19 CHAPITRE 3 :
20
21 RÉSULTATS DE SIMULATION
22
23 3.1. INTRODUCTION
L'objectif de ce chapitre est l'analyse des résultats
de simulation d'un banc d'essais représentatif d'un système
industriel de transfert de matériaux. Ce banc d'essai rentre dans le
cadre des travaux de recherche sur la commande vectorielle de systèmes
multi-moteurs. Le système est composé de cinq moteurs
asynchrones. Cette commande a été développée selon
la méthode indirecte ; cette méthode est détaillée
dans le chapitre 1.
La suite du chapitre est constituée de deux sections.
La première présente les différant schémas des
blocs qui sont utilisés dans notre travail de simulation ; La
deuxième montre les résultats de simulation des trois et cinq
moteurs.
Le système est modélisé sous
MATLAB, version 7.0.4
; les résultats sont validés par simulation
à l'aide de l'interface Simulink intégrée
à Matlab.
3.2. LES DIFFÉRANTS SCÉHMAS DES BLOCS
Le système étudié est composé de
cinq moteurs triphasés asynchrones qui entraînent des rouleaux sur
lesquels défile une bande de papier (la toile).
Chaque moteur est représenté sous forme de bloc
comme suit :
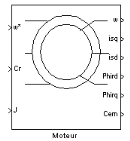
Figure 3.1 : Schéma bloc d'un
moteur.
Le bloc moteur contient les éléments
suivants :
· La commande vectorielle indirecte
(IFOC).
· L'onduleur de tension à commande
MLI.
· Le moteur asynchrone (MAS).
· Contrôleur de vitesse type PI.
· Bloc de défluxage.
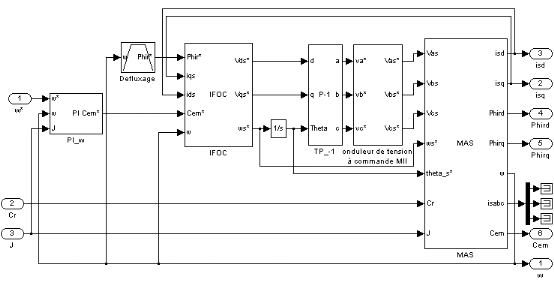
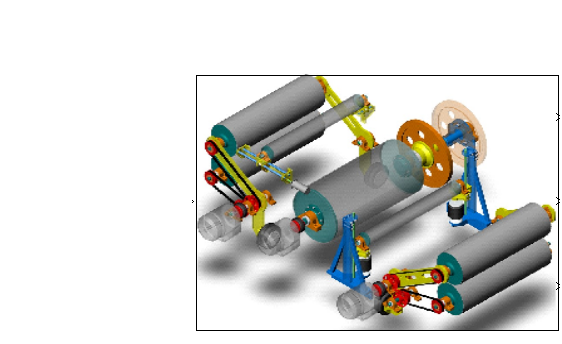
Figure 3.2 : Les
éléments du bloc moteur.
La bande de papier (la toile) est
représentée sous forme de bloc comme suit :
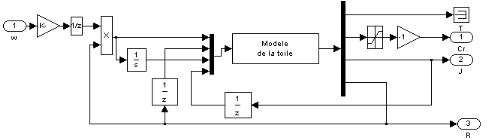
Figure 3.3 : Schéma bloc de
la toile.
Le modèle complet du système avec cinq
moteurs :
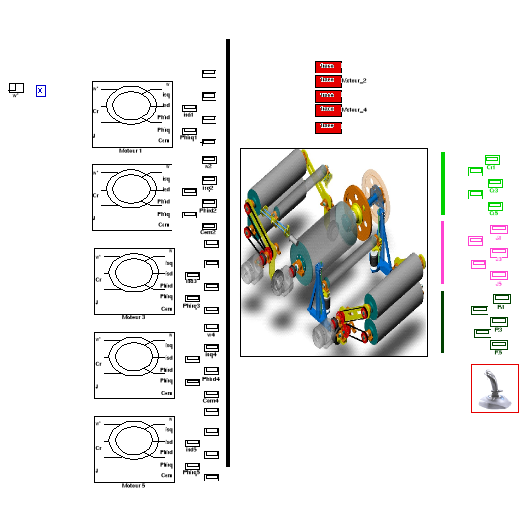
Figure 3.4 : Schéma complet
du système avec cinq moteurs.
3.3. LES RÉSULTATS DE SIMULATION
3.3.1. Résultats de simulation (trois
moteurs)
Pour évaluer les performances du système nous
avons effectués des simulations numériques sous les conditions
suivantes :
§ Démarrage avec application d'un échelon
de vitesse de 50 rad/s.
§ Le moteur M1 à le rôle de débobiner
le rouleau de rayon R1 (R1=2.25 m).
