3.2 Choix d'une architecture
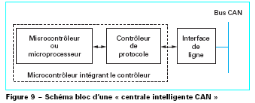
Pour communiquer via le bus CAN, il est nécessaire de
faire appel à un composant, circuit électronique programmable,
dédié au bus CAN. Ces composants se nomment «
Contrôleur CAN », ils assurent une gestion du protocole CAN.
La philosophie du bus CAN impose que chaque noeud soit autonome,
aussi trouve-t-on deux architectures liées à deux familles de
circuits : les contrôleurs indépendants et les
microcontrôleurs intégrant le contrôleur de bus CAN. La
première famille nécessite une unité de traitement de type
microcontrôleur ou microprocesseur pour programmer et dialoguer avec le
contrôleur, voir la représentation des deux architectures en
figure 9.
L'intérêt du bus étant de véhiculer
des signaux sur une certaine longueur, un circuit capable de « doper
» les signaux est généralement nécessaire (driver de
ligne).
On obtient donc une architecture à deux ou trois modules
qui peut se décomposer en un microcontrôleur ou microprocesseur,
un contrôleur de protocole, un driver de ligne.
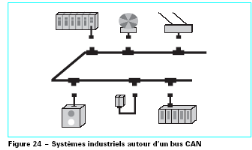
4.3 Systèmes intégrés
Plusieurs sociétés (Allen-Bradley, Honeywell) ont
proposé des systèmes complets pour le contrôle/commande
associés au bus CAN (DeviceNet, SDS).
La figure 24 représente un système mettant en
communication divers éléments industriels [API (automate
programmable industriel), robots, capteurs et actionneurs « intelligents
»...].
Le SDS (Smart Distributed System) est un système de
supervision temps réel multitâches proposé par Honeywell
pour le contrôle et la commande d'une large gamme de dispositifs à
travers un réseau de terrain de type bus CAN.
| 

