Chapitre 2 : Essais expérimentaux et validation
du modèle - Mémoire CNAM Patrick BOIDIN.
.
Aimants P.
Marche/Arrêt
J r = 1 0244 10 2
. _ kg m 2
, .
Trma
Tu Pu
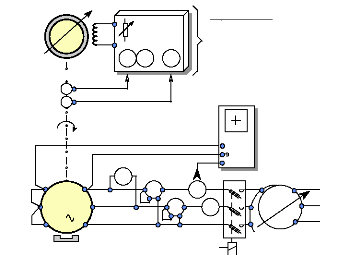
Dispositif de Frein :
Capacité de réglage du couple résistant de
0 à 135 N.m
Couple résistant à peu prés constant par
rapport à la vitesse de rotation
n
Frein
ea
Poudre
T
n
n = 46,8 tr/ min
v a ( t)
i a ( t)
1'
1
U
20A
W
I
220V-3ph
Réseau
N
2'
MS
3
2
W
I
3'
3
Régulateur d'induction
Fig. II-3.1 : Schéma de montage des essais en
charge.
D'après les résultats obtenus et
présentés en annexe 1, on fait les remarques suivantes:
· Quelle que soit le couple résistant,
appliqué à l'arbre, le moteur a pu démarrer directement
sur la fréquence du réseau. Il suffit d'appliquer une tension
suffisante aux bornes du moteur.
Une charge équivalente à un couple
résistant constant de 138 N.m n'a pas empêché de
démarrer le moteur. Il faut noter que le moment d'inertie des masses
tournantes de la charge (frein à poudre) est relativement faible et
s'oppose peu à la variation de la vitesse.
1ère constatation:
? Les conditions de démarrage du moteur Fintronic
en boucle ouverte dépendent essentiellement du moment d'inertie des
masses tournantes et dépend beaucoup moins du couple
résistant.
· Le courant nominal de 9,3A limite le couple utile
à environ 100 N.m pour une fréquence d'alimentation de 50 Hz.
=
1. Pour un fonctionnement en service continu, il n'est
pas possible d'obtenir un couple utile supérieur à 100N.m sans
échauffements excessifs.
2. Pour un fonctionnement en service intermittent,
il est possible d'atteindre des couples utiles très élevés
(environ 180 N.m). Il faut cependant accepter un dépassement du courant
nominal.
2ème constatation :
? On tend à proposer ce type de moteur pour des
applications nécessitant des couples élevés durant des
cycles intermittents.
Dans ce cas de fonctionnement, il est important de
connaître les contraintes thermiques du moteur, compte tenu des courants
imposés. On pourrait prévoir une commande tenant compte à
chaque instant, de l'état thermique du moteur.
· Le courant à vide du moteur augmente
très vite avec la tension. Pour une tension de 300 volts, les courants
correspondent aux courants nominaux. Ce sont les pertes magnétiques qui
contribuent à absorber de tels courants.
3ème constatation :
? Pour une charge donnée, iI est essentiel de
limiter les pertes magnétiques dans les tôles du moteur. Il faut
réduire au mieux les tensions aux bornes du moteur. On applique des
tensions justes suffisantes pour maintenir le couple
électromagnétique maximale correspondant au couple
résistant.
· Les courants absorbés dans les phases du moteur
sont très inductifs. Par conséquent, le vecteur
représentatif de la f.e.m induite au stator tend à se retrouver
en avance sur le vecteur courant [9]. Dans le cas d'une
commande par onduleur « commutateur de courant », la position de la
f.e.m ne favorise pas l'annulation et l'inversion des courants (cas où
l'inductance synchrone est en court-circuit sur sa f.e.m). L'amplitude et le
signe de cette f.e.m ne sont pas aptes à s'opposer efficacement à
ce courant. Il faut insérer, dans le circuit, des condensateurs qui
permettent de transférer l'énergie stockée dans les
inductances vers les condensateurs.
4ème constatation :
? L'utilisation d'un onduleur de tension est moins
coûteuse et plus appropriée. Il n'est pas nécessaire
d'équiper le système d'un dispositif particulier de commutation
forcée puisque l'énergie stockée dans l'inductance est
dissipée au moyen des diodes de roue libre.
· Le flux créé par les aimants est faible
devant le flux nécessaire dans l'entrefer. On doit donc renforcer ce
flux par une réaction d'induit. C'est pourquoi, les courants statoriques
sont très inductifs. Par conséquent, il serait utopique de
vouloir améliorer le facteur de puissance sans réduire
sensiblement les performances du moteur en couple. Le rendement du moteur se
trouve pénalisé et les meilleurs résultats obtenus pour ce
rendement ont été de 40%. Toutefois, cette valeur ne peut pas
être considérée comme mauvaise compte tenu des conditions
de fonctionnement. En effet, pour des fréquences de rotation aussi
faibles, des couples aussi importants et des encombrements aussi faible, les
solutions utilisants le moteur asynchrone ne donnerait pas d'aussi bons
résultats, même muni d'une commande vectorielle de flux. Une
étude comparative serait intéressante à faire.
5ème constatation :
? Pour ce type de machine, il vaut mieux favoriser le
contrôle du couple instantanéau détriment du facteur de
puissance.
· Au démarrage, les courants de pointe,
absorbés par le moteur n'ont jamais dépassé plus de 2,3
fois le courant nominal. Dans la majorité des cas, ces courants sont
restés voisins du courant nominal.
· A l'arrêt, le flux constant créé
par les aimants tend à vouloir figer le rotor par rapport au
stator. On est en présence d'un couple"résiduel" qu'il
ne faut pas oublier de rajouter au couple résistant. Ce couple, obtenue
par un essai (bras de levier et poids),
prend une valeur approximative de 3N.m. Ce couple est constant
par rapport à la vitesse.
3.2. Résultats obtenus pour U ab = 340 volts et T
u = 138 ,5 N . m :
Ce relevé particulier va permettre, par la suite, de
vérifier la validité du modèle mathématique du
moteur. Avant cela, nous présentons les résultats
expérimentaux obtenus par ce relevé :
Mesures
|
Tu
|
Pu
|
Ias
|
Ibs
|
Pabs
|
Qabs
|
Vas
|
|
(N.m)
|
(kW)
|
(A)
|
(A)
|
(W)
|
(var)
|
(V)
|
138,5
0,64
11,3
11,3
1 995
6 365
196,2
n = 46 , 8 tr/ min. => 50Hz. Pmag =
717 W.
Calculs
|
(1)
cosg
( ( ' )
|
(2)
PJ
3 2
R s I bs
(W)
|
S
|
Pu
T u ( 2i n )
(W)
|
?
P u P abs
(%)
|
Pmag Pabs
(%)
|
|
2 2
+
P abs Q abs
(VA)
|
|
0,299
72,6
|
434
|
4 969
|
639
|
34,0
|
36,0
|
(1) : cos q = cos[ Arc tan( Q abs Pabs)].
(2) : A chaud, Rs = 1 ,1 3 ?.
4. SIMULATIONS EN BOUCLE OUVERTE ET VALIDATION DU
MODELE.
Toutes les simulations, précisées dans ce
paragraphe, sont réalisées numériquement avec le module
« SIMULINK » du logiciel « MATLAB SOUS WINDOWS » version
4.2c.1 d'Octobre 1994 (MathWorks). Ce logiciel est un outil informatique qui
permet de réaliser des simulations pour des systèmes
définis sous la forme d'équations
algébrodifférentielles. La méthode de résolution
numérique retenue pour notre application est celle de Runge et Kutta
d'ordre 5 et d'Euler.
4.1. Modèle mathématique du moteur et
valeur numérique des paramètres :
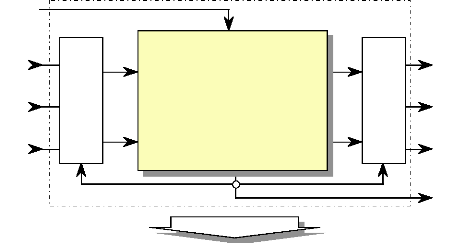
vas
vcs
vbs
Trma
Matrice
de
Park
[P]
vqs
vds
Modéle mathématique
du moteur
FINTRONIC
dans
Park
Avec
sa machine iqs
ids
Matrice
inverse
de
Park
[ P] --1
ias
ibs
ics
0
Fig. II-4.1.
d i ds ( t)
v ds ( t ) = R s i ds (
t ) + Ld
? ? ( )
t L i t
( )
d qs
dt
v t R i t L qs ( ) ? ?
s qs ( ) d
dt +w ( t)
(L d i ds ( 0+
taim)
di qs ( t)
3
T t K i t
( ) avec ?
K ? N
em T qs ( ) ?
? T p daim
2
T em ( t ) -- T r (t
avec T t T t f t T
? ?
r ( ) rma ( ) ( )
? ? r 0
dt
) - )
? ?
J J
?
m r
N
p
d o) (t
(II-15)

