CHAPITRE 2
ESSAIS EXPERIMENTAUX
ET
VALIDATION DU
MODELE
1. INTRODUCTION.
Dans cette partie d'étude, nous avons tout d'abord
déterminé par des essais expérimentaux, l'ensemble des
valeurs numériques définissant les éléments du
modèle. C'est à dire :
· La résistance de l'enroulement des phases du
stator : Rs .
· L'inductance synchrone du moteur :
Ls qui correspond aussi à l'inductance
synchrone d'axe d du référentiel de Park
Ld. Avec les 2 paramètres
précédents, on en déduit la constante électrique
statorique du moteur : ts.
· La f.e.m à vide, induite dans les phases du
stator et provoquée par la variation du flux créée par les
aimants du rotor : e 0 s . On en déduit le flux
maximal, produit par les
aimants : ??aim et la constante de couple du
moteur : KT.
· Le coefficient de frottement visqueux du moteur :
f .
· Le moment d'inertie des masses tournantes du moteur
(rotor) : Jm et d'en déduire la constante
mécanique du moteur, à vide : ' m0.
· La constante thermique d'échauffement du moteur,
compte tenu que le moteur est démuni de tout système de
refroidissement : tth.
· La température limite d'échauffement des
enroulements de phases : 0lim.
Ensuite et pour compléter les résultats obtenus,
nous avons émis une série de remarques sur le comportement du
prototype, face aux différents essais.
Pour finir ce chapitre et valider le modèle
mathématique du moteur, nous avons comparé les résultats
obtenus par des simulations, sous MATLAB-SIMULINK, avec les résultats
des essais.
2. DETERMINATION NUMERIQUE DES ELEMENTS DU MODELE. 2.1.
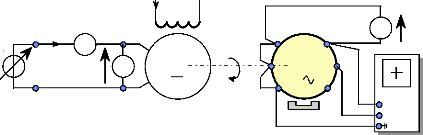
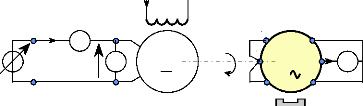
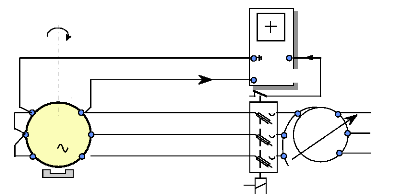
Essai à vide du moteur en fonctionnement générateur
:
Cet essai permet de construire la caractéristique de
la f.e.m en fonction de la fréquence de rotation (Annexe 1) et d'en
déduire la valeur du flux dans l'entrefer, produit par les aimants. Pour
effectuer cet essai, nous entraînons le moteur FINTRONIC avec un moteur
à courant continu à excitation séparée.
Ea 0s
V
1
I
1'
n
+
A
U
2'
V
2
M
GS
J= 0,8A
3
Chronomètre
3'
et
Tachymètre
3
Aimants P.
e a 0 s (t )
e b 0 s (t )
Fig. II-2.1 : Schéma de montage de l'essai à
vide en générateur.

Les résultats et les remarques sur cet essai, sont les
suivants :
· Sur une moyenne de 10 relevés, on obtient une
constante de vitesse de 0,67volts efficace par tour par minute. Soit :
?
|
0 ,6 7 volts / tr . min -1 = E a 0s = 40 ,2
volts pour n = 60 tr / min
|
(II-1)
· Pour un fonctionnement à vide, on a :

v as = e a 0 s ?Vs = E0 s =0) aim
co = 27c N p n
avec N p : Nombre de pas du moteur (64 dans
notre cas).
