|
Promotion : 2022/2023
République Algérienne Démocratique
et Populaire
Ministère de l'Enseignement Supérieur et
de la Recherche Scientifique

Université Abderrahmane Mira de
Béjaia
Faculté des Sciences Exactes
Département de Recherche
Opérationnelle
Projet de fin d'étude
En vue de l'obtention du diplôme de Master en
Mathématiques Appliquées
Option : Modélisation
mathématique et évaluation des performances des
réseaux
????????????????????????????????????????????
Modélisation
et Optimisation de Mouvement des Conteneurs au
niveau du Terminal à Conteneurs BMT
?
?????????????????????????????????????????????
Réalisé par : Mr. YAICHE
Hichem
|
Soutenu le 03 / 07 / 2023, devant le jury
composé de :
|
|
|
Président:
|
Mr. ASLI Larbi
|
MCA
|
Université de Béjaia
|
|
Promoteur:
|
Mr. KABYL Kamal
|
MCB
|
Université de Béjaia
|
|
Examinatrice:
|
Mlle. AOUDIA Zohra
|
MAA
|
Université de Béjaia
|
|
Remerciements
|
I
Avant tout, je remercie le bon dieu de m'avoir donné la
santé, la volonté,le courage et la patience nécessaire
pour la réalisation de ce travail.
Je tiens à exprimer mes sincères remerciements
à mon promoteur Dr. KABYL Kamal pour son encadrement,
son soutien et ses conseils précieux tout au long de ce projet. Son
expertise et sa disponibilité ont grandement contribué à
la réussite de ce travail. Je tiens à exprimer ma reconnaissance
envers les membres de mon jury de mémoire, et les remercier pour leur
temps et leur engagement à évaluer mon travail et à me
donner des commentaires constructifs. Leurs contributions ont aidé
à améliorer la qualité de ce mémoire.
Je remercie également Mr. BOUMERZOUG Moussa
chef du service informatique au sein de BMT, pour son accueil
chaleureux, son écoute et ses conseils pertinents et le personnel de la
Direction des Opérations, ils ont veillé à me fournir un
bon environnement de travail, qui m'a permis d'atteindre ces
résultats.
Enfin, je suis très reconnaissant envers ma famille
pour leur soutien indéfectible et leur encouragement tout au long de mes
études. Leurs encouragements m'ont aidé à
persévérer et à atteindre mes objectifs
académiques.
Encore une fois, je tiens à remercier toutes les
personnes qui ont contribué à ce projet de mémoire et qui
ont rendu cette réalisation possible.
Je dédie ce travail avec une profonde gratitude et une
immense affection à ma famille, qui m'a soutenu tout au long de ce
parcours, en particulier à mes parents pour leur amour inconditionnel,
leur soutien financier et leur encouragement constant. Je leur suis
reconnaissant de m'avoir donné les ailes pour atteindre mes
rêves.
Je dédie également ce mémoire à
mon promoteur Dr. KABYL Kamal qui m'a guidé avec
sagesse, expertise et bienveillance, et à tous mes enseignants qui m'ont
accompagné tout au long de mon cursus académique.
Enfin, je tiens à exprimer ma gratitude à tous
mes camarades, qui ont été présents à mes
côtés, m'ont encouragé, soutenu et inspiré. Ce
mémoire est également dédié à vous tous.
II
YAICHE Hichem
III
Liste des figures V
Liste des tableaux VI
Introduction générale 1
1 Présentation de l'organisme d'accueil
4
Introduction 4
1.1 Définition de Bejaia Mediterranean Terminal (BMT)
4
1.2 Situation géographique 5
1.3 Structure organisationnelle de BMT 5
1.4 Le terminal à conteneurs 6
1.4.1 La zone de quai 7
1.4.2 La zone terrestre 7
1.5 Les outils de gestion du terminal 9
1.5.1 Système de gestion de terminal à conteneurs
(CTMS) 9
1.6 Les Équipements de manutention de BMT 9
1.7 Les opérations de BMT 10
1.7.1 Les planifications 10
1.7.2 La manutention 10
1.7.3 L'acconage 11
1.8 Les procédures import / export de BMT 11
1.8.1 À l'import 11
-Page IV-
Table des matières
|
IV
|
|
1.8.2 À l'export
1.9 Les objectifs de BMT
1.10 Les atouts de l'entreprise
1.11 Position du problème
Conclusion
|
12
13
13
14
14
|
|
2
|
Revue de littérature
|
15
|
|
Introduction
|
15
|
|
2.1
|
Historique du conteneur
|
15
|
|
2.2
|
Travaux de recherche liés au problème
traité
|
16
|
|
2.3
|
tableau récapitulatif des travaux de recherche
liés au problème traité . . .
|
21
|
|
Conclusion
|
22
|
|
3
|
Optimisation combinatoire : Concepts de base
|
23
|
|
Introduction
|
23
|
|
3.1
|
Qu'est ce que l'optimisation combinatoire?
|
23
|
|
3.2
|
Problème d'optimisation combinatoire (POC)
|
24
|
|
3.3
|
Outils de modélisation
|
24
|
|
|
3.3.1 La théorie des graphes
|
25
|
|
|
3.3.2 La programmation linéaire (PL)
|
25
|
|
|
3.3.3 La programmation linéaire mixte (PLM)
|
26
|
|
|
3.3.4 La programmation linéaire en nombres entiers
(PLNE)
|
26
|
|
3.4
|
Théorie de la complexité
|
27
|
|
|
3.4.1 Classes des problèmes d'optimisation combinatoire
|
27
|
|
3.5
|
Quelques problèmes classiques d'optimisation
combinatoire
|
28
|
|
|
3.5.1 Problème de transport
|
28
|
|
|
3.5.2 Problème d'affectation
|
29
|
|
|
3.5.3 Problème d'ordonnancement
|
30
|
|
|
3.5.4 Problème du voyageur de commerce
|
32
|
|
3.6
|
Méthodes de résolution
|
34
|
|
|
3.6.1 Méthodes exactes
|
34
|
|
|
3.6.2 Méthodes approchées
|
37
|
|
Conclusion
|
38
|
Table des matières V
4 Modélisation et résolution du
problème 39
Introduction 39
4.1 Les hypothèses du modèle 39
4.2 Les paramètres du modèle 40
4.2.1 Les ensembles 40
4.2.2 Les indices et les paramètres utilisés dans
le modèle : 40
4.3 Les variables de décision du modèle 42
4.4 Formulation mathématique 43
4.4.1 L'objectif 43
4.4.2 Les contraintes 43
4.5 Le modèle mathématique 46
4.6 Complexité du problème 47
4.7 Exemple numérique 47
4.8 Implémentation et résolution du problème
49
4.8.1 Description de l'outil informatique 50
4.8.2 Rapport de la solution 50
4.8.3 Interprétation des résultats 52
Conclusion 52
Conclusion générale 53
Annexe 55
Bibliographie 61
-Page V-
VI
1.1
|
Jointe venture création de BMT.
|
5
|
|
1.2
|
Situation géographique de BMT
|
5
|
|
1.3
|
Structure organisationnelle de BMT
|
6
|
|
1.4
|
Plan du terminal à conteneurs
|
7
|
|
1.5
|
Les équipements de manutention de BMT
|
11
|
|
3.1
|
Graphe simple -G-
|
25
|
|
5
|
Schéma de modèle
|
60
|
|
6
|
Nouvel assistant de fichier
|
60
|
|
Liste des tableaux
|
VII
1.1
|
Les caractéristiques du quai.
|
7
|
|
1.2
|
Les caractéristiques des équipements de manutention
de BMT
|
10
|
|
2.1
|
tableau résumant des travaux de recherche liés au
problème traité.
|
21
|
|
2.2
|
tableau résumant des travaux de recherche liés au
problème traité (suite). . .
|
22
|
|
4.1
|
Données d'ordre général.
|
47
|
|
4.2
|
Le temps de manutention des RTGs
|
48
|
|
4.3
|
Le temps de transport ti vers la
destination sur le quai des conteneurs. . . .
|
48
|
|
4.4
|
Le temps de transport à vide
tvqa des camions du quai vers
différentes baies
|
48
|
|
4.5
|
Les localisations des conteneurs dans la zone de stockage
|
49
|
|
6
|
Tableau des faits saillants d'AMPL
|
55
|
|
Introduction générale
|
1
Après la Seconde Guerre mondiale, le transport maritime
est devenu un secteur primordial de l'économie mondiale. Il joue un
rôle crucial dans la chaîne logistique globale car il
représente aujourd'hui l'un des principaux modes de transport pour les
échanges internationaux de marchandises. En effet, d'après La
Conférence des Nations Unies sur le Commerce et le Développement
(UNCTAD), 11 milliards de tonnes est le volume total de marchandises qui ont
été transportés par voie maritime en 2021 [23], ce qui est
équivalant à Plus de 90% du commerce mondial s'effectue par
mer.
L'apparition et le développement de la conteneurisation
a joué un rôle majeur dans l'es-sor du transport maritime. La
conteneurisation est un concept révolutionnaire qui consiste à
utiliser des conteneurs standardisés pour emballer, transporter et
stocker les marchandises de manière efficace et sécurisée.
Ce concept n'est apparu qu'au 19ème (années 50), mais
depuis lors il est devenu un élément indispensable dans le
domaine du transport. le système du conteneur se répand à
travers le monde car il permet, en plus de l'optimisation de l'espace à
bord des navires, un gain de temps incroyable aux opérations de
manutentions. Se met alors en place une normalisation internationale des
conteneurs; 20 pieds (6m) et 40 pieds (12m) comme dimensions standard des
conteneurs.
Les terminaux maritimes à conteneurs jouent un
rôle essentiel dans le système de transport maritime
conteneurisé, Ce sont des infrastructures portuaires spécialement
conçus pour le traitement efficace des conteneurs lors de leur
chargement, déchargement, stockage et transfert entre les
différents modes de transport (maritime, terrestre et ferroviaire). Un
terminal maritime à conteneurs se décompose en deux grandes
zones, chacune étant
Introduction générale 2
-Page 2-
caractérisée par ses propres opérations
de manutention et ses équipements. En effet, dans la partie quai, les
navires sont chargés/déchargés par des portiques de quai.
Tandis que dans la partie terrestre, appelée encore la zone
d'entreposage, cette zone possède comme équipements les portiques
de cour. Un autre équipement, qui est le véhicule de transport
(ce sont généralement des camions portuaires), ils assurent le
transport des conteneurs du quai vers la zone d'entreposage et vice-versa.
En pratique, afin d'améliorer l'efficacité des
opérations portuaires de manutention à cause des flux plus
importants de conteneurs, il est primordial d'identifier et de résoudre
une série de problèmes d'optimisation comme : le problème
de stockage des conteneurs (PSC), le problème d'allocation des postes
à quai, la planification des opérations des portiques de quai, la
planification des opérations des portiques de cour, le problème
des mouvements improductifs (Rehandle), etc.
Le processus général d'un terminal à
conteneurs peut être décrit comme une séquence
d'opérations à partir de l'arrivée des porte-conteneurs
jusqu'au départ des conteneurs du port ou vice-versa. Les conteneurs
destinés à l'exportation arrivent au port par camion, sont
répartis entre les blocs et stockés dans une aire de stockage.
Après une certaine période de temps, les conteneurs sont
retirés des blocs avec les portiques de cour et sont transportés
par les véhicules vers les quais où ils sont
prélevés par des portiques de quai et chargés sur les
navires. Dans la situation d'importation, quand un navire arrive au terminal,
les conteneurs importés doivent être déchargés par
les portiques de quai. Ensuite, ils sont placés sur des véhicules
qui vont les amener jusqu'aux aires de stockage. Après un certain temps,
les conteneurs quittent les aires de stockage et ils seront transportés
par véhicules.
En termes de gestion, les terminaux à conteneurs font
l'objet de l'attention de la communauté scientifique et des
professionnels du domaine portuaire, qui ont essayé de proposer des
actions d'amélioration des opérations du manutention et
d'exploitation des espaces de stockage afin d'améliorer la performance
des terminaux portuaires et de faire face à l'aug-mentation du trafic de
conteneurs dans les terminaux.
Notre problématique est axée sur la
planification des opérations de manutention des conteneurs
effectuées par les portiques de cour et les camions. En outre, nous nous
focali-
Introduction générale 3
-Page 3-
sons sur la synchronisation des opérations
simultanées de manutention entre les portiques de cour et les camions,
en tenant compte des éventuelles mouvements non productifs. Ce
problème est formulé en programme linéaire mixte puis il
est résolu à l'aide de langage AMPL en utilisant le solveur
d'optimisation CPLEX dans le but de minimiser le temps de complétion des
opérations de manutention des conteneurs destinés à
l'exportation.
Organisation du rapport
Pour mener à bien ce travail, nous avons jugé
utile de diviser ce mémoire en quatre chapitres :
· Le premier chapitre est consacré à la
présentation de l'entreprise BMT, ses structures,ses moyens et ses
services, et à la position du problème traité dans ce
mémoire.
· Dans le deuxième chapitre, nous citons
brièvement quelques travaux de recherche théoriques et
expérimentaux sur les problèmes de planification des
équipements de manutention dans un terminal maritime
· Dans le troisième chapitre, nous donnons des
aspects théoriques de l'optimisation combinatoire tels que : des outils
de modélisation, des problèmes classiques d'optimisation, des
méthodes de résolution existantes dans la littérature et
la complexité algorithmique.
· Le quatrième chapitre quant à lui
présente une modélisation de notre problème et en
proposant un modèle mathématique d'aide de décision, puis
nous donnons un exemple numérique pour comprendre le fonctionnement de
notre modèle, ensuite nous allons implémenter le modèle
sous le logiciel AMPL et résoudre l'exemple en utilisant le sol-veur
d'optimisation CPLEX.
La conclusion de ce travail mettra l'accent sur les
recommandations et explorera les perspectives qui en découlent.
4
1
Présentation de l'organisme
d'accueil
Introduction
Le transport maritime devient de nos jours, de plus en plus
important et représente une alternative crédible et
intéressante au transport terrestre et aérien, notamment avec
l'évolu-tion du phénomène de conteneurisation.
Dans ce chapitre nous nous intéressons à la
présentation du terminal à conteneurs de Bé-jaia (BMT).
1.1 Définition de Bejaia Mediterranean Terminal
(BMT)
BMT-SPA (Société Par Actions) est une jointe
venture entre l'Entreprise Portuaire de Béjaia (EPB) et Portek Systems
and Equipment.EPB est l'autorité portuaire qui gère le port de
Béjaia. PORTEK Systems and Equipment,une filiale du Groupe PORTEK qui
est un opérateur de Terminaux à conteneurs (Société
Singapourienne).
