CHAPITRE 1
-- Le nettoyage de zones contaminées ou dangereuses;
-- L'accomplissement d'opérations agricoles dans les
fermes intelligentes;
-- La recherche et localisation de survivants lors des
catastrophes naturelles;
-- La gestion des entrepôts de marchandises;
-- Le déplacement de conteneurs dans les ports;
-- L'inspection des conduits souterrains, pipe-lines,
canalisations et fonds marins;
-- Le divertissement tel que la dance coordonnée de
robots, les spectacles de lumière et les compétitions de football
robotique;
-- La surveillance et détection d'intrus;
-- Le déploiement de capteurs lors des expéditions
scientifiques, tel que les études climatologiques, environnementales et
écologiques;
-- Ainsi que d'autres applications militaires tel que
l'espionnage et la télésurveillance.

FIGURE 1.3 - Utilisation de robots pour la gestion portuaire
(système Kalmar AutoStrad [33])
L'utilisation de ces systèmes offre plusieurs avantages
tels que l'augmentation de la productivité industrielle et agricole,
l'accélération de tâches de sauvetage et lutte contre les
incendies, le renforcement de la fiabilité des systèmes
sécuritaires, l'élargissement de la surface de couverture dans
les systèmes de surveillance, ainsi que la possibilité à
effectuer des tâches impossibles à faire en utilisant un seul
robot.
21
De plus, l'utilisation de ces systèmes permet parfois
aussi de diminuer les coûts de production par rapport à
l'utilisation d'un seul robot, bien que cette idée puisse paraître
contre-intuitive. En effet, il est parfois moins coûteux de fabriquer
plusieurs petits robots bon marché avec des capacités
limitées au lieu d'un seul robot complexe et sophistiqué.
D'autant plus que la consommation énergétique d'un robot peut
augmenter rapidement avec l'augmentation de sa puissance de calcul et poids
maximal à déplacer. Afin de palier à ce type de
problèmes, certains chercheurs se sont basés sur la distribution
de charge entre plusieurs petits robots qui travaillent ensemble au lieu
d'investir sur l'augmentation de la capacité d'un seul robot.
D'un autre côté, les systèmes multirobots
permettent d'augmenter la robustesse du système en évitant
l'inconvénient du point de défaillance unique ({Single
point of failure}). Par exemple, dans un scénario de sauvetage ou
d'exploration d'une zone dangereuse, il est beaucoup moins grave qu'un ou
plusieurs petits robots tombent en panne tant que les autres robots restent
opérationnels, comparé à la situation où un seul
robot complexe est déployé risquant d'entraîner
l'échec automatique de la mission s'il tombe en panne ou se retrouve
bloqué dans les débris.
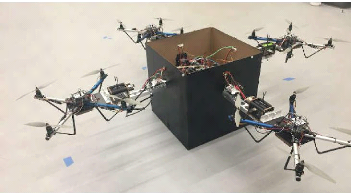
FIGURE 1.4 - Exemple d'un scénario
où un groupe de robots s'entraident pour déplacer un objet lourd
(Université Georgia Tech)
Il existe toutefois des inconvénients à utiliser
ce genre de systèmes : la nécessité à
intégrer des moyens de communication entre robots entraîne
l'augmentation de la complexité des logiciels et la
nécessité à intégrer des dispositifs
électroniques supplémentaires (Wifi, 4G/LTE, GPS...) qui peuvent
être lourds en consommation énergétique. L'ajout de ces
éléments engendre l'augmentation des coûts de production
ainsi que la consommation énergétique des robots, notamment dans
les situations où le rayon de communication est large.
Un autre problème est la nécessité
d'inclure des mécanismes de coordination et/ou collaboration entre les
robots pour éviter le chevauchement entre les tâches
effectuées, ou encore l'implémentation de processus de prise de
décision collective. Ces fonctionnalités additionnelles
entraînent souvent le recourt à l'augmentation de la puissance de
calcul des
22
| 

