ANNEXES
Annexe A. Transformation de Park.
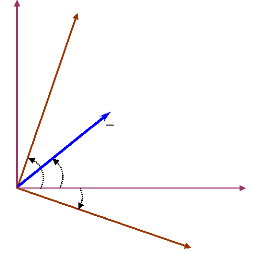
Afin d'établir les équations décrivant le
comportement du système globale, il est nécessaire de ramener les
grandeurs (décrits dans un repère local d-q) de chaque
générateur à un seul repère commun pour tous les
générateurs, il s'agit du repère D-Q, comme le
montre la figure (1A).
L'axe réel (D) du repère commun est
habituellement employé comme une référence pour mesurer
l'angle de rotor de machine. Pour une machine représentée en
détail comprenant la dynamique d'un ou plusieurs circuits de rotor,
l'angle ä de rotor est défini par l'angle entre l'axe
(q) de la machine et l'axe réel (D), comme il est
montré par la figure suivante.
Pour une machine représentée par un
modèle classique, l'angle de rotor ä est l'angle entre la
tension E' et l'axe réel
(D), (Chatelain, 1983). En régime dynamique,
l'angle ä se varie avec la vitesse de rotor.
Q
q
V
ä
á
D
ä
d
Figure 1A. Changement de
référentiel du repère local (d-q) au repère commun
(D-Q).
De la figure (1A), soit V un vecteur dans l'espace. Dans
le repère (D-Q), il s'écrit :
V ( DQ) = Ve (1A)
já
Alors que dans le repère (d-q), il s'écrit
:
V dq Ve (2A)
j ( )
á - ã
=
( )
Sachant que ã =ä- 90°,
l'équation (2A) devient :
V dq Ve e (3A)
j á j ä
- - °
( 90 )
=
( )
Ainsi, le passage d'un repère à l'autre s'effectue
par une simple rotation comme l'exprime l'équation suivante :
V dq V DQ e (4A)
j ( 90 )
° -ä
( ) ( )
=
En décomposant en parties réelle et imaginaire et
en regroupant sous forme matricielle, on obtient les équations
décrivant le passage d'un repère à l'autre:
? -
sin cos
ä ä ?
? ?
?cos sin ä ä ?
? V ?
D
? ?
? VQ ?
? V ?
d
? ?
? V q ?
? V ?
Q
? ?
? V D ?
?sin cos
ä ä ?
? ?
?
- cos sin
ä ä ?
? V ?
d
? ?
? V q ?
( ( ) )
C E S X X I
' + - ' Ä
ij qj ij qj dj qj ä j (10A)
Ä = ?
I Y
di ij
- Ä ? + ? ? Ä
Y S E Y C X X I
ij qj dj qj
( )
ij ij
qj ij
(5A)
Annexe B.
Modèle linéaire.
Appliquons la méthode de la linéarisation sur
l'ensemble des équations différentielles non-linéaires,
(31), (32), (33) et (34). Nous obtenons alors l'ensemble des équations
suivantes :
1
Ä & = Ä ? Ä ? Ä
ù i T T D
( )
mi ei i ù i (6A)
2 H i
Ä ä i = ù 0 Ä
ù i
1
& (7A)
Ä & ' =
E ( ( ) )
T '
qi
doi
Ä ? Ä ? ? ? ? Ä
E E X X I (8A)
fdi qi di di di
1
Ä & = ? Ä ? Ä ? Ä
E ( ( ) )
K V U E (9A)
fdi ai ti Si fdi
T ai
Pour obtenir le modèle d'état, nous devons
exprimer ces équations linéaires uniquement en fonction des
variables d'état. Pour ce faire, nous commençons par appliquer la
méthode de la linéarisation sur les deux composants du courant
Ii, décrits par les équations (39) :
Ainsi pour Idi :
Ä = Ä ä + Ä + Ä
[ ] [ ][ ] [ ][ ] [ ][ ]
I P Q E M I
' (11A)
d d d q d q
Où :
P Y C E S X X I j i (12A)
dij ij ij qj ij qj dj qj
= - + - ?
[ ' ( ' ) ]
P dii P dij (13A)
= - ?
j i
?
Qdij = -Y ij S ij (14A)
Mdij = Y ij C ij X qj -
X dj (1 5A)
( ' )
|
De même, en ce qui concerne le courant
Iqi, nous obtenons :
(1 ( )) ( ( ) )
- ? ? Ä = ? ' - - ' Ä
Y S X X I Y S E C X X I
ii ii qi di qi ij ij qj ij qj dj qj ä j
+ Ä ? + ? ? Ä
Y C E Y S X X I
ij ij qj ij ij qj dj qj
( )
|
(16A)
|
Ä = Ä ä + Ä (17A)
[ ][ ] [ ][ ] [ ][ ]
L I P Q E '
q q q q q
Où :
PY S E C X X I j i (18A)
qij ij ij qj ij qj dj qj
= - - - ?
[ ' ( ' ) ]
P qii P qij (19A)
= - ?
j i
?