Sa mission principale est de traiter dans les meilleures
conditions de délais,de coûts et de
sécurité,l'ensemble des opérations qui ont un rapport avec
le conteneur. Pour ce faire, elle s'est dotée d'équipements
performants et de systèmes informatiques pour le support de la
logistique du conteneur afin d'offrir des services de qualité, efficaces
et fiables pour assurer une satisfaction totale des clients [3].
BMT veille au développement et à la gestion de
son terminal à conteneurs où l'intégrité, la
productivité, l'innovation, la courtoisie, et la sécurité
sont de rigueur.
La figure (1.1) représente la jointe venture de cet
entreprise :

1.3 Structure organisationnelle de BMT 5
-Page 5-
FIGURE 1.1 - Jointe venture création de BMT.
1.2 Situation géographique
L'entreprise BMT est implanté au centre du pays, au
coeur de la méditerranée dans le nord du continent africain, le
Port de Béjaia occupe une situation géographique
stratégique.Il dessert un hinterland important et très vaste. La
ville, le port et le terminal à conteneurs de Béjaia disposent de
ce fait de voies de communication reliant l'ensemble des routes du pays, des
voies ferroviaires et à proximité d'un aéroport
international. La figure ci-dessous représente la situation
géographique de BMT.

FIGURE 1.2 - Situation géographique de BMT
1.3 Structure organisationnelle de BMT
Dans la structure organisationnelle de BMT,on distingue six
directions principales : Direction Générale (DG), Direction de
Ressources Humaines et Moyennes (DRHM), Direction des Opérations (DO),
Direction Marketing (DM), Direction des Finances et de Comptabilités
1.4 Le terminal à conteneurs 6
-Page 6-
(DFC), Direction Technique (DT). Elle est
représentée dans la figure ci-dessous:
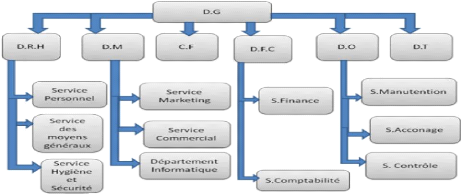
FIGURE 1.3 - Structure organisationnelle de BMT
La direction vers laquelle nous avons été
dirigés lors de notre stage dans cette entreprise est la direction des
opérations.Cette dernière assure la planification des escales, du
parc à conteneurs et la planification des ressources (équipes et
équipements). Elle comprend quatre services:
· Service acconage : Assure la gestion des
opérations au niveau du terminal.
· Service manutention: Assure la gestion
des opérations au niveau des navires.
· Service ressource: Assure une meilleure
affectation des équipements et ressources.
· Service logistique: Assure le suivi
des moyens logistiques ainsi que la prestation logistique globale.
1.4 Le terminal à conteneurs
Le terminal à conteneurs se décompose en deux
grandes zones:
· La zone de quai.
· La zone terrestre.
La figure (1.4) montre ces deux zones:
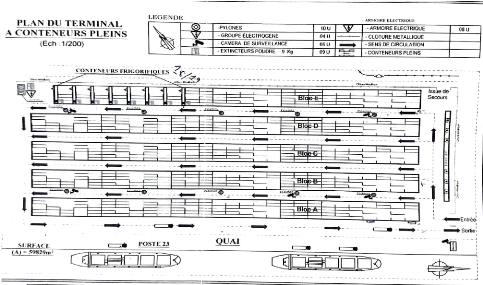
1.4 Le terminal à conteneurs 7
-Page 7-
FIGURE 1.4 - Plan du terminal à conteneurs
1.4.1 La zone de quai
Le rôle de cette zone est de servir de point de
transfert des conteneurs entre le terminal et les
navires(chargement/déchargement).
Les caractéristiques de cette zone sont
résumées dans le tableau suivant:
Longueur
|
500mL
|
Profondeur (tirant d'eau)
|
12 mL
|
Superficie du bassin
|
60ha
|
Nombre de postes
|
02 postes à quai
|
|
TABLE 1.1 - Les caractéristiques du quai.
1.4.2 La zone terrestre
Cette partie est subdivisée en quatre (04) zones
· Parc à conteneurs pleins,
· Zone visite,
·
1.5 Le terminal à conteneurs 8
-Page 8-
Zone de dépotage/empotage,
· Parc à conteneurs vides et empotés.
1.4.2.1 Le parc à conteneurs pleins
Dans cette cour sont entreposés temporairement les
conteneurs déchargés des navires et destinés à
être livrés aux clients par voie ferroviaire ou routière et
les conteneurs destinés à l'exportation. Cette zone est
répartie en cinq (05) blocs (A, B, C, D, E) disposés
parallèlement au quai,chaque bloc est constitué de six (06)
tronçons adjacents horizontaux formant les rangées et de 52
tronçons adjacents verticaux formant les baies (aussi appelés
slots ou piles), une partie de bloc E est réservée pour les
Conteneurs frigorifiques (reefers) qui a 500 prises,de plus les conteneurs sont
stockés en pile de six (06) niveau. Ainsi, la position d'un conteneur
dans la cour est caractérisée par une adresse formée du
bloc, numéro de pile(slot), rangée et niveau. Ce parc a une
capacité de 8300 EVP et une superficie de 78500m2 [3].
1.4.2.2 Le zone visite:
Dans cette zone s'effectue le contrôle des marchandises
portées dans les conteneurs (service vétérinaire,
phytosanitaire, DCP, Douane), les conteneurs ayant fait la visite seront soit
transférés à la zone du stockage ou livrés à
leur propriétaire.
1.4.2.3 La zone dépotage/empotage
Dans cette zone s'effectue les opérations de
dépotage et d'empotage tels que:
· Empotage : C'est l'opération
de chargement des marchandises à l'intérieur d'un conteneur, il
peut être effectué soit dans les locaux du client soit à
l'intérieur du terminal.
· Dépotage: C'est
l'opération de déchargement d'un conteneur de son contenu. Les
marchandises dépotées sont livrées à leur
propriétaire et les conteneurs vides sont transférés vers
la Zone Extra-portuaire (ZEP) là où ils sont stockés
temporairement avant d'être réclamés.
Cette zone a une capacité de 600 evp
(Équivalent Vingt Pieds) et une Superficie de 3500 m2.
1.6 Les Équipements de manutention de BMT
9
-Page 9-
1.5 Les outils de gestion du terminal
Afin d'améliorer les opérations de manutention
des conteneurs BMT s'est dotée des système informatiques de
gestion du terminal pour assurer une meilleure traçabilité du
conteneur et de sa sécurité. Le système le plus important
est le CTMS (Container Terminal Management System).
1.5.1 Système de gestion de terminal à
conteneurs (CTMS)
BMT dispose de système logistique de gestion du
terminal à conteneurs (CTMS) qui a pour objectif d'effectuer des
activités, d'assurer une bonne planification du terminal, d'of-frir un
niveau élevé de l'efficacité opérationnelle pour
ses clients, d'améliorer le service et s'adapter aux besoins des
clients. Le CTMS assure plusieurs tâches telles que:
· le suivi du processus d'import et d'export;
· la gestion de retour des conteneurs vides au terminal;
· la gestion des restitutions des conteneurs (vides ou
pleins);
· le suivi de dépotage des conteneurs;
· la planification des activités sur les navires
(chargement / déchargement);
· le suivi des opérations de chargement et de
déchargement;
· la réception des conteneurs à
l'exportation;
· le suivi des opérations de shifting au niveau du
parc à conteneurs;
· la facturation des clients.
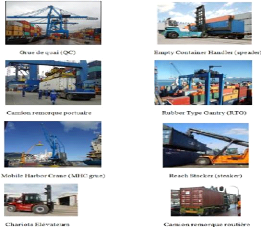
1.6 Les Équipements de manutention de BMT
BMT est le seul Terminal à Conteneur en Algérie
à être suffisamment équipé en moyens et
matériels spécialisés,de manutention et de levage qui
réduisent les temps d'escale permettant de répondre aux attentes
et aux exigences des opérateurs. Le tableau ci-dessous montre ces
équipements et ses caractéristiques :
La figure (1.5) montre bien ces équipements:
1.7 Les opérations de BMT 10
-Page 10-
Les équipements
|
Nombre
|
Tonnage
|
Grue de quai (QC)
|
02
|
40 Tonnes
|
portiques gerbeurs sur pneus (RTG)
|
10
|
40 Tonnes
|
Camion remorque routière
|
42
|
36 Tonnes
|
Camion remorque portuaire
|
16
|
40 Tonnes
|
Chariots Elevateurs Tonnes
|
11
|
2.5,3,5,10 tonnes
|
Steacker
|
10
|
40 tonnes
|
Spreader
|
11
|
10 Tonnes
|
MHC (Grue)
|
02
|
100 Tonnes
|
|
TABLE 1.2 - Les caractéristiques des équipements
de manutention de BMT.
1.7 Les opérations de BMT
La performance d'un terminal à conteneurs se mesure
par le temps d'escale, la rapidité des opérations, la
qualité des services et le coût du transit du conteneur. BMT
reçoit annuellement un grand nombre de navires pour lesquels elle assure
avec un suivi et une traçabilité les opérations de
planification, de manutention et d'acconage telles que:
1.7.1 Les planifications
· Planification des escales : programmation des accostages
et des postes à quai;
· Planification déchargement/chargement;
· Planification du parc à conteneurs (visite,
dépotage, enlèvement et restitution des conteneurs vides au
parc);
· Planification des ressources : équipes et moyens
matériels. 1.7.2 La manutention
Après accostage du navire, des équipes
spécialisées s'occupent de toutes les opérations de
manutention au navire:
· Débarquement des conteneurs;
· Shifting des conteneurs;
· Embarquement des conteneurs.
1.8 Les procédures import / export de BMT
11
-Page 11-
FIGURE 1.5 - Les équipements de manutention de BMT
1.7.3 L'acconage
Une fois le conteneur est disposé dans le parc, les
opérations suivantes peuvent prendre place:
· Suivi des visites du conteneur par les services
concernés;
· Changement de position des conteneurs;
· Suivi des livraisons et des dépotages;
· Suivi des restitutions et des mises à quai;
· Mise à disposition des conteneurs vides pour
empotage.
1.8 Les procédures import / export de BMT
1.8.1 À l'import
1. La visite: le transitaire doit remettre au
service des opérations certains documents pour la procédure
administrative. Par la suite, l'agent de BMT établira une liste
complète des conteneurs à préparer pour la visite du
lendemain qui sera remise au chef de la section exploitation. Il doit à
son tour confirmer la mise à disposition des conteneurs en zone de
visite pour le lendemain.
2.
1.8 Les procédures import / export de BMT
12
-Page 12-
La pesée: Le client est appelé
à présenter au service des Opérations les documents
nécessaires. A ce moment-là, l'agent BMT fait charger le
conteneur sur un camion remorque pour effectuer la pesée.
3. La livraison: Pour permettre un suivi
rigoureux des livraisons, le transitaire doit remettre un dossier complet. Par
conséquent, l'agent chargé des opérations commerciales
devrait confirmer la conformité du dossier pour établir le CDO
(Container Delivery Order) et l'enregistrer sur fichier électronique
consacré au suivi des livraisons.
4. Le dépotage: Le transitaire doit
remettre à l'agent de BMT chargé des dépotages un dossier
spécifique à l'opération. Par la suite, l'agent de BMT
prépare le CMR (Container Movement Request) ;c'est le document
nécessaire pour le dépotage à remettre au pointeur
affecté à la zone de dépotage,mais au préalable
l'agent chargé des opérations commerciales remettra au chef de
section exploitation une liste contenant tous les conteneurs à
préparer pour le lendemain. Après chaque confirmation de fin
dépo-tage,l'agent doit s'assurer que la lettre de dépotage soit
signée par le responsable de section pour clôturer le dossier
[3].
1.8.2 À l'export
1. La restitution: Pour permettre un suivi
rigoureux des restitutions, l'agent responsable de BMT doit exiger du pointeur
une liste quotidienne des conteneurs restitués avec leurs positions au
terminal et s'assurer de comparer les bons reçus avec le nombre total de
conteneurs figurants sur la liste.
2. Suivi des mises à quai: Cette
opération est assurée par l'agent responsable des restitutions,
qui doit s'en assurer du bon suivi grâce à la tenue d'un fichier
électronique mis à jours avec la saisie des restitutions
journalières, et ce avec le concours du pointeur désigné
et chargé pour le suivi des restitutions conjointement avec l'agent
responsable des restitutions à la fin de la journée. La signature
des mises à quai est assurée par le chef de section.
3. Mise à disposition: Le suivi des
mises à disposition devrait être assuré par l'agent
chargé des opérations commerciales responsable des mises à
disposition, qui doit par conséquent tenir un fichier
électronique spécialement consacré aux conteneurs mis
à disposition.
4.
1.10 Les atouts de l'entreprise 13
-Page 13-
Empotage : Le client est libre d'effectuer
cette opération soit à l'intérieur du terminal à
conteneurs (empotage à quai), soit à l'extérieur (empotage
externe) dans ses propres locaux.
5. Visite/Pesée: Le transitaire ou le
client final doit remettre au service des opérations les documents
nécessaires. A ce moment-là, l'agent de BMT établira une
liste complète des conteneurs préparés pour la visite,la
pesée et la mise à disposition de ces conteneurs dans la zone de
visite [3].
1.9 Les objectifs de BMT
Les objectifs se résument en :
· Faire du terminal à conteneurs de BMT une
infrastructure moderne à même de répondre aux exigences les
plus sévères en matière de qualité dans le
traitement du conteneur;
· La mise à disposition d'une nouvelle
technologie dans le traitement de conteneurs pour:
1. Un gain de productivité;
2. Une réduction des coûts d'escale;
3. Une fiabilité de l'information;
4. Un meilleur service clientèle.
· Sauvegarder la marchandise des clients;
· Faire face à la concurrence nationale et
internationale;
· Gagner des parts importantes du marché.
1.10 Les atouts de l'entreprise
Pour réaliser ses objectifs BMT mis à la
disposition de ses clients une technologie et un savoir-faire dans le
traitement du conteneur pour leur assurer:
· une rade où les navires attendent avant de se
mettre dans le quai et un port non congestionné.
· Un tirant d'eau d'au moins 12m
· Des quais spécialisés pour le
conteneur.
·
1.11 Position du problème 14
-Page 14-
Un temps d'escale réduit.
· Une capacité de stockage importante.
· Des installations spécialisées pour les
reefers et les produits dangereux.
1.11 Position du problème
Vu l'augmentation de flux des conteneurs entrant à BMT
ces dernières années, une croissance vertigineuse du nombre de
conteneurs qui séjournent simultanément au terminal. En outre les
conteneurs déchargés des navires et ceux qui sont destinés
à l'exportation sont arrangés aléatoirement dans les blocs
de la zone de stockage ce qui rend certains d'entre eux inaccessible au moment
de leur récupération ainsi des remaniements
(ré-arrangements) des conteneurs sont nécessaires pour
accéder à ceux désirés, ces remaniements sont
considérés comme des mouvements improductifs, car ils
monopolisent le matériel et ralentissent les autres opérations
portuaires.
