|
1
UNIVERSITE DE KINSHASA

FACULTE DES SCIENCES Département des Mathématiques
et Informatique
Directeur : Professeur Ordinaire Mbuyi Mukendi Eugène Co -
Directeur : Professeur Mabela Matendo Rossin
Applications des intégrales Stochastiques en
macroéconométrie
Mambo Ntanu Bin Kikuni Lewis
lewismambo2@gmail.com
4 octobre 2019
1
"In almost all circumstances, and at all times, we find
ourselves in a state of uncertainty. Uncertainty in every sense. Uncertainty
about actual situations, past and present... Uncertainty in foresight this
would not be eliminated or diminished even if we accepted, in its most absolute
form, the principle of determinism; in any case, this is no longer in fashion.
Uncertainty in the face of decisions more than ever in this case... Even in the
field of tautology (i.e of what is true or false by mere definition,
independently of any contingent circumstances) we always find ourselves in a
state of uncertainty ... (for instance, of what is the seventh, or billionth,
decimal place of n ...)..." Bruno de Finetti ([?
],p.3)
» The advancement and perfection of mathematics are
intimately connected with the prosperity of the State»
Napoleon1
1. cited [? ]
2
Notation et Abréviations
1ç(x) fonction indicatrice
lim infxn limite inférieure
lim sup limite supérieure
fl intersection
U union
~ distribuée
oc infini
® produit tensoriel
a A b minimum de a et b
ìeb maximum de a et b
= identiquement égal
an = o(bn)
an
bn ? 0
an = O(bn)
an
bn est bornée
(Ù, 3, P) : espace de
probabilité
N ensemble des nombres entiers
R ensemble des nombres réels
C ensemble des nombres complexes
c`adl`ag continue à droite,
limite à gauche
p.s. presque sûrement
v.a. variable aléatoire
Ls opérateur elliptique
max maximum
min minimum
exp exponentiel
h.it variation quadratique
. :valeur absolue
k.kp norme d'ordre p
Ck dérivable d'ordre k
P somme
f intégrale
X+ partie positive de X
X partie négative de X
E(x) espérance
mathématique
E(x P) espérance
conditionnelle
P(A B) probabilité conditionnelle
var(x) variance de x
? dérivée partielle
?xi
Ati = ti - ti-1
3
f odWt intégrale de Stratonovich
Wt processus de Wiener standard au temps t Bt
mouvement brownien au temps t
Résumé
Motivation
Problem Statement
Approach
Results
Conclusion
Les incertitudes dominent le monde réel et rendent les
décisions issues de la mathématique inefficace. Pour prendre en
compte ces incertitudes observées ou non dans les variables et/ou
paramètres,les mathématiciens désenveloppent la
théorie des processus stochastiques.Beaucoup de phénomènes
sont formulés sous forme des équations différentielles
stochastiques et aussi non observables Xiong[177], [166],[167], [67] [177],
Stokey[166],[67]. La question que ce travail va répondre est comment
peut - on estimer les coefficients stochastiques du modèle
macroéconomique?
La modélisation du monde réel n'a pas de sens
lorsque le modélisateur ne tient pas en compte l'incertitude qui induit
les décideurs en erreur.
Cette étude a trois objectifs :(i) présenter les
outils et
1
Introduction
Problématique
Les équations différentielles stochastiques
constituent un choix naturel pour modéliser les systèmes
dynamiques qui subissent les influences aléatoires [31]. Par exemples,
Beaucoup de phénomènes tant naturels qu'économiques sont
formulés sous forme des équations différentielles
stochastiques [177], [166][167], [67].
Considérons un modèle
économétrique qui se présente sous forme d'équation
différentielle stochastique d'Itô paramétrique suivant
dXt = u(e, t, Xt)dt + u(19, t, Xt)dWt, t = 0, X0 =
(,
où {Wt, t = 0} est le processus de
Wiener standard, u : O × [0,T] × R ? R,
appelé le drift coefficient et u : E × [0, T]
× R ? R+, appelé le coefficient de
diffusion. Ces coefficients sont des fonctions continues et les
paramètres à estimer e et 19, O ? R,
E ? R et E(0) < 8, sont des inconnus du modèle
économétrique à estimer.
Le drift coefficient est appelé le coefficient de
tendance ou damping coefficient ou translation. Le
coefficient de diffusion est aussi appelé volatilité.
Les coefficients de tendance et de volatilité sont respectivement la
moyenne instantanée et la déviation instantanée du
processus.
Sous les conditions lipschitzienne et de croissance
linéaire sur les les coefficients u et u, il existe
une solution forte unique de l'équation différentielle
stochastique.
(1) condition lipschitzienne ku(t,x) -
u(t,y)k = K|x - y| |á(t,x)
- á(t, y)| = K|x - y|
et
(2) condition de croissance linéaire ku(t,
x) - u(t, y)k2 = K(1 +
|x|2) |á(t, x) -
á(t, y)|2 = K(1 +
|x|2)
Cette solution est appelée le processus de
diffusion ou simplement diffusion, est une semimartingale
markovienne forte continue.
En économie, les incertitudes dominent et rendent les
décisions issues de la modélisation économétrique
inefficaces. Pour prendre en compte ces incer-
2
titudes observées ou non dans les variables et/ou
paramètres les mathématiciens développent la
théorie de processus stochastiques. La modélisation de
l'économie dans son ensemble, macroéconomie, n'a pas de sens
lorsque l'économiste ne tient pas en compte les incertitudes qui
induisent les décideurs en erreur.
Cette étude se focalise à répondre aux
questions suivantes : (i) Comment peut - on estimer les paramètres de
modèles économétriques présentés sous forme
des équations différentielles stochastiques? (ii) Comment peut-on
estimer les paramètres stochastiques de modèles
économétriques présentés sous forme des
équations différentielles stochastiques suivant un processus
stochastique?
Objectifs du travail
Cette recherche a trois objectifs : (i) présenter les
outils et techniques de la modélisation stochastique en
général et ceux des intégrales stochastiques en
particulier; (ii) passer en revue l'aspect théorique existante des
applications des intégrales stochastiques à la théorie
d'estimations de paramètres des modèles mathématiques
stochastiques [37],[170], [171], [172], [122], [124], [22], [116], [21], [116],
[117], [110], [31], [177], [17], [98], [141]; et (iii) présenter les
applications de calcul stochastique à la modélisation
économétrique de l'économie congolaise en vue d'orienter
les décideurs congolais.
Revue de la littérature
La littérature sur le calcul stochastique est abondante
et dynamique date depuis les travaux pionniers de Wiener, Itô,
Stratonovich, Fisk, et Skorohod[87], [45], [97], [155], [111], [135].Cette
évolution rapide est due au développement technologie des outils
informatiques. [149] ,[61], [95], [106],[145] [82], [31], [49], [146] , Les
livres références sont ceux de [92], [58], [88], [25], [105],
[87], [136], [162], [50], [149], [147], [150]. Le domaine de l'estimation
statistique a subi des avancés de cette théorie [37], [172],
[173], [170], [1], [171], [122]. Les propriétés asymptotiques
telles que la consistance forte ou faible, la normalité asymptotique,
l'efficience asymptotique, etc. pour certains estimateurs de paramètres
drift des équations différentielles de Itô
observés à travers l'intervalle de temps, ont été
étudiés durant les quatre dernières décennies.
3
La méthode de maximum de vraisemblance a
été utilisée pour les équations
différentielles stochastiques linéaires homogènes [154],
[153] et les équations différentielles stochastiques non
linéaires homogènes [115], [153]. Les méthodes
d'estimation Bayésienne, de probabilité maximale, de contraste
minimale, de M - estimation, et de distance minimale sont employées pour
estimer les paramètres des équations différentielles
stochastiques [115], [179]. Pour les équations différentielles
stochastiques non linéaires et non homogènes, les méthodes
de maximum de vraisemblance et Bayésienne [115], [154], [5]. Les
études empiriques pour l'estimation des paramètres de processus
de diffusion sont abondantes [153] , [5], [3],[4],[2], [116],[117].
La deuxième application des intégrales
stochastiques de cette recherche est sur la théorie de filtre
stochastique. L'objectif de filtre stochastique est d'utiliser les outils de
probabilité pour estimer les processus stochastiques non observables qui
apparaissent dans plusieurs domaines tels que la com-munication,target
tracking, et la mathématique de finance [177]. Ces cinq
dernières décennies les recherchent ne cessent de croitre
abondamment dans l'estimation de paramètres des équations
différentielles stochastiques et la théorie de filtre
stochastique [22] , [173],[10], [23],[161], [110], [116], [21] , [31], [177],
[16], [17], [98] , [141].
L'application de calcul stochastique en
économétrie est très importante car les incertitudes
gouvernent le monde économique. On peut dire qu'en économie,
l'incertitude est par tout et pour tout. La modélisation
économétrie classique suppose que les variables et les
paramètres sont non stochastiques (déterministes) et que le terme
d'erreur est aléatoire [46],[168][129], [131], [130], [72],[128], [127],
[80], [130]. Cette modélisation suppose l'absence d'incertitudes dans
les variables et les paramètres ce qui ne reflète pas la
réalité.
En macroéconomie, par exemple, les politiques
économiques prises sur base de cette modélisation sont
erronées et inefficaces. Le calcul stochastique vient corriger en
supposant que les incertitudes sont dans les variables et les
paramètres. En économétrie des séries temporelles,
par exemple, le concept stochastic a progressivement documenté
la théorie économétrique pour mesurer l'incertitude
observée. Avec les modèles GARCH ont utilité les concepts
stochastic volatility Model pour mesurer la volatilité
stochastique [57], [60],[36].
4
Contribution scientifique originale
Cette recherche a comme contribution principale de tracer la
nouvelle direction de la théorie économétrique
basée sur les calculs stochastiques en comblant l'écart qui
existe entre la théorie et la pratique.
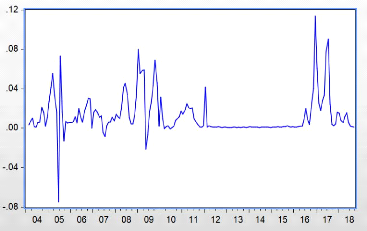
En effet, cette étude a confronté la
théorie de l'économétrie de processus de diffusion aux
données congolaise théorie d'estimation optimale. Cette
étude donne deux résultats : (i) pour la première
application, le résultat de l'estimation montre que l'inflation
observée à Kinshasa est un processus de diffusion
généré par l'équation différentielle
stochastique dont le coefficient de persistance est 54 pour cent(ii) pour la
seconde, les contributions de différents facteurs explicatifs, les
investissements et la main d'oeuvre, du bien - être économique
congolais sont des processus stochastiques.
Hypothèses
Dans ce travail deux hypothèses ont été
retenues à savoir : (i) cette recherche suppose que les variables et les
paramètres sont des processus stochastiques, i.e., les incertitudes
peuvent être observées ou non dans les variables et les
paramètres du modèle économétrique. Pour bien
appliquer les techniques aux données congolaises, deux modèles
séparés ont été faits avec des données
différentes. Dans le premier modèle suppose que la variable est
un processus de diffusion et le second suppose que les paramètres des
sont des processus stochastiques non observables.
Méthodologies utilisées
Pour des raisons de clarté,simplicité et
synthèse, les démonstrations de théorèmes et
propositions ne sont pas présentées ici mais le lecteur
intéressé peut consulter les références
mentionnées. Nous avons passer en revue la théorie des processus
stochastiques en bien maitriser
Limitation du travail
Cette étude présente deux limites principales :
(i) cette recherche fait appel aux théories mathématiques et
statistiques complexes, (ii) les applications
5
sont faites sur les données macroéconomiques
congolaises.
Canevas du travail
Hormis l'introduction et la conclusion, ce travail est
subdivisé en quatre chapitres. Le premier aborde les
préliminaires mathématiques sur les processus stochastiques. Le
deuxième chapitre introduit la théorie des équations
différentielles stochastiques et les intégrales stochastiques. Le
troisième présente les applications des intégrales
stochastiques à la théorie de l'estimation statistique. Et le
dernier chapitre présente deux applications de la théorie
à l'économie congolaise.
6
Chapitre 1
Préliminaires mathématiques
Nous donnons un court résumé des
théorèmes et définitions que nous allons utiliser dans les
autres chapitres. Ce chapitre présente les fondements
mathématiques élémentaires sur les théories de la
mesure et intégration, probabilité, et des processus
stochastiques.
1.1 Eléments de la théorie de la mesure et
intégration
Définition 1.1.1. Soit X un
ensemble abstrait (par exemple R). Une tribu (également
appelée u - algèbre),e sur l'ensemble X est une famille
de sous - ensembles de X telle que :
(i) X E e ;
(ii) VA E e,Ac E e ;
(iii) Si An E e, Vn E N
alors UnENAn E e.
e est donc une classe non - vide de parties de X. e
est appelé la tribu des ensembles mesurables de X.
Nous considérons une fonction particulière qui
permet entre autre de définir les fonctions en escalier : la
fonction indicatrice notée 1A
(également appelée fonction
caractérique),application de X dans R.
Définition 1.1.2. [94] La fonction
indicatrice de A est la fonction
1ç(x) valant 1 si x
E A et 0 sinon .
|
lim infAn =
|
oo
n=0
|
\oo k=n
|
X
Ak = {w E S2,
n>0
|
1Ac
|
< oo}
|
7
On a les propriétés suivantes :
1Ù(x) = 1,
1A,(x) = 1
- 1A(x),
1AnB(x) =
1A(x)1B(x).
Pour une réunion de deux ensembles, on a
1AUB(x) =
1A(x) + 1B(x) -
1AnB(x).
Définition 1.1.3. Soit (S2, T) un
espace mesurable. Une subdivision de S2 est un ensemble finie D d'ensembles
mesurables (D = {A1, ..., An} C T) qui
sont mutuellement disjoint et dont la réunion est S2.
Définition 1.1.4. Soit (S2, T) un
espace mesurable. Une fonction u : T ? R+ est appelée une
mesure (sur l'espace mesurable (S2, T) ou sur la tribu T) si elle
vérifie les conditions suivantes :
(i) u(0) = 0 ;
(ii) u est u - additive : si, pour tout n E N, on a
An E T et si les An sont deux à deux
disjoints (n =6 m An f1 Am =
0), alors on a u(UAn) = Ioon=0
u(An).
Définition 1.1.5. Un espace
mesuré est un triplet (S2, T,u), où S2 est un ensemble, T est une
tribu sur S2 et u est une mesure sur T.
La proposition suivante donne les propriétés d'un
espace mesuré.
Proposition 1.1.0.1. Soit (S2, T, u) un
espace mesuré. Alors u a les propriétés suivantes
(i) (additivité). Si A1, ..., An
E T sont deux à deux disjoints, alors u(UAi) =
Ini=1 u(Ai)
(ii) (Croissance). Si A, B E T avec A C B,
alors u(A) < u(B),
(iii) (Continuité pour des suites croissantes). Si
(An)nEN est une suite croissante d'ensembles
mesurables (Vn E N)
1.1.1 Limite inférieure et supérieure
Soit (S2, A) un espace probabilisable et An
une suite d'événements de A.
Définition 1.1.6. La limite
inférieure de la suite An est l'ensemble des w qui
appartiennent à tous les An sauf peut - être un nombre
fini
Définition 1.1.7. La limite
supérieure de la suite An est l'ensemble des w qui
appartiennent à une infinité de An
|
lim supAn =
|
n
n=0
|
oo
U k=n
|
X
Ak = {w ? S2,
n>0
|
1A~ = 8}
|
8
1.1.2 Espaces vectoriels normés
Définition 1.1.8. Un espace
préhilbertien (réel)(S2, h.i) est un espace
vectoriel (réel) S2 sur lequel est défini un produit scalaire
hi : S2 × S2 ? 18 vérifiant les
propriétés suivantes :
(i) (Positivité)hx, xi > 0 si
x =6 0, ?x ? S2
(ii) (Symmétrie)hx, yi =
hy, xi,?x, y ? S2
(iii) hc1x1 +
c2x2, yi =
c1hx, yi + c2hx, yi pour tous c1,
c2 ? 18,?x, y ? S2.
Ces propriétés ont pour conséquence
immédiate l'inégalité de Cauchy -
Schwarz : |hx, yi| = hx, xi2
hy, yi2 et le produit scalaire induit une norme
sur
X :
k x k= hx, xi2.
Un espace de Hilbert est un espace
pré-hilbertien complet.
Soient (S2, 3 , u) un espace mesuré. Si f
? ,C1p(S2, 3 ), alors
k f k1=k f k= fn
|f|du.
Théorème 1.1.1.
(Théorème de Hölder) Soit 1 = p =
+8. Si f ? I[p(X, 3 , u) et g ? I[q(X, 3 , u),
alors fg ? I[1(X, 3 , u) et
k fg k1=k f kpk g
kq
avec égalité lorsque 1 = p =
+8 si et seulement si u - presque partout sur X, on a
k g kqq |f(x)|p
=k f kpp |g(x)|q.
Théorème 1.1.2.
(Théorème de Minkowski) Soit 1 = p =
+8. Si f, g ? I[p(X, 3 , u), alors f + g ?
I[p(X, 3 , u) et
k f + g kp=k f
kpk g kp
avec égalité lorsque 1 = p =
+8 si et seulement si u - presque partout sur X, on a
k g kp f(x) =k f
kp g(x).
Théorème 1.1.3.
(Théorème de Riesz - Fisher) Soit 1 = p
= +8. Si f, g ? I[p(X, 3 , u).L'espace
(,Cpu(X, 3 , kkp) est un espace de
Banach et la convergence en moyenne entraîne la convergence en
mesure.
9
Définition 1.1.9. Soit f =
PMj=1 ÀjXA3 une fonction
étagée positive sur un ensemble S2 muni d'une tribu r et
u : r -+ [0, +oo] une mesure positive.
L'intégrale de la fonction f relativement à la mesure positive u
est, par définition, la quantité
ZÙ
f(ù)du(ù) =
Àju(Aj) E [0,
+oo].
j=1
XM
Soit S2 un ensemble, r une tribu sur S2,u :
r -+ [0, oo] une mesure positive. On dit alors que la
fonction étagée f est une fonction étagée
intégrable sur (S2, r) relativement à la mesure positive
u. Soient f et g deux fonctions
étagées sur S2(muni de la tribu r) telles que f <
g partout, on a
Z Z
Ù
f(ù)du(ù) < Ù
g(ù)du(ù)
1.1.3 Propriétés de l'intégrale des
fonctions étagées positives
Les propriétés auxquelles se plie
l'intégrale des fonctions étagées positives
(additivité,positivité
homogénéité,monotonie) pourront évidemment
s'étendre à l'intégrale des fonctions mesurables
positives. De fait, le résultat crucial ici est le
théorème de Beppo Levi qui donne le résultat
intéressant pour la convergence croissante des fonctions mesurables
positives.
Théorème 1.1.4.
(Théorème de Beppo Levi)[178] Soient
(fn)n>1 une suite croissante de
fonctions (S2, r) - ([0, oo], B)
mesurables sur un ensemble S2 muni d'une tribu r et f la limite de
la suite fn lorsque n tend vers +oo. Alors f est aussi
(S2, r) - ([0, oo], B) mesurable
et si u : r -+ [0, oo] est une mesure positive, on a
RÙ fdu = limn-00(RÙ
fndu) E [0, +oo] et que si
À > 0, on a
RÙ(Àf)du =
ÀRÙ fdu.
Théorème 1.1.5. (Lemme de
Fatou) Soit S2 un ensemble,r une tribu sur S2, et u :
r -+ [0, oo] une mesure positive. Soit
(fn)n>1 une suite de fonctions
(S2, B mesurable, on a alors
RÙ (lim infn
fn) du < lim infn I R fndu
I .
10
1.1.4 Produit des espaces mesurés
Définition 1.1.10. Soit
(Ù, ô, u) un espace mesuré. La mesure u
est dite ó - finie s'il existe une suite
(An)n E N d'éléments de
ô (que l'on peut supposer croissante) telle que
u(An) < oo pour tout k et que
Ù = U
An.
n
Proposition 1.1.5.1. Soient
(Ù1, ô1, u1) et
(Ù2,ô2, u2) deux espaces
mesu-rés,les mesures u1 et u2 étant toutes les
deux ó - finies. Il existe alors une unique mesure u1
®u2 : ô1 ® ô2 -+ [0,
oo] telle que,pour tout A E ô1,pour tout
B E ô2, on ait ô1 ® ô2(A
x B) = ô1(A) x ô2(B)(toujours avec la
convention 0 x oo = 0).
L'unique mesure positive sur la tribu produit est
appelé ainsi mesure produit de u1 et u2. Plus
généralement, si E désigne un
élément quelconque de ô1 x ô2, les
fonctions x E ó1 -+
u2(Ex), Ex := y E
ó2; (x, y) E E, y E
ó2 -+ u1(Ex),
Ex := y E ó1; (x, y) E E
sont respectivement (Ù1, ô1) - ([0,
oo], B) et (Ù2,ô2) - ([0, oo],
B) mesurables et on a
(u1 ® u2)(E) =
f1 u2(Ex)du1(x)
= f~2
u1(Ey)du2(y).
