Dimmensionnement d'un générateur piézoélectrique appliqué à une voie routièrepar Mike Kapapa Kulaila Université de Lubumbashi - BSC en Electromécanique 2019 |

CHAPITRE 3 ETUDE ET MODELISATION DU SYSTEMECe chapitre aura pour objectif la mise en lumière des paramètres majeurs qui influent sur la performance d'un récupérateur d'énergie vibratoire utilisant la transduction piézoélectrique. Pour cela on établira le modèle général d'un générateur d'énergie vibratoire, duquel on déduira les facteurs favorisant une optimisation de la puissance de sortie. 3.1 Présentation du logiciel utiliséMATLAB (« matrix laboratory ») est un langage de script émulé par un environnement de développement du même nom ; il est utilisé à des fins de calcul numérique. Développé par la société The MathWorks, MATLAB permet de manipuler des matrices, d'afficher des courbes et des données, de mettre en oeuvre des algorithmes, de créer des interfaces utilisateurs, et peut s'interfacer avec d'autres langages comme le C, C++, Java, et Fortran. Les utilisateurs de MATLAB (environ 4 millions en 2019) sont de milieux très différents comme l'ingénierie, les sciences et l'économie dans un contexte aussi bien industriel que pour la recherche. Matlab peut s'utiliser seul ou bien avec des toolboxes (« boîte à outils »). 3.2 Modélisation du module générateurComme vu au CHAPITRE 1 ; le récupérateur d'énergie se modélise par un déplacement relatif d'une masse par rapport à une source de vibration. Ce modèle proposé pour la première fois par (Williams, et al., 1996) est à ce jour le plus utilisé dans ce domaine de recherche. Le modèle est constitué d'une masse sismique m, sur un ressort k. Lorsque générateur vibre, la masse se meut de manière décalée par rapport à la source de vibration. Il existe alors un mouvement relatif entre la masse sismique et la source de vibration ; c'est de ce déplacement que le transducteur génère l'énergie électrique. Ici le transducteur est représenté sous forme d'un amortisseur d, qui suite à la conversion électromécanique amorti la masse sismique. Ce modèle est applicable pour tous les trois types de transducteurs vus : - Piézoélectrique : On utilise un matériau piézoélectrique qui converti en électricité la tension du ressort ; - Electromagnétique : Un aimant attaché à la masse induit par son mouvement une tension au bornes d'une bobine ; - Electrostatique : La disposition dans une masse d'un électret avec une charge permanente induit une tension aux bornes du condensateur suite à ce déplacement. L'amortisseur ainsi représenté possède une composante mécanique ainsi qu'une composante électrique due à la conversion d'énergie mécanique en électricité. Avec
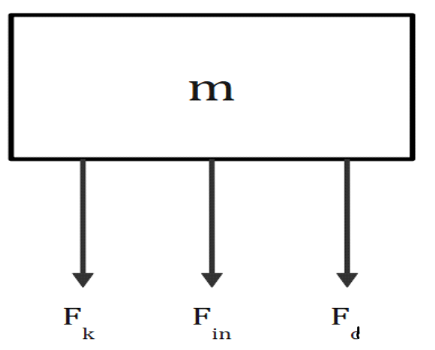
Figure 23 : Modèle de Williams et Yates Voici à présent son diagramme de corps libre ( Figure 24)
Figure 24 : Diagramme de corps libre du modèle On souhaite évaluer le déplacement relatif que subit la masse en fonction du signal d'excitation. On définit les forces d'amortissement
Sachant que la masse subit un déplacement de d'amplitude x suite à l'excitation :
En appliquant la seconde loi de Newton on obtient :
On note
En considérant que le système est soumis à un signal d'excitation périodique on peut alors alors passer dans le domaine de Laplace pour étudier l'évolution fréquentielle du système, tout en considérant les deux composantes de l'amortissement.
Avec
Avec
Cette expression du module de Z en fonction de la pulsation
permet de démontrer l'influence des facteurs L'équation 3-7 peut être réécrite comme suit :
Avec :
En passant dans le domaine de Laplace on obtient :
Partant de la fonction de transfert on tire le module de Z :