Notre objectif est de modéliser les mouvements des
conteneurs destinés à l'exportation afin de minimiser le temps de
départ des camions qui les transportent et ce qui va entraîner la
minimisation du temps de séjour des navires au niveau des quais, par
conséquent minimiser le temps d'attente des navires qui sont dans la
rade.
Conclusion
Dans ce chapitre, nous avons donné un aperçu
général sur l'entreprise d'accueil afin de comprendre le contexte
de notre problème, et nous avons expliqué ce dernier.
Dans le chapitre suivant, nous passerons en revue des travaux
de recherche pertinents à notre travail.
15
2
Revue de littérature
Introduction
La revue bibliographique constitue une étape
fondamentale de toute recherche scientifique. Elle permet d'explorer et
d'analyser les travaux antérieurs réalisés dans un domaine
spécifique, fournissant ainsi une base solide pour la
compréhension de l'état actuel des connaissances,
l'identification des lacunes et la formulation des objectifs de recherche.
De nombreuses recherches ont montré la grande
importance de la planification et d'opti-misation dans les terminaux à
conteneurs. Dans ce chapitre, nous présentons une revue
détaillée de la littérature existante sur la planification
simultanée des mouvements des portiques de cour et les
déplacements des véhicules surtout lorsqu'il s'agit d'une
opération d'exportation (outbound).
2.1 Historique du conteneur
Le conteneur a été créé en 1956
par l'Américain Malcolm MacLean, transporteur né en Caroline du
Nord en 1913 dans une famille de classe moyenne. En 1953, cet entrepreneur se
rend compte que les autoroutes reliant les différents les ports de la
côte ouest sont complètement saturés et l'idée
d'embarquer les camions remorques directement sur les bateaux. Puis il vend son
entreprise de camionnage et investit dans une petite compagnie maritime pour
transporter les remorques. Il s'aperçoit rapidement que l'espace
utilisé est trop élevé. De là, l'idée lui
vint d'enlever le cadre et d'embarquer seulement le haut de la remorque ou la
"boîte" elle-même. Le conteneur est né.
Après la naissance du conteneur, il y a une date
où les conteneurs sont développés présentés
sous forme de flux:
·
2.2 Travaux de recherche liés au problème
traité 16
-Page 16-
1958-1961 : Standardisation des tailles de contenants : la
« box » commence à conquérir le monde.
· En 1961 apparaissent ISO, 20 pieds (6m) et 40 pieds
(12m) comme dimensions standard des conteneurs.
· 2014 : Au 1er janvier, la flotte mondiale comptait 4
976 porte-conteneurs capables de transporter 17,3 millions Boîtes d'EVP
simultanément (équivalent 20 pieds).
2.2 Travaux de recherche liés au problème
traité
D'après le travail de K. H. KIM (1997)
Les travaux de manutention influencent considérablement les
performances des grues de transfert dans un terminal à conteneurs. La
hauteur et la largeur d'une baie dans la pile de conteneurs sont des variables
de décision importantes dans la conception de la configuration de
stockage. Et ce sont des facteurs clés qui déterminent le nombre
moyen de remaniements pour ramasser un conteneur. Dans cet article, il propose
une méthodologie pour estimer le nombre prévu des mouvements non
productifs pour ramasser un conteneur arbitraire et le nombre total de
portiques de cour pour ramasser tous les conteneurs dans une baie pour une
configuration d'empilage initiale donnée. Des tableaux et des
équations simples sont fournis pour aider à estimer le nombre de
remaniement.
La méthode proposée dans ce travail est un
algorithme de routage optimal appelé "Optimal Routing algorithm"
basé sur la programmation linéaire pour minimiser le temps total
de manutention des conteneurs par les portiques de cour. [15].
Z. WEIYING, L. YAN et J. ZHUOSHANG (2006)
voient que le temps d'accostage des navires au port dépend de
l'efficacité du chargement et du déchargement des conteneurs, le
ré-arrimage est le principal facteur qui influence l'arrimage. Un
modèle d'optimisation qui réduit au maximum le nombre de
mouvements inutiles est mis en avant lorsque le portique de cour charge les
conteneurs aux terminaux portuaires. Chaque étape de l'opération
de chargement des conteneurs est considérée comme un noeud de
graphiques, les coûts de ramassage des conteneurs sont pris comme
coefficients de pondération, puis le moindre arbre couvrant et la
méthode heuristique sont utilisés pour obtenir une solution
optimale. L'exemple montre que le modèle peut aider le planificateur
à obtenir une séquence de chargement optimale, ce qui peut
favoriser l'efficacité du chargement. Il fournit une base scienti-
2.2 Travaux de recherche liés au problème
traité 17
-Page 17-
fique pour l'opération de chargement dans le terminal
à conteneurs d'exportation [22].
A. IMAI, K. SASAKI, E. NISHIMURA et
S. PAPADIMITRIOU (2006) considèrent que
l'ef-ficacité d'un terminal maritime de conteneurs dépend
principalement du bon déroulement et de l'organisation du processus de
manipulation des conteneurs, en particulier lors du chargement du navire. Les
plans de stockage des conteneurs sur un navire et de chargement sont
principalement déterminés par deux critères : la
stabilité du navire et le nombre minimal de mouvements improductifs des
conteneurs requis. Ce dernier critère est basé sur le fait que la
plupart des navires porte-conteneurs ont une structure cellulaire et que les
conteneurs d'exportation sont empilés dans une aire de stockage. Ces
deux critères de base sont souvent en conflit.
Cet article traite des plans de stockage des conteneurs sur un
navire et de chargement des conteneurs qui satisfont ces deux critères.
Le problème est formulé comme un programme en nombres entiers
multi-objectif. Afin d'obtenir un ensemble de solutions non dominées
pour le problème, ils ont utilisé la méthode de
pondération. Pour résoudre le problème de chargement des
conteneurs sur le navire ainsi celui du problème de remanutention, ils
ont utilisé l'algorithme génétique. Une grande
variété d'expériences numériques a
démontré que les solutions obtenues par cette formulation sont
utiles et applicables en pratique [12].
Y. LEE et N-Y. HSU (2007)
déclarent que dans la plupart des parcs à conteneurs du
monde, les conteneurs sont empilés en hauteur pour utiliser l'espace de
stockage plus efficacement. Dans ces parcs, l'un des principaux facteurs
affectant leur efficacité opérationnelle est la
nécessité de remanier les conteneurs lors de l'accès
à un conteneur enterré sous d'autres conteneurs. Une façon
d'obtenir une efficacité de chargement plus élevée
consiste à pré-organiser les conteneurs de manière
à ce qu'ils correspondent à la séquence de chargement.
Dans cette recherche, Ils présentent un modèle
mathématique pour le problème de pré-marshalling
(pré-triage ou bien pré-rassemblement) des conteneurs. En ce qui
concerne un agencement d'une zone de stockage donné et une
séquence donnée de chargement des conteneurs sur un navire, le
modèle fournit un plan pour repositionner les conteneurs d'exportation
dans la zone, de sorte qu'aucune re-manipulation supplémentaire ne sera
nécessaire pendant l'opération de chargement. L'objectif
d'optimisation est de minimiser le nombre de mouvements de conteneurs lors du
pré-triage. Le modèle résultant est un modèle de
programmation en nombres entiers composé d'un problème de flux
multi-
2.2 Travaux de recherche liés au problème
traité 18
-Page 18-
marchandises et d'un ensemble de contraintes secondaires.
Plusieurs variantes possibles du modèle ainsi qu'une solution
heuristique sont également discutées. Des résultats de
calcul sont fournis [17].
Y. LEE et Y-J. LEE (2010)
étudient le problème de récupération des
conteneurs d'un terminal maritime dans une séquence donnée, qui
est une partie importante du processus de chargement des navires. Ils disent
que les mouvements supplémentaires qui font perdre du temps et de
l'argent se produisent lorsqu'un conteneur qui doit être
récupéré de la cour est enterré sous d'autres. Une
façon de réduire les remaniements consiste à stocker les
conteneurs dans des emplacements soigneusement planifiés. Cependant,
dans la pratique, les conteneurs d'exportation arrivent au terminal de
manière très incertaine. Même lorsque les emplacements de
stockage des conteneurs sont soigneusement planifiés, ils peuvent
toujours être empilés dans le mauvais ordre en raison d'un manque
d'informations précises ou pour d'autres raisons.
Les chercheurs présentent une heuristique basée
sur une méthode de recherche locale en trois phases à
résoudre pour un plan de travail optimisé pour un portique de
cour pour récupérer tous les conteneurs d'une zone de stockage
donné selon une commande donnée. L'objectif d'optimisation est de
minimiser le nombre de mouvements de conteneurs, ainsi que le temps de travail
de portique de cour. Après avoir généré une
séquence de mouvements faisable initiale, la deuxième phase
réduit la longueur de la séquence en formulant et en
générant à plusieurs reprises un programme d'entiers
binaires. Avec un autre programme mixte à nombres entiers, la
troisième phase réduit le temps de travail de portique de cour en
ajustant la séquence de mouvement par itérations. Les
résultats des tests numériques montrent que l'heuristique est
capable de résoudre des instances avec plus de 700 conteneurs [18].
Selon le travail de J. X. CAO, D.-H. LEE, J. H. CHEN
et Q. SHI (2010), la synchronisation des
équipements de manutention (notamment portiques de cour et
véhicules de transport) permet l'amélioration de la
productivité des terminaux à conteneurs. Ils ont proposé
un nouveau modèle intégré pour les problèmes de
planification des camions et des portiques de cour pour les opérations
de chargement dans les terminaux à conteneurs. Le problème est
formulé comme un modèle de programmation linéaire mixte
pour minimiser le temps de complétion de l'opération de
chargement des conteneurs dans la cour destinés à
2.2 Travaux de recherche liés au problème
traité 19
-Page 19-
l'exportation en se basant sur les hypothèses suivantes
:
1. Seules les opérations de chargement des conteneurs
d'exportation sont prises en considération.
2. L'emplacement de chaque conteneur est donné.
3. La localisation des portiques de cour est
donnée.
4. Chaque conteneur a un temps de ramassage spécifique
et ce temps est le même quelque soit le portique de cour.
5. Après avoir terminé la tâche actuelle,
les portiques de cour et les camions peuvent se déplacer vers le point
d'origine de la tâche qui suit.
6. La vitesse de déplacement du portique de cour est
différente de la vitesse de déplacement du camion.
7. La capacité d'un camion est égale à
1, c'est à dire effectuer une seule tâche.
8. Pas d'interférence entre les camions.
9. Les conteneurs peuvent être manutentionnés
dans n'importe quel ordre.
10. Les conteneurs sont disponibles à partir de la
cour dans n'importe quel ordre.
11. Pas d'interférence entre les portiques de cour.
Deux méthodes de solution efficaces, basées sur
la décomposition de Benders, sont développées pour la
résolution du problème; à savoir, la méthode
générale et la méthode combinatoire qui sont basées
sur la coupe de Benders. Selon les auteurs, la résolution du
problème d'ordonnancement des opérations des portiques de cour et
des camions est une nouvelle idée permettant l'amélioration de
l'efficacité des opérations portuaires.[4].
L'auteur K. Chebli (2011) s'intéresse
au problème de mouvements des conteneurs dans le cas d'exportation. Les
séquences de fonctionnement des portiques de cour et des camions sont
prises en considération en même temps. Elle prend en compte les
interférences qui peuvent exister entre les portiques de cour. Le
problème de planification des opérations de chargement des
conteneurs est d'abord formulé en programme linéaire mixte. La
fonction objectif minimise le temps de complétion des opérations
de manutention par les portiques de cour. Le modèle mathématique
est basé sur plusieurs hypothèses, tenant compte des deux
phénomènes d'interférence et des mouvements non
productifs. Pour résoudre le problème, une approche heuristique
de type Recherche Adaptative à Large Voisinage (ALNS)
2.3 Travaux de recherche liés au problème
traité 20
-Page 20-
est développée. Cette méthode a la
capacité de résoudre les problèmes d'optimisation dans un
terminal à conteneurs. En effet, la méthode ALNS est jugée
efficace quelque soit la taille du problème: 10, 20 et 100
conteneurs.
T. ÜNLÜYURT et C. AYDIN
(2012) proposent des stratégies de remanutention
améliorées à mettre en oeuvre dans la
récupération des conteneurs, une partie essentielle des
opérations des terminaux à conteneurs. Les auteurs introduisent
le problème en notant que la quantité de marchandises
chargés dans des conteneurs et transportées à
l'étranger a récemment augmenté en raison de
l'évolution des barrières commerciales entre les pays ainsi que
de la flexibilité et de la fiabilité de ce type de transport.
Les auteurs élaborent des stratégies pour
minimiser le temps total requis pour récupérer les conteneurs
d'une baie dans une séquence prédéterminée. Par
exemple, il peut y avoir d'autres conteneurs au-dessus du conteneur à
récupérer, et il peut y avoir d'autres endroits pour que ces
conteneurs soient déplacés. Les auteurs utilisent un algorithme
basé sur Branch and Bound, et proposent des heuristiques alternatives
qui donnent des solutions presque optimales. Ils ont testé les
algorithmes sur des configurations de 8000 baies générées
aléatoirement avec 200 combinaisons différentes de
paramètres [21].
Le sujet d'étude faite par Consuelo
PARRENO-TORRES, Ramon ALVAREZ-VALDES et
Rubén RUIZ (2019) est le problème de
pré-marshalling . Étant donné une configuration de baie
initiale, le problème de pré-rassemblement recherche une
séquence de travail qui minimise le nombre de mouvements
nécessaires pour obtenir une configuration finale dans laquelle les
conteneurs seront situés dans la baie n'ayant pas de conteneurs
bloquants. Cela peut entraîner des réductions drastiques du temps
de chargement car il n'est plus nécessaire d'effectuer des mouvements
improductifs dans les baies une fois que les navires sont accostés, ce
qui se traduit par des temps d'accostage plus courts, ils trouvent que c'est un
moyen efficace d'accélérer les opérations de
chargement/déchargement des navires au terminal à conteneurs.
En utilisant des modèles de programmation
linéaire entière, les auteurs proposent une approche prometteuse
pour résoudre le problème de pré-triage, ils ont
développé deux familles de modèles alternatives, ce qui
permet d'explorer différentes méthodes de résolution. De
plus,ils ont mis au point une procédure de solution itérative qui
ne dépend pas d'une borne supérieure difficile à obtenir
[20].