On en déduit la valeur maximale du flux produit par les
aimants et la valeur de la

constante de couple sachant que KT = 3 2
NpTdaim :
·?aim = 141 mWb soit
Taim = 99 ,7 mWb
KT = 13 ,5 N . m /
A
(II-2)
· Les ondes de tensions, obtenues sur les oscillogrammes,
sont quasiment sinusoïdales. Echelles : 20 volts/cm et 2ms/cm :
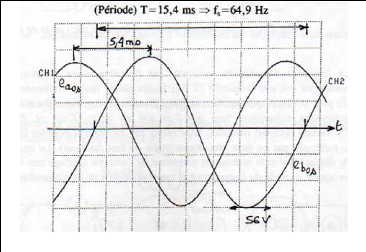
Fig. II-2.2 : Ondes de tensions. e a 0 s ( t ),
e b 0 s ( t) et e c 0s ( t) à n =61 tr/min
· Au moment de cet essai, on remarque que la
fréquence de rotation du moteur varie sensiblement et de façon
périodique. Cet effet néfaste (parasite) impose à la
machine des vibrations et des à-coups de couple qui nuisent au bon
fonctionnement du moteur. Ce phénomène se produit quelle que soit
la fréquence de rotation du moteur. A l'oscilloscope, on observe cet
effet parasite par l'intermédiaire de l'onde de tension induite au
stator.

La machine tourne à 14 tr/min (15Hz) soit à peu
prés au quart de sa vitesse nominale. La base de temps est de 0,5s par
cm.
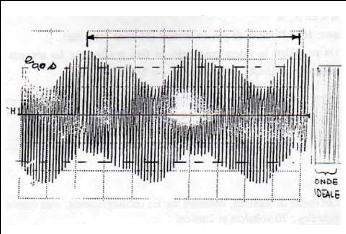
1 tour mécanique
Fig. II-2.3 : Oscillations parasites détectées
sur l'onde de fe.m.
La fréquence d'oscillation, constatée sur
l'oscillogramme, équivaut au demi-tour mécanique soit une
fréquence 32 fois moins élevée que la fréquence
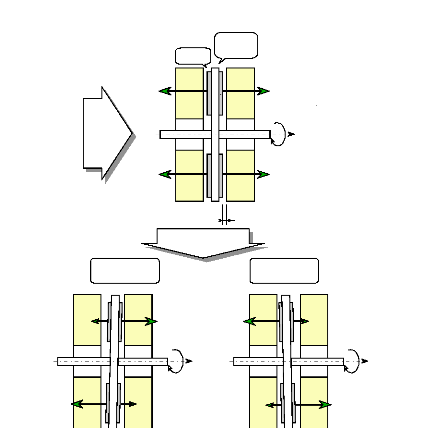
électrique (2,2 Hz pour 69,3 Hz). Contrairement aux apparences, ce
phénomène n'est pas dû à des frottements
mécaniques bien que l'on soit en limite. Ceci est dû à des
forces d'attraction (axiales) parasites, provoquées par les aimants dont
les lignes de champs se referment par les plots statoriques (règle du
flux maximal). Le manque de rigidité du disque rotor et le manque de
constance de l'entrefer (réglage très difficile à mettre
en oeuvre = voile du disque) sont la cause principale de ce
phénomène.
Chapitre 2 : Essais expérimentaux et
validation du modèle - Mémoire CNAM Patrick
BOIDIN.
.
Stator
N°1
Stator
N°2
Les forces
d'attraction ne
sont
plus
équilibrées
Disque
rotor
Aimants
N
S
Stator
N°1
Stator
N°2
Entrefer
constant
Axe de rotation
S
N
Entrefer mécanique
Entrefer non constant
Position du rotor
0 = 00
Position du rotor
0 = 1 80?
Les forces
d'attraction s'équilibrent
Stator
N°1
Stator
N°2
Fig. II-2.4 : Explication du phénomène
d'oscillations sur la fréquence de rotation.
2.2. Essai avec les enroulements statoriques en
court-circuit :
Cet essai permet de déterminer la valeur de l'inductance
synchrone du moteur et d'en déduire la constante de temps
électrique.
J= 0,8A
V
M
Chronomètre
et
Tachymètre
n
I
+
A
U
1'
1
2'
GS
3
Icc
2
A
3
3'
Aimants P.
Fig. II-2.5 : Schéma de montage de l'essai en
cc.
· Des mesures sur la résistance des phases
statoriques, par la méthode voltampèremétrique, nous donne
les résultats suivants :
R s = 961 m ? à
20°C et 1,13Q à 80°C.
