CHAPITRE 1
l'intelligence artificielle en général, et plus
précisément et au traitement de l'information et à la
prise de décisions.
Nous pouvons distinguer dans la littérature plusieurs
problématiques qui se chevauchent et qui constituent chacune un axe de
recherche très actif dans la communauté:
1.4.1 La navigation
La navigation est l'une des problématiques de base dans
le domaine de la robotique. Elle soulève la question de comment
permettre à un robot de se déplacer tout en évitant les
collisions avec les obstacles présents dans son environnement.
Un obstacle peut être de nature statique comme les murs
et les objets. Il peut aussi être de nature dynamique comme les
êtres humains, les véhicules et les autres robots.
L'axe de recherche de la navigation s'intéresse
à la modélisation géométrique des robots et de leur
mode de déplacement, les degrés de liberté d'un robot, et
les techniques de détection et d'évitement d'obstacles.
La modélisation géométrique du robot est
essentielle pour pouvoir contrôler sa vitesse et sa direction de
mouvement. Un robot à roues ne se déplace pas de la même
manière qu'un drone volant ou qu'un robot à deux pieds. Cette
modélisation peut aussi varier pour des robots de même type selon
leur nombres de moteurs, leur forme et le nombre de degrés de
liberté qu'ils possèdent.
La navigation nécessite également de pouvoir
mesurer l'accélération du robot, qui est souvent obtenue en
calculant le nombre de rotations des roues pour les robots de type
véhicule par exemple, mais elle nécessite l'utilisation de
dispositifs électroniques plus complexes pour les robots volants tels
qu'un gyroscope pour mesurer l'orientation, un altimètre pour mesurer
l'attitude et un accéléromètre pour mesurer
l'accélération.
D'autres dispositifs doivent aussi être utilisés
pour l'évitement d'obstacles, il s'agit souvent de capteurs de distance
de type laser, ultrason ou infrarouge pour pouvoir construire un histogramme de
distances et choisir une direction de mouvement sans danger. Mais on peut aussi
utiliser des méthodes plus complexes comme des caméras 2D ou 3D
pour la reconnaissance d'objets, qui s'avèrent utiles lorsqu'il est
nécessaire d'interagir avec l'obstacle en question (ouverture de portes
par exemple, collecte d'objets...etc.).
Dans un système multirobots, chaque agent
considère les autres robots comme des obstacles à éviter.
Toutefois, dans un scénario de déplacement en groupe la
navigation devient plus compliquée car elle prend en
considération des critères supplémentaires dont la
distance maximale autorisée entre chaque robot, la vitesse des robots
à proximité, et leur direction de mouvement. Un scénario
typique est le déplacement en formation où les robots se
déplacent en suivant les mouvements d'un robot leader, ou bien en
essayant de garder une certaine formation (ligne droite, cercle,
triangle...etc.). Lorsque les robots rencontrent un obstacle, ils sont souvent
obligés de rompre la formation pour l'éviter, ils doivent ensuite
retourner à la formation initiale en réajustant leurs vitesses et
positions.
31
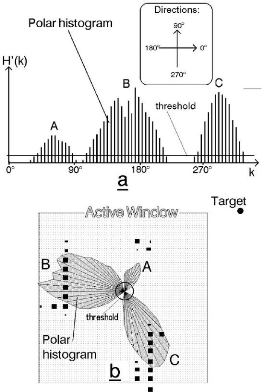
FIGURE 1.8 - Détection d'obstacles en
utilisant la technique du Vector Field Histogram [20]
1.4.2 La cartographie
La problématique de cartographie tente de
répondre à la question « à quoi ressemble
l'environnement? ». Le but est de permettre à un robot de
créer un modèle interne de son environnement à partir de
ses observations.
Ce processus de modélisation représente l'espace
qui entoure le robot dans une structure de données qui permettra de
faciliter les autres opérations tel que la planification des
trajectoires, distribution de tâches, et localisation des points
d'intérêts. Cela permet aussi d'optimiser la navigation puisque le
robot pourra savoir à l'avance la position des obstacles qu'il faudra
éviter.
Afin de pouvoir créer une carte de l'environnement, le
robot devra traduire les observations récoltées en données
utiles. Ces observations sont souvent obtenues soit en utilisant des
dispositifs électroniques de mesure de distances
(télémètres, radars...) qui permettent de calculer
rapidement et avec grande précision l'emplacement des obstacles dans un
rayon
32
| 