2.3 tableau récapitulatif des travaux de recherche
liés au problème traité 21
-Page 21-
2.3 tableau récapitulatif des travaux de
recherche liés au problème traité
|
Auteurs
|
Problème traité
|
Méthode(s) de réso- lution
|
Contribution(s)
|
|
K. H. KIM(1997)
|
Estimation du
nombre des mouve-
ments improductifs
pour récupérer un
conteneur
|
Techniques d'optimi- sation
|
Détermination du
nombre moyen de
remaniements pour
récupérer un conte-neur
|
|
Z. WEIYING, L.
YAN et J. ZHUO-
SHANG(2006)
|
Réduction au maxi- mum le nombre des mouvements inutiles
des conteneurs
|
-Le moindre arbre couvrant
-Méthode heuristique
|
Améliorer l'efficacité
du chargement des conteneurs dans un navire
|
|
A. IMAI, K. SASAKI,
E. NISHIMURA
et S. PAPADIMI-
TRIOU(2006)
|
-Problème de sto-
ckage des conte-
neurs sur un navire -Minimiser les mou-
vements improductifs dans les blocs
|
-Méthode de pondé- ration -Algorithme
géné- tique
|
Améliorer l'efficacité
et la productivité d'un terminal maritime
|
|
Y. LEE et N-Y.
HSU(2007)
|
le problème de
pré-marshalling des
conteneurs
|
Approche heuristique
|
Minimiser le nombre
de mouvements de
conteneurs lors de
pré-triage
|
|
Y. LEE et Y-J.
LEE(2010)
|
Problème de récupé- ration des conteneurs
dans une séquence donnée
|
Heuristique basée sur une méthode de recherche
locale
|
-Minimiser le nombre
de mouvements des
conteneurs et le
temps de travail des portiques de cour
|
|
J. X. CAO et D. -H. LEE (2010)
|
Problème de planifi-
cation des camions et
des
portiques de cour
|
Décomposition de
Benders : Méthode
générale et
méthode combinatoire
|
-Améliorer la produc-tivité d'un terminal à
conteneurs
|
TABLE 2.1 - tableau résumant des travaux de recherche
liés au problème traité.
2.3 tableau récapitulatif des travaux de recherche
liés au problème traité 22
|
Auteurs
|
Problème traité
|
Méthode(s) de réso- lution
|
Contribution(s)
|
|
K. CHEBLI(2011)
|
Problème de mou-
vements des conte-
neurs dans le cas
d'exportation
|
Recherche Adapta-
tive à Large Voisi-
nage (ALNS)
|
Minimiser le temps
de complétion de ma-nutention par les por-tiques de
cour
|
|
T. ÜNLÜYURT et C. AYDIN(2012)
|
Problème de récupé-
ration des
conteneurs
|
algorithme basé sur Branch and Bound
|
stratégies de rema-
nutention améliorées à mettre en oeuvre dans
la récupération des conteneurs
|
|
C. P-TORRES, R.
A-VALDES et R.
RUIZ(2019)
|
problème de pré-
marshalling des
conteneurs
|
Approche de résolu- tion prometteuse
|
Configuration opti-
male des baies
|
TABLE 2.2 - tableau résumant des travaux de recherche
liés au problème traité (suite).
Conclusion
Dans ce chapitre nous avons cité quelques travaux
pertinents liés au problème traité dans ce mémoire.
Les études faites dans ces travaux sont diversifiées à
cause de diversification des opérations effectuées dans les
terminaux maritimes et les équipements de manutention utilisées,
on trouve dans certains travaux des sous-problèmes qui sont
traités dans un même travail, dans ce cas, l'analyse se complique
vu que les opérations des différents équipements se font
simultanément.
Des concepts de base, des outils de la Recherche
Opérationnelle nécessaires pour la modélisation et la
résolution du problème posé seront donnés dans le
chapitre suivant, a savoir: quelques notions de base sur l'optimisation
combinatoire.
-Page 22-
23
3
Optimisation combinatoire : Concepts de base
Introduction
La recherche opérationnelle est un domaine
pluridisciplinaire permettant de produire de meilleures décisions. Elle
fournit des outils pour rationaliser, simuler et optimiser l'archi-tecture et
le fonctionnement des systèmes industriels et économiques. Elle
propose des modèles pour analyser des situations complexes et permet aux
décideurs de faire des choix efficaces et robustes.
L'optimisation combinatoire est une méthode clé
de la recherche opérationnelle pour résoudre les problèmes
d'optimisation, elle étudie comment décrire et atteindre ce qui
est meilleur, une fois que l'on connaît comment mesurer et modifier ce
qui est bon et ce qui est mauvais. La théorie de l'optimisation comprend
l'étude quantitative des optimums et les méthodes pour les
trouver,elle cherche à améliorer une performance en se
rapprochant d'un point optimum.
3.1 Qu'est ce que l'optimisation
combinatoire?
L'optimisation combinatoire est une branche de la recherche
opérationnelle.C'est un ensemble d'outils destiné à
modéliser et à résoudre une catégorie de
problèmes. Cette catégorie est définie par un ensemble
fini (d'où le mot combinatoire) de solutions admissibles
(réalisables) [2].
3.3 Outils de modélisation 24
-Page 24-
3.2 Problème d'optimisation combinatoire
(POC)
Étant donné un ensemble fini
d'éléments E = {1, 2,. . . , m}, soit
2E l'ensemble des parties de E.Soit P un
problème où l'on considère comme solutions
réalisables des sous ensembles de E vérifiant une
certaine propriété. Autrement dit, on considère l'ensemble
E ainsi qu'un sous ensemble F c 2E,
considérons f une fonction définie de E dans R.
On étend la définition de la fonction f aux parties de
E (ie. 2E), que nous notons F.(eg.
F(A) = >e?A f(e)) [2].
Un problème d'optimisation combinatoire (POC) est donc
caractérisé par la définition de ces trois
éléments:
· l'ensemble élémentaire (ou fondamental);
· l'ensemble F (de sous-ensembles de E
);
· la fonction f et son extension (sa
définition) sur F. Ce qui correspond respectivement à
:
· identification des variables;
· identification des contraintes;
· identification de la fonction objectif [2].
3.3 Outils de modélisation
Définition 3.3.1. La
modélisation mathématique consiste à utiliser des outils
mathématiques tels que des équations, des fonctions, des graphes,
des systèmes dynamiques ou des algorithmes pour représenter et
étudier des situations réelles ou abstraites. La
modélisation permet de simplifier et de formaliser un système
complexe en le décrivant de manière précise et
quantitative, ce qui permet d'en comprendre les propriétés et de
prédire son comportement dans différentes conditions.
la résolution de problèmes de l'optimisation
combinatoire est souvent difficile et nécessite des outils de
modélisation mathématique pour formaliser les problèmes et
les transformer en modèles mathématiques.Les outils les plus
souvent requis pour l'optimisation combinatoire sont:
3.3 Outils de modélisation 25
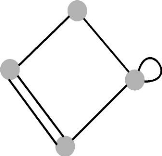
3.3.1 La théorie des graphes
La théorie des graphes fournit des outils pour
résoudre les problèmes d'optimisation combinatoire. Elle offre
des algorithmes pour trouver des chemins optimaux, des couplages ou des flots
maximaux. Les résultats obtenus peuvent permettre de prendre des
décisions plus éclairées et d'optimiser les ressources
disponibles pour atteindre des objectifs spécifiques. La théorie
des graphes est donc une approche importante pour résoudre les
problèmes d'optimisation combinatoire.
Un exemple d'un graphe simple est représenté
ci-dessous:
e5
e3
2
e1 e
2
e 6
1 3
e4
4
G = (V, E) où :
V = {1, 2,3, 4} est
l'ensemble des sommets de graphe G
E = {e1, e2, e3, e4, e5, e6} est l'ensemble
des arêtes de graphe G
-Page 25-
FIGURE 3.1 - Graphe simple -G-
3.3.2 La programmation linéaire (PL)
Le principe de la programmation linéaire est de
modéliser le problème sous forme de contraintes
mathématiques linéaires, c'est-à-dire sous forme
d'équations ou d'inéquations linéaires reliant les
variables du problème. La fonction objectif, qui est à maximiser
ou à minimiser, est également une fonction linéaire.
?
?????
?????
(PL)
La forme générale d'un programme linéaire
est la suivante:
maximiser z = cx
sous contraintes: Ax = b
x = 0
Avec A E m×n
est une matrice (m x n),où
rang(A) = m < n, b E m
un vecteur de
3.3 Outils de modélisation 26
-Page 26-
dimension m, c E Rn un vecteur de dimension n et x E
Rn est un vecteur inconnu.
Remarque 3.3.1. Tout programme
linéaire peut s'exprimer sous forme standard en ajoutant certaines
variables appelées variables d'écart, (par exemple, une
inéquation a.x1 < b devient l'équation a.x1 + x2
= b, x2 > 0).
3.3.3 La programmation linéaire mixte (PLM)
Un programme linéaire mixte est un type de
problème d'optimisation linéaire où les variables de
décision peuvent être à la fois des variables continues et
des variables binaires (ou entières). Il peut être formulé
sous la forme suivante :
(PLM)
|
{
|
maximiser z = c1x + c2y
sous contraintes : a1x + a2y < b
x > 0
y E {0,1}(ou y E N)
|
|
3.3.4 La programmation linéaire en nombres
entiers (PLNE)
De nombreux problèmes d'optimisation, issus de
domaines d'applications très divers, peuvent être
modélisés comme des programmes.
Les programmes linéaires ainsi obtenus sont
appelés programmes linéaires en nombres entiers.Ils sont souvent
difficiles à résoudre, du fait notamment que l'espace de
recherche est discret. Toutefois, la programmation linéaire en nombres
entiers est un outil utile de modélisation des problèmes et de
nombreuses approches de résolution ont été
développées. La formulation générale d'un PLNE est
la suivante :
(PLNE)
|
{
|
maximiser z = f(x1, x2, ... , xn)
sous contraintes : gá(x) <
bá; á E C
x E Nn
|
|
Avec gá(x) et bá sont
généralement composés uniquement de valeurs
entières.
Remarque 3.3.2. Dans le cas où
les composantes du vecteur x E Nn sont remplacées
par x E {0,1}n, on dit qu'on a un programme linéaire
en variables booléennes (PL en 0 - 1) qui
3.5 Théorie de la complexité
27
-Page 27-
s'écrit comme suit:
(PLB)
|
?
?????
?????
|
maximiser z = cx
sous contraintes: Ax = b
x E {0, 1}n
|
|
3.4 Théorie de la complexité
La théorie de la complexité s'attache à
classifier les problèmes selon leur difficulté relative à
l'algorithme de résolution, on distingue deux grandes classes de
problème (en terme de complexité), à savoir: Les
problèmes faciles et Les problèmes difficiles.
Les deux paramètres les plus importants pour mesurer
la qualité d'un algorithme sont : le temps de l'exécution de
l'algorithme et l'espace mémoire qu'il prendra pour résoudre un
problème d'une taille donnée.
Définition 3.4.1. Un algorithme
déterministe est un algorithme qui suit une séquence
d'ins-tructions préétablie et n'utilise pas de source de hasard
ou de choix aléatoire pour prendre des décisions.
3.4.1 Classes des problèmes d'optimisation
combinatoire
Les classes des problèmes d'optimisation combinatoire
sont des catégories qui permettent de classifier les problèmes
selon leur complexité et leur difficulté à être
résolus par des algorithmes efficaces.Parmi elles,on trouve:
· La classe "P" : Problèmes
pouvant être résolus en temps polynomial par un algorithme
déterministe.On dit que les problèmes de cette classe sont
faciles.
· La classe "NP" : Problèmes
pour lesquels une solution peut être vérifiée en temps
polynomial, mais pour lesquels il n'est pas clair qu'il existe un algorithme
déterministe qui puisse trouver une solution en temps polynomial.
· La classe "NP-complet":
Problèmes qui sont dans la classe NP et une solution de
celui-ci peut être vérifiée en un temps polynomial.
· La classe "NP-difficile": Un
problème de NP est dit NP-difficile, si et seulement si il existe un
problème NP-Complet qu'est réductible à lui en temps
polynomial.
3.5 Quelques problèmes classiques d'optimisation
combinatoire 28
-Page 28-
3.5 Quelques problèmes classiques d'optimisation
combinatoire
3.5.1 Problème de transport
Le problème de transport est un problème facile
de l'optimisation,il consiste à déterminer la façon la
plus efficace de transporter des quantités de marchandises depuis un
ensemble de sources vers un ensemble de destinations.
Le problème de transport peut être
formulé de la manière suivante : supposons que nous ayons m
sources et n destinations. Chaque source i dispose d'une
quantité d'offre ai à transporter,et chaque destination
j a une quantité de demande bj à satisfaire. Le
coût de transporter une unité de marchandise de la source i
à la destination j est cij. Nous
devons déterminer le plan de transport qui minimise le coût total
tout en satisfaisant les contraintes d'offre et de demande.
3.5.1.1 Formulation mathématique du
problème
· Les variables de décision:
xij est la quantité à
transportée de la source i ; i = {1, . . . , m}
à la destination j ; j = {1,...,n}
· Les contraintes:
1. La disponibilité: la
quantité de marchandise provenant de la source i doit
être égale à la quantité d'offre ai
disponible à cette source.
2. La demande: la quantité de
marchandise livrée à la destination j doit être
égale à la quantité de demande bj à
satisfaire à cette destination.
· La fonction objectif: Minimiser le
coût total de transport, représenté par la somme des
coûts de transport unitaires cij multiplié par
la quantité de marchandise transportée xij pour chaque
paire source-destination.
· Le modèle mathématique:
Le problème de transport est donné par le programme
linéaire (PL) (3.1) :
3.5 Quelques problèmes classiques d'optimisation
combinatoire 29
?
????????????????? ?
??????????????????
m i=1
cijxij
Xn j=1
xij = ai,
Minimiser Z =
sous contraintes :
Xn
j=1 m
i=1
?i = {1,...,m}
(3.1)
xij = bj, ?j = {1, ... , n}
xij = 0, ?i = {1, ... , m} et ?j = {1, ... , n}
xij ? N, ?i = {1, ... , m} et ?j = {1, ... , n}
à la destination j, ai est la quantité d'offre
disponible à la source i et bj est la quantité de demande
à satisfaire à la destination j.
3.5.2 Problème d'affectation
Le problème d'affectation est un cas particulier du
problème de transport dans lequel chaque source est affectée
à une seule destination, il consiste à établir des liens
entre les éléments de deux ensembles distincts, de telle sorte
à minimiser le coût total de l'affectation en respectant des
contraintes d'unicité de lien pour chaque élément.
Étant donnée n tâches et n agents.Une
affectation consiste à affecter la tâche i; i = {1, ... , n}
à l'agent j ; j = {1, ... , n} de sorte que :
· chaque agent j ait une et une seule tâche à
effectuer à la fois.
· chaque tâche i est attribuée à un
seul agent au même temps.