· En convention générateur, on a : V
E R I j L I
= -- -- co
s s
-- s -- s -- s -- s
(II-3)
? 2
0 ( ) ( )
2 2
E R I j L I ? ?
= -- -- co ? E R I
? ? L I
?
s s s s cc s c c
? ? ?
s cc cc

2
E ? 2 ? ( )
?
R I
L s ?
s s cc
?
Co I cc
(II-4)
soit dans la construction de Fresnel :
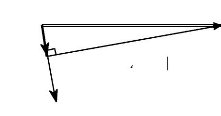
--)
s 0) I cc
90?
--)
Es
0
Fig.II-2.6
--)
R s I cc
--)
Icc
Sachant que w = 2 i N p n , on a
l'expression de l'inductance synchrone en fonction de la fréquence de
rotation (tr/s) :
L s
?
2 ?
1
N n I
p
.
2
E --
s
( )
R I
s cc
cc
2
(II-5)
· Par l'essai à vide, on a obtenu E a 0 s
= 40 , 2 volts pour n = 1 tr / s. Quelque soit la
fréquence de rotation du moteur, l'essai en court-circuit nous donne :
I cc = 1 ,8 6 A. D'où,
L'inductance synchrone correspond à :L s = 53
,7 mH
(II-6)
L s
? La constante de temps électrique du moteur
'rs = est de 47,5 ms. Cette valeur
est
R s
importante, comparée à celle obtenue pour un
moteur classique de même puissance qui est de quelques ms seulement.
2.3. Essai à vide du moteur FINTRONIC en
fonctionnement moteur :
Cet essai permet de déterminer les pertes
mécaniques et d'en déduire le coefficient de frottement visqueux
du moteur. Tous les essais sont réalisés sous une alimentation de
tension à 50 Hz pour une fréquence nominale de 64 Hz.
Aimants P.
Marche/Arrêt
n = 46,8 tr / min
v a 0 s (t ) i a 0 s (t )
1'
1
U
W
I
20A
220V-3ph
Réseau
N
2'
MS
3
2
W
I
3'
3
Régulateur d'induction
Fig.II-2.7 : Schéma de montage de l'essai et vide en
moteur.
· En prolongeant la courbe de la caractéristique
U 2 i--> Pmag + Pmé ca,
au point
d'abscisse égal à zéro (Annexe 1), on
obtient les pertes mécaniques. Elles sont supposées constantes
par rapport à la tension et sont proportionnelles au carré de la
vitesse mécanique. On en déduit le coefficient de frottement
viqueux f :
Pm
f -- LIé 2ca et
Pmé ca = Tfr n ? f = 1 ,96 N . m / rad .
s-1(méca)
Coefficient de frottement visqueux.
mé ca
ou f -- ?
2 et Pmé ca = Tfr ( 27c
n) = f = 0 , 205 N. m / tr. min -1
P
(2 7c n)
2 et Pmé ca = Tfr (0)
Np) = f = 0 ,0306 N. m / rad .
s-1(élec)
mé ca
ou f --
P
(o) Np)
(II-7)
· Pour effectuer cet essai, on couple la machine sur le
réseau par la méthode habituelle : Moteur à courant
continu et lampes de mise en phases sur le réseau. Le moteur à
courant continu entraîne la machine à 47 tr/min. Ensuite, elle est
couplée au réseau, par l'intermédiaire d'un
régulateur d'induction réglé à l'avance à
une tension composée de 115 volts. En fonctionnement
générateur, la machine fournit entre les 2 bornes de son stator,
une tension composée de 55 volts.
? La machine se couple au réseau sans problème
et fonctionne en moteur.
Dans un deuxième temps, on tente de démarrer le
moteur en forçant sa rotation à la main.
? Le moteur s'accroche au réseau sans et-coups, ni
problème. La fréquence de synchronisme du moteur est très
facilement atteinte et la main.
Pour finir, nous tentons de demarrer le moteur sous 115V en
direct et sans aucune aide exterieure. L'essai est concluant et le moteur
démarre à chacune de nos tentatives. Il en est de même
pour tous les essais effectues.
