CHAPITRE 1
Emergence de comportement
C'est le fruit d'accumulation de plusieurs actions
effectuées par un ensemble d'agents agissant de manière
séparée en suivant des règles simples, mais qui
résulte en la réalisation d'une tâche commune et souvent
complexe. La coordination émerge donc à partir d'un travail
collectif même si elle n'était pas intentionnelle à
l'échelle individuelle.
On retrouve ce genre de comportement dans les essaims de
robots inspirés à partir de colonies d'insectes et d'animaux
sociaux, pour réaliser des tâches de collecte de nourriture par
exemple.
1.3.2 Classification par type de synchronisation
Il est possible de classer la synchronisation des systèmes
multirobots en deux types: Synchronisation implicite
Ce mode se base sur l'échange de données de
manière indirecte en utilisant une mémoire partagée
stockée sur un serveur central. Elle est souvent utilisée dans le
but d'éviter le chevauchement entre les actions réalisées
par plusieurs robots sans nécessiter une communication directe entre
eux. Les robots dans ce type de scénarios ne sont pas forcément
conscients de l'existence des autres robots, ils peuvent tout de même
profiter des informations récoltées par ceux-ci en consultant les
données stockées sur le serveur.
Ce type de synchronisations est largement utilisé dans
des travaux d'exploration et de recherche de survivants où le serveur
combine les données des zones explorées par chaque robot, puis
les redistribuent aux robots pour leur permettre d'éviter de
réexplorer une zone qui a déjà été
visitée par un autre robot auparavant.
Synchronisation explicite
Ce type concerne l'échange de messages directs entre
les robots pour se partager des informations et diviser le travail. Cette
communication permet d'effectuer une coordination proactive en permettant aux
robots de décider d'une stratégie commune qui maximise les gains
du groupe.
Un cas concret de ce type de synchronisation est
l'échange d'actions futures planifiées par les robots telles que
les trajectoires de déplacement afin d'éviter les collisions, ou
l'échange d'informations sur leurs états internes (comme le
niveau de batterie disponible) afin de négocier la distribution de
tâches de manière optimale.
1.3.3 Classification par type d'architecture du système
On peut classer les architectures des systèmes
multirobots en 3 catégories principales: 24
Système centralisé
Il s'agit d'un ensemble de robots communiquant avec un noeud
central dont le rôle est de gérer le groupe en envoyant des ordres
à chaque robot, ou en combinant les données collectées par
ceux-ci. Ce noeud central peut être un serveur distant, ou un robot
leader qui évolue dans le même environnement que les autres
robots, et possède généralement des capacités de
calcul et de stockage largement supérieur aux robots
exécutants.
Il constitue le point le plus fragile du système
puisque ce dernier ne sera plus opérationnel si la communication avec ce
noeud est interrompue ou si celui-ci tombe en panne. Une pratique courante pour
diminuer ce genre de risque dans les systèmes critiques est de miser sur
la redondance de ce noeud. Ceci permet de renforcer la robustesse du
système tout en gardant l'avantage de cette topologie qui se
caractérise par sa simplicité et la disponibilité de
toutes les informations au même endroit; le noeud central possède
une vue d'ensemble sur l'état de tous les robots, des actions
effectuées, et de l'avancement de la mission, et pourra planifier de
manière efficace la distribution des tâches.
25
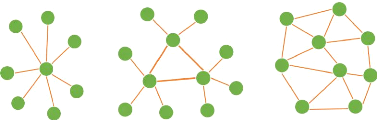
(a) Centralisé (b) Décentralisé (c)
Distribué
FIGURE 1.6 - Types d'architectures de
systèmes multirobots
Système décentralisé
Dans un système décentralisé, il n'y a
pas un seul noeud central, mais plutôt plusieurs petits noeuds centraux
dont chacun est responsable de gérer un groupe de robots. Ces noeuds
centraux communiquent entre eux pour se synchroniser, mais restent
indépendants dans les décisions et choix des tâches
à affecter aux robots de leurs équipes respectives.
L'avantage d'un tel système est de ne pas
posséder un seul point de défaillance (Single point
offailure) puisque chaque équipe est indépendante des
autres. Par ailleurs, il est possible de réaffecter les équipes
de sorte à ne pas pénaliser une équipe entière si
son noeud central n'est plus opérationnel.
Ces points centraux jouent souvent le rôle de relais de
communication dans les scénarios nécessitant le
déploiement de robots dans une zone à large surface, ce qui
permet d'éviter l'isolement d'un robot si son rayon de communication est
trop loin du noeud central.
26
| 