Le coût d'affectation d'une tâche i un agent j est :
Cij.
Le problème d'affectation consiste à trouver une
affectation de coût minimum.
3.5.2.1 Formulation mathématique du
problème
· Les variables de décision :
xij =
|
{
|
1 si l'agent j est affecté à la tâche i ,
0 sinon
|
|
· -Page 29-
Les contraintes :
3.5 Quelques problèmes classiques d'optimisation
combinatoire 30
1. chaque agent j ne sera affecté qu'à
une et une seule tâche (parmi toutes les tâches
i = {1,...,n}) :
Xn xij = 1,?i = {1,...,n} i=1
2. chaque tâche i ne sera effectuée que
par un seul agent (parmi touts les agents
j = {1,...,n}) :
Xn xij = 1,?j = {1,...,n} j=1
· La fonction objectif: Elle est triviale
car le coût d'avoir affecté i à j est : cijxij , pour tout
i,j={1,. . .,n}.Le coût total de l'affectation globale est:
MinimiserZ =
|
Xn i=1
|
Xn j=1
|
cijxij
|
|
· Le modèle mathématique: Le
problème d'affectation est donné par le programme linéaire
en 0 - 1 (PL en 0 - 1) suivant:
Xn xij = 1,?j = {1,...,n} j=1
xij ? {0,1},?i = {1,...,n} et ?j = {1,...,n}
?
????????????? ?
??????????????
Minimiser Z =
|
Xn i=1
|
Xn j=1
|
cijxij
|
|
sous contraintes :
|
Xn i=1
|
xij = 1,?i = {1,...,n}
|
(3.2)
|
|
-Page 30-
3.5.3 Problème d'ordonnancement:
Le problème d'ordonnancement est un problème
difficile de l'optimisation,il consiste à organiser dans le temps la
réalisation d'un ensemble de tâches d'un projet donné,
compte tenu des contraintes temporelles (délais, contraintes
d'enchaînements,...) et de contraintes portant sur l'utilisation et la
disponibilité des ressources requises pour les tâches [16], et
visant à minimiser (respectivement maximiser) un certain
critère,financiers ou technologiques d'optimalité.De
manière plus précise, on parle d'ordonnancement lorsqu'on
parvient à fixer les dates de début et de fin de chacune des
activités du projet [19].
3.5 Quelques problèmes classiques d'optimisation
combinatoire 31
-Page 31-
3.5.3.1 Formulation mathématique du
problème
· Les variables de décision:
ti : la date de début d'exécution de la
tâche i; td : la date de début du projet; tf :
la date de fin de projet.
· La fonction objectif: L'objectif
principale en gestion est de minimiser la durée du réalisation du
projet qui représente l'écart entre la date de fin du projet et
sa date de début:
MinimiserZ = tf - td = tf
Avec td est fixé généralement
à td = 0
· Les contraintes:
1. Les contraintes de localisation temporelle:
Aucune tâche ne peut commencer avant la date de début de
projet:
ti = 0, i = 1,...,n
2. Les contraintes de succession temporelle:
Exprimer que tout tâche i ne peut pas débuter avant que
toutes ses tâches antérieures j ?
-(i) soient complètement
achevées:
tj + dj = ti, ?j ?
-(i)
3. Les contraintes de fin de projet: Toutes les
tâches du projet doivent terminées avant la date de fin du projet
tf :
ti + di = tf, i = 1,...,n
· Le modèle mathématique: Le
modèle mathématique formulant le problème courant
d'or-donnancement est le programme linéaire (PL) (3.3) :
3.5 Quelques problèmes classiques
d'optimisation combinatoire 32
-Page 32-
????????
?
???????? sous contraintes : tj + dj = ti,
?j E -(i), i = {1, . .
. , n}
Minimiser Z = tf
ti + di = tf, i =
{1,...,n}
ti = 0, i = {1,...,n} (3.3)
3.5.4 Problème du voyageur de commerce:
Le problème du voyageur de commerce (TSP, pour
"Traveling Salesman Problem" en anglais) est un problème difficile de
l'optimisation dans le domaine de la théorie des graphes. Le TSP cherche
à déterminer le trajet le plus court pour qu'un voyageur de
commerce puisse visiter un ensemble donné de villes une fois chacune et
retourner à sa ville de départ. Le défi réside dans
le fait que le nombre de trajets possibles augmente rapidement avec le nombre
de villes à visiter, rendant la recherche de la solution optimale
très difficile.
Le problème du voyageur de commerce peut être
formulé de la manière suivante : Soit G = (V, E)
un graphe complet (tous les sommets sont adjacents deux à deux) non
orienté, où V = {v1,v2,
...,vn} est un ensemble den sommets (villes) et E est
l'ensemble de toutes les arêtes reliant ces sommets. Soit dij
la distance entre les sommets vi et vj pour tout i,j E
{1,2,...,n}.
Le problème du voyageur de commerce consiste à
trouver un cycle hamiltonien de longueur minimale dans G, c'est-à-dire
un cycle qui visite chaque sommet une fois et seulement une fois, et qui
revient au sommet de départ.Le coût (ou la longueur) du cycle est
défini comme la somme des distances entre les sommets visités
dans l'ordre du cycle. Le problème est donc de minimiser:
n-1X dpi,pi+1 + dpn,p1
i=1
où pi représente le sommet visité en
i-ème position dans le cycle.
3.5 Quelques problèmes classiques d'optimisation
combinatoire 33
3.5.4.1 Formulation mathématique du
problème
· Les variables de décision:
xij =
|
?
??
??
|
1 si l'arête (i,j) appartienne au cycle hamiltonien , 0
sinon
|
|
·
-Page 33-
Les contraintes:
1. Pour chaque sommet i, il y a exactement deux arêtes qui
en sortent et deux arêtes qui y entrent:
Xn j=1,j?=i
|
xij = 2, ?i E {1,2,...,n}
|
|
2. Pour chaque arête (i,j), elle ne peut être
incluse que si les deux sommets i et j sont tous les deux visités :
xij =
|
Xn k=1,k?=i
|
xkj, ?i E {1,2,...,n},j E {1,2,...,n},i =? j
|
|
xij =
|
Xn
k=1,k?=j
|
xik, ?i E {1,2,...,n},j E {1,2,...,n},i =? j
|
|
3. Il doit y avoir un unique cycle hamiltonien qui visite tous
les sommets:
|
Xn i=1
|
Xn j=1,j?=i
|
xij = n
|
· Le modèle mathématique: Le
modèle mathématique formulant le problème du voyageur de
commerce est le programme linéaire en 0 - 1 (PL en 0 - 1) suivant:
Minimiser Z = Xn- 1 dpi,pi+1
+ dpn,p1
i=1
sous contraintes :
|
Xn
j=1,j?=i
|
xij = 2, ?i E {1,2,...,n}
|
|
xij = Xn xkj, ?i E {1,2,...,n},j E {1,2,...,n},i =? j
(3.4)
k=1,k?=i
3.6 Méthodes de résolution 34
?
??????????????????? ?
????????????????????
-Page 34-
Xn Xn xij = n i=1
j=1,j?=i
xij E {0,1}, ?i E {1,2,...,n} et ?j E {1,2,...,n}
3.6 Méthodes de résolution
La résolution des problèmes d'optimisation
combinatoire consiste à trouver la meilleure solution, définie
comme la solution globalement optimale ou un optimum global.La
résolution des problèmes combinatoires est assez délicate
puisque le nombre fini de solutions réalisables croît
généralement avec la taille du problème, ainsi que sa
complexité. Cela a poussé les chercheurs à
développer de nombreuses méthodes de résolution en
recherche opérationnelle. Ces méthodes sont classifiées en
deux grandes classes : Méthodes exactes et Méthodes
approchées.
3.6.1 Méthodes exactes:
Elles garantissent la complétude de la
résolution,mais elles sont souvent limitées au cas des
problèmes de petite taille.Parmi ces méthodes on trouve [14] :
3.6.1.1 Méthode de séparation et
évaluation (Branch and Bound)
L'algorithme par séparation et évaluation,
également appelé selon le terme anglo-saxon "Branch and Bound",
est une méthode générique de résolution de
problèmes d'optimisa-tion, et plus particulièrement
d'optimisation combinatoire ou discrète.
C'est une méthode d'énumération
implicite à l'aide d'une arborescence : toutes les solutions possibles
du problème peuvent être énumérées, mais
l'analyse des propriétés du problème permet
d'éviter l'énumération de larges classes de mauvaises
solutions (des branches sont
3.6 Méthodes de résolution 35
-Page 35-
coupées). Dans un algorithme par séparation et
évaluation, seules les solutions potentiellement bonnes sont donc
énumérées [8].
L'algorithme de branch and bound est basé sur trois
axes principaux : séparation,évaluation,et stratégie de
parcours.
· Séparation : La
séparation consiste à diviser le problème en
sous-problèmes. Ainsi, en résolvant tous les
sous-problèmes et en gardant la meilleure solution trouvée, on
est assuré d'avoir résolu le problème initial. Cela
revient à construire un arbre permettant d'énumérer toutes
les solutions.
L'ensemble de noeuds de l'arbre qu'il reste encore à
parcourir comme étant susceptibles de contenir une solution optimale,
c'est-à-dire encore à diviser, est appelée ensemble des
noeuds actifs.
Son principe : Soient Xr la
solution optimale du programme relaxé (PR) et Xi une variable de base
non entière de Xr telles que : [xi] < xi < [xi] + 1.
(P1)
|
{ (P);
et
xi = [xi]
|
(P2)
|
{ (P);
et
xi = [xi] + 1
|
|
La séparation de (P),selon la variable Xi,consiste
à diviser (P) en deux programmes (P1) et (P2). Désignons par :
R0 : la région ne contenant pas de solutions
entières ;
R1 : la région des solutions réalisables de (P1)
;
R2 : la région des solutions réalisables de
(P2). La séparation consiste à éliminer R0 et à
chercher des solutions entières dans les régions R1 et R2 .
· Évaluation :
L'évaluation permet de réduire l'espace de recherche en
éliminant quelques sous ensembles qui ne contiennent pas la solution
optimale. L'objectif est d'essayer d'évaluer l'intérêt de
l'exploration d'un sous-ensemble de l'arborescence.
Le branch and bound utilise une élimination de branches
dans l'arborescence de recherche de la manière suivante : La recherche
d'une solution de coût minimal, consiste à mémoriser la
solution de plus bas coût rencontré pendant l'exploration, et
à compa-
3.6 Méthodes de résolution 36
-Page 36-
rer le coût de chaque noeud parcouru à celui de
la meilleure solution. Si le coût du noeud considéré est
supérieur au meilleur coût, on arrête l'exploration de la
branche et toutes les solutions de cette branche seront nécessairement
de coût plus élevé que la meilleure solution
déjà trouvée.
Son principe : On utilise en
général des fonctions d'évaluation et des bornes.À
l'étape k,on résout le problème relaxé
(PRk ) associé à (Pk). Pour se faire, deux cas
se présentent:
1. Cas où la solution optimale Xk r est
entière, Z(Xk r ) constitue une borne
inférieure à tous les problème prédécesseurs
au problème (Pr), et en même temps un majorant
à tous les problèmes successeurs au problème
(Pk).
2. Cas où la solution optimale obtenue Xk r
n'est pas entière, on sépare de nouveau le problème
(Pk).
· Stratégie de parcours:
1. Parcours en largeur d'abord: cette
stratégie favorise les sommets les plus proches de la racine en faisant
moins de séparations du problème initial. Elle est moins efficace
que les deux autres stratégies présentées.
2. Parcours en profondeur d'abord: cette
stratégie avantage les sommets les plus éloignés de la
racine (de profondeur la plus élevée) en appliquant plus de
séparations au problème initial. Cette voie mène
rapidement à une solution optimale en économisant la
mémoire.
3. Meilleur parcours d'abord: cette
stratégie consiste à explorer des sous-problèmes
possédant la meilleure borne. Elle permet aussi d'éviter
l'exploration de tous les sous-problèmes qui possèdent une
mauvaise évaluation par rapport à la valeur optimale.
3.6.1.2 Méthode de coupes planes
(Cutting-Plane)
La méthode de coupes planes a été
développée par (Schrijver 1986), elle est destinée
à résoudre des problèmes d'optimisation combinatoire (POC)
qui se formulent sous la forme d'un programme linéaire.
3.6 Méthodes de résolution 37
-Page 37-
3.6 Méthodes de résolution 38
Dans le cas où le POC est de grande taille pour le
représenter explicitement en mémoire ou pour qu'il tient dans un
solveur de programmation linéaire, on utilise une technique qui consiste
à enlever une partie de ces contraintes et de résoudre le
problème relaxé (PR). La solution optimale de (PL) est contenue
dans l'ensemble de solutions réalisables de cette relaxation. Pour un
problème de maximisation la solution optimale du problème (PR)
est supérieure ou égale à la solution optimale
donnée par (POC).
Cette méthode consiste à résoudre un
problème relaxé, et à ajouter itérativement des
contraintes du problème initial. On définit une contrainte pour
le problème de maximisation par le couple (s, s ) où
s E Rn et s E R, cette contrainte est dite
violée par la solution
courante x si pour tout y E {x : Ax
b} on a sx < s et sy ~ s , on appelle alors
ces
contraintes des coupes planes. On arrête l'algorithme lorsqu'il
n'y a plus de contraintes violées par la solution courante, on obtient
ainsi une solution optimale pour le problème initial [10].
Remarque 3.6.1. La méthode des
coupes planes est peu performante mais sa performance est
améliorée lorsqu'elle est combinée avec la méthode
"Branch and Bound".
3.6.1.3 Méthode de Branch and Cut
La méthode des coupes planes n'est pas toujours
efficace face aux problèmes difficiles. De même, bien que
l'algorithme du "Branch and Bound" puisse être très performant
pour une certaine classe de problèmes, pour cela on utilise la
méthode "Branch and Cut" qui combine entre l'algorithme du "Branch and
Bound" et de la méthode des coupes planes. Pour une résolution
d'un programme linéaire en nombres entiers (PLNE), la méthode
"Branch and Cut" commence d'abord par relaxer le problème puis appliquer
la méthode des coupes planes sur la solution trouvée. Si on
n'obtient pas une solution entière alors le problème sera
divisé en plusieurs sous-problèmes qui seront résolus de
la même manière [10].
3.6.2 Méthodes approchées:
Le but de ces méthodes est de trouver une solution de
bonne qualité pour un problème d'optimisation de grande taille en
un temps de calcul raisonnable sans garantir l'optimalité de la solution
obtenue [14]. Les méthodes approchées sont réparties en
deux catégories principales : les heuristiques et les
méta-heuristiques.
-Page 38-
3.6.2.1 Les heuristiques
Définition 3.6.1. Une heuristique
est un algorithme approché qui permet d'identifier en temps polynomial
au moins une solution réalisable rapide, pas obligatoirement
optimale.