§ Le moteur M2 fait le pincement de la bande.
§ Le Moteur M3 à le rôle de bobiner un
rouleau de rayon R3 ; le bloc STOP a pour but de faire
arrêter légèrement en même temps les
différents moteurs de système jusqu'à où le rayon
régler atteint une valeur désirée (exemple : R3=0.8 m), en
injectant une vitesse de référence nulle.
Les figures 3.(5,6,7) montre que le réglage par un
régulateur PI donne des résultats satisfaisants :
§ La vitesse de rotation suit la vitesse de
référence.
§ Le courant est bien limité à sa valeur
admissible.
§ Les flux ( et et
 ) sont maintenus à leurs valeurs désirées (en effet
le découplage est maintenu). ) sont maintenus à leurs valeurs désirées (en effet
le découplage est maintenu).
§ On remarque que le couple
électromagnétique  suit la valeur du couple résistant
suit la valeur du couple résistant  . .
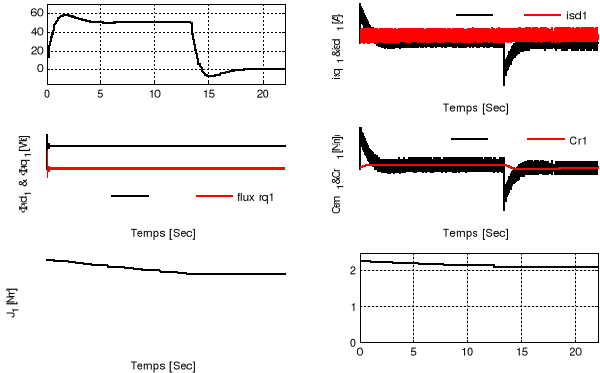
§ On remarque aussi que le moment d'inertie  diminue avec la diminution du rayon
diminue avec la diminution du rayon et
augmente avec son augmentation. et
augmente avec son augmentation.
Figure 3.5 : Résultats de
simulation du premier moteur.
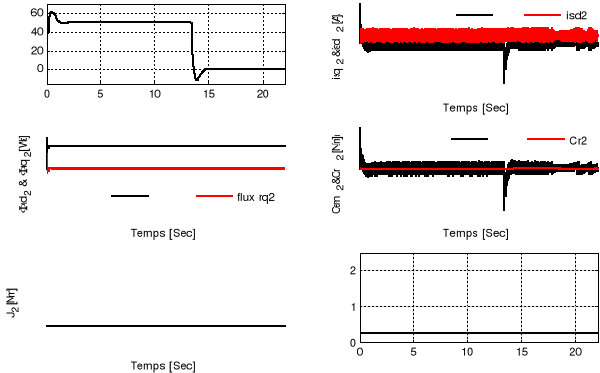
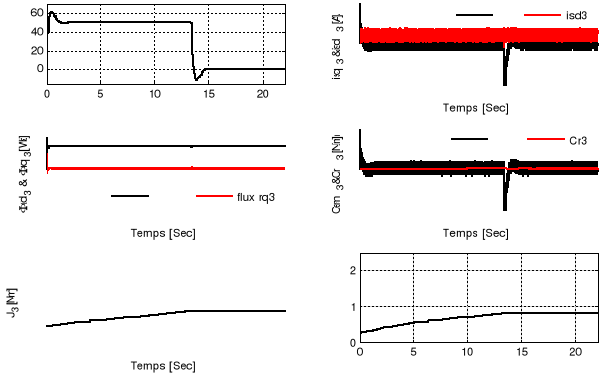
Figure 3.6: Résultats de
simulation du deuxième moteur.
Figure 3.7 : Résultats de
simulation du troisième moteur.
3.3.2. Résultats de simulation (cinq
moteurs)
Pour évaluer les performances du système nous
avons effectués les mêmes étapes de simulation qui ont
faite avec le système à trois moteurs sous les conditions
suivantes :
§ Démarrage avec application d'un échelon
de vitesse de 50 rad/s.
§ Le moteur M1 a le rôle de débobiner le
rouleau de rayon R1 (R1=2.25 m).
§ Les moteurs M2, M3, M4 sont rôle est le
pincement de la bande.
§ Le Moteur M5 a le rôle de bobiner un rouleau de
rayon R5 ; le bloc STOP a pour but de faire arrêter
légèrement en même temps les différents moteurs de
système jusqu'à où le rayon régler atteint une
valeur désirée (exemple : R5=0.8 m), en injectant une vitesse de
référence nulle.
Les résultats de simulation obtenues avec un
système à cinq moteur (Figure 3.(8,9,10,11,12)), ont les
mêmes caractéristiques que celles obtenues avec trois moteurs
(Voire § 3.3.1), néanmoins avec cinq moteurs nous pouvons constater
une net amélioration au niveau des performances de réglage.
