ANNEXES
Annexe A : Implantation de l'encodeur
Pour se familiariser avec l'environnement de travail
(commande numérique par ordinateur et carte DSP), nous avons
commencé par l'implantation de l'encodeur. Ce petit travail que nous
présentons dans cette section des Annexes nous a permis de comprendre la
configuration et l'usage du logiciel control desk. Nous avons jugé utile
de bien comprendre le capteur de position car c'est l'élément qui
nous gène et que l'on veut remplacer par nos observateurs de
position.

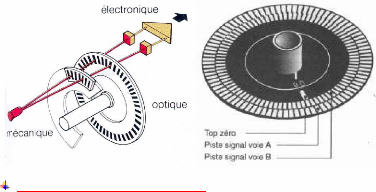
Principe de l'encodeur
incrémental
Le rôle des pistes A et B c'est de déterminer le
sens de rotation de l'arbre de la machine avec lequel est lié l'encodeur
de telle sorte que si A est en avance de phase par rapport a B, la machine
tourne dans le sens 1 et dans le cas contraire c'est le sens 2. L'encodeur se
compose aussi d'un compteur qui compte dans chaque tour 1024 impulsions
Et il se reintialise à l'aide de l'indicateur (piste Z)
qui doit aussi figurer et être initialisé dans le programme
Simulink.
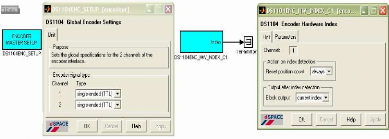
Implantation de l'encodeur via DS1104
Dans la fenêtre MATLAB, on exécute la commande
rti (Real time Interface). On choisit la librairie master PPC puis l'encodeur
DS1 104ENC_POS_C1, DS1 104ENC_SETUP et le bloc DS 11 04ENC_INDEX_C 1. Avant de
commencer la simulation il faut régler les paramètres de ces
blocs de l'encodeur.
|
Configuration de DS1104ENC SETUP
|
Pour ce qui est de la configuration, nous devons
spécifier quel type d'entrée nous utilisons car on a aussi bien
des entrées digitales TTL que des entrées analogiques RS232 et
RS442/485. Dans notre cas on utilise une des entrées digitales.
(canal1)

Reglage de DS1104ENCEPOSC1
On doit spécifier le numéro de l'entrée
car comme nous l'avons dit il en existe deux. Sur l'option Unit
specification, on choisit donc channel number 1. Il faut aussi
régler les paramètres d'initialisation. On a initialisé
à O.

Configuration de DS1104enc INDEX C1
Dans ce bloc on doit indiquer le numéro de
l'entrée (channel number). Pour ce qui est des
paramètres, remettre la position à zéro à chaque
tour et non une seule fois (Always). Ensuite pour le paramètre
output after index detection on met l'option current
index.

Simulation
On sait que le bloc de l'encodeur nous donne comme information
sur l'angle un nombre N proportionnel à ce dernier (1024 par tour). Pour
avoir l'angle en degré nous devons multiplier ce nombre par un gain
à savoir 360/1024.
Quant à la détermination de la vitesse, puisque
le bloc DS 1 04ENC_POS_C 1 nous donne le delta position, il nous suffit de la
diviser par la le delta temps qui n `est rien d'autre que la période
d'échantillonnage Te, puis de la multiplier par un gain (60/1024) pour
avoir la vitesse en tour par minute.
Paramètre d'Affichage :
· Affichage numérique : Aller dans Virtuel
instrument puis sélectionner display puis le mettre dans la
layout et glisser la variable que vous voulez le voir en «
affichage numérique ».
|
Résultats de la simulation :
|
On voit bien (figure B. 1) que la vitesse avant filtrage est
trop bruitée, c'est pour cela qu'on insère un filtre pass-bas
avec une pulsation de coupure (wcf=60). On pourrait envisager un bande passante
beaucoup plus étroite que ça mais on est limité par le
temps de réponse car si on prend par exemple wcf=10, le temps de
réponse de notre filtre serait de 3*0.1s, c'est trop lent comme filtre
!!!
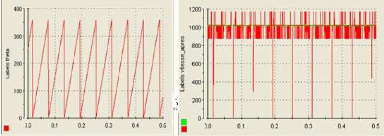
Figure A. 1 angle thêta en degré figure A.2 vitesse
non filtrée et
vitesse filtrée en tr/min
|
On a envisagé un autre type de filtrage discret.
L'idée est de prendre à chaque instant la mesure en cours et
plusieurs mesures précédentes puis calculer la moyenne
arithmétique. Dans notre cas on prend la mesure à l'instant n et
les 9 mesures précédentes. On remarque sous les mêmes
conditions que ce deuxième filtre est moins efficace que le premier car
la vitesse est un peu plus bruitée.
|
|
|
On fait la simulation avec un filtre qui a une bande passante
plus étroite wcf=10 (figure A.3). On voit que la vitesse et tèrs
bien filtrée mais toutefois le temps de réponse de ce filtre est
relativement trop grand.
|
|
|
Figure A.3. Vitesse filtrée en tr/min
|
NOTATIONS
Modélisation de la MSAP
MSAP Machine Synchrone à Aimants Permanents
(d, q) Indice du référentiel de
Park
(á,â) Indice du
référentiel (á,â)
R Résistance statorique
Ld Inductance statorique directe
Lq Inductance statorique quadratique
Lc=L Inductance statorique cyclique
Ms Inductance mutuelle
Ö m Flux d'excitation de l'aimant permanent
Ö Flux statorique
( Ö má , Ö
mâ) Composantes du flux rotorique
( Ö á , Ö
â ) Composantes du flux statorique
Cem Couple électromagnétique
Cr Couple résistant
p Nombre de paires de pôles de la machine
J Moment d'inertie totale de la machine
f Coefficient de frottement visqueux
ùe Pulsation électrique
rotorique
ùm , Ù Vitesse de rotation
mécanique du rotor
èe Angle électrique du rotor
i Courants statoriques
v Tensions simples
ø Déphasage entre le courant et la
tension
Pe Puissance
électromagnétique
KT Constante de couple
Ke Constante de fem
ôù Constante de temps du
modèle convertisseur - machine
Autres notations
ô R/L inverse de la constante électrique
A Matrice d'état du modèle d'état
de la machine dans (á,â)
B Matrice du modèle d'état de la machine
dans (á,â)
C Matrice de sortie du modèle d'état de la
machine
G Gain de l'observateur
x Vecteur d'état
y Sortie de l'observateur
xà Vecteur d'état reconstitué
(estimé)
yà Sortie reconstituée
F matrice d'état de l'observateur de
Luenberger
ëi Valeurs propres de l'observateur
s Opérateur de Laplace
O Matrice d'observabilité
Aii Composante de la matrice A pour l'observateur
réduit
Bii Composante de la matrice B pour l'observateur
réduit
v Nouveau vecteur d'état de l'observateur
réduit
Gr Gain de l'observateur réduit
| 