? Le moteur est apte à démarrer en direct sur
le réseau.
· La tension limite de decrochage du moteur, à vide,
se situe à environ 110 volts soit une tension de phase de 63,5 volts.
· Le moteur vibre sensiblement pour des tensions elevees,
voisines de la tension nominale.
· On suppose que les pertes magnetiques sont
proportionnelles au carre de la tension (droite ideale sur la caracteristique
en annexe). On en deduit le coefficient de proportionnalite :U
ab = 67 , 6 . 103 --> Pmag =
419 W = k=6,20.10 -3 W/volts2.
De 0 à 283 volts, on peut effectivement considerer
cette proportionnalite comme
realiste. Au-delà, il faut reconsiderer
cette hypothèse, il suffit de comparer les
courbes de la
caracteristique U 2 i--> Pmag
+ Pmé ca, en annexe 1, pour s'en convaincre.
· Le couple de frottement visqueux correspond à :
Tfr = 9 ,5 7 N . m
2.4. Essai de
ralentissement du moteur fonctionnant à vide :
Connaissant le coefficient de frottement visqueux
f, cet essai permet de determiner le moment d'inertie des
masses tournantes du moteur, à vide.
220V-3ph
Réseau
2
2'
N
3
3'
Aimants P.
Marche/Arrêt
n(t0 ) = 48tr/min
n(t1 ) =0tr/min
MS
3
Synch
e a 0 s (t 0 à
t1)
1'
1
20A
Régulateur d'induction
Fig. II-2.8 : Schéma de montage de l'essai de
ralentissement du moteur.
· e a 0 s ( t) dans l'intervalle de temps
compris entre t0 (correspondant à n = 48 tr /
min) et t1 à n = 0 tr / min
:
Echelle : 20ms/cm
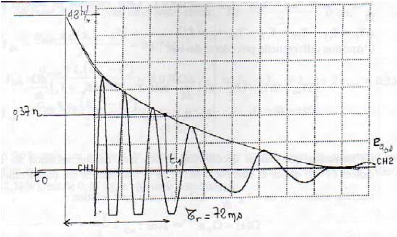
Fig. II-2.9 : Relevé de l'oscillogramme
e a 0 s (t ).
· Le niveau de tension aux basses vitesses, fourni par
la dynamo-tachymétrique, est trop faible pour obtenir des mesures
significatives. De plus, les à-coups de couple ont tendance à
transformer le signal continu du capteur, en un signal modulé
inexploitable. Or, pour réaliser cet essai, on décide d'observer
l'évolution de la f.e.m aux bornes d'une phase du moteur dans son
fonctionnement générateur et en phase de
décélération.
· En régime dynamique, le système
mécanique, constitué par un moteur accouplé en direct sur
une machine, est régi par l'équation différentielle
suivante :
d ?
dt
T T ( J J )
em ? r m + r
(II-8)
Nota : Généralement, le premier terme de
l'expression est non linéaire.
Pour supprimer la non-linéarité du premier
terme, on linéarise le système autour d'un
point
fonctionnement sur la vitesse : ?0 . Pour cela, on
découpe la période de
décélération en intervalles de temps
A t donnés. On obtient ainsi [8] :
· A t0=0, la condition initiale de l'essai
?0
? 1
·

A t 1 = A t , T _ T ( J J ) t
= +
em 0 r 0 m r A
Q 2
·

A t 2 = t 1 + A t , T _ T ( J J )
t
= +
em 1 r 1 m r ?
· A t 3 = t 2 + At ...
Dans de nombreux cas, la variation du couple moteur est
supposée constante autour de son point de fonctionnement et la variation
du couple résistant, proportionnelle à la vitesse. D'où
:
ATem = Tem 1 -- Tem 0 = Tem 2 --
Tem1 =... = cte=T. Cette variation ne dépend pas de
n. ATr = Tr 1 -- Tr 0 = Tr 2 --
Tr1 =...= fn
L'équation différentielle précédente
devient :
AT em -- AT r =
|
? ? ??
