I.4.2.2 Observateurs
Par la suite, nous ferons référence à la
stratégie appelée par certains auteurs << par
observateurs >> ou encore << en boucle fermée
>> par opposition aux méthodes en boucle ouverte, qui
correspondent à celles de l'espace de parité décrite
précédemment.
I.4.2.3 Estimation paramétrique
L'approche d'estimation paramétrique mesure l'influence
des défauts sur les paramètres et non plus, comme
précédemment, sur les variables du système physique.
Le principe consiste à estimer en continu des
paramètres du procédé en utilisant les mesures
d'entrée/sortie et en l'évaluation de la distance qui les
sépare des valeurs de référence de l'état normal du
procédé .
L'estimation paramétrique possède l'avantage
d'apporter de l'information sur la taille des déviations. Toutefois, un
des inconvénients majeurs de la méthode réside dans la
nécessité d'avoir un système physique excité en
permanence. Ceci pose des problèmes pratiques dans le cas de
procédés dangereux ou fonctionnant en mode stationnaire. De plus,
les relations entre les paramètres mathématiques et physiques ne
sont pas toujours inversibles de façon unitaire, ce qui complique la
tâche du diagnostic basé sur les résidus.
Défauts Inconnues

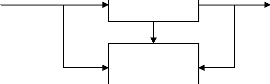
Procédé
Estimation
des
paramètres

Paramètres physiques

Décision
Résidu

Figure I.5 : Estimation paramétrique pour la
détection et le diagnostic de défauts I.5 Description des
différentes méthodes d'analyse:
Le diagnostic en ligne de défauts rotoriques dans les
machines asynchrones en vu d'aboutir à une maintenance prédictive
a poussé les chercheurs à mettre au point diverses techniques. La
majorité de ces travaux se sont basés sur la signature de
grandeurs externes telles que (courant, couple) utilisant la théorie de
champs tournants et celle des circuits électriques.
Durant la décade passée, les équipes de
Williamson et Smith ont basé leur étude faite en
régime permanent sur la détection des signaux modulés
à une fréquence double du glissement (2*g*fs) apparaissant lors
de dissymétries rotoriques suite à des défauts de cage.
Ils ont utilisé le schéma multi- enroulement
équivalent, où chaque maille électrique est
assimilée à un enroulement monophasé
générant deux champs tournant en sens inverse à la
fréquence( g*fs ) par rapport au rotor, donc à la
fréquence de Delerio :
fk = fs [(k/p). (1-g)+g]
Oü
k : rang harmonique
p : nbre de paire de pôles g : le glissement
fs : fréquence fondamentale
Par rapport au stator. Ils ont constaté une diminution des
courants statoriques ainsi que du couple et une surcharge en courant dans les
barres voisines au défaut.
Ils ont conclu aussi qu'il est difficile de détecter la
première barre cassée à cause de la faible amplitude de la
raie de défaut.
T.Boumegoura << recherche de signature
électromagnétique des défauts dans une machine asynchrone
et synthèse d'observateurs en vue du diagnostic » a fait une
étude sur les effets des défauts de la machine asynchrone et a
proposé une approche qui repose sur la surveillance de paramètres
de modèles comportementaux de la machine, sensible au défauts :
Les résistances rotoriques d'un modèle triphasé,
l'inductance magnétisante et la résistance rotorique d'un
modèle diphasé.
Des outils de détection des défauts rotoriques,
basés sur des observateurs de Kalman et grand gain étendu
adaptés aux systèmes non- linéaires ont été
synthétisés pour tracer les paramètres
précédents.
S. Amrane elle a envisagé une
surveillance en ligne des machines (concept de maintenance prédictive)
et elle a particulièrement intéressé à la
détection de défauts de cages de moteurs d'induction, en
utilisant une approche analytique basée sur la signature des de
grandeurs externes. Et pour améliorer le diagnostic elle a
proposé un mode de surveillance actif par action sur les grandeurs
d'entée et de sortie du système.
Gaétan. Didier, Hubert. Razik ont
développé une technique maintenant répandue qui est
l'<< analyse de la signature du courant du moteur » en vue
de la détection d'une panne électrique ou mécanique et ils
ont posé l'accent sur la détection d'un défaut au rotor,
rupture partielle ou non d'une barre de la cage d'écureuil ou d'une
portion d'anneau, par l'analyse spectrale du courant absorbé au
réseau électrique.
Jufer et abdellaziz ont proposé un
schéma multi- enroulement équivalent à la cage rotorique
tenant compte de l'influence du stator par le biais de sources de potentiel
équivalentes à l'effet du bobinage en utilisant la théorie
des deux axes.
Ils ont mis en évidence le même
phénomène de modulation en amplitude du courant statorique
à (2.g.fs), mais le champ d'application de leur méthode se trouve
limité par le fait qu'il ne considère que des défauts
concentrés suite à un phénomène d'avalanche ne
touchant que les
barres adjacentes au défaut : surcharge du courant direct
(id) en cas de barres cassées et surcharge du courant transversal (iq)
en cas de rupture d'anneaux.
E.ritchie, X.deng and T.jokinen
ont fait une étude en régime dynamique utilisant le
schéma multi- enroulement avec référentiel lie au
rotor.
Les résultats de simulation de la cage saine concordent
très bien avec ceux de l'expérience de modèle étant
limite en cas de rupture de barres, ils ont proposé d'affecter à
la résistance de la barre casée une valeur finie au lieu d'une
valeur infinie pour prendre en compte les courants inter- barres.
Roland casimir « diagnostic des
défauts des machines asynchrones par reconnaissance des formes
» a fait une approche qui est basée sur l'utilisation des
méthodes de reconnaissance des formes. Un vecteur de paramètres,
appelé vecteur forme, est extrait de chacune des mesures
effectuées sur la machine. Les règles de décisions
utilisées permettent de classer les observations, décrites par le
vecteur forme, par rapport aux différents modes de fonctionnement connus
avec ou sans défauts.
Des défauts ont été créés au
rotor et au stator de la machine asynchrone, alimentée soit à
partir du réseau, soit par le biais d'un onduleur de tension.
Les procédures de décisions, basées sur
la règle des k- plus proches voisins et sur le calcul
direct des frontières, ont été utilisées pour
détecter les défauts. Ces algorithmes ont montré
l'efficacité de l'application de la reconnaissance des formes au
diagnostic.
Vas, filippetti ont proposé des
modèles de (N+3) mailles et deux axes ( d et q ) à partir d`un
schéma multi-circuits pour la simulation de la cage saine et celle en
défaut des machines asynchrones en régime transitoire moyennant
la résistance Rr et l'inductance Lr équivalentes.
Leur choix de signature du défaut de cage s'est
porté sur la composante directe (ids) du courant statorique qui
n'était faible que pour un nombre élevé de barres
cassées.
Dorell, Paterson, ont opté pour l'analyse
spectrale du courant de phase statorique, ils ont constaté que :
La fréquence (1-2.g.fs) domine lorsque la tension est
réduite ou si l'inertie est grande la fréquence (1+2.g.fs) domine
lorsque la tension est élevée o si l'inertie est faible.
| 