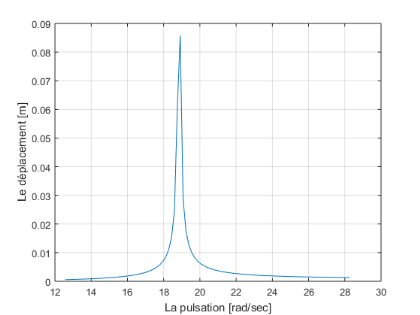
Simulons à présent cette équation dans Matlab, pour un élément du module piézoélectrique : - La masse vibrante est calculée en connaissant les dimensions de l'élément récupérateur ainsi que ses propriétés physiques - La pulsation d'excitation est prise en fonction du trafic estimé à 3 Hz Les données du script ont été calculés de la manière suivante : - Connaissant les dimensions des masses nous avons calculé le volume des masses métalliques en laiton que nous avons multiplié par la masse volumique ; - Avec la pulsation et la masse connue, nous avons calculé la raideur de la masse vibrante ; - Avec masse et raideur connus ainsi que le coefficient Qm pour le PZT-4, nous avons calculé l'amortissement d - Avec le module d'élasticité du laiton et la contrainte appliquée connue, on a déduit l'amplitude de l'excitation. %%%%%%%%% % Script de l'étude fréquentielle du déplacement % L'objectif est de démontrer le comportement fréquentiel du déplacement % relatif de la masse, et doc le comportement de la puissance dans le % domaine fréquentiel %%%%%%%%% % Mike Kapapa %%%%%%%%% clc clear close Détermination des paramètres Y = 0.00072; %l'amplitude de l'éxcitation [m] k = 2.4764; %la raideur du matériau vibrant [N/m] m = 0.00697; %la masse du matériau vibrant [kg] w0 = sqrt (k/m) %la pulsation de résonance [rad/sec] w = linspace((w0/1.5),(1.5*w0),100); %la variation de la pulsation d'éxcitation d = 0.0002875; %la valeur de l'amortisement w0 = 18.8492 Calcul du déplacement z = ((w.^2).*Y)./(sqrt((w0.^2-w.^2).^2)+(2.*zeta.*w0.*w).^2); %le déplacement relatif de la masse en mètre frqc = w0/(2*pi) %la fréquence de passage des véhicules plot (w,z) grid on Zres = find (z==max(z)) wres = w(Zres) %la pulsation correspondant au maximum de puissance xlabel ('la pulsation') ylabel ('le déplacement') frqc = 3.0000 Zres = 41 wres = 18.9127
Figure 25 : évolution fréquentielle du déplacement relatif de la masse sismique On remarque clairement sur le graphe de la Figure 25 les observations suivantes : - Il y a une nette augmentation de l'amplitude de déplacement relatif à la résonance - Moins la fréquence est grande moins le déplacement est important. D'où l'intérêt de placer des modules piézoélectriques à des lieux très fréquentés, ce qui a pour conséquence directe une augmentation de fréquence. Nous pouvons maintenant calculer la puissance
récupérée, c'est-à-dire la puissance qui
est
En considérant une fonction sinusoïdale comme signal d'excitation et partant de l'équation (3-20) on peut déduire la forme temporelle de l'excitation :
La puissance récoltée devient alors :
Avec A la pulsation, lorsque
En théorie, un coefficient d'amortissement du système de zéro pourrait générer une puissance infinie à la résonance, mais en pratique cela est impossible juste de par le choix du matériau un coefficient d'amortissement existera. Cette expression de la puissance fait ressortir les faits importants suivants : - La puissance électrique maximale théorique que peut générer un module est directement proportionnel au cube de la fréquence d'excitation - La puissance est directement proportionnelle au carré de l'amplitude des déplacements imposés par la charge, d'où l'intérêt des routes plutôt que des voies piétonnes. - La puissance récoltée est fonction du
matériau choisi, de sa conception et de sa géométrie car
le coefficient d'amortissement global - La puissance récoltée ne varie pas de manière linéaire par rapport à la charge appliquée ; - La puissance récoltée est maximale à la résonance, en même temps elle est grande à de fréquences élevées. |
|