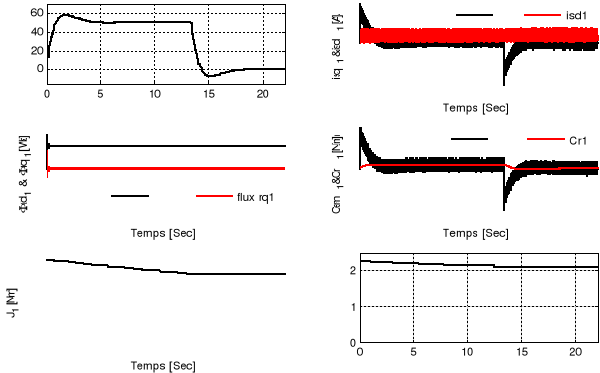
Figure 3.8 : Résultats de
simulation du premier moteur.
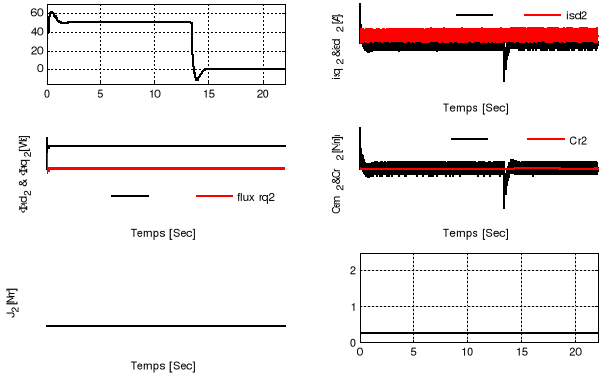
Figure 3.9 : Résultats de
simulation du deuxième moteur.
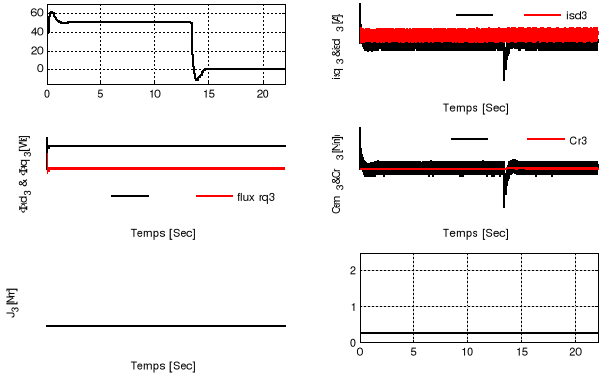
Figure 3.10 : Résultats de
simulation du troisième moteur.
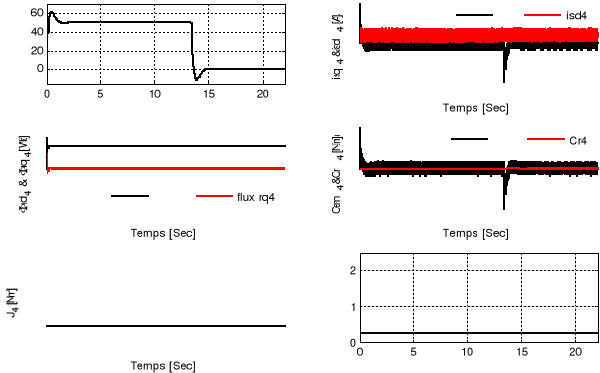
Figure 3.11 : Résultats de
simulation du quatrième moteur.
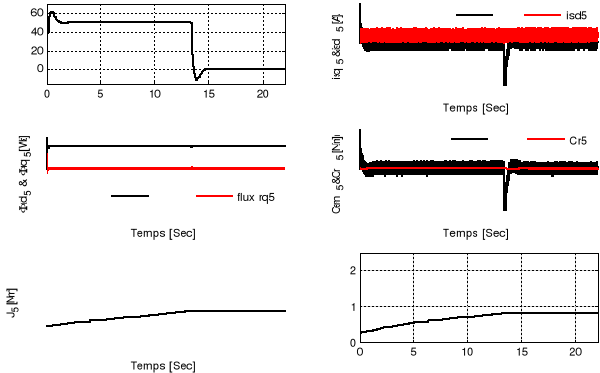
Figure 3.12 : Résultats de
simulation du cinquième moteur.
3.4. CONCLUSION
L'objectif général des processus de transport,
bobinage et débobinage permet avec assurance que l'ensemble travaille en
harmonie et en synchronisme, et surtout d'assurer une bonne qualité du
traitement et du rembobinage du produit.
Dans ce chapitre, nous avons présenté les
résultats de simulation des différents schémas blocs
appliqués à un SMM en série. Les résultats sont
satisfaisants, et en régime permanent est d'une grande rapidité.
En plus, les résultats obtenus montrent que la méthode indirecte
de la commande vectorielle est robuste.

| 

