III. ETAT DE L'ART DES TECHNIQUES D'ESTIMATION DE LA
POSITION
ET DE LA VITESSE DESTINEE A LA COMMANDE SANS CAPTEURS
1. Introduction
Les capteurs mécaniques, qui font partie
intégrante de l'ensemble alimentation - convertisseur - machine,
possèdent de nombreux inconvénients. En effet, leur emploi
génère une augmentation non négligeable du coût et
parfois du volume du moteur. Pour des moteurs de petite taille, la
présence d'un tel capteur au niveau de l'arbre peut rendre ce dernier
quasi-inaccessible. De même, pour des moteurs à arbre creux, le
couplage du capteur avec le rotor peut s'avérer délicat.
L'installation de ces dispositifs de mesure nécessite un calage relatif
au rotor. Cette opération s'avère laborieuse à reproduire
en série, même si elle peut être réalisée par
la commande numérique. Pour pallier les inconvénients
mentionnés ci-dessus une méthode consiste à mettre en
oeuvre une détection indirecte de la position.
La commande sans capteur de position pose deux
problèmes majeurs. Le premier concerne la localisation de la position
initiale du rotor. La connaissance de la position initiale est
nécessaire à la fois pour démarrer le moteur avec le
couple maximum et pour éviter une rotation du moteur dans le sens
inverse. Le second problème consiste à assurer l'autopilotage
malgré les variations paramétriques et des différentes
perturbations agissant sur l'axe du moteur.
Dans le cadre de nos travaux d'initiation à la
recherche, nous avons étudié une structure de commande permettant
de supprimer le capteur de position. De plus, cette structure doit être
robuste aux variations paramétriques et aux différentes
perturbations. Avant d'introduire la structure étudiée, nous
allons effectuer un bref rappel bibliographique sur les stratégies de
reconstruction de la position rotorique [VAS] [JOHN99] [ERTU] [JABB] [BAG99],
en décrivant les principales méthodes, avec leurs avantages et
leurs inconvénients.
De nos jours, la commande vectorielle de la MSAP se voit
remplacée par la commande vectorielle sans capteurs mécaniques
pour des raisons aussi bien d'ordre économique que technique.
Vu la diversité des nouvelles méthodes, il n'est
pas évident de trouver la seule et meilleure
façon de classer
les techniques d'estimation de position et de vitesse de la commande sans
capteur mécanique des moteurs électriques.
Plusieurs techniques ont été publiées auparavant et
nombreux sont les nouvelles méthodes développées au
troisième millénaire ; c'est sur cette base que nous allons
classifier ces techniques en quatre principaux groupes :
v Les techniques utilisant les mesures
algébriques
v Techniques utilisant la f.e.m
v Techniques basée sur la logique floue et
réseau de neurones
v Les techniques utilisant les observateurs
2. Techniques utilisant les mesures
algébriques
Nous allons nous limiter pour ce sous ensemble à trois
techniques.
2.1. Méthodes utilisant les tensions et les
courants pour calculer le flux principal
Les méthodes similaires sont présentées dans
[WU9 1] [SENJ]. On considère l'équation électrique :
Cette équation est intégrée pour avoir le
flux :
t
Ö = ( . )
v - R i dt
0
La connaissance de la position initiale, des paramètres
de la machine et de la relation liant le flux principal à la position du
rotor permet l'estimation de cette dernière grandeur. La vitesse est
estimée en déterminant le taux de variation du flux principal
résultant de cette intégration. Une variante de cette
méthode procède par une extraction polynomiale basée sur
les valeurs précédentes de la position pour prédire la
position suivante. Les méthodes basées sur le calcul du flux
principal ont permis de s'affranchir de besoin du neutre en utilisant les
tensions composées au lieu des tensions simples ; cet avantage est le
côté attirant principal de ces méthodes. D'autres
techniques ont combiné, pour réguler la boucle de vitesse, les
méthodes de calcul du flux avec des stratégies de commande
perfectionnées telles que les observateurs d'état, la commande
adaptive.
2.2. Méthode utilisant la différence entre
des prédictions modèle de la tension du courant et leurs valeurs
réelles
Cette méthode a été publiée par N.
MATSUI, dans [MATS-1] [MATS-2] [MATS-3]. Cet auteur a fondé la
théorie de sa méthode sur le modèle de la machine
représentée dans un référentiel de Park d-q
lié au rotor. Les tensions et les courants mesurés sont
projetés dans ce référentiel puis comparés à
leurs images obtenues par reconstruction dans un référentiel
semblable mais hypothétique. Les différences
obtenues informent sur la variation de la position qui s'est produite depuis la
position précédente [WAT].