 le déplacement de la masse sismique par rapport à sa
position initiale et
le déplacement de la masse sismique par rapport à sa
position initiale et 
 le déplacement relatif de la masse par rapport au boitier (la
boitier effectuant un mouvement en phase avec l'écxitation).
le déplacement relatif de la masse par rapport au boitier (la
boitier effectuant un mouvement en phase avec l'écxitation).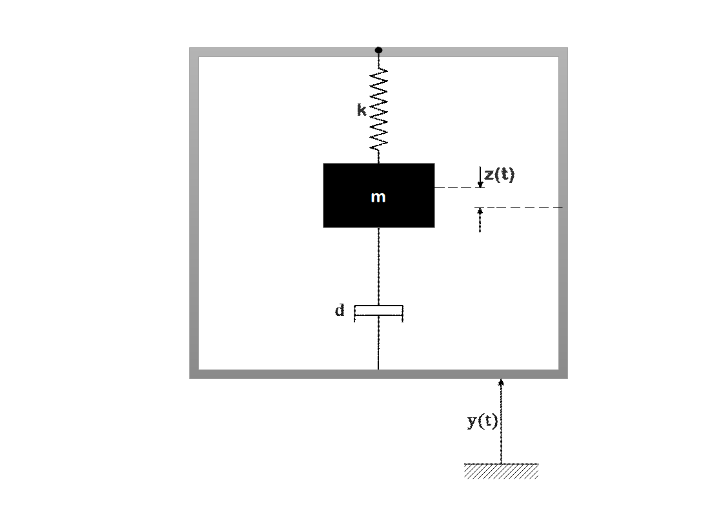

 et de rappel du ressort
et de rappel du ressort 
 qui respectivement subissent les effets cumulés de vitesse et de
longueur.
qui respectivement subissent les effets cumulés de vitesse et de
longueur.




 le déplacement relatif de masse m
le déplacement relatif de masse m





 ; évaluons la fonction de transfert.
; évaluons la fonction de transfert.

 la pulsation propre du système
la pulsation propre du système 
 le facteur de qualité mécanique et
le facteur de qualité mécanique et 
 le facteur de qualité électrique :
le facteur de qualité électrique :

 (d'où son apparition lors du choix des matériaux dans le
chapitre précédent) et
(d'où son apparition lors du choix des matériaux dans le
chapitre précédent) et 
 . Le facteur de qualité mécanique est imposé par la
structure et les matériaux utilisés tandis que le facteur de
qualité électrique peut quant à lui être
varié en fonction de la résistance de charge du matériau
piézoélectrique. Le déplacement Z est fonction donc des
deux facteurs de qualité et la puissance récoltée est
elle-même fonction de ce déplacement comme le démontre les
expressions suivantes.
. Le facteur de qualité mécanique est imposé par la
structure et les matériaux utilisés tandis que le facteur de
qualité électrique peut quant à lui être
varié en fonction de la résistance de charge du matériau
piézoélectrique. Le déplacement Z est fonction donc des
deux facteurs de qualité et la puissance récoltée est
elle-même fonction de ce déplacement comme le démontre les
expressions suivantes.

 : le facteur d'amortissement de la structure
: le facteur d'amortissement de la structure





 le coefficient d'amortissement du système.
le coefficient d'amortissement du système.
 l'expression de P devient :
l'expression de P devient :

 de la structure en dépend ;
de la structure en dépend ;