en vue de l'obtention du grade de docteur
spécialité : Génie Mécanique, soutenue le 12
octobre 2009 ;
[8] HADDAD Madjid, contrôle actif
robuste d'une structure mécanique flexible, présentée
en vue de l'obtention du diplôme de magister en génie
mécanique, soutenue le 12 octobre 2009.
[9] GHERBI Sofiane, la commande robuste
(technique -analyse et -synthèse), présentée en vue
d'obtention du diplôme de doctorat, option : Automatique, soutenue
2009.
[10] Alessandro ZIN, sur la commande
robuste de suspension automobile en vue du contrôle global de
châssis, présentée en vue d'obtention du grade de docteur
de L'INPG, soutenue le 3 novembre 2005.
[11] Othman Ben Mekki, Amortissement
semi-actif des structures flexibles, présentée en vue
d'obtention du diplôme de docteur de l'école nationale des ponts
et chaussées, soutenue en mai 2006.
[12] Emmanuel Marie ARNOUX, lois des
commandes et systèmes de suspension adaptatifs théorie et
application à la mécanique automobile,
présentée en vue d'obtention du titre de docteur de
l'école centrale de Lyon, soutenue le 11 avril 2003.
[13] A.MAIDI, Cours de la théorie de
l'optimisation et de la commande optimale, Département Automatique.
2009-2010.
[14] S.DJENNOUNE, cours d'analyse des
systèmes multivariables, Département Automatique
2007-2008.
[15] Ales Kruczek, Anonin Stribrsky,
control of automotive active suspension with linear
motor, CTU,
Faculty of Electrical Engineering Department of Control Engineering
Karlovo namesti 13, 121 35 Praha 2.
[16] Yahaya Md. Sam, Mohd. Ruddin Hj. AB.Ghani,
Nasarudin Ahmad, LQR Controller for Active Car Suspension,
Control and Instrumentation Eng. Dept. Faculty of Electrical Engineering
University Technology Malaysia.
| 