2.3. Méthode utilisant les équations, les
paramètres connus de la machine et les manipulations
algébriques
En ce qui concerne l'estimation de la position et de la
vitesse, ce type d'estimateur utilise la théorie des
référentiels et des transformations géométriques en
plus des équations et des paramètres de la machine. Initialement
les tensions et les courants mesurés sont transformés dans des
référentiels de Park liés au rotor et au stator. Le
passage du référentiel statorique à celui rotorique est
donné par la transformation matricielle standard suivante :
x x
cos sin
û û
--
dr ds
=
x x
sin cos
û û
qr qs
Cette transformation permet de substituer les variables
liées au référentiel statorique dans les équations
de la machine représentée dans le référentiel
rotorique. Un fois que ces équations sont totalement en terme de
variables statorique, les manipulations convenables conduisent à une
expression de la position [WAT]. Ensuite, étant donné le flux
rotorique ctm, l'expression de la vitesse est
déduite pour une machine isotrope. On trouve
des variantes de cette méthode dans d'autres
publications.
3. Autres techniques d'estimation
3.1. Techniques utilisant l'acquisition de la
f.e.m aux bornes de la machine
Dans un fonctionnement à flux orienté de la
machine synchrone, la f.e.m et le courant dans une phase sont
alignés. Les instants de commutation du convertisseur peuvent être
obtenus en connaissant juste le passage par zéro de la f. e.m
et l'angle de la commande [LIZU85]. On détecte le passage par
zéro de la f. e.m lorsque le courant est nul. Une fois les
instants sont détectés et décodés on produit les
signaux de commande du convertisseur. Cette méthode n'est pas praticable
pour des faibles vitesses puisque la f.e.m est nulle à
l'arrêt et proportionnelle à la vitesse en marche. Toutefois,
à très haute vitesse, le procédé d'orientation du
flux est bouleversé d'où une limitation de la vitesse autour de
1000- 6000tr/min.
3.2. Intégration de la f.e.m
La position du rotor est déduite d'une
intégration programmée de la f. e.m de la phase ouverte
du moteur [KONG02] [PET]. L'intégration au moment où cette f.
e.m passe par zéro. L'opération d'intégration est
arrêtée lorsque la f. e.m dépasse un certain seuil
correspondant à l'instant de commutation. Du moment que la f.
e.m peut être supposée linéaire et à pente
indépendante de la vitesse au voisinage du passage par zéro pour
les machines synchrones à f.e.m trapézoïdale, la
tension de seuil peut être prise constante dans toute la plage des
vitesses. Des circuits spéciaux basés sur cette méthode
ont été conçus et commercialisés. Cette technique
est insensible aux bruits de commutation et s'adapte
21
automatiquement à toute variation de vitesse jusqu'une
limite de 3600tr/min. Toutefois elle reste moins efficace concernant les
faibles vitesses.
3.3. Technique basée sur les réseaux de
neurones
De nouvelles techniques basées sur l'intelligence
artificielle sont proposées. Dans [BATZ] les auteurs proposent un
réseau de neurones à propagation inversée établi
sous forme de filet non linéaire liant les grandeurs électriques
mesurées à la position du rotor. La position
générée par ce réseau est utilisée ensuite
pour estimer le flux principal que l'on compare au flux réel
calculé par intégration de la f. e.m mesurée. La
différence obtenue est propagée dans le réseau pour
permettre la modification des paramètres et l'estimation de la position
du rotor. Une valeur initiale du flux ou carrément de la position est
exigée.
3.4. Technique basée sur la logique
floue
Dans [HAMD], un schéma de commande sans capteur
basée sur la logique floue est proposé. Dans cet article le
système de logique floue estime, d'un côté la position du
rotor à partir des mesures des courants et des tensions ; et de l'autre,
il gère les références de courant nécessaires pour
réaliser un mode de fonctionnement à couple maximal ou à
facteur de puissance unitaire. Dans [BIL], un observateur flou est
utilisé pour estimer la position et la vitesse du rotor. Cet observateur
flou prend comme entrée les courants statoriques estimés et la
différence entre les mesures et les estimations de ces derniers.
4. Techniques basées sur les
observateurs
De nombreuses méthodes de commande des processus
utilisent le principe du retour d'état (commande optimale,
découplage, placement de pôles,...). Comme dans la plupart des
cas, les seules grandeurs accessibles du système sont les variables
d'entrée et de sortie, il est nécessaire, à partir de ces
informations, de reconstruire l'état du modèle choisi pour
élaborer la commande.
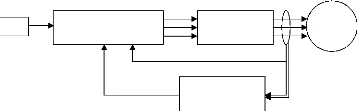
Réf
Régulation de
courant et tension
Position
Vitesse
Courants
Observateur ou
Reconstructeur
Etage de
puissance
Courants & tensions
MSAP
Figure I.16 : Schéma synoptique de la commande
avec observateur
Un reconstructeur d'état ou estimateur est un
système (Figure I.16) ayant comme entrées les entrées et
les sorties du processus réel et dont la sortie est une estimation de
l'état de ce processus.
22
Sous l'hypothèse de linéarité du
modèle du processus, la structure de base de l'estimateur est toujours
la même, mais sa réalisation dépendra du contexte choisi :
continu ou discret, déterministe ou stochastique.
Dans le cas où ce modèle est un modèle
déterministe, le reconstructeur d'état sera appelé
observateur. Dans le cas de systèmes bruités, où
interviennent des phénomènes aléatoires, on parle de
filtre ou filtre de Kalman.