Théorème 1.1.6.
(Théorème de Fubini - Tonelli)[178] Soient
(Ùj, ôj, uj), j = 1, 2, deux
espaces mesurés, les mesures u1 et u2 étant
ó - finies ô1 ® ô2 la tribu
produit et u1 ® u2 : ô1 ®
ô2 -+ [0, oo] la mesure produit définie
à la proposition précédente. Pour toute fonction
f(Ù1xÙ2, B mesurable, les fonctions
Zx E Ù1 -+ Ù2
f(x, y)du2(y),
Zy E Ù2 -+ Ù1
f(x, y)du1(x)
sont respectivement (Ù1, B) et
(Ù2, B) mesurables et on a :
f(x, y)d[ui
®u2](x, y) = fel [ f~2
f(x, y)du2(y)]
du1(x)
fe1xÙ2
fg.22 [ fs~1 f(x,
y)du1(y)] du2(y)
Théorème 1.1.7.
(Théorème de Fubini)[178] Soit f une
fonction
(Ù1 xÙ2, B) mesurable et
intégrable relativement à la mesure produit u1
®u2.
11
Pour u1 presque partout dans SZ1, la
fonction fx : y E S22 -+ f(x, y) est intégrable
(relativement à la meure u2 ;de plus, la fonction x
-+ fÙ2 f(x,
y)du2(y)
se prolonge en une fonction (SZ1, B)
mesurable, intégrable relativement à la mesure u1 et
l'on a la formule :
fÙ1xÙ2 f(x, y)d[u1
® u2](x, y) = fÙ1 [ fÙ2 f(x,
y)du2(y)] du1(x).
1.1.5 Conditionnement et indépendance de
probabilité
[56] Si A est un événement de
probabilité P(A) > 0, la mesure de probabilité
conditionnelle, A étant donné, associe à tout
événement B la probabilité
P(B | A) := P(BnA)
P (A) .
La formule du conditionnement en chaine s'exprime en disant
que si n > 2 et A1, A2, ...,
An est une suite den événement tels que
P(A1, A2, ..., An) > 0, on a
l'identité :
P(A1, A2, ..., An) =
P(An | A1, ..., An_1)P(An_1 |
A1, ..., A2)...P(A2 |
A1)P(A1).
On dit qu'une suite (An)
d'événement est un système complet si
(i) i =6 j = AZ n Aj = Ø (les
événements sont deux à deux incompatibles)
(ii) P(En An) = En P(An) =
1 (presque sûrement l'un des événements
An se réalise).
Deux événements A et B sont
indépendants si l'on a P(AnB) = P(A)P(B). Soit
(Xn) une suite de variables (mutuellement)
indépendantes si pour toute suite finie (i1 < ... <
ir) d'entiers telle que r > 2 et toute
suite (B1, ..., Br) d'ensembles boréliens,
on a l'identité
P{XZ1 E
B1...XZr E Br} = P{XZ1 E
B1}....P{XZr E Br}.
1.2 Espérance conditionnelle
Dans ce point un rappel sur les règles de calcul des
espérances conditionnelles, auquel nous nous sommes constamment
reportés pour le traitement de la théorie des martingales.
Soient X et Y deux variables
aléatoires avec Y réelle et X prenant ses
valeurs dans un ensemble fini ou dénombrable.
12
Définition 1.2.1. Soit X une
variable aléatoire à valeurs dans un ensemble E fini ou
dénombrable dont les points sont notés {x1, x2,
..., xn, ...}. Soit Y une autre variable aléatoire
réelle, définie sur le même espace de probabilité
(Ù, F,P). Si P(X = xj) > 0, l'espérance
conditionnelle de Y sachant {X = xj} est le nombre E(Y |X = xj) =
EQ3(Y ),espérance de Y pour Qj, où Qj est la
probabilité sur (Q, F) donnée par Q(A) = P(A|X = xj),
pourvu que EQ3(|Y |) < oo (i.e.,Y est Qj -
intégrable).
Lorsque Y est elle-même une variable
aléatoire discrète prenant ses valeurs dans {y1,
y2, ...} pour Y,on obtient le résultat
suivant.
Théorème 1.2.1. Dans la
situation précédente, pour tout j tel que
P(X = xj) > 0 on a E(Y |X = xj) = Ek1 ykP(Y =
yk|X = xj) pourvu que la série ci - dessus soit absolument
convergente.
Définition 1.2.2. Soit X une
variable aléatoire à valeurs dans un espace E fini ou
dénombrable, et Y une variable aléatoire réelle
définie sur le même espace de probabilité.
L'espérance conditionnelle deY sachant X est
E(Y |X) = f(X) où f est donnée par la
définition précédente ()et pourvu que cette fonction f
soit bien définie.
Si par exemple X est une application de S2 dans
Rn, la tribu engendrée par X est
o-(X) =
X-1(Bn) = {F E SZ :
X-1(93) = F pour un 93 E
Bn}.
Définition 1.2.3. Soit Y E
L2(S), F, P). L'espérance conditionnelle de
Y sachant X est l'unique élément Y de L2(SZ,
cr(X), P) qui vérifie
E(YàZ) = E(Y Z) pour tout Z E
L2(SZ, u(X), P). On note cette espérance
conditionnelle par E(Y |X).
Définition 1.2.4. Soit Y E
L2(SZ, F, P) et G une sous-tribu de
F. L'espérance conditionnelle deY sachant G est
l'unique élément E(Y |G) de L2(SZ,
G, P) qui vérifie E(Y Z) = E(E(Y |G)Z) pour tout Z E
L2(SZ, F, P).
Théorème 1.2.2. [90] Soit Y E
L2(Q, F, P) et G une sous-tribu de
F.
(i) Si Y > 0 alors E(Y |G) > 0,
(ii) Si G = u(X) pour une variable aléatoire
X à valeurs dans Rn,il existe une fonction
borélienne f sur R telle que E(Y |G) = f(X),
(iii) E(E(Y |G)) = E(Y ),
(iv) L'application Y -+ E(Y |G) est une application
linéaire.
Théorème 1.2.3. Soit Y une
variable aléatoire positive ou intégrable sur (S), F, P)
et G une sous - tribu. Alors E(Y |G) = Y si et seulement si Y
est G-mesurable.
13
Théorème 1.2.4. Soit Y E
L1(Ù, F, P) et si X est
une variable aléatoire indépendante de Y , on a E(Y
|X) = E{Y }.
Théorème 1.2.5. Soit X, Y
des variables aléatoires réelles sur (Ù,
F, P) et G une sous - tribu de F par
rapport à laquelle X est mesurable. On a alors E(XY |G) =
XE(Y |G, dans chacun de deux cas suivants:
(a) les v.a. X, Y et XY sont intégrables,
(b) les v.a. X et Y sont positives.
Théorème 1.2.6. [90] Soit
(Yn)n=1 une suite de variables
aléatoires réelles sur (Ù, F, P)
et G une sous - tribu.
(i) (Convergence monotone.)Si les Yn sont
positives et croissent p.s. vers une limite Y ,alors
limn?8 E(YnjG) =
E(Y |G) p.s. ;
(ii) (Lemme de Fatou.)Si les Yn sont positives,
on a E(lim infn?8 Yn|G) <
lim inf E(Yn|G) p.s.;
(iii) (Théorème de convergence
dominée de Lebesgue.) Si les Yn convergent p.s. vers une
limite Y , et si on a Yn| = Z pour tout n et pour une certaine v.a.
Z E
L1(Ù,F,P),alors
|
lim
n?8
|
E(Yn|G) = E(Y |G)
p.s..
|
1.2.1 Variables aléatoires
Un processus stochastique est un ensemble des variables
aléatoires (Xi, t E Ø) dans un espace de
probabilité (Ù, t9, P). Dans le sens
général, les processus stochastiques sont des fonctions
X(t, w) dépendant du temps. Pour une
éventualité w fixé,X(t, w) sont
des variables aléatoires sur (Ù, t9, P) [135]
Le processus stochastique X est dit être
adapté si Xt E Øi pour tout
t,où Øt représente
Interprétation du paramètre t comme
index de temps introduit un aspect dynamique : pour modéliser le fait
que l'incertitude des événements de Ù devient de moins en
moins incertaine lorsque le temps s'écoule, i.e. on possède de
plus en plus d'information, on introduit la notion de filtration.
1.2.2 Modes de convergence
On rappelle succinctement les définitions des
différents modes de convergence des variables aléatoires. Ces
éléments sont tirés de [94]. Pour une ana-
14
lyse plus approfondie le lecteur intéressé peut
consulté [29],[30], [14]. La suite de variables aléatoires
Xn converge presque surement (p.s.) vers la
variable aléatoire X, si la convergence a lieu sauf peut -
être pour un ensemble de mesure négligeable.
La suite de variables aléatoires Xn
converge dans Lp vers la variable aléatoire X si
Proposition 1.2.6.1. La suite de
variables aléatoires réelles Xn converge en
probabilité si et seulement si pour tout r > 0,
supE(|Xn+k -
Xn|p) P-? 0
quand n ? 8.
La suite de variables aléatoires réelles
Xn converge en probabilité si et seulement si pour tout r
> 0,
P-?
IE(sup|Xn+k -
Xn| > r) 0 quand n ? 8.
Définition 1.2.5. Une suite de
variables aléatoires réelles Xn est
uniformément intégrable si
sup \ ( Ixn
|Xn /~ I dIE ? 0 quand n ? 8
|>0
autrement dit si pour tout e > 0, il existe a tel
que pour tout n,
f
|Xn|dIE |Xn|>a <
e.
1
e JC1<0 |y - x| <
c2|yi - xi|Pt,x(t + e, dy) =
c2e f Pt,x(t + e, dy)
y-x|>c
flimkXn -
Xkp = lim( |Xn -
X|pdIE)1/p
= 0.
La suite de mesure positives bornées
un converge faiblement vers u, si pour toute
fonction continue sur R qui tend vers zéro à l'infini, on a
f f
lim fdun = du.
La suite de mesures positives bornées
un converge étroitement vers u, si pour
toute fonction continue bornée de R
f f
lim fdun = du.
15
La suite de mesures positives bornées
un converge étroitement vers u si et
seulement si un converge faiblement vers u et
si
limun(R) = u(R).
La suite de variables aléatoires Xn
converge en probabilité vers la variable aléatoire X
si
P(|Xn - X| = 6) ?
0,?E > .0
La suite de variables aléatoires Xn
converge en loi vers la variable aléatoire X si les mesures
Px convergent étroitement vers la mesure
Px.
Les modes de convergences sont liés entre eux : Certains
en impliquent d'autres.
Proposition 1.2.6.2. La convergence dans Lp
entraîne la convergence en probabilité si la suite Xn
converge vers X dans Lp, alors Xn converge vers X en
probabilité
Xn -? X Xn -?
X
Proposition 1.2.6.3. La convergence
presque sûrement entraîne la convergence en
probabilité
p.s.
Xn --? X Xn-?
X
P
Proposition 1.2.6.4. La convergence en
probabilité entraîne la convergence en loi
Xn -? X Xn -?
X
Soit Xn une suite de variables
aléatoires réelles.
Proposition 1.2.6.5. La suite de
variables aléatoires réelles Xn converge en
probabilité si et seulement si pour tout r > 0,
supP(|Xn+k - Xn|
> r) ? 0 quand n ? 8.
Proposition 1.2.6.6. La suite de
variables aléatoires réelles Xn converge en
probabilité si et seulement si pour tout r > 0,
supE(|Xn+k -
Xn|p) ? 0 quand n ?
8.
La suite de variables aléatoires réelles
Xn converge en probabilité si et seulement si pour tout r
> 0,
P(sup|Xn+k -
Xn| > r) P-? 0 quand n
? 8.
16
1.3 Processus stochastiques
Dans cette section nous donnons une brève
présentation sur la notion des processus stochastiques tels que les
chaines de Markov, Martingales, les mouvements browniens.
1.3.1 Processus de Markov
Soit (S2, T, P) un espace de probabilité
et (E, B) l'espace des états, B désigne la
tribu des boréliens de E. Un processus Xt est un
processus de Markov si pour tout u et t > 0 et pour tout T
E B, on a
P(Xt+u E T|Xs, s < t) = P(Xt+u E
T|Xt)
Ce qui signifie que le processus ne dépend que du
dernier instant et non de tout son histoire.
La probabilité de transition pour passer de
l'état x au temps s à un étant
appartenant à T à l'instant t est notée par s
< t
Ps,t(X, T = p(s, x; t, T) = P(Xt E
T|Xt = x).
La fonction T -+ T) = P(Xt E T est une
probabilité sur T . La probabilité de transition vérifie
l'équation de Chapman - Kolmogorov qui s'écrit sous les
formées suivantes. Soit s < u < t tel que
Xu = y, on a
ZPs,t(X, T) = Ps,u(x, dy)Pu,t(y,
T).
et dans le cas d'un espace E dénombrable
XPs,t(X, z) = Ps,u(x, y)Pu,t(y, z).
yEE
Le processus Xt est un processus de Markov
homogène si pour tout sett de T, la transition
p(s, x;t, B) = p(x; ô, B)
ne dépend que de ô = t - s.
17
Processus de diffusion
Définition 1.3.1. [111] Un
processus de Markov Xt de réels dans Rn, a
< t < b, est appelé un processus de diffusion si ses
probabilités de transition {Ps,x(t, .)} satisfait les trois conditions
suivantes pour tout t E [a, b], x E Rn, et c >
0 ;
(1) limå?0 1 å
fy-x|=c Pt,x(t + e, dy) = 0
(2) limå?0 E fy-x|<c(yi
- xi)Pt,x(t + e, dy) = pi(t, x) existe.
(3) limå?0 E fy-x|<c(yi
- xi)(yj - xj)Pt,x(t + e, dy) = Qi j(t x) existe .
La condition (1) implique que le processus stochastique Xt
ne peut pas avoir des sauts instantanés ; De plus on observe que
pour tout c2 > c1 > 0 qui tend à 0
quand e -+ 0 dans l'équation (1). Il s'en suit que la limite
dans l'équation (2) est indépendante de la constante c.
De même, la limite dans l'équation (3) est aussi
indépendante de la constante c. Ainsi pi(t, x) et
Qi,j sont respectivement donnés( par
pi(t, x) = limå?0 É fRn(yi - xi)Pt,x(t + e,
dy) Qi,j(t, x) = limå?0 E fy-x|<c(yi -
xi)(yj - xj)Pt,x(t + e,dy)
Définition 1.3.2. [111] Le vecteur
p(t, x) = (p1(t, x), p2(t, x), ..., pn(t, x)) et
le paramètre Q(t, x) = [Qi,j(t, x)]i,j sont respectivement
appelés les coefficients dérive (drift) et volatilité
(diffusion) du processus de diffusion Xt.
Il est important de note qu'une classe spéciale de
processus de diffusion donnée par la solution des équations
différentielles stochastiques.
Processus de Lévy
Définition 1.3.3. [94] Un
processus Xt adapté à la filtration Tt
est un processus de Lévy si X0 = 0, si les
trajectoires de Xt sont continues à droite et avec des limites à
gauche (càdlàg) et tel que pour tout s, t > 0 la variable
Xt+s - Xt est indépendante de la tribu Tt
et de même loi que Xs.
Théorème 1.3.1. [94] Soit
Xt un processus de Lévy adapté à la filtration Tt
et de la loi ut.
(1) Les lois ut forment un sous - groupe de
convolution
ut * us = ut+s
(2) Les processus Xt satisfait la propriété de
Markov pour le noyau ZPt(x, A) = 1A(x + y)ut(dy)
18
Théorème 1.3.2.
[94](Lévy - Khintchine) La fonction caractéristique
d'un processus de Lévy Xt est de la forme
E(eièXt) =
e-tø(è)
où ø(è) est l'exposant
caractéristique de la loi indéfiniment divisible de Xt qui
s'écrit
(è) = iaè +1
2u2è2 + f(1 -
eièx +
ièx1(|x|<1))F(dx)
La quantité a est réelle, a E
1[8,ó > 0, et F est une mesure concentrée sur ]0,
+oo[ telle que
Le triplet (a, ó, F) est appelé
triplet de Lévy - Khintchine associé au processus
Xt.
Processus du second ordre [94],
Définition 1.3.4. Un processus Xt
est un processus du second ordre si E|Xt|2
< oo. Une série chronologique est un
processus du second ordre à temps discret.
Matrice stochastique
Une matrice carrée M dont ses composantes sont
toutes strictement positives est appelée matrice positive. Aussi une
matrice M des éléments réels est dite non
négative (notée M > 0) quand toutes ses
éléments sont non négatifs : (aij) > 0,
Vi = 1, 2, ..., N j = 1, 2, ...,
L. Une matrice M de N x N est une matrice
stochastique si ses éléments sont des nombres réels
satisfaisant les conditions suivantes [9] :
1 0 < (mij) < 1, Vi, j = 1,
2, ..., N
2 chaque colonne de M est une distribution de
probabilité,c'est - à - dire,
INi=1(mij) = 1 V
Les éléments de la matrice stochastique sont des
probabilités, des nombres réels dans l'intervalle fermé
[0, 1]. Conséquemment, les matrices stochastiques sont des
matrices non négatives. La première conséquence de ces
conditions est que toutes les puissances successives de Mp sont aussi
des matrices stochastiques :
|
N i=1
|
(mij)p =
|
XN i=1
|
(mij)p-1 =
|
N i=1
|
(mij)2 = ... =
|
N i=1
|
N i=1
|
(mik)(mkj) = 1
|
19
La seconde conséquence, lorsque on manipule une
distribution de probabilité d'une matrice stochastique, cette
dernière produit une autre une distribution de probabilité.
1.3.2 Chaînes de Markov
La théorie de chaines de Markov est couramment
utilisée dans plusieurs domaines à cause de sa rigueur
scientifique et sa simplicité dans la modélisation du monde
réel. Dans cette étude nous allons parler, de façon
brève, de chaines de Markov car ces dernières sont des processus
stochastiques particuliers.
Chaines de Markov à temps discret.
Supposons Pij est une probabilité fixée
indépendante du temps telle que
P(Xn+1 = i |
Xn = j, Xn-1 =
in-1, ··· , X0 =
i0) = Pij, n = 0
oïi,12 i, j, i0,
i1, · · · , in-1 ? espace d'état
.
Théorème 1.3.3.
(Propriétés de Markov forte)[Loustau,p.] Soit
(Xn)n>0 une chaine de Markov (ii,
P). Alors, quelque soit x ? E, conditionnellement à
{XT = x} (l{T <
8},(XT+p)p>0 est une chaine de
Markov (Sx, P) indépendante de
(X0, ..., XT). On peut s'écrire, quelque soit
A ? TT :
P(A
n XT+1 = x1, ..., XT+p =
xp|XT = x, T < 8) = P(A|XT =
x,T < 8)Px(X1 = x1, ...,
Xp = x Classification des
états. Les états d'une chaîne de Markov se
repar-
tissent en classes que l'on définit à partir de la
matrice de transition
Définition 1.3.5. On dit que
l'état j est accessible à partir de l'état i, on est
conséquent de l'état i, s'il existe un entier n > 0
tel que p(n)
i,j > 0. On
écrit : i j.
Proposition 1.3.3.1. (i) La relation
d'accessibilité entre états est réflexive et
transitive.
20
(ii) Soient i, j deux états ; les deux
propriétés suivantes sont équivalentes.
(a) l'état j est accessible à partir de
l'état i, soit i j.
(b) le processus, portant de i, passe par j avec une
probabilité strictement positive.
Définition 1.3.6. On dit deux
états i et j communiquent et on l'écrit i ,
si on a à la fois i j etj
i.
Proposition 1.3.3.2. La relation de
communication entre états est une relations d'équivalence. Pour
tout i, on a p(0)
i,i = 1, tout état communique avec
lui - même.
Un état est appelé état de
retour, s'il existe n > 1 tel que p(n)
i,i = 0. Il existe des états i tel
que pour tout n > 1 (donc 0 exclu ) on dit
p(n)
i,i = 0. De tels états sont
p(n)
i,i = 0appelés états de non - retour.
Pour la relation de communication l'ensemble E des états se
partitionne en classes d'équivalence, disjointes et non vides, dites
classes indécomposables. Certaines classes peuvent ne comporter qu'un
seul élément ; ce sont les singleton comme exemples, mentionnons
:
* un état de non - retour i
:p(0)i,i = 1, p(n)
i,i = 0 pour n > 1;
* un état absorbant i
:p(0)i,i = 1, p(n)
i,i = 1 pour n > 1.
Définition 1.3.7. S'il n'y a
qu'une seule classe pour la relation de communication, autrement dit, si tous
les états communiquent entre eux, la chaîne est dite
irréductible.
Définition 1.3.8. On dit que
l'état récurrent ou transient si pi,i < 1.