L'usage d'une heuristique est efficace pour calculer une
solution approchée d'un problème et ainsi accélérer
le processus de résolution exacte. Généralement une
heuristique est conçue pour un problème particulier, en
s'appuyant sur sa structure propre sans offrir aucune garantit quant à
la qualité de la solution calculée. Parmi elles, on cite :
méthode de recherche locale,méthodes gloutonnes,...
3.6.2.2 Les méta-heuristiques
Face aux difficultés rencontrées par les
heuristiques pour avoir une solution réalisable de bonne qualité
pour des problèmes d'optimisation difficiles, les
méta-heuristiques ont fait leur apparition [10].
Définition 3.6.2. Les
méta-heuristiques sont plus complets et complexes qu'une simple
heuristique,elles permettent généralement d'obtenir une solution
de très bonne qualité des problèmes dont on ne connait pas
de méthodes exactes pour les traiter ou bien quand la résolution
du problème nécessite un temps élevé ou une grande
mémoire de stockage.
Plusieurs d'entre elles sont souvent inspirées par des
systèmes naturels dans de nombreux domaines tels que : la biologie
(algorithmes évolutionnaires et génétiques) la physique
(recuit simulé), et aussi l'éthologie (algorithmes de colonies de
fourmis).
Conclusion
Dans ce chapitre nous avons passé en revue quelques
aspects théoriques sur la Recherche opérationnelle (RO), plus
précisément sur l'optimisation combinatoire, ses outils de
modélisation ainsi que ses méthodes de résolution
Dans le prochain chapitre, nous allons élaborer un
modèle mathématique décrivant le problème qu'on a
trouvé à BMT y compris les paramètres, les variables de
décision, la fonction objectif et les contraintes utilisées dans
notre travail.
39
4
Modélisation et résolution du
problème
Introduction
Au cours des dernières années, il y a eu une
attention considérable portée à la modélisation et
à l'évaluation des performances des mouvements des conteneurs
dans le but d'atteindre une fonctionnalité optimale. Cette attention
accrue découle de la volonté de maximiser l'efficacité et
l'efficience des opérations de transport et de logistique liées
aux conteneurs.
Dans ce chapitre, nous décrivons le mouvement des
conteneurs destinés à l'exportation à l'aide d'un
modèle mathématique conçu pour aider à la prise de
décision.
4.1 Les hypothèses du modèle
Lors de l'élaboration d'un modèle
mathématique, il faut prendre en compte certaines d'hypothèses.
Ces dernières vont être intégrées d'une façon
ou d'une autre dans la modélisation. Les hypothèses qu'on a
considéré sont les suivantes :
1. On s'intéresse aux opérations de chargement
des conteneurs qui sont destinés à l'ex-portation (outbound),
2. Tous les conteneurs sont similaires et ont la même
largeur et la même hauteur,
3. On s'intéresse aux conteneurs de 40 pieds.
4. La localisation des conteneurs est donnée,
5. Une zone d'entreposage est formée de plusieurs
blocs adjacents,
6. Chaque bloc contient un seul portiques gerbeurs sur pneus
(RTG),
7.
4.2 Les paramètres du modèle 40
-Page 40-
Il n'y a pas de déplacement des RTGs entre les blocs de la
zone
8. On considère les mouvements simultanés des
portiques de cour et des camions,
9. Les mouvements non productifs (inutiles) des conteneurs
(Rehandle) sont pris en compte,
10. les baies de chaque bloc ne sont pas totalement pleins,
11. Pour chaque conteneur, on connait sa destination sur le quai
(numéro de quai)
12. La vitesse des portiques de cour est de 5km/h,
13. La vitesse des camions portuaires est de 20
km/h,
14. Les conteneurs peuvent être manutentionnés dans
n'importe quel ordre.
4.2 Les paramètres du modèle
4.2.1 Les ensembles
· C : Ensemble des conteneurs à
récupérer pour l'exportation dans la zone d'entrepo-sage tel que
C = {1,... , M} ;
· R : Ensemble des conteneurs qui se trouvent
en dessus des conteneurs à récupérer tel que R =
{M + 1,...,M'};
· P : Ensemble des portiques gerbeurs sur pneus
(RTG) disponibles dans la zone tel que P = {1, . . . ,N}
;
· V : Ensemble des camions portuaires (CP)
disponibles dans la zone tel que V = {1,...,T};
· B : Ensemble des blocs dans la cour;
· L : Ensemble des localisations pour le
stockage des conteneurs d'exportation et de livraison au client final
(localisation = une adresse formée du numéro du bloc, baie,
rangée et étage).
· Q; Ensemble des quais disponibles pour
l'embarquement des navires porte-conteneurs. 4.2.2 Les indices et les
paramètres utilisés dans le modèle:
· i, j : Indices relatifs aux conteneurs;
i, j E C ;
·
4.3 Les paramètres du modèle 41
o : Indice relatif aux conteneurs; o E R;
· i = 0 : Conteneur fictif;
· p : Indice des RTGs p E P ;
· v : Indice des camions v E V ;
· q : Indice des quais; q E Q;
· b :Indice du bloc; b E B ;
· Eb : Nombre des RTGs dans un bloc b;
· li : Localisation d'un conteneur i dans
la zone;
· bi : Numéro du bloc dans la zone pour un
conteneur i dans une localisation li ;
· ai : Numéro de la baie dans un bloc pour
un conteneur i dans une localisation li ;
· ri : Numéro de la rangée pour un
conteneur i dans une localisation li ;
· ei : Numéro d'étage pour un
conteneur i dans une localisation li ;
· bo : Numéro du bloc dans la
zone pour un conteneur o;
· ao : Numéro de la baie dans un
bloc pour un conteneur o;
· ro : Numéro de la
rangée pour un conteneur o;
· eo : Numéro d'étage
pour un conteneur o;
· S : Grande valeur.
· h1 : Temps de traitement d'un conteneur, c'est
à dire le temps pour enlever un conteneur et le mettre dans un
emplacement vide s'il s'agit d'un conteneur non désiré ou-bien le
charger dans le camion s'il s'agit d'un conteneur concerné par
l'exportation;
· h2 : Temps pour enlever un conteneur, le mettre
dans un emplacement vide et le remettre à sa place (mouvement non
productif); on suppose que h2 = 2h1 ;
· ôi : Temps pour décharger le
conteneur i du camion sur le quai.
· kij : Temps de parcours d'un RTG de la zone du
conteneur i vers le conteneur j avec i, j sont dans
le même bloc et ai =? aj ;
· ti : Temps de transport du conteneur i
par un camion, connu a priori, de sa localisation li à sa
destination sur le quai;
· tvqiaj : Le temps de retour à vide du
camion du quai où il a déchargé le conteneur i
vers la baie où il se trouve le prochain conteneur j
à transporter à son tour.
-Page 41-
4.4 Les variables de décision du modèle
42
4.3 Les variables de décision du
modèle
dRTG i: Instant de
début de prélèvement du conteneur i par un RTG
;
dCP i: Instant de
départ d'un camion transportant le conteneur i ;
xijp =
|
{
|
1 si le RTG p traite le conteneur j juste
après le conteneur i , 0 sinon;
|
|
yijv =
|
{
|
1 si le camion v charge le conteneur j juste
après le chargement du conteneur i , 0 sinon;
|
|
wbb'p =
|
{
|
1 si le RTG p se déplace du bloc b vers le
bloc b' , 0 sinon;
|
|
mi : Temps de traitement du
conteneur i par un RTG qui comprend le temps de prélèvement du
conteneur (h1) et le temps pour enlever et remettre les
conteneurs au-dessus (ayant le même ai et ri
; de plus ei < eo)
(h2), sachant qu'on a supposé que h2 =
2h1.
· h2
Le temps mi est calculé comme
suit;
Xmi = h1
+
oER ai=ao ri=ro ei<eo
où P
oER ai=ao ri=ro ei<eo
|
h2 est le temps non productif des
portiques de cour (rehandle).
|
|
· La variable mi peut
être divisée en deux parties
m1i et
m2i qui sont respectivement le temps de
manutention du conteneur i et de son chargement sur le camion, et le temps de
remettre le(s) conteneur(s) qu'on a enlevé à sa (leur)
place(s).
D'où mi =
m1i + m2 i avec;
m1i = h1 +
E
oER ai=ao ri=ro ei<eo
h1 et
m2i = E h2
oER ai=ao ri=ro ei<eo
-Page 42-
4.4 Formulation mathématique 43
4.4 Formulation mathématique
4.4.1 L'objectif
Dans la fonction objectif, on cherche à minimiser le
temps de départ du camion CP transportant le conteneur i. En d'autres
termes, le but est de minimiser le temps de complétion des
opérations de chargement des conteneurs destinés à
l'exportation :
|
Minimiser {max
i?C
|
dCP i },
|
4.4.2 Les contraintes
1. Chaque conteneur est affecté à
un seul portique de cour (le RTG p) :
XM i=0
XN p=1
xijp = 1; Vj E C
M' N
X xiop = 1; Vo E R
o=0 p=1
2. XM T i=0 v=1
-Page 43-
Chaque conteneur est affecté à un seul camion
portuaire (le CP v) :
yijv = 1; Vj E C, i =? j
3. Chaque RTG p traite un seul conteneur à la fois :
M'
X
jo=1
|
x0op = 1; Vp E P
|
|
M'
X
o=1
|
x0op = 1; Vp E P
|
|
4. Chaque camion portuaire v transporte un seul conteneur
à la fois :
XM y0jv = 1; Vv E V
j=1
4.4 Formulation mathématique 44
5. Contrainte de conservation des flux de
conteneurs pour les RTGs
|
XM j=0
|
xijp =
|
XM j=0
|
xjip; i E C,p E P,i =? j
|
6. Contrainte de conservation des flux de
conteneurs pour les camions
|
XM j=0
|
xijv =
|
XM j=0
|
xjiv; i E C, v E V, i =? j
|
7. -Page 44-
Contrainte de définir le temps de manutention du conteneur
i et de son chargement sur le camion :
Xm1 i = h1 +
o?R ai=ao ri=ro ei<eo
|
h1; i E C
|
|
8. Contrainte de définir le temps de remise en place des
conteneurs déjà enlevés :
Xm2 i =
o?R ai=ao ri=ro ei<eo
|
h1; i E C
|
|
9. Assurer l'ordre de traitement des conteneurs par chaque
RTG. Si un RTG p traite le conteneur j juste après le conteneur i avec
bi = bj et ai =? aj alors le RTG p va prendre un temps de
déplacement kij pour charger le conteneur j suivant :
dRTG
j > dRTG
i + (m1i + m2i) +
kij + S(xijp - 1); i E C, j E C,bi = bj,p E
P
10. Garantir l'ordre d'enchaînement des conteneurs par
camion. En d'autres termes, si un camion transporte les conteneurs i et j,
cette contrainte garantit que le conteneur i sera transporté avant le
conteneur j :
dCP
j > dCP
i + ti + ôi + tvqiaj + S(yijv - 1); i E
C, j E C, v E V
11. Déterminer la séquence de traitement des
conteneurs par camion et par RTG :
dCP i> dRTG i +m1i ;
i E C
4.5 Formulation mathématique 45
12. Garantir qu'il n'y ait qu'un seul RTG dans
un même bloc:
Eb + > >N
wbb'p = 1; b E B,p E P
b'?B p=1
13. Pas de déplacement d'un RTG du bloc
b vers le bloc b' :
>
b?B
>
b'?B
wbb'p = 0; p E P
14. Les domaines de définition des
variables de décision sont donnés comme suit:
dRT G
i , dCP
i , m1 i , m2 i ~ 0
xijm, yijp, wij E {0, 1}
-Page 45-
4.5 Le modèle mathématique 46
4.5 Le modèle mathématique
|
Minimiser {max
iEC
|
dCP
i }, (4.1)
|
sous contraintes :
XN p=1
XM i=0
xijp = 1; Vj E C,i =? j
(4.2)
xiop = 1; Vo E R
(4.3)
M'
XN p=1
X
o=0
XT v=1
XM i=0
yijv = 1; Vj E C,i =? j
(4.4)
XM j=1
M'
X
o=1
x0jp = 1; Vp E P
(4.5)
x0op = 1; VpEP
(4.6)
XM y0jv = 1; Vv E V
(4.7)
j=1
|
XM j=0
|
xijp =
|
XM j=0
|
xjip; i E C, p E P, i =?
j (4.8)
|
|
XM j=0
|
xijv =
|
XM j=0
|
xjiv; i E C, v E V, i =?
j (4.9)
|
Eb + X N wbb'p
= 1; b E B, p E P (4.15)
b'EB p=1
|
Xm1i = h1 +
oER ai=ao ri=ro ei<eo
|
h1; i E C (4.10)
|
|
Xm2 i =
|
h1; i E C (4.11)
|
oER ai=ao ri=ro ei<eo
dRTG j> dRTG
i+ (m1i +
m2i) + kij + S(xijp - 1); i
E C, j E C, bi = bj, p E P
(4.12)
dCP
j > dCP
i + ti + ôi + tvqiaj +
S(yijv - 1); i E C,j E C,v E V
(4.13)
dCP i> dRTG
i+ m1i ; i E C
(4.14)
-Page 46-
4.7 Exemple numérique 47
>2
b?B
>2
b'?B
-Page 47-
4.7 Exemple numérique 48
4.8 Implémentation et résolution du
problème 49
wbb'p = 0; p E P (4.16)
dRT G i , dCP
i , m1 i , m2 i = 0 (4.17)
xijp, yijv, wbb'p E {0, 1} (4.18)
4.6 Complexité du problème
Puisque notre modèle mathématique est un
programme linéaire mixte (PLM) qui combine à la fois des
variables continues et des variables binaires, La présence de ces
dernières rend généralement le problème plus
complexe à résoudre que les problèmes linéaires
purement continus.
4.7 Exemple numérique
Pour illustrer notre modèle, nous proposons un exemple
à résoudre manuellement. On suppose qu'il s'agit de :
· 2 blocs, tels que chaque bloc contient 3 baies, 2
rangées, et 2 étages;
· 2 portiques de cour: RTG1 pour le bloc 1 et RTG2 pour le
bloc 2,
· 3 camions portuaire disponibles dans la zone de stockage
: CP1, CP2, et CP3,
· 6 conteneurs concernés par l'exportation, sont
distribués dans les deux blocs avec la couleur bleu. Les conteneurs en
couleur rouge ne sont pas concernés par la
récupération,
· 1 quai pour l'embarquement du navire. On résume
ces données dans le tableau suivant:
Paramètres
|
Valeurs
|
Nombre total de conteneurs concernés par
l'exportation
|
6
|
Nombre total des RTGs
|
2
|
Nombre total des camions
|
3
|
nombre de baies par bloc
|
3
|
Nombre de rangées par bloc
|
2
|
Nombre d'étages
|
2
|
Nombre de quais
|
1
|
|
TABLE 4.1 - Données d'ordre général.
