4.3 Fichier de résultats :
Afin de mieux apprécier les caractéristique
géométrique cinématique et dynamique de robot type, j'ai
déterminé ces derniers pour un seul temps de mouvement T
nécessaire
Les énergies cinétiques potentielles et de
dissipation sont données, les équations de Lagrange sont
établies. Pour effectuer un cycle de travail. J'obtiendrait sur les
graphe ci dessous des figures (4.11),(4.12),(4.13) et (4.14) l'évolution
en fonction du temps des position, des vitesses. Des
accélérations ainsi que des couples et forces pour un temps T
égal à 5, secondes.
Dans ce mémoire j'ai présenté un interface
en exposant les différentes palettes qu'elle comporte, et en expliquant
les différentes possibilités qu'elle offre à
l'utilisateur.
Le logiciel fortran consiste en un langage
interprété qui s'exécute dans une fenêtre dite
d'exécution. L'intérêt de fortran tient, d'une part,
à sa simplicité d'utilisation, et à sa richesse
fonctionnelle arithmétique matricielle et nombreuses fonctions, analyse
numérique, graphique.
En ce qui me concerne, j'ai utilisé la version Fortran
6.1, pour deux raisons la première sa puissance en calcul matriciel,la
deuxième raison ,est l'utilisation des boucles pour l'obtention des
exécutables.
En considérant les systèmes d'équations
différentielle de la géométrie cinématique et
dynamique et après récupération des variables et appel aux
fonctions et affectation de coordonnées et rotations on aboutit à
l'affichage des résultats sous forme de bloques de matrices, on peut
illustré ces résultats numérique en utilisant l'outil
Microsoft Excel.
Dans le cas où les causes structurelles seraient
considérées les paramètres pris en considération
seront l'inertie du rotor, les inerties de l'arbre entrée
réducteur, rapport de réduction et coefficients du frottement
visqueux, en ce qui concerne les termes de Coriolis sont
représenté sou forme matricielle de dimension (n x (n-1) n/2).
Les graphes:
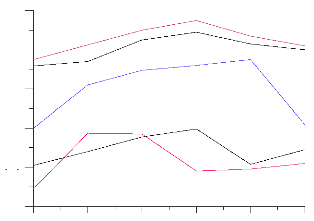
-0.20
q2
position (rad .m)
0.60
q5
q4
0.40
0.20
0.00
q3
q1
-0.40
0.00 1.00 2.00 3.00 4.00 5.00
temps (sec)
Figure 4.11: Positions
Vitesse(rad .m/s) 1.00
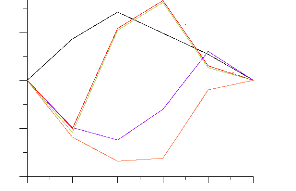
V4
V1
0.50
V5
V3
0.00
V2
-0.50
-1.00
Temps(sec)
0.00 1.00 2.00 3.00 4.00 5.00
Figure 4.12: Vitesses
Accélération(rad .m/s2)
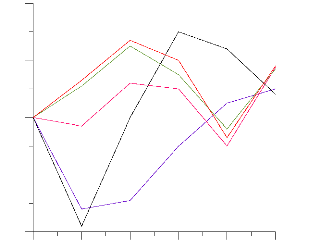
40.00
a5
a1
20.00
a4
a2
0.00
a3
-20.00
-40.00
0.00 1.00 2.00 3.00 4.00 5.00
Temps(sec)
Figure 4.13: Accélérations
Force (N) Couple (N.m)
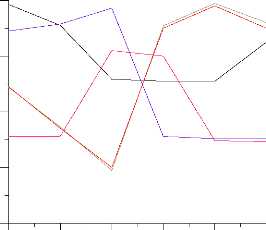
c3
c2
c4
c1
c5
400.00
200.00
0.00
-200 .00
-400.00
Temps(sec)
0.00 1.00 2.00 3.00 4.00 5.00
Figure 4.14: Forces, couples
4.4 Interprétation des résultats :
Un programme de simulation a été finalisé
qui englobe les différentes étapes de l'étude, dont La
partie géométrique illustrée par les différentes
courbes de position de ce robot manipulateur (Figure 4.11). Un régime
adéquat de fonctionnement du robot a été indiqué,
dont la partie cinématique (Figure 4.12) et (Figure 4.13). Et à
la fin les courbes dynamiques (Figure 4.14). Dans mon système,
l'utilisateur peut choisir le type d'actionneur -moteur asynchrones- autre que
les actionneur de type hydraulique, et ainsi faire rentrer les
caractéristiques spécifiques, ceci va faire intervenir la
dynamique des moteurs asynchrones dans la dynamique des différentes
articulations. En peut voire une série de simulations appliquée
au robot en passant par un interface de code source du microcontrôleur du
servomoteur PIC, et une série de capteurs cartes de ENTRE SORTIE
connectées par l'intermédiaire d'un automate et armoire de
commandes,avec les actionneurs du robot situées dans le circuit
hydraulique du robot.
Ce programme nous permet d'étudier n'importe quels
robots industriels pour les différentes stations d'usinage, dont le but
d'augmenter la productivité de n'importe quel atelier d'usinage
flexible.
Si les vitesses augmentent, il est évident que les
modèles calculés sont très loin de la
réalité, parce que d'une part des forces inertielles, centrifuges
et de couplage apparaissent et d'autre part les jeux dus aux frottements et
élasticités de toutes origines ne sont plus
négligés. Il est donc nécessaire de revoir la
modélisation en tenant compte des ces phénomènes
dynamiques. Le calcul effectué détermine les variables
articulaires en fonction des forces (ou / et couples)
généralisés. Pour le calcul j'ai utilisé la
méthode de rung-kutta d'ordre 4 à pas variable pour la
résolution des systèmes différentiels. Un modèle
des déformations est nécessaire, quant à la validation et
comparaison, mes résultats présente une co-ressemblance avec les
résultats [21], [55] et [71], malgré les différences de
performances entre nos robots.
Des paramètres comme la vitesse, la température
ou le temps vont influer et certaines formes d'usure sont relativement
irrégulières, d'autres au contraire provoque des sauts
très brutaux, dont des rapports pouvant aller parfois de 1 à 100
000 ou plus, lorsque certaines valeurs critiques sont franchies.
| 