Théorème 1.3.4. (Critère de
récurrence) Un état j est récurrent ou transient selon
que
X
n>0
X
n>0
pi,i = +8 (n)
ou que
pi,i < +8 (n)
Proposition 1.3.4.1. On a les
identités
1
Pj,j(s) = 1 - Fj,j(s),
Pi,j(s) = Fi,j(s) (i =6
j),
que l'on peut réunir en une seule formule
Pj,j(s) = äi,j +
Fi,j(s)Fj,j(s)
21
Proposition 1.3.4.2.
|
X X
P(n)
j,j (s) = Si,j + fi,j
n0 n0
|
(s)f(n)
j,j (s)
|
X
n>0
1
pi,i =
(n)
1 - fj,j
ou que
X
n~0
(Z = ) J,7 (Z
~ j
p )
1 - fj,j
1.3.3 Temps d'arrêt
Une variable aléatoire T : (S2, 3 ,
P) -+ N* un temps pour la filtration 3n si
pour tout entier n, l'événement (T =
n) E 3n.
Proposition 1.3.4.3. Si S et T sont deux
temps d'arrêt alors sup(S, T) = S V T et
inf(S, T) = S A T sont des temps d'arrêt. Si
(Sn) est une suite de temps d'arrêt alors
sup(Sn) est un temps d'arrêt.
Proposition 1.3.4.4. [94] Si
(Xn) est une sous-martingale(respectivement
martingale, surmartingale), T un temps d'arrêt alors, la suite
(XTAn) est une sou -
martingale(respectivement martingales, surmartingale).
On dit que le processus X = (X(t) :
t > 0) est adapté au processus Z =
(y(t) : t > 0) si pour tout t > 0 il
est existe une fonction gt = (.) telle que
X(t) = gt(Z(t) : 0 < S
< t). On dit que Mn : n > 0)
est une martingale adaptée à (Z(t) : t
> 0) si
(i) E | Mn |< oo pour
n > 0,
(ii) (Mn : n > 0) est
adaptée à Zn : n > 0),
(iii) E[Mn+1 | Z0, ...,
Zn] = Mn presque surement pour n
> 0.
On dit que Mn : n > 0) est une
sous-martingale (surmartingale) adaptée à (Z(t)
: t > 0) si
(i) E | Mn |< oo pour
n > 0,
(ii) (Mn : n > 0) est
adaptée à Zn : n > 0),
(iii) E[Mn+1 | Z0, ...,
Zn] > Mn (E[Mn+1 |
Z0, ..., Zn] < Mn) presque
surement pour n > 0.
Proposition 1.3.4.5. Soit M =
Mn : n > 0) une martingale adaptée
à Zn : n > 0) et On :
n > 0) est une suite de variables aléatoires
bornées qui est adaptée à Zn : n
> 0). Alors Mn - I Oj-1 A Mj est une
martingale adaptée
22
à Zn : n > 0) où OMj = Mj -
Mj-1 pour j > 1 et E[(Mj -
M0)2] =
PE[02j-1(OMj)2].
Définition 1.3.9. Un processus
stochastique X(t) : a < t < b est appelé continu
ï612 droite si toutes les trajectoires
d'échantillon sont des fonctions continues à droite sur [a,
b].
Définition 1.3.10. Une martingale M =
(Mt, IFt), t E R+ est dite carrée -
intégrable
si
sup E(M2t ) < oo.
|{z}
t
Nous donnons le théorème de
d'inégalité de Doob d'une sous - martingale donne les valeurs
maximales attentes par une sous-martingale.
Théorème 1.3.5.
(Inégalité de Doob) Soit X(t), a < t < b une
sous - mar-
|
tingale continue à droite. Alors VA > 0, P[
sup
|{z}
a<t<b
|
X(t) > A] <
1ë[X(b)+]
où
|
X(b)+ est la partie positive de
X(b),c'est- à-dire,X(b)+ = max(X(b), 0). En
particulier, si X(t) est une martingale continue à droite, alors pour
tout
|
P[ sup
|{z}
a<t<b
|
X(t) > A] =
1ë[X(b)+]
|
Le théorème d'arrêt de Doob montre que
l'inégalité des sous - martingales est conservée par
passage à un temps d'arrêt borné.
Théorème 1.3.6.
[94](Théorème d'arrêt de Doob) Soi Xn
une surmartingale (resp. martingale,sous - martingale), S et T deux temps
d'arrêt bornés (S < T < k). Les variables XS et XT sont dans
L1 et on a
E(XT FS) = XS, (respectivement =, <)
1.3.4 Martingales à état
indépendant
Nous considérons la classe des processus à
état dépendant S de la forme Mt = f(Xt)
où Xt : t > 0) est une chaine de Markov.
Proposition 1.3.6.1. Supposons que f est une
fonction telle que
EX f(Xt) < oo pour t > 0 et x E S.
(i) Si f = P f, alors (f(Xt : t > 0)) est une martingale
adapté à (Xt : t > 0),
(ii)
23
Si f = Pf, alors (f(Xt :
t = 0)) est une surmartingale adapté à (Xt
: t = 0),
(iii) Si f = Pf, alors (f(Xt
: t = 0)) est une sous-martingale adapté à
(Xt : t = 0),
Théorème 1.3.7. Soit
(Mt : t = 0) une sous-martingale adapté
à (Zt : t = 0). Alors pour X >
0,
|
P[max s.. {z }
0<k<t
|
Mk > X] = EM+
X .
t
|
La propriété de sous-martingale est
préservée sous applications convexes.
Proposition 1.3.7.1. Soit ç :
R ? R convexe. Si Mt : t =
0) est une martingale adaptée à (Zn
: n = 0) pour laquelle
E|ç(Mt)| < 8 pour n = 0,
alors (ç(Mn) : n = 0) est
une sous-martingale adaptée à (Zn :
n = 0). Si ç est à la fois convexe et croissante et
Mt : t = 0) est une sous-martingale pour laquelle
|ç(Mt)|8 pour n = 0, alors
(Mt : t = 0) est une sous-martingale adaptée
à (Mt : t = 0).
Théorème 1.3.8.
(Théorème de convergence des martingales)
(i) Soit Mt : t = 0) est une
sous-martingale adaptée à (Zt : t =
0). Si E|Mt| < 8, alors il existe une
variable aléatoire à valeur finie M8 telle
que Mt ? M8 presque surement quand t tend vers
8.
(ii) Soit Mt : t = 0) est une
sous-martingale non négative adaptée à (Zt :
t = 0), alors il existe une variable aléatoire à
valeur finie M8 telle que Mt ? M8
presque surement quand t tend vers 8.
Quand (Mt : t = 0) est une
martingale,(ii) est appelée le théorème de
convergence de martinga
1.3.5 Mouvement brownien
Le botaniste Robert Brown en 1827 pour décrire le
mouvement irrégulier de particules de pollen dans un fluide. Le cadre
d'application du mouvement brownien a largement dépassé
l'étude des particules microscopiques pour être utilise en finance
dans la modélisation des prix d'actions, historiquement depuis Bachelier
en 1900.
Définition 1.3.11. [150](Mouvement
brownien standard) Un mouvement brow-
nien standard vectoriel (d-dimensionnel) sur T = [0,
T] ou R+ est un proces-
( ~
sus continu à valeurs dans
Rd, (Wt)tET = W t 1 ,
..., W t d tET tel que
(i)
24
W0 = 0
(ii) Pour tous 0 =< t dans T, l'accroissement
Wt - Ws est indépendant de u(Wu, u =
s) et suit une gaussienne centrée de matrice de variance -
covariance (t - s)I - d où Id est la matrice
d'identité d × d.
Définition 1.3.12. (Mouvement
brownien standard,[Pham,p.6]) Un mouvement brownien standard vectoriel
(d-dimensionnel) sur T = [0, T] ou R+ par
rapport à une filtration F = (ft)tET
est un processus continu F-adapté à va-
( )
leurs dans Rd, (Wt)tET
= W t 1 , ..., W t d tET tel que
(i) W0 = 0
(ii) Pour tous 0 =< t dans T, à
l'accroissement Wt -Ws est indépendant de
u(Wu, u = s) et suit une gaussienne centrée de
matrice de variance - covariance (t - s)I - d où Id
est la matrice d'identité d × d.
Définition 1.3.13. [94](Mouvement
brownien fractionnaire) Soit Xt un processus. On dit que la loi de Xt est
autosimilaire de facteur H si ?a > 0>, la loi de Xat
est la même que la loi de aHXt. On suppose que Xt est un
processus gaussien à accroissement stationnaires (Xt - Xs
a même loi que Xt-s).Si H ? ]0, 1[, on dit que Xt
est un mouvement brownien fractionnaire d'exposant H(appelé
paramètre de Hurst). Dans le cas où H = 1/2, Xt est appelé
le mouvement brownien fractionnaire standard.
1.3.6 Quelques modification du mouvement brownien
Les éléments développés ici
peuvent être trouvés dans[94]. Les modification introduites sont
toutes des processus de Markov dont les trajectoires sont presque
sûrement continues.
Définition 1.3.14. (Mouvement
brownien réfléchi) Soit {X(t) : t 0} un
mouvement brownien. Le processus {Y (t) : t 0} où
{Y (t) :=| X(t) |, t 0} est appelé
mouvement brownien réfléchi( à l'origine).
q2t
Proposition 1.3.8.1. On a : E[Y(t)] = ð
et VarY (t) = (1 - 2 ðt).
Définition 1.3.15. (Le mouvement
brownien absorbé) Dans la définition du mouvement brownien
donnée c -dessus, on remplace la condition (1) X(0) par (1'
X(0) = x > 0. On obtient le mouvement brownien commerce en x.
Désignons par T le premier instant où ce mouvement brownien
atteint la valeur 0 et introduisons le processus {Z(t) : t 0}
défini par
Z(t) := {X(t), sit 6 T; 0, sit> T. (1.1)
25
Ce processus est appelé mouvement brownien
absorbé ( à l'origine).
Définition 1.3.16. (Le mouvement
brownien à dérive) Soient {X(t) : t 0} un
mouvement brownien et , un nombre réel. Le processus {Y (t) : t
0}, où Y (t) := X(t) + ,it, est appelé mouvement
brownien à dérive; la constante ,t est le paramètre de
dérivé.
Si ,u = 0, le processus n'est plus symétrique
et le principe de réflexion ne s'applique plus pour le calcul de la loi
du maximum.
Proposition 1.3.8.2. Le mouvement
brownien avec dérive a les propriétés suivantes :
(a) Y (t) = 0;
(b) le processus est à accroissement
indépendants et stationnaire;
(c) pour toutt > 0, la variable aléatoire Y (t)
suit la loi normale de paramètre (sit, /t).
Définition 1.3.17. (Le mouvement
brownien géométrique) Soit {X(t) : t 0} un
mouvement brownien. Le processus {Y (t) : t 0}, où Y
(t) := exp(X(t)), est appelé mouvement brownien
géométrique.
Lorsque le mouvement brownien sous - adjacent est à
dériver, à même s'il est de la forme X(t) =
t9î(t) + ,it où (t) : t 0} est le mouvement brownien
standard.
Proposition 1.3.8.3. Soient
{î(t) : t 0} le mouvement brownien standard et
{Y (t) : t 0} le processus géométrique
défini par:
Y (t) =
e(uî(t)+ut). Alors
E[Y (t)] = et(u+ u2 2
)
V arY (t) = e2t(u+u2
2 )(etu2 - 1)
Définition 1.3.18. (Processus
d'Ornstein - Uhlenbeck) Soient {X(t) : t 0} un mouvement
brownien et a un nombre strictement positif. Le processus
{Y (t) : t 0}, ou Y (t) := e- át
2 (eát), est appelé processus
d'Ornstein -
Uhlrnbeck.
Proposition 1.3.8.4. Pour tout t 0, on a E[Y
(t)] = 0 et pour 0 < s < t < +00, on a :
á(t-s)
Cov(Y (s), Y (t)) = e- 2
.
Théorème 1.3.9. Le mouvement
brownien standard {X(t) : t 0} est une
martingale par rapport à la famille {F; t
0} où {F; t 0} est la
tribu
engendrée par les variables Xs (0 s t).
26
1.3.7 Martingales et Semimartingales
La notion fondamentale dans l'analyse des processus markoviens
est celle de martingale. Les martingales forment aussi la base de la
théorie moderne d'intégration stochastique. Elles jouent un
rôle important dans l'analyse des chaines markoviennes et des processus
markoviens.
Définition 1.3.19. (Martingale) Un
processus (Xt)t E T adapté est appelé surmartingale si
E[Xt] < oo pour tout t E T et E[Xt | 3s] <
Xs,p.s. pour tout 0 < s < t,s, t E T. X est une
sous-martingale si -X est une surmartingale. On dit que X est une martingale si
elle est à la fois une surmartingale et une sous - martingale.
Un exemple important de martingale est le mouvement brownien.
Théorème 1.3.10. (Convergence des
martingales)
(1) Soit X = (Xt)t>0 est une surmartingale
cád-lág bornée dans £1 ( en particulier si elle est
positive). Alors Xt converge p.s. quand t -+ +oo.
(2) Soit X = (Xt)t>0 est une martingale
cád-lág dans £1 (en particulier si elle est
positive). Alors Xt est uniformément intégrable si et seulement
si Xt converge p.s. et dans £1 quand t -+ +oo vers une variable
aléatoire X+oo. Dans ce cas,X+oo ferme X à droite, i.e. Xt =
E[X+oo | 3t] pour tout t > 0.
Théorème 1.3.11.
(Théorème d'arrêt des martingales) Soit M
=(Mt)tET une martingale càd-làg et u, r deux temps
d'arrêt bornés à valeurs dans T tel que u < r.
Alors
E[Mô | 3ó] =
Mó,p.s.
Corollaire 1.3.11.1. Soit X = (Xt)tET un
processus càd-làg adapté.
(1) X est une martingale si et seulement si pour tout
temps d'arrêt r borné à valeurs dans T, on a
Xô E £1 et
(2) Si X est une martingale et r est un temps
d'arrêt alors le processus arrêt Xô est une
martingale.
Théorème 1.3.12.
[150](Inégalité de Doob) Soit X = (Xt)tET une
sous-martingale positive ou une martingale càd-làg. Alors pour
tout temps d'arrêt
|
r à valeur dans T,on a :
~
P sup
|{z}
0=t=ô
|
~= E | Xô |
| Xt | = ë ë ,?ë >
0
|
|
~
E sup
|{z}
0=t=ô
|
~ Xt | =(pp )p
E[ | Xô
|pi,?A> 0 - 1
|
Définition 1.3.20. (Martingale
locale) Soit X un processus càd-làg adapté. On dit que X
est une martingale locale s'il existe une suite de temps d'arrêt
|
(rn)n=1 telle que lim
|{z}
n?+8
|
rn = +8 p.s. et le processus
arrête Xôn est une
|
martingale pour tout n.
Proposition 1.3.12.1. Soit M =
(Mt)t?T une martingale locale. Supposons
|
~que E sup |{z}
0=t=ô
|
~| Ms | < +8, ?t
? T. Alors M est une martingale.
|
Proposition 1.3.12.2. Soit M une
martingale locale positive telle que M0 ? £1.
Alors M est une surmartingale.
Proposition 1.3.12.3. Soit M =
(Mt)t?T une martingale locale continue M0 = 0. Alors si M est
à variation finie,M est une indistinguable de 0.
Théorème 1.3.13. (Variation
quadratique)
(1) Soient M = (Mt)t?T et N = (Nt)t?T
deux martingales locales dont l'une des deux est localement bornée (par
exemple continue). Alors il existe un unique processus prévisible
à variation finie, noté hM, Ni, nul en 0, tel
que MN - hM, Ni soit une martingale locale.Cette martingale
locale est continue si M et N le sont. De plus, pour tout t ? T,si 0 =
tn0 = tn1 = ...
= tnkn = t est subdivision de [0, t] de pas
tendant vers 0, on a :
|
hM, Nit = lim
n?+8
|
Xkn i=k
|
(Mtni -
Mtni-1)(Ntni - Ntni-1),
|
27
au sens de la convergence en probabilité. Le
processus hM, Ni est appelé Crochet (Oblique) de M et
N On dira de plus que M et N sont orthogonales si hM, Nh= 0
ce qui signifie que le produit MN est une martingale locale.
(2) Lorsque M = N, le processus hM, Ni,
noté parfois hMi et appelé la variation
quadratique de M ou le processus croissant de M, est croissant. De plus, on a
la relation de polarisation
hM, Ni =
12(hM + N, M + Ni - hM,
Mi - hN, Ni).
L'inégalité suivante est utile pour
définir l'intégrale stochastique.
Proposition 1.3.13.1.
(Inégalité de Kunita - Watanabe) Soient M et N deux
martingales locales continues et á, 3 deux processus mesurables sur
T×I muni de la tribu produit /3(T) ? F. Alors,
on a pour tout t ? T :
|
f t ( f t )
0hásih/3sid
| hM, Nis = 0 á2
sdhM, Nis ment.
|
2 ( f t
1 )
0 /32 sdhM,
Nis
|
1
2
|
, presque sûre-
|
L'inégalité fondamentale suivante pour les
martingales (locales) sera très utile lorsqu'on s'intéressera aux
martingales locales définies par des intégrales stochastiques
pour lesquelles on arrive souvent en pratique à calculer la variation
quadratique.
Théorème 1.3.14.
[150](Inégalité de Burkholder - Davis - Gundy) Pour
tout p > 0, il existe des constantes positives cp et Cp
telles que pour toute martingale locale continue M = (Mt)tET et
tout temps d'arrêt r à valeurs dans T,on
a
[ ]
p
cpE hMi ô 2
=E[sup
|{z}
0<t<ô
[ ]
p
| Mt |]p = CpE hMi
ô 2
28
Proposition 1.3.14.1. (Martingale de
carré intégrable) Soit M = (Mt)t?T une martingale locale
continue. Alors M est une martingale de carré intégrable si et
seulement si E[hMit] < +8 pour tout t ?
T. Dans ce cas,
M2 - hMi est une martingale continue et
si M0 = 0, on a :
E[hMiT].
E[M2 t ] = E[hMit],
?t ? T. De plus, M est bornée dans
£2 si et seulement si
E[hMit] < +8 et dans ce cas : E[M2
T] =
L'espace H2 c muni du produit scalaire (M,
N)H2 c = E[hMiT] est un
espace de Hilbert.
Le théorème suivant est connu sous le nom de
théorème de décomposition de Doob-Meyer des
surmartingales.
Théorème 1.3.15.
(Décomposition de Doob - Meyer) Soit X une surmar-tingale
càd - làg. Alors X admet une décomposition unique
de la forme
X = X0 + M - A (1.2)
où M est une martingale locale
càd-làg nulle en 0 et A est un processus prévisible
croissant et nul en 0. Si X est positif, alors A est intégrable,i.e.
E[AT] < +8, où AT = limt~T
At p.s.
29
Définition 1.3.21. Une semimartingale
est un processus càd - làg adapté X admettant une
décomposition de la forme
X = X0 + M - A (1.3)
où M est une martingale locale càd - làg
nulle en 0 et A est un processus prévisible croissant et nul en 0. Si X
est positif, alors A est intégrable,i.e.
Théorème 1.3.16.
(Théorème de Girsanov)[Pham [150],p.22] Soit Q
« p et Z son processus de densité martingale. On suppose que Z est
continu. Soit M une martingale locale continue. Alors le processus
Z 1
MQ = M - Z d(M, Z(
est une Q-martingalelocalecontinue De plus, si N est une
martingale locale continue, on a
(MQ, ZQ(= (M, Z(
Si on a de plus Q ti P, i.e.,Z est strictement positif
presque sûrement, alors il existe une unique martingale locale continue L
nulle en t = 0, telle que :
1
Zt = exp(Lt - 2(L, L)t) =: Et(L), t E 7r, p.s. et
L est donné par
t1
Lt = f Z3 dZ3, t E r, p.s.
La Q - martingale locale MQ s'écrit alors
aussi
MQ = M - (M,L(.
Dans le cas d'un mouvement brownien, on a le résultat
important suivant.
Théorème 1.3.17. (Cameron -
Martin)[150] Soit W un mouvement brownien. Soit Q ti P de processus de
densité martingale
dQ
dP |Ft = Et(L),
où L est une martingale locale continue. Alors le
processus
WQ = W - (W,L(.
est un Q - mouvement brownien.
30
Il est important d'avoir des conditions assurant que
(L) soit une martingale.
Proposition 1.3.17.1. (Condition de
Novikov)[150] Soit L une martingale locale continue avec L0 = 0 telle
que
E[exp(1 2hW,Lh
T )] < +8.
|
Alors L est une martingale uniformément
intégrable avec E[exp(L T
2
|
)] < +8
|
et (L). est une martingale
uniformément intégrable.
Définition 1.3.22. (Le pont brownien)
Soit {X(t) : t 0} un mouvement brownien
standard. Le processus {Y (t) : 0 6 t 6
1brownien.}, où Y (t) :=
X(t)tX(t) est appelé pont
brownien.