La théorie des observateurs a été
développée initialement par D. Luenberger aux années 1964
[LUEN] [GREL]. Un observateur standard est un système qui a comme
entrées les signaux d'entrée et de sortie d'un processus et
produit à sa sortie le vecteur d'état du système. On
élimine l'erreur d'estimation grâce à une loi de commande
bien appropriée [GREL] [MINZ] [OREIL] [OSTER]. En ce qui concerne les
actionneurs électriques, le vecteur d'état est
généralement constitué des courants et du couple
électromagnétique, en plus de la position et de la vitesse du
rotor. Vu la non linéarité de l'équation d'état,
l'observateur résultant est non linéaire. Il existe deux
approches concernant la théorie des observateurs :
v Les observateurs déterministes
v Les observateurs Optimisant un critère stochastique
Pour les observateurs déterministes on cite :
4.1. Observateur déterministe de
Luenberger
L'observateur de Luenberger est le plus connu dans la classe
de type déterministe [LUEN] [GREL] [OREIL]. A partir des mesures des
entrées et sorties, nous pouvons reconstruire l'état du
système linéaire observable. Il est utilisé dans la
commande par retour d'état lorsque tout ou une partie du vecteur
d'état ne peut être mesuré. Dans sa version étendue,
il permet d'estimer les paramètres variables ou inconnus d'un
système. Dans [BATZ-LEE_1], un observateur déterministe de flux
de type Luenberger est utilisé pour reconstruire la position du rotor.
L'estimateur proposé présente beaucoup d'avantages notamment le
fait qu'il ne dépend pas du tout de la position initiale du rotor et en
plus il fonctionne aussi bien à vitesse avoisinant le zéro
qu'à très haute vitesse. L'implantation de cette technique est
présentée dans [BATZ-LEE_2] où les résultats
expérimentaux ont été présentés et
commentés.
4.2. Observateur à ordre réduit
Dans le cas où seulement quelques unes des variables
d'états seraient intéressantes, on pratique un couplage par
transformation linéaire, des sorties de l'observateur avec le vecteur
d'état du système. L'observateur résultant est d'ordre
inférieur au premier, il a l'avantage d'alléger le temps de
calcul [SOLS] [TAT]. Dans [TAT] [J.KIM] les observateurs à ordre
réduit présentés estiment la f. e.m de la machine
pour déduire la position et la vitesse du rotor.
Une variante de cette technique est l'observateur à
perturbation [MATS-3]. Il est basé sur
l'hypothèse d'un
vecteur d'état quasi statique ; hypothèse justifiable chaque fois
qu'on a
une fréquence d'échantillonnage et un temps de
calcul rapides. Les variations légères des variables
d'états sont dites des perturbations et elles se manifestent par des
petites fluctuations de la position du rotor.
De nouvelles techniques basées sur les observateurs de
flux rotorique à ordre réduit sont présentés dans
[BATZ-LEE_1,2,3] [SHIN]. Ces observateurs publiés dans [BATZLEE_1,2,3]
[SHIN] sont insensibles aux variations des paramètres mécaniques
et sont aussi robustes dans la mesure où la position initiale inconnue
du rotor ne pose pas problème contrairement à nombreuses
méthodes antérieurement proposées.
4.3. Observateur à mode glissant
L'idée de l'observateur par mode de glissement consiste
à utiliser des fonctions de commutation variables de manière
à ce que l'erreur d'estimation converge vers zéro dans une
surface plane glissante de l'espace d'état [FUR] [PEIX]. Le principe de
l'observateur en mode glissant consiste à contraindre les dynamiques
d'un système d'ordre n à converger vers une variété
de dimension (n-p) dite surface de glissement (p étant la dimension du
vecteur de mesure). L'attractivité de cette surface est assurée
par des conditions appelées "conditions de glissement". Si ces
conditions sont vérifiées, le système converge vers la
surface de glissement et y évolue suivant une dynamique d'ordre
(n-p).
En conclusion, l'observateur en mode glissant consiste
à attirer la trajectoire des erreurs d'observation vers une surface
correspondant à une erreur d'estimation de sortie nulle. Sur cette
surface, les dynamiques sont stabilisées de manière à
annuler l'erreur d'estimation.
En ce qui concerne les observateurs optimisant un contexte
stochastique, l'estimation est optimale lorsque les propriétés
stochastiques des bruits sont suffisamment connues. On cite l'estimateur
standard de Kalman et le filtre de Kalman étendu [BOL] [GREL]
[OREIL].
4.4. Estimateur Standard de Kalman
Ce type d'observateur donne une estimation optimale (au sens
d'un critère statistique) de l'état du système
perturbé par des bruits dont les propriétés stochastiques
sont connues. Il est souvent mis en oeuvre pour donner une estimation du flux,
de la vitesse ou des paramètres rotoriques utilisés pour la
synthèse des commandes vectorielles. Dans [BOL], ce type de
reconstructeur est utilisé pour la commande sans capteur des machines
synchrones à aimants permanents.
| 