di ds (t
) R v t
ds ( )
? ? L i t
s ( ) ( ) ( )
? ? t i t ?
ds qs
dt L
d d
di t
qs (
dt
)
) R v ( t ) ? ? daim

? ? L i t
s ds
? ? t i t ? ? ? t
qs ( ) ( ) ( ) (
ds L L

d d
d
d o) ( t) Np
dt J m + Jr
T em ( t ) = K T i qs
0 )
[T em ( 0-- T rma ( t ) -- f o) ( t
) -- Tr0]
(II-16)
Pour effectuer les différentes
simulations, on définit les paramètres
Jr et Trma ( t) ainsi
que les valeurs initiales i ds0 ,
iqs0 , (1) 0 et 90 :
· En charge, on prend un moment d'inertie de la machine,
équivalent à celui du frein à poudre :
1,0244.10-2 kg.m2 . Cette valeur
correspond à une roue pleine en acier, de diamètre 0,1 m et
d'épaisseur 0,06m.
|
J
|
|
an R 4L
|
avec acier = 8 930 kg / m3.
|
ü --
|
2
|
(II-17)
· Le couple résistant
Trma, dû à la machine
entraînée, est supposé proportionnel au carré de la
fréquence de rotation avec une condition à vitesse nulle, non
nulle : Trma (t ) = k o)2 (t) + T
(II-18)
· Les valeurs initiales de i ds , i
qs ,00 et co0 sont supposées nulles.
· Les phases du moteur seront soumises à un
système triphasé de tensions de la forme :

v as = Vs 2 coscost

v bs = Vs 2 cos(cost

v cs = Vs 2 cos(cost
(II-19)
En réunissant toutes les valeurs numériques, on
obtient :

R =1 , 13n / L d = 53 , 7 mH / ''daim = 141 mW /
Np = 64
K T = 13 , 5 N . m / A / J m = 0 , 141 kg . m
2 / T r0 = 3 N .m
f = 0 , 0306 N . m / rad-1 (é
lec) / i ? ?
i ? ?
? ? 0
ds 0 qs 0 0 0
|
En charge:
|
T t k t T J
2 ? 2
? ? ? ? 1 0244 10 kg m
.
rm a ( ) ( ) / , .
r
|
2
|
(II-20)
| 