Presque toute trajectoire de ce pont est une courbe continue sur
[0, 1] passant par les points (0, 0) et (1, 0)
Propriété 1.3.1. Les fonctions
d'espérance et des variances - covariances du pont brownien sont
données par:
(a) E[Y (t)] = 0 0 6 t 6 1
;
(b) cov(Y (s),Y
(t)) = s(1 - t)(0 6 s 6 t 6 1)
Proposition 1.3.17.2. Soient
{X(t) : t 0} un mouvement brownien
standard et 0 < t1 < ... < tn
< 1 une suite de nombres. Alors la loi de
(X(t1),...., X(tn)),
conditionnelle à {X(1) = 0} suit la loi normale
N(0, F')
En particulier, pour 0 < s < 1, la loi de
X(s) conditionnelle à {X(1) = 0} \/est la loi
normale N(0, s(1 - s).
31
Chapitre 2
Equations Différentielles et
Intégrales Stochastiques
Ce chapitre a comme objectif de donner la formulation des
équations différentielles stochastiques en clarifiant la
différence entre équations différentielles stochastiques
ordinaires et partielles. Certes, beaucoup de phénomènes
aléatoires tant naturels qu'économiques apparaissent dans un
environnement incertain et peuvent être modélisés sous
forme d'équations différentielles. Le développement plus
détaillé, avancé et récent des équations
différentielles et intégrales stochastiques peut être
trouvé dans les ouvrages [88],[89][12],[54], [92].
2.1 Calculs stochastique
Définition 2.1.1. [87] Pour X et Y
E Q, on dit que X et Y sont équi-valent,i.e.,
X Y si X(t) - X(s) = Y (t) - Y (s) p.s.
pour tout 0 s t.
clairement cette relation est une relation
d'équivalence. La classe d'équivalence contenant X est
représentée par dX et appelée
différentielle stochastique de X. Par
définition, js t dX(u) est le processus X(t) -
X(s).
Soit dQ = {dX;X E Q}, di =
{dM;M E i} et d = {dA;A E }. On
introduit les opérations algébriques suivantes :
(i) Addition : dX + dY = d(X + Y ), pour X, Y E
Q.
(ii) Multiplication : dX.dY = (MX, MY ), pour X, Y
E Q. où MX et MY sont les parties martingales
respectivement de X et Y .
(iii) â - multiplication : si ö E
â et X E Q alors
Z t Z t
(ö.X) = X(0) + 0 ö(s, w)dMX(s)
+ 0
ö(s, w)dAX(s), t > 0
est définie comme un élément dans
Q.
Comme d(ö.X) est uniquement définie a
partir de ö et dX. Maintenant on définit un
élément ö.dX de dQ par
ö.dX = d(ö.X)
.
Théorème 2.1.1. [87] L'espace
de dQ avec les opérations (i) - (iii) est une algèbre commutative
satisfaisant aux relations suivantes :
1. ö.(dX + dY ) = ö.dX + ö.dY
2. ö.(dX.dY ) = (ö.dX).dY
3. (ö + ø)dX = ö.dX + ø.dX
4. (ö.ø).dX = ö.(ø.dX)
pour ö, ø E â et dX, dY E dQ.
Si X1, X2, ...,
Xd E Q et f est une fonction continue de classe
C2 alors Y = f(X1,
X2, ..., Xd) E Q et la
différentiation totale de la fonction f est
|
dY =
|
d i=1
|
d
(?if).dXi + E
(?i?jf).dXi.dXj, 2i,j=1
|
32
où ?if et ?i?jf sont les
éléments de â définis respectivement par
?xi (X1, X2, ...,
Xd) et ?2f
?f ?xi?xj (X1,
X2, ..., Xd).
Si dX1, dX2,....,
dXd E du et dXidXj = äijdt, i, j = 1,
2, ...., d, alors (X1(t),
X2(t), ..., Xd(t)) est une martingale de
Wiener de d dimensions.
33
2.2 Equations différentielles stochastiques
Cette section donne quelques notions importantes sur les
équations différentielles stochastiques. L'objectif poursuivi ici
est de faire la différence entre les équations
différentielles stochastiques ordinaires et les équations aux
dérivées partielles stochastiques. Ces formulations
mathématiques ont une importance capitale car beaucoup de
phénomènes stochastiques, par exemple économiques, sont
produits en suivant ces types de modèles statistiques ([7],[8],
[34],[26], [151],[58],[62],[87],[95],[101],[107],[68],[114],
[113],[138],[145],[149],[62], [156],[88], [89],[162]).
2.2.1 Equations différentielles stochastiques
ordinaires
Soit W(t) un processus stochastique satisfaisant le
système suivant :
dW(t)' =
á(W(t), t) + u(W(t),
t)dW(t), W(0)' = W0
avec á(x,t) =
(á1(x,t),· · ·
,án(x,t)) et
cr(x,t) = uij(x,t), 1 =
i,j = n. On suppose que á(x, t) et
u(x, t) sont mesurables dans Rn
×[0, T], et satisfaisant les conditions
suivantes :
(1) condition lipschitzienne ku(t, x)
- u(t, y)k = K|x - y|
|á(t,x) - á(t,y)| =
K|x - y|
(2) condition de croissance linéaire
ku(t, x) - u(t, y)k2 =
K(1 + |x|2) |á(t, x) -
á(t, y)|2 = K(1 +
|x|2)
et W0 est indépendant du mouvement brownien
W(t),
E | W0 |2< 8.
Théorème 2.2.1
(Théorème de l'existence et unicité de
solutions). Soient les équations ??
et Alors,il existe une solution unique W de kkkkkkkkkkk
et dans M2 w[0,
T]. L'unicité signifie que si W est une autre solution
dans M2 w[0,T],
alors
P[W(t) =6 W(x)] = 0,
34
Démonstration. On va démontrer
l'existence et l'unicité de la solution de l'équation
différentielle stochastique. Pour l'existence, on définit
Z t Z t
Øm+1(x) = Ø0 + 0
á(Øm(s), s)ds
+ 0
u(Øm(s),
s)dcw(s), m > 0
et on fait par induction que Øm ?
M2w[0, T] et
E | Øk+1(t) -
Øk(t) |2 = (Mt)k+1
(k + 1)! pour 1 = k = m -
1,
où M est une constante positive
dépendante de k et T. Il est facile de
démontré que existe pour k = m et
Øm+1 ? M2w[0,
T]. Ensuite, on trouve que
|
E sup
|{z}
0<t<T
|
| Øm+1(t) -
Øm(t) |2= C(MT
)m
m! .
|
|
Par conséquent P( sup
|{z}
0<t<T
|
| Øm+1(t) -
Øm(t) |>1
2m) =2mC(MT )m
m! .
|
Le Lemme de Borel - Cantelli implique que
|
P( sup
|{z}
0<t<T
|
| Øm+1(t) -
Øm(t) |> 1
2m i.o) = 0.
|
Ainsi pour tout w, il existe m0 =
m0(t) tel que
(sup | Øm+1(t) -
Øm(t) |> 1
2m) = 0. si m0 =
m0(w).
Il s'en suit que la suite Ø0 + Pô
(Øm+1(t) - Øm(t))
converge uniformément
dans t ? [0,T].
En notant la limite par 0(t) nous avons en
suite
2.2.2 Equations aux dérivées partielles
stochastiques
Dans cette section, nous allons étudier les
problèmes de certaines classes des équations aux
dérivées partielles stochastiques du premier et deuxième
ordre.
Soit l'équation aux dérivées partielles
stochastiques du premier ordre
Z t
u(x, t) - f(x) = 0
F(x, u, ux, ?ds)
où ?ds représente l'intégrale
stochastique de Stratonovich. Le théorème suivant prouve l'existe
et l'unicité des solutions de l'équation aux
dérivées partielles linéaires du premier ordre.
Théorème 2.2.2.
(Théorème de l'existence ) On suppose que la
fonction F de l'équation ( ? ? ?) est une Ck,ä -
semimartingale continue avec la caractéristique locale appartenant
à la classe
(Bk+1,ä,
Bk,ä) pour quelque k = 4 et
35
S = 0 et f est une fonction de Ck,ä.
Soit (çot, 17t, Xt) la courbe caractéristique
stochastique de l'équation. La fonction u(x, t) est définie
par
~ ) [ ]
u(x, t) = ç ?_1(x) , t
? 0, u(x) ,
est une solution locale de l' équation (2.7). De plus,
elle est une Ck-1,å - semimartingale continue locale
pour tout > 0.
Avant la démonstration du théorème, nous
donnons le lemme suivant qui va aider à démontrer ce
théorème de l'existence et de l'unicité de solutions de
l'équation aux dérivées partielles linéaires du
premier ordre.
Lemme 2.2.2.1. Soit ?i =
?-1
d . Les relations suivantes sont alors
vérifiées :
Le théorème suivant donne la condition de
l'unicité de solution de l'équation aux dérivées
partielles stochastiques du premier ordre annoncée ci - dessus.
Théorème 2.2.3 (Unicité de
solution). Nous supposons que les mêmes
condi-
tions pour F et f .[ ]
Soit u(x, t), t ? 0, cr(x)une solution locale
arbitraire de l'équation 5 tel
qu'elle est une Ck-1,å -
semimartingale pour > 0. Alors elle peut s'écrire comme suit
:
[ ]
u(x, t) = çt ?
øt(x) pour t ? 0, T (x) ?
u(x)
Définition 2.2.1. ([87]) Soit Xt
une semi - martingale continue, c'est - à - dire, un processus
représenté sous la forme suivante :
Xt = X0 + Mt + At
où X0 est une variable aléatoire .T
- mesurable, Mt est une martingale et At est la partie variationnelle
fermée.
On présente le problème à valeurs
initiales des équations aux dérivées partielles
stochastiques du second ordre à coefficients aléatoires suivant
:
Z t d Z t
0 F i(x, ?ds) ?u
u(x, t) = f(x) + 0 Lsu(x, t)ds
+ ?xi (x, s)
i=0
Z t
+ 0
Fd+1(x, ?ds)(x, s),
où Ls est un opérateur
elliptique de la forme ,
1 XLsu =
ij
?
2
2 a
(x, s)
aaxj+ bi(x's)ax Ou
+ d(x, s)u i i
36
et le domaine aléatoire (F1,
F2, ..., Fd+1) sont des
fonctions Ck,d - semimar-tiangale satisfaisant la condition
(D1)k,ä pour tout k > 3 et
ä > 0 tous deux pour avant et arrière direction. Les
différentielles Fi(x, ods) sont les
différentielles de Stratonovich. Dans le séquentiel, nous
supposons que les coefficients de l'opérateur Ls
satisfont la condition suivante (D2)k,ä
pour tout k > 3 et ä > 0. La condition
(D2)k,ä, il existe une fonction non
négative et symétrique continue aij(x, y,
s) appartenant à la classe Ck+1,ä
ub telle que
aij(x, s) =
aij(x, x, s). La fonction d(x,
s) est continue en (x, s) et de classe Ck,b.
De plus aij et d
(1+|x|) sont des fonctions bornées
Ldu = 2 E Ëij(x,
y, t) ?xiaxj E
[Ëi,d+1(x,y,t) +
Ci(x,t)J?xi t=1
1
+ 2
D(x, t) +
Ëd+1,d+1(x, y, t)u
où Ci(x,l) = Ed
?azyz 1(x, y, l) . En
faisant recours à l'intégrale d'Itào,
y=x
l'équation (1) peut être écrite comme suit
Z t
u(x, l) = f(x) + 0
(Ls + Ls)u(x,
l)ds
d r ?u r
+ E f Fi(x, ds) ?xi
(x, s) + f
Fi(x, ds)u(x, s)
r=1
En effet, les intégrales de Stratonovich sont
représentées par
Z0
r au r ôu 1 au
Fi(x, ods) =
Fi(x, ds) + (F(x, t),
)
?xi o axi 2 axi
fr au 1 r d ?2u
Fi (x, ds)
+ Ëj (x, x, s) ds
o ?xi 2 ( fo 0 i axi?xj
r d ?Ëij ?u i,d+1
?u
+ + Ë (x, x, s) ds
Jo ?yi y=x ?xj
?xi
j=1
+f
r?Ëz?(x,y,s)
udsl
o ?y y=x /
37
De façon similaire, nous avons
lot
Fd+1(x,ods)u
= J t Fd+1(x, ds)u + 2
{ f t [Ëd+1(x,x,s)?xjids
f
t d+1 d+1 1
o J
d t
En substituant ces relations dans l'équation (1), nous
obtenons l'équation (4). Inversement, soit u(x, t) un
C2- processus continu satisfaisant l'équation
représentée par les intégrales
d'Itào suivantes
u(., t) = f + f
Ësu(s)ds + E f
Fi(., ds)?x + f t
Fd+1(.,
ds)u(s).
i=1
Si la fonction u(x, t) est une
C2 - semimartingale, elle est
représentée par
l'équation (1), en remplaçant
Ls par Ës -
Ls où Ls
est définie par l'équation 3.
2.3 Intégrales stochastiques
Dans cette section, nous présentons de façon
brève, sans démonstration, certains théorèmes et
définitions sur les intégrales stochastiques d'Itô et
Stratonovich.Les intégrales stochastiques jouent un rôle important
dans l'évaluation des équations différentielles
stochastiques. Pour constituer cette partie nous avons consulté certains
ouvrages( voir [87], [111],[146], [155], [90], [164], [43], [23], [24]).
2.3.1 Intégrale Stochastique d'Itô
Avant de définir l'intégrale d'Itô , on va
définir l'intégrale de Wiener pour le mouvement Brownien. Soit
f une fonction déterministe et f E
L2[a, b].
Définition 2.3.1. ([111],p.11)
L'intégrale de Wiener de f est notée par
Za
b f(t)dB(t) ou f b
f(t)dB(t, w)
a
Théorème 2.3.1. Pour chaque
f E L2[a, b],l'intégrale de Wiener
fab f(t)dB(t) est une variable
aléatoire Gaussien de moyenne nulle et de variance
II f II2= fa b f(t)2dt.
Ainsi,l'intégrale de Wiener I :
L2[a, b] ? L2(Ù) est une
isométrie Car elle préserve le produit scalaire comme
montre le corolaire suivant.
Corollaire 2.3.1.1. Si f, g E
L2[a, b], alors
Z b
E(I(f)I(g)) =
a f(t)g(t)dt.
En particulier,si f et g sont orthogonales
alors les variables aléatoires Gaussiennes I(f) et
I(g) sont indépendantes.
Théorème 2.3.2.
([111],p.12) Soit f une fonction continue de variations
bornées. Alors pour presque tout w E Ù,
fab f(t)dB(t))
(w) = fb f(t)dB(t,
w),
a
où à gauche comme à droite de
l'équation ci-haut, il s'agit respectivement de
l'intégrale de Wiener et Riemann -Stieltjes.
Le théorème suivant donne la formule
générale d'Itô.
Théorème 2.3.3. ([111],p.103)
Soit Xt un processus d'Itô donné par
Xt = Xa + f t
f(s)dB(s) + f t g(s)ds, a
< t < b.
a a
Supposons que Z(t, x) est une fonction
continue avec les dérivées partielles
continues ?Z ?t,?Z
?x,?2Z
?x2 . Alors Z(t, Xt) est aussi un
processus d'Itô et
Z(t, Xt) = Z(a,
Xa) + ft Ox
(s,
Xs)f(s)dB(s)
ds.
t 2
ât (s, Xs) +
Ox
+ f(s,
Xs)f(s)21
s
(s, X
)g(s) + 2 âx2
38
Avant de présenter la formule d'Itô de dimension
n,nous donnons d'abord la définition d'une matrice
stochastique.
Définition 2.3.2. ([28],p.7) Soit
N un entier strictement positif. Une matrice P de taille N xN est une matrice
stochastique si ses éléments de matrice pij =
(p)ij satisfont
0 < pij < 1, Vi, j,
et
XN pij = 1, Vi. j=1
Soient B1(t), B2(t), ...,
Bn(t), n mouvements browniens
indépendants.
On considère n processus d'Itô
x(1)
t , x(2)
t , ..., x(n)
t , données par
|
xt = x(0) +
(i)
|
m t
X f fij(s)dBj(s) +
f gid(s), 1 < i < n,
j=1 a a
|
ou fij E
Lad(Ù, L2[a, b]) etgi E
Lad(Ù, L1[a, b]), V
1 < t < n et 1 < t < m. Sous forme
matricielle,
|
?
?
B(t) = ?
|
B1(t)
...
Bm(t)
|
? ? ? ? ?
(1)
xt g1(t)
? , Xt =?...?, g(t) =?
?... ?
x(t) gn(t)
m
|
,
?
?
f(t) = ?
?
f11(t) ...
f1m(t)
?... ... ... ?
fn1(t)
... fnm(t)
39
L'équation (1) peut être écrite comme suit
:
Xt = Xa + f t
f(s)dB(s) + f t g(s)ds, a
< t < b.
a a
~ ~
On suppose que ø t, x(1)
t , x(2)
t , ..., x(n) est fonction continue
sur
t
[a, b] x Rn et a des
dérivées partielles continues
?Ø?t , ?xi
?Ø, ?2Ø
i,j < n.
?xi?x; , pour , 1 <
La différence totale stochastique de Ø(t,
x(t)(1), x(t)(2),
..., x(t)(n)) est donnée par
dØ(t, x1(t),
x(t)2 , ...,
xn(t)) = ?Ø?t
(t, x(t)(1),
x(t)(2), ...,
x(t)(n))dt
X ?Ø
+ ?t (t, x1(t),
x2(t), ...,
xn(t))dxi(t)
1 X ?2Ø
+?x(t)i?x(t)j
(t, x(t)(1), x(2)
t , ...,
x(t)(n))dx(t)(i)dx(t)(j)
2
où le produit dx(i)
t dx(j)
t doit être calculé en utilisant la table
d'Itïô suivante
x dBj(t) dt
dBj(t) äijdt 0
dt 0 0
Le produit dBi(t)Bj(t) = 0
pour i =6 j est l'expression symbolique du fait suivant.
Soient B1(t) et B2(t) deux mouvements
browniens indépendants et soit
40
On = {t0, t1, ...,
tn} une partition de [a, b]. Alors
>(B1(ti) -
B1(ti1)(B2(ti) - B2(ti1)
-+ 0 dans L2(Ù) quand
On = max(ti - ti_1) -+ 0.
Soit M(t) une martingale continue à
droite avec des limites à gauche finies tel que
E(M(t)2) < oo pour chaque
t E [a, b].
Théorème 2.3.4. Soient
M(t) une martingale continue de carrée
intégrable et F une fonction continue de classe C2.
Alors,
F(t, Mt) = F(a,
Ma) + fat ?t (s, Ms)ds x
+ fa dMs + 2 fa
a2x2 (s,
Ms)d(M)s
2.3.2 Intégrale Stochastique de Stratonovich
L'intégrale stochastique de Stratonovich est une
application du calcul d'Itô. Elle constitue un outil puissant dans la
résolution des équations aux dérivées partielles
stochastiques. Cette étude réfère aux livres [111],[145].
On considère une intégrale simple dans le calcul de Leibniz -
Newton :
f
b f(x)dx = F(b)
- F(a). L'égalité correspondante dans
le calcul d'Itô est donné par
Z b
a f(B(t))dB(t) =
F(B(b)) - F(B(a)) -
2 f b f(B(t))dt.
La différence entre les deux formules
susmentionnés est le terme additionnel dans l'intégrale
d'Itô. Ce terme est une conséquence de la variation quadratique
non nulle du mouvement Brownien B(t). Mais aussi il est une
conséquence de la définition de l'intégrale
d'Itô.
Définition 2.3.3. ([111],p.120)
Soient Xt et Yt deux processus d'Itô. L'intégrale
stochastique de Stratonovich de Xt sachant Yt est définie par
:
f
b b 1 b
Xt o dYt = XtdYt + 2 L
(Xt)(dYt), a a
ou par sa forme différentielle équivalente
:
1
Xt o dYt = XtdYt +
2(Xt)(dYt).
Proposition 2.3.4.1. Soient x et y deux
semimartingales. La différentielle et l'intégrale sont
données par y o dx = y.dx +
12dy.dx et
f0t odx =
ft0(y, x)t
oï3/412 o est le produit de
Stratonovich.
(1) Soient x et y dans Sc,alors
l'intégrale se Stratonovich - Fisk s'écrit :
f0t y o dx = E yTi+yTi+1
2 (xTi+1 - xTi) en
probabilité.
(2) Si ni x ni y est dans Ac, alors
f0t y o dx = f0t ydx.
Les propriétés importantes de l'intégrale
stochastique de Stratonovich sont énoncées dans le
théorème suivant.
Théorème 2.3.5. Les
propriétés de l'intégrale stochastique de Stratonovich
sont les suivantes :
(1) x o (dy + dz) = x o dy + x o dz,
(2) (x+y)odz=xodz+yodz,
(3) x o (
dy.dz) = (x o dy).dz,
(4) x o (
dy.dz) = x o (
dy.dz) ou x o (
dy.dz) = (x.y) o dz.