-Page 48-
Le temps de manutention des RTGs est représenté
dans le tableau suivant:
Paramètres
|
Valeurs (en sec)
|
Temps de prélèvement d'un conteneur (h1)
|
180
|
Temps pour enlever un conteneur et le remettre à sa
place (h2)
|
360
|
|
TABLE 4.2 - Le temps de manutention des RTGs.
Matrice de temps de parcours d'un RTG du conteneur i vers le
conteneur j :
1
|
2
|
3
|
4
|
5
|
6
|
0
|
30
|
60
|
0
|
0
|
0
?
?
|
30
|
0
|
30
|
0
|
0
|
0 ? ?
|
60
|
30
|
0
|
0
|
0
|
? ? ?
0
|
0
|
0
|
0
|
0
|
30
|
? ? ?
60
|
0
|
0
|
0
|
30
|
0
|
? ? ?
30
|
0
|
0
|
0
|
60
|
30
|
0 ?
|
|
Le temps de transport ti vers la destination sur le
quai des conteneurs est représenté dans le tableau ci-dessous:
Conteneur Ci
|
C1
|
|
C3
|
C4
|
C5
|
C6
|
Temps de transport (en sec)
|
120
|
130
|
140
|
200
|
210
|
220
|
|
TABLE 4.3 - Le temps de transport ti vers la
destination sur le quai des conteneurs.
Le temps de déchargement d'un conteneur : ôi
= 3min
Le temps de retour à vide des camions
(tvqa) du quai q vers différentes baies est
représenté dans le tableau ci-dessous :
Quai q
|
Baie a
|
tvqa (en sec)
|
1
|
a
|
120
|
1
|
a2
|
130
|
1
|
a3
|
140
|
1
|
a4
|
200
|
1
|
a5
|
210
|
1
|
a6
|
220
|
|
TABLE 4.4 - Le temps de transport à vide
tvqa des camions du quai vers différentes baies
-Page 49-
La localisation de chaque conteneur est comme suit:
C1 :{bloc 1, baie 1, rangée 1, étage 1}
:{bloc 1, baie 2, rangée 2, étage 1}
C3 :{bloc 1, baie3, rangée 1, étage 1}
C4 :{bloc 2, baie 1, rangée 2, étage 1}
C5 :{bloc 2, baie 2, rangée 1, étage 1}
C6 :{bloc 2, baie 3, rangée 2, étage 1}
Les localisations des conteneurs sont représentées
dans la table (4.5), il s'agit ici de la partie de stockage des conteneurs : la
zone d'entreposage.
Baie
????????????
Rangée
|
a1
|
a2
|
a3
|
Rangée 2
|
|
|
|
|
|
Rangée 1
|
C1
|
|
C3
|
|
|
bloc 1
Baie
????????????
Rangée
|
a4
|
a5
|
a6
|
Rangée 2
|
C4
|
|
C6
|
|
|
|
C5
|
|
|
|
|
bloc 2
TABLE 4.5 - Les localisations des conteneurs dans la zone de
stockage.
Les RTGs se positionnent dans l'un des baies de chaque bloc
car il n'y a pas d'ordre de priorité entre les conteneurs.
La valeur maximale atteinte est : dCP3
6 = 1500s = 25min. D'où la valeur
optimale est :
Z* = 1500s = 25min
4.8 Implémentation et résolution du
problème
Dans cette section, nous allons implémenter notre
modèle sous le logiciel AMPL afin de résoudre l'exemple
précédent sur machine.
4.8 Implémentation et résolution du
problème 50
-Page 50-
Conteneur (i)
|
dRT G i
|
dCP
i
|
1
|
dRTG1 1= 0s
|
dCP1 1= dRTG1 1+p11 = 0 + 360 = 360s
|
2
|
dRTG1 = dRT G1
2 1 + p1 1 + p2 1 + k12 =
0 + 360 + 180 + 30 = 570s
|
dCP3
2 = dRTG1
2 + p1 2 = 570 + 360 =
930s
|
3
|
d3TG1 = dFG1 + p12 +
p22 + k23 =
570 + 360 + 180 + 30 = 1140s
|
d°P2 = 4'P2 +t4+ô4+tvq4a3
= 360+
180 + 180 + 140 = 860s
dCP2 3= dRTG1 3+ p1
3= 1140 + 360 =
1500s
|
4
|
dRT G2
4 = 0s
|
dCP2
4 = dRTG2
4 + p14 = 0 + 360 = 360s
|
5
|
d5 TG2 = dRTG2 + p14 +
p24 + k45 =
0 + 360 + 180 + 30 = 570s
|
d5 P1 = dCP1 +t1+ô1+tvq1a5 =
360+
120 + 180 + 190 = 850s
dCP1
5 = dRTG2
5 + p12 = 570 + 360 =
930s
|
6
|
d6TG2 = dpG2 + p15 +
p25 + k56 =
570 + 360 + 180 + 30 = 1140s
|
dg P3 = 4P3 +t2+ô2+tvq2a6 =
930+
130 + 180 + 240 = 1480s
dCP3
6 = dRT G2
6 + p16 = 1140 + 360 =
1500s
|
|
4.8.1 Description de l'outil informatique
L'implémentation et la résolution du
problème ont été effectuées sur un PC doté
d'un processeur Intel(R) Core(TM) i3-4030U CPU 1.90 GHz
et de 4 GB de RAM, en utilisant le langage de
programmation mathématique AMPL avec le solveur d'optimisation
CPLEX.
4.8.2 Rapport de la solution

4.8 Implémentation et résolution du
problème 51
dRT3 [f] := d P [:K]
1 114e 1 : see
2 570 2 93e
3 a 3 360
4 114e 4 1508
5 578 5 930
6 6 908
ni
|
[x] :=
|
ml
|
[: ]
|
·
|
J
m2
|
1
|
54e
|
1
|
360
|
|
1
|
2
|
54e
|
2
|
360
|
|
2
|
3
|
540
|
3
|
360
|
|
3
|
4
|
540
|
4
|
360
|
|
4
|
5
|
540
|
5
|
360
|
|
5
|
6
|
540
|
6
|
360
|
|
6
|
|
[*1
180
180 180 180 180 180
·
·
._
-Page 51-
|
[*,:,1]
|
|
|
|
|
|
|
[*,*,21
|
|
|
|
|
|
|
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
|
0
|
1
|
2
|
3
|
4
|
5
|
6
|
|
0.
|
0
|
0
|
0
|
0
|
0
|
1
|
0
|
|
0
|
0
|
1
|
0
|
0
|
0
|
|
1
|
0.
|
|
0
|
0
|
0
|
0
|
0
|
1
|
1
|
|
0
|
0
|
0
|
0
|
0
|
|
|
|
|
|
|
|
|
2
|
0
|
1
|
|
0
|
0
|
0
|
0
|
|
2
|
0
|
0.
|
|
0
|
0
|
0
|
0
|
3
|
0
|
0
|
1
|
|
0
|
0
|
0
|
|
3
|
0
|
0
|
0.
|
|
0
|
0
|
0
|
4
|
0
|
0
|
0
|
0
|
|
00
|
|
|
4
|
1
|
0
|
0
|
0.
|
|
0
|
0
|
5
|
0
|
0
|
0
|
0
|
0.
|
|
0
|
|
5
|
0
|
0
|
0
|
0
|
1.
|
|
0
|
6
|
0
|
0
|
0
|
0
|
0
|
0
|
|
|
6
|
0
|
0
|
0
|
0
|
0
|
1
|
|
|
|
|
|
|
|
|
|
|
:
|
=
|
|
|
1
|
1
|
1
|
|
|
1
|
1
|
2
|
|
|
1
|
2
|
|
1
|
|
122
|
|
|
|
2
|
1
|
1
|
O
|
|
2
|
1
|
2
|
0
|
|
--
|
2
|
1
|
et
|
|
222
|
|
|
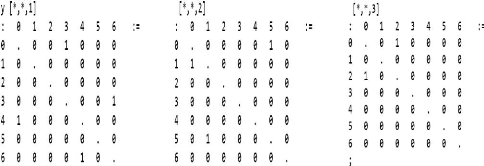
4.8 Implémentation et résolution du
problème 52
4.8.3 Interprétation des résultats
L'application du modèle montre que dans un premier
temps les mouvements improductifs des conteneurs influencent
considérablement sur le temps de manutention des conteneurs à
récupérer. Dans un deuxième temps, le nombre des camions
disponibles joue un rôle important dans les opérations de
manutention. Enfin, l'ordre de traitement des conteneurs à
récupérer n'a pas d'impact sur le temps total de
complétion.
Conclusion
Dans ce chapitre, nous avons développé en
premier lieu un modèle mathématique du problème qu'on a
étudié où on a intégré les hypothèses
du problème ainsi que les objectifs à atteindre. En
deuxième lieu, nous avons résolu un exemple numérique
manuellement pour bien comprendre le fonctionnement de notre modèle,
ensuite nous l'avons résolu avec le logiciel AMPL après avoir
implémenté le modèle élaboré.
-Page 52-
53
Depuis l'introduction des premiers conteneurs au début
des années 1960, les techniques et stratégies de manutention des
conteneurs ont toujours été des facteurs clés pour mesurer
l'efficacité des grands ports. Cependant, en raison de la croissance des
porte conteneurs ces dernières années, chaque fois que l'un de
ces navires accoste dans un port, un certain nombre de conteneurs qui auraient
été impensables il y a quelque temps doivent être
manutentionnés en quelques heures seulement. Cela pose un sérieux
défi aux opérateurs de terminaux à conteneurs, car le
volume de trafic a augmenté de façon exponentielle alors que la
surface disponible pour gérer ce trafic est restée pratiquement
inchangée. Par conséquent, les techniques d'optimisation de la
manutention et de la remanipulation des conteneurs acquièrent un
rôle de premier plan dans la promotion de l'efficacité de
l'exploitation des terminaux à conteneurs [5].
Notre projet de fin d'étude se concentre sur les
problèmes d'optimisation liés à la gestion de mouvement
des conteneurs chez le terminal maritime BMT. On a présenté dans
le premier chapitre une description de ce dernier, le second chapitre fût
consacré à une récapitulation des travaux dans la
littérature portant sur le problème d'optimisation dans le cadre
des terminaux à conteneurs. Dans le troisième chapitre, nous
avons donné quelques notions d'optimisation combinatoire. Après
avoir effectué un diagnostic détaillé du fonctionnement de
l'entreprise tant au niveau administratif qu'opérationnel pendant notre
stage, nous avons modélisé mathématiquement le
problème de mouvement des conteneurs destinés à
l'expor-tation, ensuite nous avons illustré ce modèle avec deux
exemples numériques, puis nous avons implémenté le
modèle et les deux exemples à l'aide du langage AMPL en utilisant
le solveur d'optimisation CPLEX afin de les résoudre, c'est l'objet de
quatrième et dernier chapitre.
Conclusion générale 54
Perspectives
Cependant, ce modeste travail constitue les bases d'un travail
à poursuivre et à améliorer pour une étude beaucoup
plus approfondie qui pourra faire l'objet de plusieurs projets de master et de
thèses de doctorat.
En s'inspirant de ce sujet, plusieurs travaux futurs peuvent
être développés et plusieurs problématiques peuvent
se poser:
· À partir du modèle mathématique
élaboré, une nouvelle modélisation est possible pour
combiner les différentes opérations de manutention des autres
équipements simultanément afin de minimiser le temps de
complétion pour le traitement des conteneurs destinés à
l'exportation.
· L'analyse des données historiques et
l'utilisation de techniques d'apprentissage automatique peuvent contribuer
à une meilleure compréhension des schémas de mouvement des
conteneurs, permettant ainsi une planification plus précise et une prise
de décision éclairée.
· Il est également primordial d'étudier
l'effet de la conception de la zone de stockage (nombre de blocs, nombre des
baies, etc.) sur le temps de complétion. Il s'agit de garder le
même objectif de notre travail, en variant à chaque fois le nombre
de blocs, le nombre de baies, le nombre de portiques de cour et de camions afin
de trouver la conception optimale de la zone de stockage.
-Page 54-
55
1. Présentation de AMPL
AMPL signifie «A Mathematical Programming Language»,
est un langage de modélisation algébrique pour modéliser
et résoudre des problèmes d'optimisation. Il fournit un ensemble
de syntaxes et de commandes spécifiques qui permettent de décrire
efficacement les modèles mathématiques et de les résoudre
à l'aide de solveurs d'optimisation. Il a été
développé par Robert Fourer, David Gay et Brian Kernighan des
laboratoires Bell.
1.1 Historique
|
Année
|
Étape
|
|
1985
|
Conception et mise en oeuvre d'AMPL
|
|
1991
|
AMPL prend en charge la programmation non linéaire
|
|
1995
|
Extensions pour représenter des structures
linéaires et des réseaux
|
|
1995
|
Construction de scripts
|
|
1997
|
Amélioration de la prise en charge des solveurs non
linéaires
|
|
2002
|
Soutien à la programmation par contraintes
|
|
2003
|
Création de la société AMPL Optimization
LLC
|
|
2012
|
Les développeurs ont reçu le prix INFORMS Impact
en tant qu'initiateurs d'un des langages de modélisation
algébrique les plus importants
|
|
2013
|
Un nouvel environnement de développement
intégré multiplateforme pour AMPL
|
TABLE 6 - Tableau des faits saillants d'AMPL.
Annexe 56
-Page 56-
1.2 Caractéristiques
1. Syntaxe intuitive: AMPL utilise une
syntaxe claire et intuitive, basée sur des expressions
mathématiques et des déclarations logiques, ce qui facilite la
formulation des modèles d'optimisation. Le code AMPL ressemble souvent
à une représentation naturelle du problème réel.
2. Déclaration des ensembles: AMPL
permet de déclarer des ensembles pour représenter les
données du problème. Par exemple, vous pouvez définir des
ensembles pour les produits, les clients, les emplacements, etc. Ces ensembles
peuvent être indexés et utilisés pour définir les
variables et les contraintes du modèle.
3. Variables et paramètres: AMPL permet
de déclarer des variables, qui représentent les quantités
à optimiser, ainsi que des paramètres, qui représentent
les données constantes du modèle. Les variables peuvent
être continues ou discrètes, et les paramètres peuvent
être scalaires ou tableaux.
4. Contraintes: AMPL permet de
définir facilement des contraintes qui régissent les relations
entre les variables. Vous pouvez exprimer des contraintes linéaires et
non linéaires à l'aide d'opérateurs mathématiques
standard.
5. Objectifs: Vous pouvez définir un
objectif à optimiser, qu'il s'agisse de maximiser ou de minimiser une
certaine fonction. L'objectif peut être une combinaison linéaire
des variables du modèle ou une fonction non linéaire.