J J
? soit T f
? ? m ? r
? ? ?
J J
m r
At
|
di2
dt
|
|
|
|
|
n(t = 0 ) = n 0
(II-9)
En supposant que chaque décélération a
lieu sans aucune variation du couple moteur
(T=0) et que le moment d'inertie
de la machine est nul (décélération sans machine
entrainée), on a J
|
m
|
di2
dt
|
+ fn = 0, qui a pour solution :
|
|
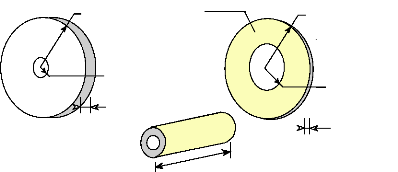
Taux d'occupation des aimants
tocc = 76%
R=155 mm
aacier = 7850 kg / m3
(Densité)
r=30 mm
Ra=149 mm
caim = 8300 kg / m3
(Densité Récoma 28)
+ 2 x
ra=122 mm
e=10,5 mm
R=80 mm r=30 mm
+
Acier
L=141 mm
ea=1,75 mm
Jm
? ? t ? ? ? e ? t mo
? avec ?m 0 ? .
0
f(II-10)
On en déduit ainsi :
n(t = T m 0 ) = 0 ,3 7 n0
(II-11)
L'essai nous donne t m 0 = 72 ms. Or, sachant
que f=1,96 N.m/rad.s-1, on obtient:
J m = f T = 0 ,14 1 kg
.m2 : Moment d'inertie des masses tournantes du
moteur
FINTRONIC.
(II-12)
· Vérification du résultat
précédent par un calcul approximatif :
On sait que le rotor est constitué d'un disque
métallique muni d'un arbre creux et de 2 couronnes d'aimants
collées sur les faces du disque.On peut donc calculer le moment
d'inertie de l'ensemble.
Fig.II-2.10 : Les éléments de constitution
du rotor.
Moment d'inertie pour un cylindre creux : J = an
e (R 4 -- r4). D'où,
2
J dis
J aim
J arb
?
aaciern
aim a
? ?
aaciern
e
e R-- r4)
L (R 4 - r4)
2 = 0 ,0746
(R a 4 -- ra4)
2 = 0 ,070
2 ti occ= 0 ,0047
? ?
??
?
?
?
? ?
??
J J J
? ? 2 J ? 0 154
, kg m
.
m isc arb aim
A 10% prés, on retrouve le même résultat.
Par comparaison, le moment d'inertie d'un moteur asynchrone, pouvant fournir un
couple nominal de 95N.m à 750tr/min (7,5kW), est de 0,13
kg.m2 (donnée constructeur).
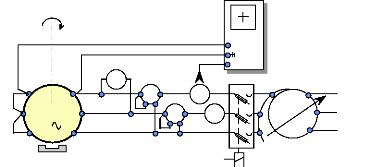
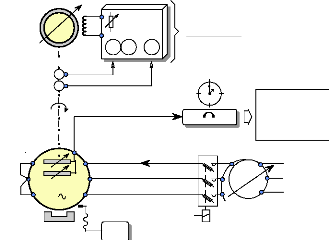
2.5. Essai d'échauffement du moteur FINTRONIC
:
Cet essai permet de déterminer :
· La température limite
elim atteinte par les enroulements statoriques pour
un régime de fonctionnement permanent donné.
· La constante thermique tith.
Chaque enroulement des 12 secteurs est équipé
d'une double sonde de température du
type thermo-résistance au
platine PT100n. On utilise 2 de ces sondes pour effectuer
cet
essai. Une table de conversion conforme à la norme permet
de convertir les valeurs de résistance en valeurs de température
(en degrés Celsius).
n = 46,8 tr / min
N
3'
2'
1'
Aimants P.