Q qij = Y ij C ij (20A)
Lqii Y ii S ii X qi X di j
i
= 1 - ( - ' ) = (21A)
Lqij Y ij S ij X qj X dj j
i
= - ( - ' ) ? (22A)
Pour le calcul de tous les coefficients P, Q,
L et M, les valeurs initiales de
E'qj, Iqj, äj doivent
être utilisées.
En remplaçant successivement les matrices
[ÄId], [ÄIq], des équations (11A)
et (1 7A), nous obtenons tous calculs faits les solutions suivantes :
[ÄId]=[Yd][ÄE ' q
]+[Fd][Ää] (23A)
[ÄIq]=[Yq][ÄE'q]+[Fq][Ää]
(24A)
Où :
[Yd]=[Qd]+[Md][Yq]
(25A)
[Fd]=[Pd]+[Md][Fq]
(26A)
[ ] [ ] 1 [ ]
Y q L q - Q q
= (27A)
[ ] [ ] 1 [ ]
F q L q - P q
= (28A)
Le Calcul des constantes K1ij...K6ij : de la
linéarisation est réalisé de la façon suivante :
1. En Linéarisant l'équation du
couple électrique de la ième machine,
donnée par l'équation (35), nous obtenons :
Ä = + ? + ? Ä
T E X X I F X X I F
[( ( ) ) (( ) ) ]
' ' '
ei qi qi di di qij qi di qi dij ä j
|
+ + - + -
[( ( ) ) ((
E X X I Y X
' '
qi qi di di qij qi
|
X '
di
|
I Y E '
) ) ]
qi dij qj
Ä
|
(29A)
|
|
++ - + -
[( ( ) ) (( )
E X X I Y X X I
' ' '
qi qi di di qii qi di qi
|
|
Y I E '
) ]
dii qi qi
+ Ä
|
Ä = Ä ä + Ä + Ä (30A)
T K K E K E
' '
ei ij j ij qj ii qi
1 2 2
Où :
K1 ij =DtFdij +Q t F
qij (31A)
K ij D t Y dij Q t Y qij j
i
2 = + ? (32A)
K ii D t Y dii Q t Y
qii I qi j i
2 = + + = (33A)
Dt(
X qi X ' di ) I qi = - (34A)
Q
t = E ' qi + (Xqi - X '
di )I di (3 5A)
En remplaçant ÄTei tirée
de l'équation (30A) dans l'équation (6A), nous obtenons: 1
Ä = ? Ä ? Ä ? Ä ? Ä + Ä
ù& ä ù
( )
K K E K E D T
' ' (36A)
i 1 2
ij j ij qj ii qi i i mi
2
2H
2. La tension interne linéairisée
de la ième machine, donnée par
l'équation (8A), peut être réécrite comme suit :
(1 ) ( )
+ Ä = Ä ? ? Ä
ST E E X X I
' ' ' (37A)
do i qi fdi di di di
En remplaçant ÄIdi tirée
de l'équation (23A) dans cette dernière équation et en
arrangent le résultat, nous obtenons de même:
1
) (38A)
(1 ) (
' '
+ Ä = Ä ? Ä ? Ä
ST K E K E K
' ä E
doi ii qi ii fdi ij j
3 3 4 qj
K3 ij
Ä & = ? Ä ä ? Ä ? Ä +
Ä
1 1 1
' '
( E E
'
E E

K ) (39A)
qi T ' 4 ij j qj qi fdi
j
K K
doi 3 i3ii
Où :
K ij X di X di Y dij j i
3 [( ) ]
' -1 ?
= - (40A)
K ii X di X di Y dii j i
3 [1 ( ) ]
' -1
= + - = (41A)
K ij ( X di X ' di ) F
dij
4 = - (42A)
3. La linéarisation de l'équation
(38) représentant la tension terminale de la
ième machine et les équations (36), (37)
constituant les composantes de cette tension nous donne :
V ti ÄV ti =
Vdi Ä Vdi + V
qi ÄV qi (43A)
ÄV di = XqiÄIqi (44A)
ÄV qi = ÄE qi -
XdiÄIdi (45A)
En utilisant les équations (23A), (24A), pour exprimer
ÄIdi, ÄIqi dans l'équation (43A), nous
obtenons :
1 1 '
V X F V V X F ) ä
di qi qij ti qi di dij
? Ä
-
( )
V V X Y V V X Y V V E
- - -
1 1 ' 1 '
ti di qi qij ti qi di dij ti qi qi
? + Ä
ÄVti
(V -
ti
(46A)
ÄV ti = K ij Ä ä
j + K ij Ä E qj (47A)
'
5 6
Où :
|
K ij D v X qi F qij Q
v X ' di F dij
5 = -
|
(48A)
|
K D X Y Q X Y Q (49A)
ij v qi qij v di dij v
= - ' +
6
Dv V ti - 1 V di
= (50A)
Q
v V ti - 1 V qi = (51A)
En remplaçant
ÄVti tirée de l'équation (47A) dans
l'équation (9A), nous obtenons :
Ä & = - Ä ä - Ä + Ä ?
Ä
1 ( )
K K K K E K U E
'
E (52A)
fdi Ai ij j ai ij qj ai Si fdi
5 6
T ai
| 