6. Solveurs d'optimisation: AMPL est
compatible avec différents solveurs d'optimisation, tels que CPLEX,
Gurobi, IPOPT, etc. Vous pouvez spécifier le solveur souhaité
dans votre modèle AMPL et exécuter la résolution pour
obtenir une solution optimale.
7. Interface utilisateur: AMPL fournit une
interface utilisateur interactive en ligne de commande, où vous pouvez
charger, résoudre et analyser vos modèles. Il existe
également des interfaces graphiques et des intégrations avec
d'autres langages de programmation, tels que Python, pour faciliter
l'utilisation d'AMPL dans des flux de travail plus complexes.
8. Analyse des résultats: Une fois le
modèle résolu, AMPL permet d'accéder facilement aux
résultats, tels que les valeurs des variables, les valeurs des
contraintes, les coûts réduits, etc. Vous pouvez utiliser ces
informations pour analyser la solution et prendre des décisions
éclairées.
Annexe 57
-Page 57-
1.3 Éléments de base
1. Le langage de programmation AMPL est capable de gérer
différents types de variables tels que les variables entières
(integer), les variables binaires (binary), les variables continues,
2. Les variables de décision sont déclarées
à l'aide du mot clé "var" suivi de leur nom et leur type,
3. Pour définir les ensembles il faut utiliser le mot
clé "set",
4. Pour déclarer les paramètres il faut utiliser
le mot clé "param",
5. La fonction objectif est précédée du mot
clé "minimize" ou "maximize" selon l'objectif d'optimisation suivi de
son nom,
6. Chaque contrainte est précédée du mot
clé "subject to", suivi de son nom et son indice entre deux
accolades,
7. Les principaux opérateurs numériques et
logiques tels que l'addition (+), la soustraction (-), la multiplication (*),
la division (/), la division entière (div) et le modulo (mod) sont pris
en charge, de même que les comparaisons (<=, >= et =),
8. Les commentaires peuvent être encadrés de /* ...
*/ ou précédés de # sur une seule ligne.
9. Toutes les commandes AMPL se terminent par ";" ,
10. Pour réinitialiser ampl (lorsque vous rencontrez des
erreurs) il faut utiliser la commande
"reset",
11. Pour résoudre le modèle il faut d'abord
spécifier le solveur d'optimisation avec le mot clé "option"
suivi de mot "solver" et le nom de solveur, par exemple :
option solver cplex; ensuite il faut utiliser la commande
"solve".
12. Pour afficher les résultats du modèle ainsi
que les valeurs des variables et les valeurs des contraintes il faut utiliser
la commande "display".
1.4 Structure d'un projet AMPL
Un projet AMPL est généralement constitué de
3 types de fichiers:
· Un ou plusieurs fichiers de modèles (.mod),
·
Annexe 58
-Page 58-
Un ou plusieurs fichiers de données (.dat),
· Un ou plusieurs fichiers facultatifs de
l'exécution (.run),
Les sections suivantes présentent ces différents
fichiers dans l'ordre ci-dessus: 1.4.1 Les fichiers
modèle
Les fichiers modèle (.mod) sont le coeur d'AMPL. C'est
dans un fichier modèle qu'on indique les constantes, les variables de
décision, les contraintes, la fonction objectif d'un problème
d'optimisation, et le solveur choisi. Ils sont composés des commandes
suivantes: "set","param","var","minimize", et "subject to".
1.4.2 Les fichiers de données
Les fichiers de données (.dat) sont les fichiers dans
lesquels on définit les valeurs numériques ou les données
du cas d'étude. Ils sont composés des commandes suivantes :
"set", et "param" suivis de " :=".
1.4.3 Les fichiers d'exécution
Les fichiers d'exécution (.run) sont les fichiers dans
lesquels on définit le problème à résoudre (en
faisant notamment appel à un fichier .mod avec la commande "model" et un
fichier .dat avec la commande "data"), et qui est exécuté par
AMPL en faisant un clic droit, et en choisissant l'option "Send To AMPL". On
peut également afficher les valeurs de variables et de contraintes avec
la commande "display"
1.5 Solveur CPLEX
CPLEX est l'un des solveurs d'optimisation les plus puissants
et largement utilisés qui est pris en charge par AMPL. Il est
développé par IBM (International Business Machines Corporation)
et est réputé pour sa capacité à résoudre
des problèmes d'optimisation linéaire, quadratique, mixte entier
et non linéaire.
Voici quelques points clés sur le solveur CPLEX dans AMPL
:
1. Performances élevées: CPLEX
est reconnu pour sa performance et son efficacité dans la
résolution de problèmes d'optimisation complexes. Il utilise des
algorithmes avancés, tels que le simplex primal-dual, l'algorithme du
point intérieur et la recherche locale, pour trouver des solutions
optimales ou de très bonne qualité.
2.
Annexe 59
-Page 59-
Modélisation étendue: CPLEX
dans AMPL prend en charge une large gamme de problèmes d'optimisation, y
compris les problèmes linéaires, quadratiques, non
linéaires, mixtes entiers et continus. Vous pouvez formuler vos
modèles dans AMPL et les résoudre avec CPLEX sans avoir à
effectuer des modifications substantielles du code.
3. Options de résolution
personnalisées: CPLEX offre une gamme d'options de
résolution personnalisables pour répondre aux besoins
spécifiques des problèmes. Vous pouvez ajuster les
paramètres du solveur pour influencer le comportement de la
résolution, tels que la limite de temps, la précision de la
solution, les stratégies de coupes, etc.
4. Heuristiques et coupes: CPLEX utilise des
heuristiques et des coupes pour améliorer l'efficacité de la
résolution. Les heuristiques sont des méthodes de recherche
intelligente qui permettent de trouver rapidement des solutions de bonne
qualité, tandis que les coupes sont des inégalités valides
qui réduisent l'espace de recherche et accélèrent la
convergence.
5. Capacité de gestion des contraintes et des
variables: CPLEX peut gérer des modèles avec un grand
nombre de contraintes et de variables. Il est capable de détecter les
contraintes redondantes, les variables non utilisées et d'exploiter la
structure spécifique du modèle pour améliorer les
performances de résolution.
6. Rapports et diagnostics: Une fois la
résolution terminée, CPLEX fournit des rapports
détaillés sur le processus de résolution, tels que le
nombre d'itérations, les temps d'exécution, les coupes
appliquées, etc. Ces informations peuvent être utilisées
pour analyser la performance du modèle et identifier des
opportunités d'amélioration.
7. Intégration avec AMPL : CPLEX est
intégré à l'environnement AMPL, ce qui facilite
l'utilisation conjointe de ces deux outils. Vous pouvez charger votre
modèle AMPL dans CPLEX, spécifier les options de
résolution et obtenir les résultats de la résolution dans
AMPL pour une analyse et une utilisation ultérieures.
1.5 Étapes de création du projet
1. Tout d'abord il faut créer un projet AMPL dans
lequel on pourra définir notre mo-dèle.Pour cela dans AMPL IDE il
faut cliquer sur File ? New ? File. La figure (5) montre cette étape:
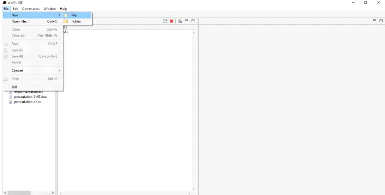
Annexe 60

FIGURE 5 - Schéma de modèle
2. Une fenêtre s'ouvre : entrez un nom de fichier,
choisissez son emplacement (dossier parent) et le type de fichier (.mod pour la
rédaction du modèle, ensuite vous répétez les
mêmes étapes pour le fichier .dat et le fichier .run). La figure
ci-dessus illustre cette étape:
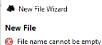
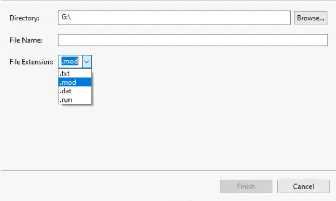
-Page 60-
FIGURE 6 - Nouvel assistant de fichier
[1]
61
J. AH-PINE, «Introduction à AMPL,» Support de
cours en Master 1 Informatique, Université Lumière-Lyon 2,
2016.
[2] Z. AOUDIA, «Optimisation Combinatoire,» Support
de cours en Licence 3 RO, Université Abderrahmane Mira - Béjaia,
2020.
[3] «BMT Support Web.» (Avril 2023), adresse :
https://bejaiamed.cm/.
[4] J. X. CAO, D.-H. LEE, J. H. CHEN et Q. SHI, «The
integrated yard truck and yard crane scheduling problem : Benders
decomposition-based methods,» Transportation Research Part E :
Logistics and Transportation Review, t. 46, no 3, p. 344-353,
2010.
[5] M. CASERTA, S. SCHWARZE et S. VOSS, «Container
rehandling at maritime container terminals,» Handbook of terminal
planning, p. 247-269, 2011.
[6] K. CHEBLI, «Optimisation des Mouvements des Conteneurs
dans un Terminal Maritime,» Thèse de Doctorat, Ecole Polytechnique,
Montréal (Canada), 2011.
[7] Y. CHIROUAL et R. HADDOUCHE, «Optimisation Des Temps De
Manutention Au Niveau De BMT.,» Mémoire de Master,
Université Abderrahmane Mira - Bejaia, 2022.
[8] P. CHRÉTIENNE, «Algorithmes Branch and
Bound,» Support de cours en Master 1 Informatique, Université
Pierre et Marie-Curie - Paris 6, 2009.
[9] D. DAI et R. FERTAS, «Modélisation Et
Optimisation Du Temps De Manutention Au Niveau De Bmt.,» Mémoire de
Master, Université Abderrahmane Mira - Bejaia, 2017.
[10] S. M. DOUIRI, S. ELBERNOUSSI et H. LAKHBAB,
«Méthodes de Résolution Exactes Heuristiques et
Métaheuristiques,» Support de cours en Master Codes, Cryptographie
et Sécurité de l'information, Universite mohammed 5, rabat.,
2008.
[11]
BIBLIOGRAPHIE 62
-Page 62-
K. HALIMI, H. DKHIL, R. MCHICH et A. YASSINE,
«Modélisation en aide à la décision pour une gestion
optimale de stockage dans les terminaux à conteneurs,» Revue
Marocaine de Management, Logistique et Transport, no 3,
2018.
[12] A. IMAI, K. SASAKI, E. NISHIMURA et S. PAPADIMITRIOU,
«Multi-objective simultaneous stowage and load planning for a container
ship with container rehandle in yard stacks,» European Journal of
Operational Research, t. 171, no 2, p. 373-389, 2006.
[13] M. L. KHAIROUNE, «Problème De Stockage Des
Conteneurs,» Mémoire de Master, Université Abderrahmane Mira
- Bejaia, 2019.
[14] L. KHERBOUCHE et Z. OUBAHRI, «Quelques
Méthodes De Résolution En Optimisation Combinatoire,»
Mémoire de Master, Université Mouloud Mammeri - Tizi Ouzou,
2017.
[15] K. H. KIM, «Evaluation of the number of rehandles in
container yards,» Computers and Industrial Engineering, t. 32,
no 4, p. 701-711, 1997.
[16] O. KONÉ, «Nouvelles Approches pour la
Résolution du Problème d'Ordonnancement de Projet à Moyens
Limités,» Thèse de Doctorat, Université Paul
Sabatier-Toulouse III, 2009.
[17] Y. LEE et N.-Y. HSU, «An optimization model for the
container pre-marshalling problem,» Computers and Operations
Research, t. 34, no 11, p. 3295-3313, 2007.
[18] Y. LEE et Y.-J. LEE, «A heuristic for retrieving
containers from a yard,» Computers and Operations Research, t.
37, no 6, p. 1139-1147, 2010.
[19] N. MAHFOUF et B. RAMDANI, «Planification Et
Ordonnancement D'un Projet A Moyens Limités Au Sein De L'engtp,»
Mémoire de Master, Université M'hamed Bougara - Bou-merdes,
2017.
[20] C. PARREÑO-TORRES, R. ALVAREZ-VALDES et R. RUIZ,
«Integer programming models for the pre-marshalling problem,»
European Journal of Operational Research, t. 274, no 1, p. 142-154,
2019.
[21] T. ÜNLÜYURT et C. AYDIN, «Improved
Rehandling Strategies for the Container Retrieval Process,» Journal of
Advanced Transportation, t. 46, p. 378-393, 2012.
[22] Z. WEIYING, L. YAN et J. ZHUOSHANG, «Optimization
model of containers loading operation in export containers terminal,»
WUHAN LIGONG DAXUE XUEBAO JIAOTONG KEXUE YU GIONGCHENG BAN, t. 30,
no 2, p. 314, 2006.
BIBLIOGRAPHIE 63
[23] «ÉTUDE SUR LES TRANSPORTS MARITIMES,»
CONFÉRENCE DES NATIONS UNIES SUR LE COMMERCE ET LE
DÉVELOPPEMENT, t. 33, p. 3, 2022.
-Page 63-
Key words : Maritime terminal, Unproductive
movements, Container handling, AMPL language, CPLEX optimization solver
Résumé
L'objet du présent mémoire consiste à
modéliser et optimiser les mouvements des conteneurs dans un terminal
maritime. La gestion des conteneurs dans ces terminaux peut être complexe
en raison du grand nombre de mouvements impliqués notamment les
mouvements improductifs.
Dans ce mémoire, nous proposons une approche de
modélisation qui permet de représenter une sorte de planification
et de synchronisation des opérations de manutention des conteneurs par
deux équipements importants dans la partie terrestre du terminal;
à savoir les portiques de cour (RTGs) et les véhicules internes
de transport (Camions Portuaires), tout en tenant compte des mouvements de
remanutention des conteneurs par les RTGs (Rehandle).
En outre, nous nous intéressons à la
résolution de ce problème à l'aide du langage AMPL en
utilisant le solveur d'optimisation CPLEX, dans le but de minimiser le temps de
complétion des opérations de manutention des conteneurs
destinés à l'exportation.
Mots clés : Terminal maritime,
Mouvements improductifs, Manutention des conteneurs, Langage AMPL, Solveur
d'optimisation CPLEX
Abstract
The aim of this dissertation is to model and optimize
container movements in a maritime terminal. Container management in these
terminals can be complex due to the large number of movements involved,
particularly unproductive movements.
In this dissertation, we propose a modeling approach that
allows for a kind of planning and synchronization of container handling
operations by two important equipment in the land-side of the terminal :
Rubber-Tired Gantry Cranes (RTGs) and Internal Transport Vehicles (Port
Trucks), while considering the rehandling movements of containers by RTGs.
Furthermore, we focus on solving this problem using the AMPL
language and the CPLEX optimization solver, with the objective of minimizing
the completion time of container handling operations for export.
| 