Théorème 2.3.6. Supposons que
x1, x2, ..., xd sont des semimartingales continues. De
plus,on suppose que U est un sous- ensemble ouvert de Rd et que
(x1, x2, ..., xd) E U pour tout t , avec une
probabilité égale à 1. Soit f : U -+ R de classe
C3. Alors,
f(x1, x2, ..., xd) = Edi=1
aif(x1, x2, ..., xd) o dxi.
Nous pouvons poser la question suivante : est-que
l'intégrale de Stra-tonovich fab f(t) o dB(t)
peut - elle être définie comme la limite de somme de Riemann
? La réponse à cette question pour une fonction f(t, B(t))
est donnée par le théorème suivant.
Théorème 2.3.7. [111] Soit
f(t, xt) une fonction de classe C2. Alors,
|
Za
|
b
f(t, B(t)) o dB(t) = lim
|{z}
IIonII-+0
|
Xn i=1
|
1
f(t* i ,
2(B(ti_1) + B(ti)))(B(ti) +
B(ti_1),
|
41
en probabilité, où ti_1 < tz
< ti, On = {t0, t1, ...,
tn_1, tn} est une partition
de
|
l'intervalle fini [a, b] et II On II= max
| {z }
1<i<n
|
(ti - ti_1).
|
2.4 Schémas numériques
On décrit dans cette section des méthodes
numériques pour la résolution d'équations
différentielles stochastiques développées dans les
ouvrages
42
de Kloeden et Platen [106], [105], Jentzen et Kloeden[95],
[94].
Pour approcher numériquement l'équation
différentielle stochastique
dXt = t9(t, Xt)dt + u(t, Xt)dBt,
on utilise des schémas aux différences
classiques et le fait que pour un pas h donné les variables
(B(n+1)h-Bnh) suivent des lois
gaussiennes indépendantes de variance h. On note xt le
processus approché et on considère la subdivision 0 = t0
< t1 < .... < tN_1 < TN = T
de pas régulier h = At = tn+1 -
tn. Dans le cas multidimensionnel t9 = (t91,
..., t9n) et Xt = X1(t), ..., Xn(t))
sont des vecteurs de Rn.
Le mouvement brownien a p composantes Bt =
(B1(t), ..., Bp(t)) et crj(cr1 j
, ..., crn j ) pour j = 1, ..., n.
L'équation s'écrit comme suit
dXt = t9(t, Xt)dt + Xp uj(t,
Xt)dBj(t),
i=1
et se traite de la même manière.
La vitesse de convergence forte du schéma est le plus
grand coefficient á tel que
EMXT - xNhM =
O(há)
et la vitesse de convergence faible est le plus grand coefficient
3 tel que E|Ef(XT) - Ef(xNh)| =
O(hâ)
pour tout polynôme f.
2.4.1 Schéma d'Euler
On utilise l'approximation suivante
dXt dt '
Xt+h - Xt
h
valable lorsque le pas h = At est suffisamment
petit. Sur un intervalle élémentaire [t, t + h],
l'équation générique devient
Z t+h Z t+h
Xt+h ' Xt t t9(t, Xt)ds + t ó(t,
Xt)dBs,
43
Le processus approché xt consiste à
considérer les intégrands constants
xt+h = xt + h19(t, xt) +
u(t, xt)(B(n+1)h - Bnh).
Le schéma d'Euler converge en moyenne quadratique vers
Xt quand h tend vers 0. La mauvaise convergence de ce
schéma est due à la présence de l'intégrale
stochastique dont la majoration est trop grossière. Pour remédier
à cela on introduit le développement de Taylor.
2.4.2 Schéma de Milstein
Les ouvrages qui traitent dans l'application de la
méthode de Runge - Kutta aux equations différentielles
stochastiques ( [139],[157][112], [95]).
On remplace le processus Xt par une approximation
Xtn. On a
1
Xt = Xtn +
19(tn, Xtn)h -
2u(tn,
Xtn)axu(tn, Xtn)h
+ u(tn, Xtn) A
Bn + u
2(tn, Xtn)axu(tn,
Xtn)(ABn)2.
1
dans le cas multidimensionnel avec les notations
précédentes et sous la condition que
?xój.ók =
?xók.ój
Xtn+1 = Xtn +
19(tn, Xtn)h + E
crj(tn, Xtn) An+1 Bj
uk(tn,
Xtn)cj(tn, Xtn) An+1 Bj
An+1 Bk
E
k<j
E p
+
j=2
1
2
+
Ep i=1
cj(tn,
Xtn)cj(tn,
Xtn)((ABj)2 -
h).
avec
ABj = Bj(tn+1) -
Bj(tn)
. La convergence forte du schéma de Milstein vaut 1. Ce
schéma est donc meilleur que le schéma d'Euler, mais plus
compliqué à programmer. En utilisant des développements
d'ordre supérieur, on peut espérer améliorer la
convergence.
44
2.4.3 Schéma de Heun
Soit l'équation différentielle stochastique de
Stratonovitch suivante [94]
dXt = ?(t, Xt)dt + ó(t, Xt) o dBt
équivaut à équation différentielle
stochastique d'Itô suivante
1
dXt = (?(t, Xt) + 2ó(t,
Xt)?xó(t, Xt))dt + ó(t, Xt)dBt
qui discrétisée selon le schéma de Heun
s'écrit
1 1
Xtn+1 = Xtn + 2h(?(tn,
Xtn) + ?(tn, Ytn)) +
2(ó(tn, Xtn) + ó(tn,
Ytn) 4 Bn.
avec
Ytn+1 = Xtn + ?(tn, Xtn)h
+ ó(tn, Xtn) 4 Bn.
Le schéma de Heun converge en moyenne quadratique et est
d'ordre O(h2).
2.4.4 Méthodes de Runge - Kutta
Il y a plusieurs ouvrages qui traitent de l'application de
méthode de Runge - Kutta aux equations différentielles
stochastiques ( [157],[112], [95],[139]).
Dans le cas des équations différentielles
stochastiques, les méthodes de Rung - Kutta utilisent deux vecteurs
á et â et deux matrices A et
B. Le schéma est de la forme
Xtn+1 = Xtn + hö(tn,
Xtn, h) + ø(tn, Xtn, h) 4
Bn.
où les fonctions ö et ø sont
définies par
ö(tn, Xtn, h) =
á2k2, á1k1, ..., árkr.
ø(tn, Xtn, h) =
â2l2,â1l1, ...,
ârlr.
avec
k1 = ?(tn, Xtn), ..., kj =
?(tn + cjh, Yj), l1 = ó(tn,
Xtn), ..., lj = ó(tn + cjh, Yj)
45
et
Ytn+1 = Xtn + h j-1 X
aiuku + j-1 X bjuku A Bn.
u=1 u=1
Les vecteurs á et â
vérifient
á1 + á2 + ... +
ár = 1,â1 + â2 +
... + âp = 1,
Les éléments supérieurs de la matrice
A sont nuls,aij = 0 si j > i et les coefficients
cj sont les sommes des éléments d'une ligne de la
matrice A
Si ?,â et toutes leurs
dérivées sont bornées alors le schéma de Runge -
Kutta converge en moyenne quadratique vers la solution Xt de
l'équation d'Itô suivante
dXt = (?(t, Xt) +
ëó(t, Xt)?xó(t,
Xt))dt + ó(t, Xt)dBt avec
ë = 0 si r = 1, et si r > 1
|
ë =
|
r j=1
|
bj
|
j-1 X u=1
|
bju.
|
2.4.5 Schéma de Platen
Dans le schéma de Platen, on utilise l'approximation
des incréments du brownien et de leur intégrale. On pose
n+1
AUn =
f(Bs - Btn)ds
n
Le schéma est de la forme
Xtn+1 = Xtn +
h?n + ón A Bn +
2ón?xón((ABn)2 -
h)
1
+ ón?x?n A Un +
(?n?x?n + 2(ó2
1n?xxón)(h A
Bn - AUn) +
12?xxón
avec
?n = ?(tn,
Xtn), ón =
ó(tn, Xtn),
La converge de ce schéma est en
O(h3).
46
Chapitre 3
Applications des intégrales
stochastiques à l'estimation
statistique
Ce présent chapitre présente les applications
des intégrales stochastiques à la théorie de
l'inférence statistique. Le domaine de l'estimation statistique est
vaste ([37], [170], [172],[63], [122],
[118],[184],[120],[171],[117],[116],[91]).
Ces cinq dernières décennies, les recherches ne
cessent de croire abondamment dans l'estimation de paramètres des
équations différentielles stochastiques et la théorie de
filtre stochastique Arato,Kolmogorov et Sinai (1962) et Liptser et Shiryayer
(1978)( [124], [22],[91] [86],[110], [116],[21]).
Dans cette recherche l'estimation de paramètres des
équations différentielles stochastiques et la théorie de
filtre stochastique sont considérées. Car ces deux techniques
sont des outils puissants dans le domaine de la modélisation
macroéconométrique ([131] [130],[128],[127][11]).
3.1 Estimation de paramètres des équations
différentielles stochastiques
L'estimation de paramètres des équations
différentielles stochastiques consti-
tue l'un des problèmes majeurs de la théorie de
l'inférence statistique moderne([6],[152], [126]).
47
3.1.1 Estimation des paramètres pour les
équations différentielles stochastiques linéaires
Le Breton(1998) a étudié l'estimation de
paramètres et l'estimation de filtre dans un modèle
linéaire simple conduit par les mouvements browniens de diffusion. Aussi
et Le Breton (2002) ont étudié les problèmes d'estimation
des paramètres pour le processus de type Ornstein - Uhlenbeck
fractionnel ([154] ).
L'un des outils de base dans l'étude de la
théorie de l'asymptotique de l'inférence statistique est le
concept de la normalité. Plusieurs propriétés importances
des estimateurs exigées dans tels processus apparaissent comme une
conséquence de la normalité asymptotique locale de la famille de
mesures de probabilité générée par les
processus.
On considère l'équation différentielle
stochastique linéaire
dXt = ä(è, t, Xt)dt
+ ødWtH, (3.1)
X0 = x0, 0 < t < T,
où X0 E R, ö E
(0,1), ä(è, t, Xt) :
Rd x R -- R est une fonction
déterministe avec le paramètre, è E O E
Rd est un paramètre inconnu et WH =
{WtH, 0 < t < T} est un processus
brownien fractionnel avec l'indice de Hurt H E
(12, 1). L'équation 3.1.1
modélise un système dynamique avec un petit bruit qui est un
processus Brownien fractionnel.
On suppose que le processus {Xt, 0 < t < T}
est observé sur un intervalle [0,T]. Le problème
d'intérêt est l'estimation de paramètre è
basée sur les observations ou les données {Xt, 0
< t < T}.
Nous définissons le concept de la normalité
asymptotique locale pour une famille de mesures de probabilité.
Nous discutons généralement sur les classes de
processus stochastiques satisfaisant l'équation différentielle
stochastique linéaire conduit par un mouvement brownien fractionnaire et
l'étude des estimateurs de maximum de vraisemblance et de Bayes de ces
processus.
On considère l'équation différentielle
stochastique suivante :
dXt = ä(è,t, Xt)dt
+ ødWtH, X0= x0, 0
< t < T,
où X0 E R, ö E (0,
1), ä(è, t, Xt) : Rd
x R -- R est une fonction déterministe avec le
paramètre, è E O E Rd est
un paramètre inconnu et
WH = {WtH, 0 <
t < T} est un mouvement brownien fractionnaire avec l'indice de
Hurst H E (12,1). L'équation 4.1
modélise un système dynamique
avec un petit bruit qui est un processus Brownien
fractionnaire. On suppose que le processus {Xt, 0 < t <
T} est observé sur un intervalle [0,T]. Le problème est
l'estimation du paramètre è basée sur les
observations ou les données {Xt, 0 < t <
T}.
On définit le concept de la normalité
asymptotique locale pour une famille de mesures de probabilité. On
analyse les classes de processus stochastiques satisfaisant l'équation
différentielle stochastique linéaire conduit par un mouvement
brownien fractionnaire et l'étudions les estimateurs de maximum de
vraisemblance et de Bayes de ces processus.
On considère l'équation différentielle
stochastique un processus brownien fractionnaire suivante :
dXt = [á(t, X(t)) + èâ(t, X(t))]dt +
ó(t)dWH, X(0) = 0, t > 0,
où è E O C 1R, W
= {WtH, t > 0} est un processus
brownien fractionnaire avec un paramètre de Hurst et ó(t)
est une fonction positive non nulle dans[0, +oo). En
d'autres termes,X = {Xt, t > 0} est un processus
stochastique satisfaisant l'équation intégrale stochastique
Z t Z t
X(t) = 0 [á(s, X(s)) + èâ(s,
X(s))]ds + 0 ó(s)dwH, t >
0
avec ?(è, t) = á(t, X(t)) + èâ(t,
X(t)).
On suppose que les trajectoires de l'échantillon du
processus
[?(è,t)
ó(t) ,t > 0] sont tels que le
processus
QH,è(t) =dWtH ft kH(è, s)
ó((,) , t > 0.
On suppose que les trajectoires de l'échantillon du
processus {QH,è(t), 0 < t <
T} appartiennent presque sûrement à
L2([0, 1], dWH(t)). On
définit
Z(t) =
lo ó(è) , t > 0.
t kH(è, s)
48
Alors, le processus Z(t) = {Z(t), 0 <
t < T} est une Fø - semimartingale
qui admet le processus de décomposition suivante :
t
Z(t) = Jo
QH,è(s)dWH(t) + MH(t)
49
où MH est une martingale
fondamentale et le processus X admet la représentation
suivante:
Z t
X(t) = 0 Kó H(t, s)dZs
où la fonction Kó H est définie par
:
Z t
Kf H(t, s) = -2H d s f(r)rH-
2 1 (r - s)H- 2 1
dr, 0 s t. ds
Comme en déterministe, pour estimer les paramètres
des équations différentielles stochastiques, il important de
donner les conditions de l'existence et de l'unicité. de solutions. Pour
l'équation ??,on donne le théorème
suivante.
Théorème 3.1.1.
Soit Pè T la mesure induite par le
processus X(t) = {X(t), 0 t T}
où est le vrai paramètre. Kleptsyna et al.(2000)
ont dérivé le théorème de Girsanov - type qui
permet de trouver la dérivée de Radon - Nikodym de
PèT relativement à P 0
Tde la manière suivante [154] :
|
P è T P 0 T
|
Z T Z T
= exp{ 0 QH,è(s)dZs - 1 0 Q2
H,è(s)dW s H }.
2
|
Cette quantité est indispensable pour l'utilisation de
la méthode du maximum de vraisemblance dans l'estimation des
paramètres de modèles statistiques.
Cette quantité est indispensable à l'utilisation
de méthode du maximum de vraisemblance dans l'estimation des
paramètres de modèles statistiques.
3.1.2 Méthodes d'estimation des
paramètres
La littérature est vaste mais cette étude a
retenu seulement deux méthodes parmi les utilisées,
méthode de maximum de vraisemblance et méthode bayésienne,
à cause de leur fondement mathématique solide et leur robustesse
dans les études empiriques.
3.1.3 Méthode de maximum de vraisemblance
Cette méthode est couramment utilisée en analyse
statistique empirique
([51],[19],[42], [16], [142],[121], [159],[96],[48],[69],[148],
[137],[70])
50
On considère le problème de paramètre
è basé sur l'observation du processus X =
{Xt, 0 < t < T} et étudions ses
propriétés asymptotiques
T
quand T -+ oo. On note par
LT(è) la dérivée de Radon - Nikodym
dpô .
L'estimateur de maximum de vraisemblance
àèT est défini par la relation
|
LT(
|
àèT) = sup
\J
èEÈ
|
LT(è).
|
On suppose qu'il existe un estimateur mesurable du maximum de
vraisemblance. Les conditions suffisantes peuvent être données
pour l'existence d'un tel estimateur.
On sait que
|
QH,è(t) =
|
dJo
t
dWtH kH(è,
s)a(s) ds.
|
= dWH d Lt
kH(è,s)á((s))ds
+ èdWH
ftkH(è,s)â((s))ds.
t t
= ë1 + èë2.
Alors
logLT(è) = f
T(ë1 + èë2)dZt - 2
JoT (ë1 +
èë2)2dWsH
et l'équation de vraisemblance est donnée par
|
Z0
|
T ë2dZt - fT (ë1 +
èë2)ë2dWsH =
0.
|
Par conséquent, l'estimateur du maximum de vraisemblance
est donné par
.
f0 T ë2(t)dZt
- f0 T
ë1(t)ë2(t)dW
H
àèT = t
f0 T
ë22(t)dWtH
Soit è0 le vrai paramètre. En utilisant le
fait que
Z T
dZ(t) = 0 (ë1(t) +
è0ë2(t))ë2(t)dWH(t)
+ dMH(t).
On montre que
dPèT
dPT
è0
Z T Z T
= exp{(è - è0) 0
ë2(t)dMH(t) - 1
2(è - è0)2 0 ë2
2(t)dWH(t)}.
51
En suivant la représentation de la dérivée
de Randon - Nikodym, on obtient
__ f0
ë2(t)dMH(t)
(àèT - è0)
f0T ë22(t)dWH(t)
Le théorème suivant établit la
consistance forte de l'estimateur du maximum de vraisemblance.
'
Théorème 3.1.2. L
estimateur du maximum de vraisemblance
èN,E est fortement consistant,c'est- à -d
ire, èN,E ? è0 presque surement
[P90] quand T ? 8 en considérant
f0T ë2(t)dWH(t)
? 8 presque surement [P90] quand T ? 8.
3.1.4 Méthode d'estimation Bayésienne
Cette méthode s'impose de plus tant dans les analyses
théoriques qu'empi-
riques
([39],[134],[65],[64],[102],[182],[183],[7],[123],[143],[144],[79],[27],[37],[40],
[156],[52],[125],[59],[158],[163],[160],[108].
On suppose que l'espace du paramètre O est un
ouvert et A une mesure de probabilité a priori sur l'espace
paramétré O. En plus,on suppose que A a la
densité ê() en accord avec la mesure de Lebesgue. La
fonction de densité
est continue et positive dans un ouvert au voisinage de
è0,le vrai paramètre. f T
Soit öT = IT RT = IT 0
ë2(t)dMH(t), t = 0 et
çT = IThRiT =
I2 f0 T ë22(t)dMH(t),
t = 0.
T
L'estimateur du maximum de vraisemblance satisfait la relation
suivante
|
öT = (
|
àèT -
è0)I-1
T çT.
|
La densité de probabilité a posteriori de
è basée sur l'observation XT =
Xs, 0 = t = T est
dPe dPï
p(è|XT) =
dPe ë(è)/ fo dPe
ë(è)dè.
0 0
Soit t = I-1
T (è0 - BT) et nous
définissons
p*(è|XT) =
ITp(àè + tIT|XT).
Alors, la fonction
p*(è|XT) est la densité
de probabilité a posteriori de la
variable transformée t = I-1
T (è0 -
àèT).
52
3.2 Estimation des équations aux
dérivées partielles stochastiques avec dérive
linéaire
Soient U un espace de Hilbert séparable
réel et Q un opérateur auto-adjoint positif. Supposons
que l'opérateur Q est nucléaire [154]. Alors, Q
admet une séquence des valeurs propres {ãn, n
> 0}, 0 < ãn décroissant
à zéro quand n -+ oo et I000
ãn < oo. En plus,les vecteurs propres correspondants
{ín, n > 1} forment une matrice
orthonormée dans U. On définit un mouvement brownien
fractionnel à dimension infinie sur U avec une matrice de
covariance Q comme
00
ùHã (t) =
NhnønWãH(t)
n=0
où WãH(t), n >
0, sont des mouvements browniens fractionnaires avec l'indice de
Hurst(cf.Tindel et al.2003). Soient U = L2[0, 1] et
WãH(t) un mBf à dimension
infinie sur U avec comme indice de Hurst H et l'opérateur de
covariance nucléaire Q. Considérons le processus
duå(t, x) = (Auå(t, x) +
èduå(t, x))dt +
?dWãH(t)
où A = ?2
?x2 .
Supposons que å -+ oo et è E
O c R.Aussi nous supposons que les conditions initiales et
aux limites bornées sont données par
uå(0, x) = f(x), f E
L2[0,1]
uå(t,0) = uå(t,1) = 0, 0
< t < T
Tindel et al.(2003) ont donné les conditions
suffisantes pour l'existence et l'intégrité carrée d'une
solution uå(t, x) pour l'équation
différentielle stochastique conduite par un mouvement brownien
fractionnel à dimension infinie [154].
