CHAPITRE 4
4.1 Introduction
Ce chapitre présente la série
d'expériences effectuées afin de valider notre
modélisation du problème d'exploration et évaluer les
performances de l'algorithme xBOA.
Nous utiliserons notre plateforme de benchmarking afin de
comparer les performances de cet algorithme avec les différentes
métaheuristiques incluses dans le simulateur (GA, ACO, PSO, CMAES, GWO,
ABC) pour la résolution du problème d'exploration de zones
inconnues. Nous comparerons également les performances du xBOA avec
l'algorithme BOA original et ses autres variantes (MBOA, SABOA, ABOA).
Nous analyserons ensuite les résultats d'une
série d'expériences visant à accélérer la
vitesse d'exécution de l'algorithme tout en analysant la robustesse des
méthodes citées face à la réduction de la taille de
la population.
Nous présenterons aussi une expérience pour
évaluer l'adaptabilité de notre approche dans un contexte
multirobots. Le but étant de valider les capacités du
modèle à pouvoir générer un comportement collectif
pour les robots sans besoin d'intégrer des mécanismes de
synchronisation explicite. Pour finir, nous testerons l'approche sur un robot
réel.
4.2 Configuration matérielle
Dans le but d'effectuer les expériences souhaitées,
nous avons utilisé trois machines.
La première consiste en un ordinateur portable de
moyenne gamme avec une mémoire vive de 8Go et un processeur Intel i7
de 4ème génération. Ce processeur possède 4
cores ayant chacun une fréquence d'horloge de 2.8Ghz. Bien que cet
ordinateur inclut aussi une carte graphique, celle-ci n'a pas été
utilisée pour les raisons citées dans la section 3.2.2, ainsi que
le fait que les deux autres machines utilisées pour effectuer les
expériences ne possédaient pas de capacités de calcul
graphique.
La deuxième machine utilisée consiste en un
service cloud de Google appelé Collabora-tory (ou Google
Colab) offrant une machine virtuelle utilisant un processeur Intel
Xeon de 2 cores cadencés à 2.3Ghz avec une mémoire
vive de 12Go. L'utilisation de ce service est gratuite pour des sessions de
calcul dont la durée est inférieure à 12h.
La troisième machine utilisée consiste en un
cluster disponible au Plateau Technique de Calcul Intensif IBN-BAJA
à l'Université des Sciences et de la Technologie d'Oran
Mohamed Boudiaf - USTOMB. Ce cluster destiné à effectuer des
calculs à hautes performances (High Performance Computing)
possède une mémoire vive de 32Go et 24 processeurs Intel
Xeon de 6 cores chacun cadencés à 2Ghz. Ce cluster nous a
permis d'effectuer des sessions de simulation de longue durée en
répétant la même expérience plusieurs fois.
Chaque machine utilise un système d'exploitation
différent. Le code a été déployé sur ces
machine sans nécessiter de changement ou de compilation, ce qui a
démontré la portabilité de notre simulateur sur des
systèmes de type Linux et Windows. Le code n'a pas encore
été testé sur un système de type iOS mais ne
devrait présenter aucun problème de compatibilité.
107
4.3 Expérience 1: Évaluation de l'algorithme
xBOA dans un contexte multirobots
La série d'expériences présentée
dans cette section vise à valider l'adaptabilité de l'ap-proche
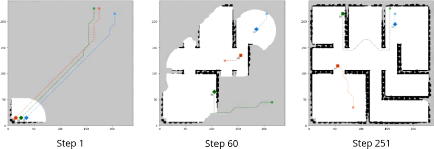
dans un scénario multirobots. Selon ce que l'on peut observer sur la
figure 4.1, les robots déployés à partir de la même
position de départ ont pu se disperser dans l'environne-ment pour
explorer la surface entière sans aucun changement nécessaire dans
l'algorithme pour coordonner leurs déplacements. Ceci montre la
flexibilité de la modélisation proposée pour s'adapter aux
scénarios mono et multirobots.
En effet, chaque robot possède sa propre population de
solutions candidates et essaie de maximiser sa propre valeur de fitness
indépendamment des autres robots. Ces robots n'échangent pas de
messages entre eux, mais collaborent passivement en modifiant une carte globale
qui est stockée dans une mémoire centrale. Lorsqu'un robot se
déplace, il met à jour cette carte partagée afin d'y
insérer les obstacles détectés et marquer la zone
observée comme étant visitée. Les autres robots vont donc
automatiquement éviter cette
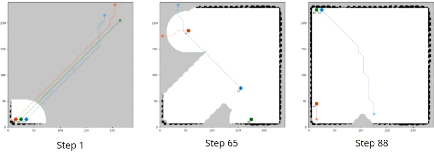
(a) Environnement Empty Map
(b) Environnement House Map
FIGURE 4.1 - Progression visuelle du scenario multirobots en
utilisant la méthode xBOA avec 3 robots
108
| 