Frein
ea
Poudre
MS
3
e
T
n
Résistances variables par
sonde
platine
3
1
Thermomètre
2
oC
Tu Pu n
Trma
I = 9A
Marche/Arrêt
Dispositif de Frein : Réglé à 87
N.m
Ohmmètre
20A
SL
Régulateur d'induction
Table de correspondance
de la norme
DIN 43
760
CPC
220V-3ph
Réseau
Fig.II-2.11
· D'après les relevés effectués
(Annexe 1), on obtient une température limite des enroulements
statoriques de 125°C. La température ambiante
était de 22,2°C au moment de l'essai.
1ère constatation :
En prenant une marge de sécurité d'environ 10%,
les parties isolantes du moteur doivent tenir 140°C, au minimum. Ce qui
correspond d'après la norme NFC à la catégorie F des
matières isolantes (155°C).
Nota :
Il faut préciser que le prototype est démuni de
tout système de refroidissement. En effet, un dispositif
d'auto-ventilation serait inutile compte tenu des faibles vitesses de rotation
du moteur.
L'enveloppe du moteur est constitué d'une
résine de moulage « DAMIVAL 13 576 » dont la plage thermique
d'utilisation est de -70°C à +130°C. La notice technique du
matériau concerné précise une tenue thermique en continu
de 140°C, sans dégradation.
? Le matériau utilisé est limite en tenue
thermique. Il faut réduire les pertes magnétiques afin de limiter
les échauffements. La commande se chargera de réduire ces
pertes.
· La constante thermique d'échauffement est de
22,5min. La température limite du moteur est atteinte après
environ 112 min de fonctionnement (1h52 min).
°lim ? 1 2 5° C et
rth = 22 ,5 min.
|
|
(II-13)
2.6. Paramètres du modèle :
Equations électriques dans le repère (d,q)
de Park :
v R i L
=
ds s ds + d
v R i L
=
qs s qs + q
ds
di
dt

qs
di
dt
avec
e qs = w ( L d i ds +
daim ) e ds ? L q qs
?? et co i
3
L d = L q = L s = l f + 2 s
L m
et
Rs = 1 , 1 3 ?, L d
= L q = L s = 53 ,7 m H
? ? aim ? ? ? aim =
141 mWb
Equation mécanique dans Park :
3
T em = K T i qs avec
K T = N p
2
H
T T N J J
1 (
- =
em r ?? m +
p
T r = T rma + T r 0 + f O)
? e ds
+ e qs
??daim
r)
do) 1 dt I?
Tous les essais effectués permettent de déduire
l'ensemble des paramètres numériques du modèle. On obtient
ainsi :
Constante de couple : KT = 13 ,5 N . m /
A
Nombre de pas du moteur : Np=64
Couple résiduel dû aux aimants : Tr0 = 3 N
. m Moment d'inertie du rotor : J m = 0 ,14 1 kg
.m2
Coefficient de frottement visqueux du moteur :
f =
0 , 0306 N . m / rad . s -1 0 lec)ou f = 0 ,205 N . m /
tr.min-1
|
|
(II-14)
Nota:
· Jr et Trma sont
à définir selon la machine entraînée.
· Le modèle ne tient pas compte :
des pertes magnétiques,
de la saturation du circuit magnétique,
de la variation du flux Taim, due aux
parties saillantes des plots statoriques.
· Attention :
vds et vqs sont en
réalité des valeurs primées.
3. ESSAIS EN CHARGE EN FONCTIONNEMENT
MOTEUR.
Cette série d'essais, effectuée en boucle
ouverte, permet de juger les capacités et les performances du prototype.
Par obligation, on a augmenté l'entrefer de la machine pour
éliminer les contraintes mécaniques et magnétiques
observées au début de nos essais. Cette modification a pour
conséquence de réduire sensiblement les performances de la
machine. Les améliorations mécaniques et magnétiques
nécessaires n'ont pas pu être réalisées dans le
cadre de nos travaux.
On notera clue les performances réelles
sont en réalité bien supérieures à celles
annoncées dans ce mémoire.
Pour réaliser ces essais, on utilise un banc d'essai
dynamométrique. Ce banc est équipé d'un frein à
poudre magnétique (couple résistant constant par rapport à
la vitesse) du type PB115 et de marque « Vibro-meter ».
3.1. Remarques sur les essais en charge :
| 