Nous supposons que les conditions suffisantes soient remplies,
alors il existe une solution carrée intégrable unique
uå(t, x) de [? ] sous les conditions
(3) et (4). Nous considérons cette solution unique comme une somme
suivante
00
uå(t, x) =
uiå(t)íi(x).
i=1
Alors le coefficient de Fourrier uiå(t)
satisfait l'équation différentielle stochastique
duiå(t) = (è -
ëi)uiå(t)dt + ø
v1 + ëidwHi (t), 0 < t
< T,
avec la condition initiale uiå(0) =
õi, uiå = f01
f(x)ãi(x)dx. Soit
P(èå) la mesure
probabilisée générée par
uå quand le vrai paramètre. On suppose que
è0 est le vrai paramètre et
{uiå(t), 0 < t <
T} est un processus de type Urnstein - Uhlenberg fractionnaire [104],
[153]. On définit
MHi(t)= ft
kH(t, s)dWiH(s), 0 <
t < T,
0
Qiå(t) = 1 + ëi d
ft kH(t,
s)uiå(s)ds, t E [0,
1] ø dWtH
1
Ziå(t) = (è -
ëi) f Qiå(s)ds
+ MHi (t),
0
alors il s'en suit que
Z t
uiå(t) = 0
Kfiå
H (t,
s)dZiå(t),
fiå(t) --
ø
et
ü 1 + ëi
alors MHi (t) est une
martingale gaussienne de moyenne nulle. D'après le
théorème de Girsanov - type tiré du livre [154]
|
dP T,å
iè
log T =
dPièô
|
1 + ëi
|
1(è - è0) Jo
Qiå(t)dZi (t)
|
|
ø2
|
?
1
2[(è - ëi)2 -
(è0 - ëi)2] ft
Q2iå(s)dWtH ?
Soit uNå (t, x)
la projection de la solution uå(t, x) dans
le sous - espace engendré par des vecteurs propres {ãi,1
< i < N}. Alors
uNå (t, x) s'écrit
N
uNå (t, x) =
uiå(t)ãi(x).
i=1
De l'indépendance des processus
{WtH, 1 < i < N} et les
séquences des processus {uiå,1 < i
< N},
|
dP T,å
iè
log T =
dPièo
|
N i=1
|
1 + ëi
|
? ?Zt
(è -
è0) 0
Qiå(t)dZiå(t) ?
|
|
ø2
|
53
?
[(è - ëi)2 -
(è0 - ëi)2] ft
Q2iå(s)dWtH ?
54
En plus l'information de Fisher est donnée par
|
alog(k)
IiE(B) =
E9[alog(k)]2 =
N 1 + Xi Eo(fft
Q2å(s)dWtH)
ae aez-i2 Jo
où
On peut vérifier que l'estimateur de maximum de
vraisemblance
|
àeN,å du
|
paramètre e basé sur la projection
uNå de uå est
donné par
PN v1 + Ai R0 t
Qiå(t)dMH i (t)
i=1
àeN,å =
PNi=1(1 + Ai)2 R0 t
Q2iå(t)dWtH
On suppose que e0 est le vrai paramètre. On peut
vérifier que e e = N
v1 + Ai R0t
Qiå(t)dMHi(t)
-1
(àN,E- 0)
PNi=1(1 +Ai)2R0 t Q2
iå(t)dW t H
On observe que Mi,1 = i = N, sont des
martingales gaussiennes indépen-
àeN,å est for-
dantes des moyennes nulles avec hMii =
WH, 1 = i = N.
Théorème 3.2.1. L'estimateur de maximum de
vraisemblance
|
tement consistent, c'est - à - dire,
|
àeN,å ? e0 p.s.
[Pè0] quand e ? 0. sous
|
condition que
N
f
t(Ai +
1)QÉ(s)dWtH = X f
T(Ai +
1)Q2iå(s)dWtH
? 0p.s.[Pè0] quand e ? 0.
o i=0
3.3 Estimation des paramètres
stochastiques
par le filtre stochastique
L'objectif de la théorie de filtre stochastique est
d'estimer les processus stochastiques non observables qui apparaissent dans
plusieurs domaines tels que l'économie, la communication, la finance,
etc.( [98],[141], [18] [181],[? ],[? ] [111],
Bertein et Ceschi (2007), [71] ,[177](2008), [17],[1],[23],
[20],[85],[84],[109],[119],[133],[83],[176],[175],[169],[168],[165], [180],
Bain et Cri-san (2009).
3.3.1 Formulation du modèle d'état - espace
stochastique
Le problème de filtre consiste à estimer la
variable stochastique non observable à partir de deux processus :le
signal est celui l'on veut estimer et
55
le processus observation qui fournit les informations
sur base desquelles les estimations sont faites.
Pour le processus observation Y(t),nous
supposons qu'il est gouverné par l'équation différentielle
stochastique suivante
dXt = ( bt + btXt)dt +
ctdWt + ótdBt, dYt = ( ht +
htXt)dt + dWt,
où X0 est un vecteur aléatoire normale
avec comme moyenne X0 E Rd et la
matrice de covariance P0 E
Rdxd, (Wt, Bt) est un
mouvement Brownien de dimension (m x n) et les coefficients
sont des matrices déterministes de dimensions respectivement de
3.3.2 Filtre stochastique de Kalman - Bucy
Les ouvrages suivants nous ont permis d'élaborer cette
sous - section et peuvent être exploité par les lecteurs
intéressés ([44],[66],[18],[55]). On dérive
les équations pour les processus
-kt et ãt en utilisant l'équation
de filtrage
de Kalman - Bucy [100]. Ces processus sont supposés
être Gaussiens, qui ont les moments de n'importe quel ordre. Pour tout
t > 0 et pour ù E SZ étant
fixé,ðt(ù) est une mesure de
probabilité normale multivariée sur IRd. La
matrice ãt est non aléatoire. En effet,pour 1 <
i, j < d, nous avons ãt =
E(Xi

ij tXj t )-E(
it
jt )
X
X
|
-kt =
|
Z t Z t
àX0 + 0
(bs + bs
àXs)ds + 0
(bs +
ãshs)dvs.
|
L'existence et l'unicité du système
d'équations différentielles stochastiques sont données
respectivement dans les théorèmes suivants.
Théorème 3.3.1. ([177], Le
processus ( Xt, ít) est la solution unique au
système d'équations différentielles stochastiques
(3.20)-(3.21), avec vt étant un processus
brownien de dimension d donné par
t
vt = Yt - f (hs +
hs Xs)ds.
où Xt et ãt représentent respectivement la
moyenne conditionnelle et la ma-
trice covariance conditionnelle de la distribution normale
multivariée corres-
pondant à la mesure aléatoire ðt. En utilisant
le calcul d'Itô
Théorème 3.3.2. ([177],p.163)
Le processus ( àXt,ãt) est une
solution unique
du système des équations stochastiques.
56
Le processus ( Xt,ãt) est appelé le
filtre de Kalman - Bucy pour le modèle d'état - espace
stochastique.
3.3.3 Filtre stochastique optimal
Le Lemme suivant concerne l'estimation de la valeur d'une
variable aléatoire basée sur les informations disponibles
représentées par
Lemme 3.3.2.1. [177.1 Soit ? une variable
aléatoire à carré intégrable dans un espace de
probabilité (S2, F, P). Soit G une
sous - tribu de F , alors
E((? -
E(E(?|G)2)) = min{E((?
- ç)2) : ç E
L2(S2, F, P)}.
Très souvent,on sera intéressé par
quelques quantités qui sont des fonctions du signal en lieu et place du
signal lui - même.
Malgré que E(Xt | Tt) est le
meilleur estimateur de Xt,
f(E(Xt|Tt)) n'est pas le meilleur
estimateur de f(Xt) basé sur le critère des
moindres carrés ordinaires si f n'est pas une fonction
linéaire.
Soit ðt(·) - P(Xt E
· | Tt) la distribution de probabilité conditionnelle
régulière de Xt étant donné Tt
;
à [0, 1] tel que (i)Vù E
S2ðt(·, S2) est une mesure de
probabilité sur une variable aléatoire
l'espérance conditionnelle est donnée par
l'intégrale de f avec la distribution de probabilité
conditionnelle régulière ðt.
Rappelons que Cb(Rd) est
l'ensemble des fonctions bornées et continues sur Rd et
(ðt, f) est l'intégrale de la fonction f
conditionnellement à la mesure u. Le
théorème de Kallianpur - Stiebel est une formule de Bayes
utilisée en théorie de filtre pour calculer l'espérance
conditionnelle en considérant la mesure de probabilité
Pà.
Théorème 3.3.3.
(Théorème de Kallianpur - Stiebel) Le filtre optimal
peut être représenté comme suit
(ðt, f) = (ðt, 1),V)
(ðt,
f E Cb(Rd),
rd =
E(Mtf(Xt)|Tt).
Théorème 3.3.4. [177.1
(Equation de Zakai) Le filtre non normalisé Vt satisfait
l'équation différentielle stochastique suivante :
Z t Z t
(Vt, f) = (V0, f) + 0
(Vs, Lf)ds + 0 (Vs,
V*fc + fh*)dYs
57
où ,Cf = 1 Pd i,j=0 aij?2
ijf + Pd i=0 bi?i, fest le
générateur du processus signal 2
et la matrice A = (aij) est donnée par Ad x d =
CC* + óó*.
3.3.4 Approximation discrète - temporelle du
filtre de Kalman - Bucy
La revue de littérature sur l'approximation des
équations différentielles stochastiques est abondante [95],
[139],[140],[68],[105]. Les méthodes d'approximation les plus couramment
utilisées sont celles de type Taylor telles que les méthodes
d'Euler-Maruyama,de Milstein , de Runge - Kuta, et Crank - Nicolson.
Pour obtenir la solution numérique du filtre de Kalman
- Bucy, nous utilisons la méthode d'Euler au temps t = kä, k =
0,1, 2, · · · , dont les formules récursives
suivantes
àXä(k+1)ä =
àXäkä + (6kä +
bkäàXkä)ä + (ckä +
ãäkähkä)(íä(k+1)ä -
íäkä),
íä(k+1)ä =
íäkä + Y(k+1)ä - Ykä +
(hkä + hkä 50cä), et
ãä(k+1)ä =
ãäkä + (ãäkäbkä +
bkäãkä + akä - (ckä +
ãäkähkä)(ckä +
ãäkähkä).
Théorème 3.3.5
([177],p.165). Supposons que les coefficients
b,b, c et h sont des fonctions lipschitziennes et continues dans t.
Alors, il existe une constante K1 tel que
|
E max | {z }
kä<T
|
|ä ä 2
X(k+1)ä -
Xkä| + max | {z } kä<T
|
|íä(k+1)ä -
íäkä| -- K1ä.
|
3.3.5 Equations de Filtre de Kalman pour les processus
discrets
Plusieurs auteurs ont présenté le filtre de
Kalman [46], [44], [55],[66], [108], [77]. Cependant, le présent
résumé est tiré de (Leondes,p.241). Le modèle
dynamique se présente comme suit
Xk = ök-1Xk-1 + ùk-1,
ùk-1 ^' N(0, Qk-1) et l'équation de
l'état se présente
Zt = HkXk + õk, õk ^' N(0, Rk)
58
les conditions initiales sont
E(X0 -
àX0|0)(X0 -
àX0|0) = P0|0,
E(wkv0j) = 0 pour tous k et j.
àXk|k-1 =
Ok-1àXk-1|k-1
error covariance propagation
Pk|k-1 =
Ok-1Pk-1|k-1(1)0k-1 +
Qk-1
state estimate update
[ ]
àXk|k =
àXk|k-1 + Kk Zk - H
àXk|k-1
error covariance update
[ ]
Pk|k-1 = I - KkHk
Pk|k-1
La matrice de gain de Kalman gain est donnée par
Kk = Pk|k-1Hk
[HkPk|k-1H0k + Rk] -1
59
Chapitre 4
Applications aux processus
stochastiques temporels
Dans ce chapitre il sera question d'appliquer les
théoriques des équations et intégrales stochastiques
à la macroéconométrie. Les travaux relatifs aux
applications du calcul stochastique en économie en général
et en économétrie en particulier sont abondants et
récents. Nous pouvons citer à titre illustratif le modèle
Black - Scholes [33] qui a permis à ses auteurs Robert C.Merton et Myron
S. Scholes de remporter le prix Nobel en économie en 1997.
L'objectif de ce chapitre est d'appliquer ces techniques et
méthodes de modélisation macroéconométrique aux
données congolaises.
4.1 Revue empirique sur la modélisation stochastique
Dans cette section nous présentons en
résumé quelques modèles empiriques
développés par certains auteurs mentionnés dans .
60
4.1.1 Modèle de Bachelier
Bachelier [15] a modélisé le prix des options
européennes qui se présente sous forme d'équation
différentielle stochastique suivante :
dXt = /3dt + udWt
où Wt est un processus gaussien avec une moyenne
nulle et une variance t, c'est - à - dire une martingale.La faiblesse de
cette formulation est que le prix peut être négatif [93].
4.1.2 Modèle de Black - Scholes
dXt = /3Xtdt + uXtdWt
4.1.3 Modèle de Cox - Intgersoll -
Ross
Le modèle Cox - Ingersoll - Ross [47] est utilisé
en mathématique financière pour modéliser
l'évolution des taux d'intérêt de court terme. Il s'agit
de la solution de l'équation différentielle
stochastique
/
dr(t) = k( - r(t))dt + u (r(t))dW (t), r(0) =
r0,
où k, , u sont des constantes et W(t)
est un mouvement brownien standard au temps t [41].
4.1.4 Modèle de Heath - Jarrow - Morton
Heart, Jarrow et Morton (1992) ont supposé pour une
maturité fixe T le taux instantané f(t, T) sous
une mesure donnée, suit un processus de diffusion
df(t, T) = á(t, T)dt + u(t, T)dW(t),
f(t,T) = fM(0,T),
avec T -~ fM(0, T) est fonction
instantanée au temps t = 0, et où W = (W1, ..., WN)
est un mouvement brownien de N dimension, u(t, T) = (u1(t, T), ...,
uN(t, T)) est un vecteur des processus adaptés et á(t,
T) est aussi un processus adapté.
4.1.5 Modèle de Vasicek
Le modèle de Vasicek est un modèle
mathématique qui tire son nom Vasicek (1977) suppose que le taux de spot
instantané suivait un processus d'Ornstein - Uhlenberg avec coefficients
constants [38]. Ce modèle se présente comme suit :
dr(t) = k[3 - r(t)]dt + udW(t), r(0) = r0,
où r0, k,3 et u sont
des constantes positives .
4.1.6 Modèle de Black - Karasinski
Le modèle de Black - Karasinski [32] est un
modèle mathématique appliqué en mathématiques de
finance. Black et Karasinski (1991) ont modélisé le comportement
du taux d'intérêt d'un titre conduit par le processus suivant :
d[Logr(t)] = (á(t) - 3(t)Logr(t)]dt +
u(t)dW(t), r(0) = r0, (4.1)
où r(0) est une constante positive et
á(t), 3(t) et u(t) sont des fonctions
déterministes du temps. Aussi dW(t) est un mouvement brownien
standard.
4.1.7 Modèle de Hull - While
Hull et White (1990) suppose que le processus du taux de cout
terme instantané sous le mesure de risque neutre se présente
comme suit :
dr(t) = [e(t) + 3(t)r(t)]dt + u(t)X0.5
t dWt (4.2)
où , 3 et u sont des fonctions
déterministes du temps [38].
4.1.8 Modèle de Aït - Sahalia
dXt = (á + 3Xt + 'yX-1 t + 8X2
t )dt + uXã t dWt
61
62
4.2 Estimation des paramètres de
l'équation différentielle stochastique de l'inflation
Avant tout, estimer un paramètre c'est donner une
valeur approchée de ce paramètre à partir des
résultats obtenus sur un échantillon aléatoire extrait de
la population (Veysseyre,p.210).
4.2.1 Présentation théorique de
l'inflation
Par définition, l'inflation est l'augmentation du
niveau général des prix [35]. Algébriquement, on a
ðt = /-(log(Pt)) = log(Pt+1) - log(Pt)
où log est le logarithme naturel et Pt
est l'indice général des prix. Le taux d'inflation mesure la
vitesse avec laquelle les prix augmentent[132].La mesure de l'inflation elle -
même n'est pas exempte de difficultés. On adopte en
général le point de vue du consommateur : l'indice de prix
à la consommation (IPC) mesure le prix d'un panier de biens
représentatif de la consommation des ménages [35]. L'un des
avantages de l'indice des prix à la consommation prend en compte l'effet
du taux de change sur le prix intérieur des importations [35]. Pourquoi
l'inflation suscite - t elle un problème social? Les différents
coûts de l'inflation sont perdus selon qu'il s'agit de l'inflation
anticipée ou non ou encore s'il s'agit de la situation plus grave de
l'hyperinflation.
Les coûts de l'inflation anticipée sont (i) la
taxe d'inflation perçue sur la quantité de monnaie détenue
par les agents,(ii) le coût de menu qui s'explique par l'obligation dans
laquelle se trouvent les entreprises de modifier plus souvent leurs listes de
prix. Changer les prix implique des couts d'impression et de distribution d'une
nouvelle liste de prix ou d'un nouveau catalogue,(iii) le coût dû
à la variabilité des prix relatifs, (iv) le cout de l'inflation
est suscité par les législations fiscales. De nombreux articles
du code fiscal ignorent les impacts de l'inflation.(v) le coût de
l'inflation provient du fait qu'il est plus inconfortable de vivre dans un
monde où les prix fluctuent que dans un monde où les prix sont
stables. L'inflation rend plus difficile la planification financière
individuelle.
L'impact de l'inflation non anticipée est plus
pernicieux qu'aucun des couts de l'inflation anticipée stable : (i) elle
redistribue de manière arbitraire la richesse entre les gens,(ii) elle
pénalise les personnes vivant de revenus
63
fixes, tels que les pensions de retraite.Plus le taux
d'inflation est variable, plus grande est l'incertitude à laquelle sont
confrontés tant les préteurs que les emprunteurs.
Les coûts de l'inflation augmentent
considérablement en période d'hyperin-flation. Certes,
l'hyperinflation accélérée le processus de dollarisation
(circulation de devises étrangères) de l' économie
nationale.
Empiriquement, Bruno et Easterly (1996) ont trouvé que
la croissance était affectée par une inflation supérieure
à un chiffre de 20 % à 40 % par an. Barro (1997) chiffre entre
0,3 % à 0,4 % point la perte de croissance induite par un
supplément d'inflation de 10 points, tout en admettant que ce
résultat est surtout vrai pour les inflations élevées
([35],p.221).
Quelle est la source de l'inflation? En se basant sur la
théorie quantitative de la monnaie, relation mathématique entre
la quantité de monnaie et les prix, les économistes disent que
l'inflation est toujours d'origine monétaire ([174], [132] ). En
conséquence, la théorie quantitative de la monnaie établit
que la banque centrale, qui contrôle l'offre de monnaie, contrôle
du même fait , en dernier ressort, le taux d'inflation. Si la banque
centrale préserve la stabilité de l'offre de monnaie, le niveau
des prix sera également stable. Si la banque centrale accroit rapidement
le stock de monnaie, le niveau des prix augmentera lui aussi rapidement
([132],p.195).
4.2.2 Présentation du modèle
économétrique
Nous supposons que l'inflation kinoise,calculée
à partir de l'indice de prix à la consommation observé
dans la Ville Province de Kinshasa,peut être modélisée
comme suit
Z t Z t
irt = ir0 + e 0
irsds + u 0 dBs
(4.3)
où et u sont des paramètres à
estimer appelés respectivementdrift et diffusion et B
est un processus brownien. u peut être
interprété comme la volatilité stochastique du
phénomène sous analyse.
Cette équation intégrale stochastique peut se
présenter en équation différentielle stochastique
suivante
dirt = eirtdt + udBt. (4.4)
64
Après quelques manipulations algébriques, cette
équation se présente comme un processus auto - régressif
d'ordre 1 ci-après :
ðt - ðt_1 = èðt_1 +
ó(Bt - Bt_1), ðt = (1 +
è)ðt_1 + ó(Bt
- Bt_1), ðt = ?ðt_1 + åt,
å ~ iid(0, ó2
å),
où ? = (1 + è), åt
= ó(Bt - Bt_1).
L'abréviation iid signifie la variable
aléatoire est indépendante et identiquement distribuée.
Pour assurer la stabilité du processus markovien, on suppose que
|?| < 1. Le paramètre ? mesure la
persistance de l'inflation kinoise. L'hypothèse å ~
iid(0, ó2 å)
signifie que la variable aléatoire, terme d'erreurs, suit une
distribution normale de moyenne nulle et de variance constante
(ó2å).
Cependant, cette hypothèse
d'homoscédasticité (la constance de la variance des erreurs) peut
ne pas être vraie dans la réalité dans ce cas on parle dans
la littérature économétrique de la présence
d'hétéroscédasticité ([72],
[70],[80],[57],[78]).
Dans le cas de cette étude, pour de raison de
simplicité et de limite observée du développement
théorique, on se limite à l'hypothèse
d'homoscédasticité.
4.2.3 Estimation du processus stochastique
autorégres-sif d'ordre 1
En économétrie,les méthodes de maximum de
vraisemblance et des moindres carrés ordinaires sont couramment
utilisées pour estimer le paramètre è du
modèle AR(1) susmentionné [70].
Pour estimer ce paramètre nous supposons que
l'inflation est un processus faiblement stationnaire,c'est- à -dire,ses
moments d'ordre 1 et 2 ne varient pas avec le temps,i.e.,
E(åt|ðt) = 0. Dans cette étude, la
méthode des moindres carrés ordinaire a été
utilisée pour estimer les deux coefficients. Ce choix est fait à
cause de la simplicité de son langage mathématique et sa mise en
pratique. La formulation mathématique du principe de la méthode
de moindres carrés ordinaires est la minimisation de la somme des
carrés des er-reurs.Par conséquent, l'estimateur des moindres
carrés ordinaires. Nous supposons aussi que l'estimateur des moindres
carrés ordinaires est le meilleur estimateur linéaire non
biaisé (Best Linear Estimator Unbiased).
65
4.2.4 Résultats des estimations
Nous avons utilisé l'indice des prix à la
consommation (IPC) calculé par la Banque Centrale du Congo
observé à Kinshasa pour la période allant de janvier 2004
à avril 2016. Pour obtenir l'inflation,nous avons transformé
cette variable en log-différentiel,i.e,
tt =A (log(IPC)t) = logYt
- logYt_1. Pour le modèle AR(1), les
résultats se présentent comme suit
àðt = 0, 54irt_1, T
= 146,
t - Student = 7,71, DW =
2, 19,
où T représente la taille de
l'échantillon, t - Student est la statistique de
Student pour tester la significativité des paramètres
estimés et DW représente la statistique de Durbin et
Watson pour tester l'absence d'auto-corrélation des erreurs du
modèle estimé.
t t
Après l'estimation de notre modèle AR(1),
l'équation intégrale stochastique de l'inflation de Kinshasa se
présente comme suit
Z Z
àðt = ir0 + 0, 46
0 irsds + 0, 02 0
dBs.
Comme la statistique de t-student du coefficient
estimé est supérieure à 2, en valeur absolue ,selon la
règle de pouce,nous pouvons conclure que ce paramètre
estimé t9 à est significatif,c'est- à -dire,ce
paramètre est statistiquement différent de zéro. Aussi
comme la valeur estimée de la statistique de Durbin - Watson est au tour
de 2, nous concluons qu'il y a absence d'autocorré-lation des erreurs
dans le modèle AR(1) estimé. La valeur de la volatilité
stochastique est de 0,02 qui montre sous la période sous analyse une
faible présence d'incertitude. La persistance à la hausse de
l'inflation de Kinshasa est de 54%,c'est-à -dire,l'inflation du mois
passé contribue de 54% à l'inflation présente .
4.3 Estimation de la contribution stochastique de la main
d'oeuvre congolais sur son bien - être économique
Connaitre les contributions de différentes variables
explicatives du développement économique de sa population est une
préoccupation majeure de tout décideur ou le planificateur du
développement économique. Le filtre de Kalman - Bucy est reconnu
comme l'une des techniques couramment utilisées dans les domaines de
navigation, contrôle, de lancement de missiles et navettes spatiales,
analyse de processus de signaux médicaux, etc.
([77],[53],[46],[103],[81],[? ],[161],[13],[129],[131]). La
portée de cette technique ne s'est pas limitée uniquement dans
ces domaines mais aussi elle est utilisée en
macroéconométrie pour estimer les composantes non observables
stochastiques des agrégats macroéconomiques ([73], [75],
[76],[74] ).
4.3.1 Modèle théorique du bien - être
économique
L'analyse théorique des effets des facteurs de
production (travail, capital et la technologique) est plus ancienne et
constitue la préoccupation des économistes théoriciens et
des décideurs politiques en charge de la bonne conduite de la politique
économique du pays.
Nous supposons que la fonction de production de bien
4.3.2 Spécification économétrique
du modèle état - espace du développement
économique
Nous supposons que le modèle d'état - espace du
bien - être congolais se présente comme suit :
le processus d'observation
|
gt = à131,txt +
|
à132,tyt +
|
ài3,tZt + [var =
exp(
|
àe1)]
|
avec les processus stochastiques non observés
d'états suivants
|
àâ1,t =
|
à/1,t-1 + [var =
exp(
|
àe2)],
|
|
àâ2,t =
|
àe4 +
à/32,t-1 + [var =
exp(àe3)],
|
66
à/33,t =
àe5 +
à/33,t-1,
à
où /3j,t mesurent les effets de ces
trois différents facteurs de bien - être congolaise au temps t
et àBi sont les paramètres
constants du modèle état - espace stochastique.
Les hypothèses du modèle sont (i) les
séquences vt et Ek,t sont des bruits
Gaussiens,(ii) les coefficients sont des processus stochastiques et
variants avec le temps.
4.3.3 Estimation du modèle de bien - être
congolais
Il y a deux avantages de présenter un système
dynamique dans le modèle d'état - espace : (i) le modèle
d'état espace permet aux variables non observables (variables
d'état) d'être incorporées et estimées dans le
modèle observé, (ii) les modèles d'état espace
peuvent être analysés en utilisant l'algorithme récursif
puissant comme le filtre de Kalman et Bucy [99] et [100], (iii) E[vtEk,t] =
0, .

Pour implémenter le filtre de Kalman, nous appliquons
la fonction de maximum de vraisemblance suivante
2 Log(2r) - 2 Log
Ft(B)
1
|
|-
2 ~-1
t (è)~t(è).
t t
Cette fonction peut être évaluée en
utilisant le filtre de Kalman. En utilisant les dérivées
numériques, les techniques itératives standards peuvent
être employées pour maximiser la fonction de maximum de
vraisemblance des paramètres inconnus. Dans cette étude la
technique itérative utilisée est celle de Berndt, Hall,Hall et
Hausman [? ].
L'algorithme de BHHH [? ] est une
méthode numérique similaire à celle de Gauss - Newton.
Elle se présente comme suit. Supposons que la fonction à
optimiser est Q(/3). Alors les algorithmes sont itératifs
définissant une suite d'approximation, /3k, donnée
par
?Q
/3k+1 = /3k - ëkAk a/3 (/3k)
où /3k est le paramètre à
estimer à l'étape k, et Ak est une
paramètre appelé la taille de l'étape qui partiellement
détermine l'algorithme particulier. Pour l'algorithme BHHH de Ak
par les calculs avec une étape donnée est
déterminé L 'Algorithme de Kalman que nous avons utilisé
peut être résumé comme suit
LogL(/3) = -
nT
67
68
(Leondes,p.241). Le modèle dynamique se présente
comme suit
Xk = Ok-1Xk-1 + Wk-1,
Wk-1 ^' N(0, Qk-1)
et l'équation de l'état se présente
Zt = HkXk + vk, vk ^'
N(0, Rk)
|
les conditions initiales sont
|
E(X0) =
|
àX0|0,
|
E(X0 -
àX0|0)(X0 -
àX0|0) = P0|0,
E(Wkv0j) = 0 pour tous k et
j.
àXk|k-1 =
Ok-1àXk-1|k-1
La matrice de covariance des erreurs de propagation est
donnée par
Pk|k-1 =
Ok-1Pk-1|k-1(P0k-1 +
Qk-1
Le vecteur état
[ ]
àXk|k =
àXk|k-1 + Kk Zk - H
àXk|k-1
|
Matrice de covariance des erreurs est donnée
[ ]
Pk|k-1 = I - KkHk
Pk|k-1
La matrice de gain de Kalman est donnée par
Kk = Pk|k-114
[HkPk|k-1H
0k + Rk]
|
-1
|
4.3.4 Présentation et Interprétation des
résultats
Les résultats de cette étude sont
présentés dans le tableau suivant :
69
Paramètres du modèle valeurs estimées
àè1
-3,3867*
àè2 -16, 2692
àè3 -6, 4230
àè4 1,2807
àè5 -0,
0081**
Etats du modèle valeurs estimées
àâ1
-0,3634**
àâ2 49,
6594*
àâ3 0, 2352
(*) et (**) sont respectivement significatifs au seuil de 5% et
10%.
Comme indiqué dans le tableau ci - dessus, la
significativité des paramètres de ce modèle est
déterminée par la valeur de Z - statistique associée
à chaque paramètre. La lecture de ce tableau montre que les
coefficients de variables investissements et populations sont significatifs.
Eu égard à ces estimations, la population active
congolaise ont des effets positifs sur la croissance économique. Par
contre, les investissements ont des
effets négatifs sur la croissance économique.
Conclusion
La modélisation d'une économie gouvernée
par les phénomènes aléatoires conduit aux mauvaises
prévisions rendant certainement les politiques économiques
inefficaces.
70
Bibliographie
[1] N. U. Ahmed. Linear and Nonlinear Filtering for
Scientists and Engineers. World Scientific, Singapore, 1998.
[2] Y. Ait Sahalia. Testing continuous - time models of the
spot interst rate. Review of Financial Studies, 9 :385 - 426, 1996.
[3] Y. Ait Sahalia. Transition densities for interest rates
and other nonlinear diffusions. Journal of Finance, 54 :499 - 547,
1999.
[4] Y. Ait Sahalia. Maximum likelihood estimation of
discretely sampled diffusions : A closed - form approximation approach.
Econometrica, 70 :223 - 262, 2002.
[5] Y. Ait-Sahalia, Lars P. Hansen, and Jose A. Scheinkman.
Operator Methods for Continuous-Time Markov Processes, volume Handbook
of Financial Econometrics : Tools and Techniques. Elsevier, North Holland,
2010.
[6] Y. Ait Sahalia and Robert Kimmel. Maximum likelihood
estimation of stochastic volatility models. Journal of Financial Economics,
83 :413 - 452, 2007.
[7] J. Albert. Bayesian Computation with R. John
Wiley and Sons, New York, 2 edition, 2009.
[8] S. Albeverio, R. Fan, and F. Herzberg. Hyperfinite
Dirichlet Forms and Stochastic Processes. Verlag. Springer, Berlin and
Heidenlberg, 2011.
[9] R. Aldrovandi. Special Matrices of Mathematical
Physics Sochas-tic,Circulant and Bell Matrices. World Scientific, Danvers,
2001.
[10] E. Allen. Modeling with Ito Stochastic Differential
Equation. Springer, 2007.
[11]
71
T. Amemiya. Advanced Econometrics. Harvard University
Press, Cambridge, 1985.
[12] D. Applebaum. Lévy Processes and Stochastic
Calculus. Cambridge University Press, Cambridge, 2 edition, 2009.
[13] D. Ardia. Financial Risk Management with Bayesian
Estimation of GARCH Models Theory and Applications. Verlag. Springer,
Berlin, 2008.
[14] G. Aubert and P. Kornprobst. Mathematical Problems
in Image Processing Partial Differential Equations and the Calculus of
Variations. Springer Science + Business Media, New York, 2 edition,
2006.
[15] L. Bachelier. Théorie de la
spéculation. PhD thesis, Ecole Normale Supérieure de Paris,
Paris, mars 1900.
[16] J. Bai. Testing for parameter constancy in linear
regressions : An empirical distribution function approach. Econometrica,
64(3) :597 - 622, May 996.
[17] Z. Bai, Y. Chen, and Y. C. Lian. Random Matrix
Theory and Its Applications. World Scientific, Danvers, 2009.
[18] A. V. Balakrishnan. Kalman Filtering Theory.
Optimization Software, New York, 1984.
[19] Y. Bard. Nonlinear Parameter Estimation.
Academic Press, New York, 1974.
[20] H. Bart, I. Gohberg, M.A. Kaashoek, and A.C.M. Ran.
A State Space Approach to Canonical Factorization with Applications.
Birkhauser, Basel, 2007.
[21] I. V. Basawa, C.C. Heyde, and R.L. Taylor, editors.
Seleted Proceedings of the symposium on Inference for Stochastic Processes,
volume 37. Institute of Mathematical Statistics, 2001.
[22] Ishwar V. Basawa and B.L.S. Prakasa Rao. Statistical
Inference for Stochastic Processes. Acedemic Press, London, 1980.
[23] M. Basin. New Trends in Optimal Filtering and
Control for Polynomial and Time - Delay Systems. Number 380. Springer -
Verlag, Berlin and Heidelberg, 2008.
[24]
72
H. Bauer and Robert B.Burkel. Measure and Integral.
Wlter de Gruy-ter, Berlin, 2001.
[25] Peter H. Baxendale and Sergey V. Lototsky.
Stochastic Differential Equations: Theory and Applications, volume 2
of Interdisciplinary Mathematical Sciences. Danvers, 2007.
[26] F. E. Benth, G. Di Nunno, and T.Zhang T. Lindstrom, B.
Oksental, editors. Stochastic Analysis and Applications, Berlin and
Heidelberg, 2007. The Abel Symposia and The Norwegian Mthematical Society,
Springer - Verla.
[27] James O. Berger. Statistical Decision Theory and
Bayesian Analysis. Springer-Verlag, New York, 2 edition, 1985.
[28] N. Berglund. Martingales et calcul stochastique. Master
2,Université d'Orléans, 2014.
[29] P. Billingsley. Weak Convergence of Measures :
Applications in Probability. SIAM, Philadelphia, 1971.
[30] P. Billingsley. Convergence of Probability Measures.
John Wiley and Sons, Danvers, 2 edition, 1999.
[31] Jaya P.N. Bishwal. Parameter Estimation in
Stochastic Differential Equations. Springer - Verlag, New York, 2008.
[32] F. Black and P. Karasinski. Bond and option pricing when
short rates are lognormal. Financial Analysts Journal, pages 52 - 59,
1991.
[33] F. Black and M. Scholes. The pricing of options and
corporate liabilities. The Journal of Political Economy, 81(3) :637 -
654, 1973.
[34] P. Blanchard, P. Combe, and W. Zheng. Mathematical
and Physical Aspects of Stochastic Mechanics. Springer Verlag, Berlin and
Heidelberg, 1987.
[35] A. Bénassy Quéré, B. Coeuré, P.
Jacquet, and J.Pisani Ferry. Politique économique. De Boeck and
Larcier, Bruxelles, 2004.
[36] T. Bollerslev. A conditional heteroskedastic time series
model for speculative prices and rates of return. The Review of Economics
and Statistics, 69(3) :542 - 547, 1987.
[37]
73
Larry G. Bretthorst. Bayesian Spectrum Analysis and
Parameter Estimation. Springer - Verlag, Heidelberg, 1988.
[38] D. Brigo and F. Mercurio. Interest Rate Models
Theory and Practice with Smile, Inflation and Credit. Springer - Verlag,
Berlin and Heidelberg, 2006.
[39] James V. Candy. Bayesian Signal Processing
Classical,Modern and Particle Filtering Methods. John Wiley and Sons,
Hoboken, 2009.
[40] Bradley P. Carlin and Thomas A. Louis. Bayesian
Methods for Data Analysis. Taylor and Francis Group,LLC, Boca Raton, 3
edition, 2009.
[41] René A. Carmona and Michael R. Tehranchi.
Interest Rate Models an Infinite Dimensional Stochastic Analysis
Perspective. Springer, Berlin and Heidelberg, 2006.
[42] M. Carrasco, Liang Hu, and Werner Ploberger. Optimal
test for markov switching parameters. Econometrica, 82(2) :765 - 784,
March 2014.
[43] J.A. Chao and W.A. Woyczynski. Martingales Theory in
Harmonic Analysis and Banach Spaces. Springer Verlag, Berlin, 1982.
[44] C.K. Chui and G. Chen. Kalman Filtering with Real -
Time Applications. Springer, Berlin Heidelberg, 4 edition, 2009.
[45] K. L. Chung and John B. Walsh. Markov Processes,
Brownian Motion, and Time Symmetry. Springer, Berlin, 2005.
[46] Jacques J.F. Commandeur and S. Jan Koopman. An
introduction to State Space Time Series Analysis Practical Econometrics.
Oxford University Press, Oxford, 2007.
[47] J.C. Cox, J.E. Ingersoll, and S..A. Ross. Atheory of the
term structure of interest rates. Econometrica, 53 :385 - 405,
1985.
[48] Jan S. Cramer. Econometric Application of Maximum
Likelihood Methods. Cambridge University Press, New York, 1986.
[49] S. Cyganowski, P. Kloeden, and J. Ombach. From
Elementary Probability to Stochastic Differential Equations with MAPLE.
Springer - Verlag, Berlin and Heidelberg, 2002.
[50] G. Da Prato and L. Tubaro. Stochastic Differential
Equations and Applications - VII, volume 245 of Lecture Note in Pure
and Applied Mathematics. Chapman and Hall/CRC, Boca Raton, 2006.
[51]
74
A. P. Dempster, N.M. Lair, and D.B. Rubin. Maximum likelihood
from incomplete data via the em algorithm. Journal of the Royal Statistical
Society, 39(1) :1 - 39, 1977.
[52] Dipak K. Dey and C.R.Rao. Bayesian Thinking
Modeling, volume 25 of Handbook of Statistics. Elsevier B.V.,
2005.
[53] J. Durbin and S.J. Koopman. Time Series Analysis by
State Space Methods. Oxford University Press, Oxford, 2004.
[54] D. Durrett. Probability Theory and Examples.
Cambridge University Press, New York, 4 edition, 2010.
[55] G. Evensen. Data Assimilation the ensemble Kalman
Filter. Springer, Berlin and Heidelberg, 2 edition, 2009.
[56] A. Foata and A. Fuchs. Processus Stochastique
Processus de Poisson, chaine de Markov et martingales. Dunod, Paris,
2004.
[57] C. Francq and J. M. Zakoian. GARCH Models
Structure,Statistical inference and Financial Application. John Wiley and
Sons, West Sussex, 1 edition, 2010.
[58] A. Friedman. Stochastic Differential Equations and
Applications. Academic Press, 1975.
[59] D. Gamerman and H.F. Lopes. Markov Chains Monte
Carlo Stochastic Simulation for Bayesian inference. Taylor and Francis
Group, Boca Raton,FL, 2 edition, 2006.
[60] J. Gatheral. The Volatility Surface A practtioner's
Guide. Wiley Finance, Hoboken, 2006.
[61] L. Gawarecki and V. Mandrekar. Stochastic
Differential Equations in Infinite Dimensions with Applications to Stochastic
Partial Differential Equations. Springer Verlag, Berlin and Heidelberg,
2011.
[62] L. Gawarecki and V.Mandrekar. Stochastic
Differential Equations in Infinite Dimensions. Springer, Berlin, 2011.
[63] S. Geisser and W. Johnson. Modes of Parametric
Statistical Inference. John Wiley and Sons, Hoboken, New Jersey, 2006.
[64] A. Gelman, John B. Carlin, Hal S. Stein, and Dolnald
B.Rubin. Baye-sian Data Analysis. Chapman and Hall/CRC, Boca Raton, 2
edition, 2004.
[65]
75
A. Gelman and Xiao Li Meng. Applied Bayesian Modeling and
Causal Inference from Incomplete - Data Perspectives. John Wiley and Sons,
Hoboken, 2004.
[66] Bruce P. Gibbs. Advanced Kalman Filtering Least -
Squares and Modeling a Practical Handbook. John Wiley and Sons, Hoboken,
2011.
[67] G. Gong and W. Semmler. Stochastic Dynamic
Macroeconomics : Theory, Numerics and Empirical Evidence. Oxford
University Press, New York, 2006.
[68] C. Graham and D. Talay. Stochastic Simulation and
Monte Carlo Methods. Springer - Verlag, Berlin and Heidelberg, 2013.
[69] W. Greene and R. Carter Hill. Maximum Simulated
Likelihood Methods and Applications, volume 26 of Advances in
Econometrics. Emerald Group, Howard House, 2010.
[70] William H. Greene. Econometric Analysis.
Pearson Education, Upper Saddle River, 5 edition, 2003.
[71] Mohinders S. Grewal and Agnus P. Andrews. Kalman
Filtering : Theory and Practice using MATLAB. John Wiley and Sons, New
York, 2 edition, 2001.
[72] Damodar N. Gujarati. Basic Econometrics. The
McGraw - Hill, 4 edition, 2005.
[73] James D. Hamilton. A new approach to the economic
analysis of nons-tationary time series and business cycle. Econometrica,
57(2) :357 - 384, March 1989.
[74] James D. Hamilton. Handbook of Econometrics,
volume IV, chapter State Space Models, pages 3041 - 3068. Elvier Science
B.V., 1994.
[75] James D. Hamilton. Time Series Analysis.
Princeton University Press, Princeton, 1994.
[76] James D. Hamilton and Baldev Raj, editors. Advances
in Markov Switching Models. Springer, Berlin and Heidelberg, 2002.
[77] A. Harvey, S. J. Koopman, and N.Shephard. State
Space and Unobserved component models : Theory and Applications. Cambridge
University Press, Cambridge, 2004.
[78]
76
Andrew C. Harvey. Dynamic Models for Volatility and Heavy
Tails with Applications to Financial and Economic Time Series. Econometric
Society Monographs. Cambridge University Press, New York, 2013.
[79] Anton J. Haug. Bayesian Estimation and Tracking : A
Practical Guide. John Wiley and Sons, Hoboken, 2012.
[80] F. Hayashi. Econometrics. Princeton University
Press, Princeton, 2000.
[81] James J. Heckman and Edward E. Leamer, editors.
Handbook of Econometrics, volume 6A. North - Holland Elsevier,
Amsterdam, 2007.
[82] D. Henderson and P. Plaschko. Stochastic
Differential Equations in Science and Engineering. World Scientific
Publishing Co.Pte.Ltd, New Jersey, 2006.
[83] D. Hinrichsen and Pritchard A.J. Mathematical
Systems Theory I : Modelling, State Space Analysis Stability and Robustness.
Springer-Verlag, Berlin and Heidelberg, 2005.
[84] S. L. Hobbs and S.S. Sritharan. Nonlinear filtering
theory for stochastic reactiond - iffusion equations. In N. Gretsky,
J.Goldstein, and J. J. Uhl, editors, Probability and Modern Analysis,
pages 219 - 234. Marcel Dekker, 1997.
[85] Rob J. Hyndman, Anne B. Koetler, J.Keith Ord, and Ralph
D. Snyder. Forecasting with Exponential Smoothing: The State Space Control
Systems. Springer- Verlag, Berlin, 2008.
[86] I. A. Ibragimov and R.Z. Hasminskii. Statistical
Estimation Asymptotic Theory. Springer Science + Business Media, New York,
1981.
[87] N. Ikeda and S. Watanabe. Stochastic Differential
Equations and Diffusion Processes. North - Holland Publishing Company.
Kodansha Scientific Books, New York, 2 edition.
[88] K. Itô. Foundations of stochastic differential
equations in infinity dimensional space. volume 47, Philadelphia, 1984.
Conference Board of the Mathematical Sciences and National Science Foundation,
Society for Industrial and Applied Mathematics.
[89] K. Itô and Henry P. McKean Jr. Diffusion
Processus and their Sample Paths. Springer - Verlag, Berlin and
Heidelberg, 1996.
[90]
77
J. Jacob and Philip E. Protter. Discretization of Processes.
Springer - Verlag, Berlin and Heidelberg, 2012.
[91] P. N. Jaya and N.Bishwal. Parameter Estimation in
Stochastic Differential Equations. Springer - Verlag, Berlin and
Heidelberg, 2008.
[92] Andrew H. Jazwinski. Stochastic Processses and
Filtering Theory. Academic Press, New York, 1970.
[93] M. JeanBlanc. Lectures on mathematical finance. City
University, Hong Kong, June 2001.
[94] F. Jedrzejewski. Modèles aléatoires et
physique probabiliste. Springer - Verlag France, 2009.
[95] A. Jentzen and Peter E. Kloeden. Taylor Approximations
for Stochastic Partial Differential Equations. The Society for Industrial
and Applied Mathematics, Philadelphia, 2011.
[96] Nicholas P. Jewell and John d. Kalbfleisch. Maximum
likelihood estimation of ordered multinomial parameters. Biostatistics,
5(2) :291 - 306, 2004.
[97] P. Kall and J. Mayer. Stochastic linear Programming.
Kluwer Academic Publishers, New York, 2005.
[98] G. Kallianpur and D. Kolzow. Measure Theory
Applications to Stochastic Analysis. Springer Verlag, Berlin and
Heidelberg, 1978.
[99] R. E. Kalman. A new approach to linear filtering and
prediction problems. Journal of Basic Engineering, 82 :35 - 45,
1960.
[100] R. E. Kalman and R.S.Bucy. New results in linear
filtering and prediction theory. Journal of Basic Engineering, pages
95 - 108, 1961.
[101] I. Karatzas and Steven E.Shreve. Brownian Motion
and Stochastic Calculus. Springer - Verlag, Berlin and Heidelberg,
1988.
[102] D. Kelly and Curtis Smith. Bayesian Inference for
Probabilistic Risk Assessment : A Practitioner's Guidebook. Springer
Verlag London, London, 2011.
[103] Lawrence R. Klein, A. Welfe, and W. Welfe.
Principles of Macroeco-nometric Modeling. Elsevier Science B.V.,
Amsterdam, 1999.
[104]
78
M. Kleptsyna and A. LeBreton. Statistical analysis of the
ornstein - uhlenbeck type process. Statistical Inference for Stochastic
Processes, 5(3) :229 - 248, 2002.
[105] Peter E. Kloeden and E. Platen. Numerical Solution
of Stochastic Differential Equations. Springer, Berlin, 1995.
[106] Peter E. Kloeden and E. Platen. Numerical Solution
of Stochastic Differential Equations, volume 23 of Application of
Mathematics. Springer - Verlag, Berlin and Heidelberg, corrected third
printing edition, 1999.
[107] Vassili N. Kolokoltsov. Nonlinear Markov processes
and Kinetic Equations. Cambridge University Press, New York, 2010.
[108] G. Koop, Dale J. Poitier, and Justin L. Tobias.
Bayesian Econometric Methods. Cambridge University Press, Cambridge,
2007.
[109] V. Krishnan. Nonlinear Filtering and Smoothing : an
Introduction to martingales, stochastic integrals and Estimation. Dover
Publications Inc., Mineola, 1984.
[110] U. Kuckler and Michael Sorensen. Exponential
Families of Stochastic Processes. Springer Verlag, New York, 1997.
[111] H. H. Kuo. Introduction to Stochastic Integrals.
Universitext. Springer Science Business, New York, 2006.
[112] Harold J. Kushner. Approximaion and weak
convergence Methods for Random Processes with Applications to Stochastic
Systems Theory. The MIT Press, Cambridge, 1984.
[113] Harold J. Kushner and P.Dupuis. Numerical Methods
for Stochastic Control Problems in Continuous Time. Springer-Verlag,
2001.
[114] Harold J. Kushner and G.George Yin. Stochastic
Approximation and Recursive Algorithms and Applications. Springer -
Verlag, New York, 2003.
[115] Yu.A. Kutoyants. Estimation of the trend parameter of a
diffusion process. Theory Probability and its Applications, 22 :399 -
405, 1977.
[116] Yury A. Kutoyants. Statistical Inference for
Spatial Poisson Processes. Springer Science+Busmess Media, New York,
1998.
[117]
79
Yury A. Kutoyants. Statistical Inference for ergodic
Diffusion Processes. Springer - Verlag, London, 2004.
[118] L. Le Cam. Asymptotic Methods in Statistical
Decision Theory. Springer - Verlag, New York, 1986.
[119] K. A. Lee, W.-S. Gan, and Sen M. Kuo. Subband
Adaptive Filtering Theory and Implentation. John Wiley and Sons, West
Sussex, 2009.
[120] W. Lembe. Term Structure Modeling and Estimation in
a state space Framework. Springer Verlag, Berlin and Heidelberg, 2006.
[121] Bernard C. Levy. Principles of signal Detection and
Parameter Estimation. Springer Science + Business Media, New York,
2008.
[122] Frank L. Lewis, L. Xie, and D. Popa. Optimal and
Robust Estimation with an Introduction to Stochastic Control Theory.
Taylor and Francis Group, Boca Raton, 2008.
[123] William A. Link and Richard J. Barker. Bayesian
Inference with Ecological Applications. Elsevier, Oxford, 2010.
[124] R. S. Liptser and A.N. Shiryaev. Statistics of
Random Processes :II Applications. Springer - Verlag, New York, 2001.
[125] D. V. Lndley. Introduction to probability and
Statistics :From a Baye-sian Viewpoint. Cambridge University Press, New
York, 1970.
[126] A.W. Lo. Maximum likelihood estiamation of generalized
itô processes with discretely sampled data. Econometric Theory,
4 :231 - 247, 1988.
[127] H. Lutkepohl. New Introduction to Multiple Time
Series Analysis. Springer - Verlag, Berlin and Heidelberg, 2005.
[128] H. Lutkepohl and Markus Kratzig. Applied Time
Series Econometrics. Cambridge University Press, Cambridge, 2004.
[129] G. S. Maddala. Introduction to Econometrics.
MACMILLAN Publishing Company, New York, 2 edition, 1992.
[130] G. S. Maddala, C.R.Rao, and H.D.Vinod, editors.
Handbook of Statistics, volume 11. Elsevier Science Publishers B.V.,
Amsterdam, 1993.
[131] G. S. Maddala and In Moo Kim. Unit
Roots,Cointegration, and Structural Change. Cambridge University Press,
Cambridge, 1998.
[132]
80
Greory N. Mankiw. Macroéconomie. De Boeck
University, Bruxelles, 2 edition, 2001.
[133] R. Mansuy and M. Yor. Aspects of Brownian Motion.
Springer - Verlag, Berlin and Heidelbert, 2008.
[134] J. M. Marin and Christian P. Robert. Bayesian Core
: A Practical Approach to Computational Bayesian Statistics. Springer
Science + Business Media, LLC, New York, 2007.
[135] P. Medvegyev. Stochastic Integration Theory.
Oxford University Press, New York, 2007.
[136] M. Meyer. Contunuous Stochastic Calculus with
Applications to Finance. Chapman and Hall/CRC, Boca Raton, 2001.
[137] Russell B. Millar. Maximum Likelihood Estimation
and Inference. John Wiley and Sons, West Susssex, 2011.
[138] G. N. Milstein. Numerical Integration of Stochastic
Differential Equations. Springer Science + Business Media, Dordrecht,
1995.
[139] G. N. Milstein. Numerical Integration of Stochastic
Differential Equations. Springer Science + Business Media, Dordrecht,
1998.
[140] Yuliya S. Mishura. Stochastic Calculus for
Fractional Brownian Motion and Related Processes. Springer - Verlag,
Berlin and Heidelberg, 2008.
[141] S. K. Mitter and A. Moro, editors. Nonlinear
Filtering and Stochastic Control, Berlin and Heidelberg, July 1983. the
Centro Internationale Matematico Estivo, Springer - Verlag.
[142] John C. Nash and M. Walker Smith. Nonlinear
Parameter Estimation: An Integrated System in BASIC. Nash Information
Service, Ottawa, 1995.
[143] A. O'Hagan. Bayesian Inference, volume 2B of
Kendall's Advanced Theory of Statistics. Oxford University Press, New
Yok, 2000.
[144] A. O'Hagan and Mike West. The Oxford Handbokk of
Applied Bayesian Analysis. Oxford University Press, Oxford, 2010.
[145] B. Oksendal. Stochastic Differential Equations.
Springer-Verlag, Berlin, 5 edition, 2000.
[146]
81
McKean Jr. H. P. Stochastic integrals. Academic
Press, New York, 1969.
[147] E. Pardoux. Markov Processes and Applications
Algorithms, Networks, Genome and Finance. Dunod and John Wiley and Sons,
Paris, 2008.
[148] G.A. Pavliotis and A.M. Stuart. Parameter estimation
for multiscale diffusion. Journal of Statistical Physics, 127(4) :741
- 781, May 2007.
[149] S. Perzat and J. Zabczyh. Stochastic Partial
Differential Equations with Lévy Noise. Cambridge University Press,
New York, 2007.
[150] H. Pham. Optimisation et controle stochastique
appliqués à la finance. Springer - Verlag, Berlin, 2007.
[151] E. Platen and N.Bruti Liberti. Numerical Solution
of Stochastic Differential Equations with jumps in Finance. Springer -
Verlag, Berlin and Heidelberg, 2010.
[152] Y. Pokern, Andrew M. Stuart, and Petter Wiberg.
Parameter estimation for partially observed hypoelliptic diffusions.
Journal of the Statistical Society, 71(1) :49 - 73, 2009. B.
[153] B. L. S. Prakasa Rao. Parameter estimation for linear
stochastic differential equations driven by fractional brownian motion.
Random Operations and Stochastic Equations, 11 :229 - 242, 2003.
[154] B. L. S. Prakasa Rao. Statistical Inference for
Fractional Diffusion Processes. John Wiley and Sons, West Sussex, 2010.
[155] Philip E. Protter. Stochastic Integration and
Differential Equations. Springer - Verlag, Berlin and Heidelberg, 2004.
[156] Christian P. Robert. The Bayesian Choice From
Decision - Theoretic Foundations to Computational Implementation. Springer
Science + Business Media, New York, 2 edition, 2007.
[157] A. Robler. Runge - Kutta Methods for the Numerical
Solution for Stochastic Differential Equations. Springer, Berlin, 2003.
[158] Daniel B. Rowe. Multivariate Bayesian Statistics
Models for Source Separation and Signal Unimixing. Chapman and Hall/CRC,
Boca Raton, 2003.
[159]
82
Thomas H. Scheike and Anders Juul. Maximum likelihood
estimation for cox's regression model under rested case - control sampling.
Bio-statistics, 5(2) :193 - 206, 2004.
[160] David W. Scott. Multivariate Density
Estimation,Theory, Practice and Visualization. John Wiley and Sons,
Hoboken, 1992.
[161] Pavel V. Shevchenko. Modelling Operational Risk
using Bayesian Inference. Springer - Verlag, Berlin and Heidelberg,
2011.
[162] R. Situ. Theory of Stochastic Differential
Equations with Jumps and Applications. Springer Science + Business Media,
New York, 2005.
[163] D. Sorensen and Daniel Gianola. Likelihood Bayesian
and MCMC Methods in Quantitative Genetics. Springer - Verlag, New York,
2002.
[164] P.J.C. Spreij. Stochastic Integration.
Springer Science, New York, 2004.
[165] S. S. Sritharan. Nonlinear filtering of stochastic
navier - stokes equations. In T. Funaki and W.A. Woyczynski, editors,
Nonlinear Stochastic PDEs : Burgers Turbulence and Hydrodynamic Limit
(PDF), pages 247 - 260. Springer-Verlag, 1994.
[166] Nancy L. Stokey. The Economics of Inaction :
Stochastic Control Models with Fixed Costs. Princeton University Press,
Princeton, 2009.
[167] Nancy L. Stokey, Robert E. Lucas Jr., and Edward C.
Prescott. Recursive Methods in Economic Dynamics. Harvard University
Press, Cambridge, 1989.
[168] H. Tanizaki and R.S. Mariano. Prediction, filtering and
smoothig in nonlinear and non normal cases using monte carlo integration.
Journal of Applied Econometrics, 9(2) :163 - 179, 1994.
[169] C. C. Tsui. Robust Control System Design : Advanced
State Space Technique. Marcel Dekker, New York, 2 edition, 2004.
[170] A. van den Bos. Parameter Estimation for Scientists
and Engineers. John Wiley and Sons, Hoboken, 2007.
[171] F. van der Heijder, R.P.W.Duin, D.de Ridder, and
D.M.J.Tax. Classification, Parameter Estimation and State Estimation :An
Engineering Aproach using MATLAB. John Wiley and Sons, West Sussex,
2004.
[172]
83
C. van Eeden. Restricted Parameter Space Estimation
Problems Admissibility and Minimaxity Properties. Springer Science
Business LLC, New York, 2006.
[173] R. van Handel. The stability of conditional markov
processes and markov chains in random environment. The Annals of
Probability, 37(5) :1876 - 1925, 2009.
[174] Carl E. Walsh. Monetary Theory and Policy. The
MIT Press, Cambridge, 3 edition, 2010.
[175] Donald M. Wiberg. State Space and Linear Systems.
Schaums Outline series. McGraw - Hill, New York, 1997.
[176] Robert L. Williams and Douglas A. Lawrence. Linear
State - Space Control Systems. John Willey and Sons, Hoboken, 2007.
[177] J. Xiong. An Introduction to Stochastic Filtering
Theory. Oxford University Press, Oxford, 2008.
[178] A. Yger and J. A. Weil. Mathématiques
Appliquées L3. Pearson Education, Paris, 2009.
[179] N. Yoshida. Estimation for diffusion processes from
discrete observation. Journal of Multivariate Analysis, 41 :220 - 242,
1992.
[180] A. Zaknick. Principles of Adaptive Filters and
Self-learning Systems. Springer - Verlag, London, 2005.
[181] J. Zarzycki. Nonlinear Prediction Ladder - Filters
for Higher - Order Stochastic Sequences. Springer - Verlag, Berlin and
Heidelberg, 1985.
[182] A. Zellner. An Introduction to Bayesian Inference
in Econometrics. JohnWiley and Sons, New York, 1971.
[183] A. Zellner and Joseph B. Kadane. Robustness of
Bayesian Analyses, volume 4 of Studies in Bayesian Econometrics.
Elsevier Science Publishers B.V., 1984.
[184] W. Zou and M. Schechter. Critical Point Theory and
Its Applications. Springer Science + Business Media, New York, 2006.
84
Table des matières
|
1 Préliminaires mathématiques
1.1 Eléments de la théorie de la mesure et
intégration
|
6
6
|
|
1.1.1
|
Limite inférieure et supérieure
|
7
|
|
1.1.2
|
Espaces vectoriels normés
|
8
|
|
1.1.3
|
Propriétés de l'intégrale des fonctions
étagées positives
|
9
|
|
1.1.4
|
Produit des espaces mesurés
|
10
|
|
1.1.5
|
Conditionnement et indépendance de probabilité. . .
.
|
11
|
|
1.2
|
Espérance conditionnelle
|
11
|
|
1.2.1
|
Variables aléatoires
|
13
|
|
1.2.2
|
Modes de convergence
|
13
|
|
1.3
|
Processus stochastiques
|
16
|
|
1.3.1
|
Processus de Markov
|
16
|
|
1.3.2
|
Chaînes de Markov
|
19
|
|
1.3.3
|
Temps d'arrêt
|
21
|
|
1.3.4
|
Martingales à état indépendant
|
22
|
|
1.3.5
|
Mouvement brownien
|
23
|
|
1.3.6
|
Quelques modification du mouvement brownien . . . .
|
24
|
85
1.3.7 Martingales et Semimartingales
|
2 Equations Différentielles et Intégrales
Stochastiques
|
26
31
|
|
2.1
|
Calculs stochastique
|
31
|
|
2.2
|
Equations différentielles stochastiques
|
33
|
|
2.2.1
|
Equations différentielles stochastiques ordinaires . .
|
. . 33
|
|
2.2.2
|
Equations aux dérivées partielles stochastiques
|
34
|
|
2.3
|
Intégrales stochastiques
|
37
|
|
2.3.1
|
Intégrale Stochastique d'Itô
|
37
|
|
2.3.2
|
Intégrale Stochastique de Stratonovich
|
40
|
|
2.4
|
Schémas numériques
|
41
|
|
2.4.1
|
Schéma d'Euler
|
42
|
|
2.4.2
|
Schéma de Milstein
|
43
|
|
2.4.3
|
Schéma de Heun
|
44
|
|
2.4.4
|
Méthodes de Runge - Kutta
|
44
|
|
2.4.5
|
Schéma de Platen
|
45
|
3 Applications des intégrales stochastiques
à l'estimation sta-
tistique 46
3.1 Estimation de paramètres des équations
différentielles stochas-
tiques 46
3.1.1 Estimation des paramètres pour les
équations différen-
tielles stochastiques linéaires 47
3.1.2 Méthodes d'estimation des paramètres 49
3.1.3 Méthode de maximum de vraisemblance 49
3.1.4 Méthode d'estimation Bayésienne 51
86
3.2 Estimation des équations aux
dérivées partielles stochastiques
avec dérive linéaire 52
3.3 Estimation des paramètres stochastiques par le
filtre stochas-
tique 54
3.3.1 Formulation du modèle d'état - espace
stochastique . . 54
3.3.2 Filtre stochastique de Kalman - Bucy 55
3.3.3 Filtre stochastique optimal 56
3.3.4 Approximation discrète - temporelle du filtre de
Kal-
man - Bucy 57
4
3.3.5 Equations de Filtre de Kalman pour les processus
discrets 57
|
Applications aux processus stochastiques
temporels
4.1 Revue empirique sur la modélisation stochastique
|
59
59
|
|
4.1.1
|
Modèle de Bachelier
|
60
|
|
4.1.2
|
Modèle de Black - Scholes
|
60
|
|
4.1.3
|
Modèle de Cox - Intgersoll - Ross
|
60
|
|
4.1.4
|
Modèle de Heath - Jarrow - Morton
|
60
|
|
4.1.5
|
Modèle de Vasicek
|
61
|
|
4.1.6
|
Modèle de Black - Karasinski
|
61
|
|
4.1.7
|
Modèle de Hull - While
|
61
|
|
4.1.8
|
Modèle de Aït - Sahalia
|
61
|
|
4.2
|
Estimation des paramètres de l'équation
différentielle stochas-
|
|
|
tique de l'inflation
|
62
|
|
4.2.1
|
Présentation théorique de l'inflation
|
62
|
|
4.2.2
|
Présentation du modèle
économétrique
|
63
|
87
4.2.3 Estimation du processus stochastique
autorégressif d'ordre
1 64
4.2.4 Résultats des estimations 65
4.3 Estimation de la contribution stochastique de la main
d'oeuvre
congolais sur son bien - être économique 66
4.3.1 Modèle théorique du bien - être
économique 66
4.3.2 Spécification économétrique du
modèle état - espace
du développement économique 66
4.3.3 Estimation du modèle de bien - être congolais
67
4.3.4 Présentation et Interprétation des
résultats 68
| 

