Annexe
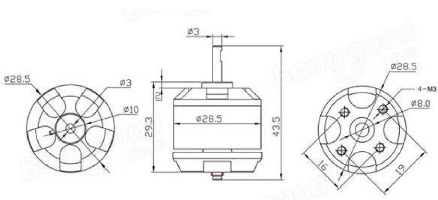
Diamètre du moteur :
Annexe
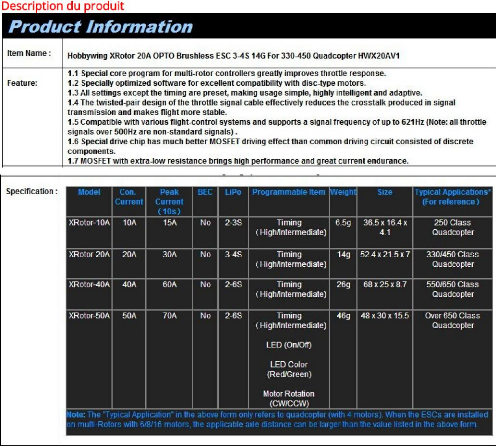
3. Caractéristiques de l'ESC Hobbywing XRotor 20A
OPTO :
ÉÕ?ÎÑ
ÑÇÚÔÊÓÇ
ÉÒÌæ
É?äæÑÊßáÅ
ÊÇäæßã
ãÇÏÎÊÓÇÈ
ÑÕáÇ äã ÚÏáÇ
É?ÚÇÈÑ ÑÇ?Ø
äæÏÈ æ ÑÇ?Ø
äæÏÈ ÉÑÆÇØ
ÁÇÔäÇ æ
áãÚáÇ ÇÐ äã
ÏáÇ äÇß
:ÕÎáã
ÉßÑÍ ??
ãßÍÊáÇ äã
äßãÊáá
ÒÊÑÇÛ?Ì 2.4
ÊÇÈÐÈÐ ??? áãÚÊ
Éäã?Ç
É?ßáÓ?áÇ
Ê?ÇÕÊ?á æ?ÏÇÑ
ÉÏÍææ ÑæÇÍã
Ë?Ë æÐ ÈæßÓæ
Ñ?Ì æä?æÏÑ?Ç
áËã äãËáÇ
|
?? íæ?ÏÇÑáÇ
|
ãßÍÊáÇ
ÉÏÍæ äã
|
?????? ÁÇÒÌ
ÌÐæãä
|
ã?ãÕÊ
|
??
|
ÊÏÈæ
ãÇÙäáÇ ÇÐ
|
Ð?äÊ áÍÇÑã
|
???? ÊÍÖæ
ÉÑøßÐãáÇ åÐ ??
.ãáß
|
2 íáÇæÍ
ÏÚÈ äÚ
ÉÑÆÇØáÇ
|
|
ÏÑ
ÉÑÆÇØáá
|
äæß? ???
íæ?ÏÇÑáÇ
áÇÈÞÊÓ?Çæ
áÇÓÑ?Ç
|
??
|
ÉãÏÎÊÓãáÇ
|
ÊÇ?ãÒÑÇæÎáÇ
|
ÊÍÑÔ
|
ÉÌãÑÈáÇ
ÁÒÌá ???????
|
Çã
|
.ÉãÒ?áÇ
|
áÇßÔ?Çæ
|
É?äÇ?ÈáÇ
ãæÓÑáÇ
Í?ÖæÊ
|
|
ÌãÇäÑÈáÇ
|
???
|
íæÊÍÊ
|
íÊáÇ
|
ÊÇæØÎáá
|
????
|
ÇÍÑÔ
|
Ê?ØÚ
|
ßáÐ
|
ÏÚÈ
ÑÇ?ØáÇ ÑØ äã
ãÏÎÊÓãáÇ
æ?ÏÇ øÑáÇ
ãßÍÊã äã
ÉÑÏÇÕáÇ
ÑãÇæ?Ç äã
|
ÈÓÇäã
|
áÚ
|
ÈæßÓÑ?ÌáÇ
äã ÉÑÆÇØáÇ
ÇÑÍäÇ Ç?ÇæÒ
ÊÇäÇ?È ÉÁÇÑÞ
Þ?ÑØ äÚ
ÉÑÆÇØáÇ
ÇÑÍäÇ Í?ÍÕÊæ
ÈÇÓÍ áËã
ÉÑÆÇØáÇ
ÉáÍÑ ??
ãßÍÊáá
É?Ó?ÆÑáÇ
ÊÇø?ãÒÑÇæÎáÇæ
.ÉáÍÑáÇ
ÉÁÇß ???
áæÕÍáÇæ
ÉÑÆÇØáÇ
ÚÖæãÊ ÁÇØÎ ??????
íæ?ÏÇÑáÇ
ãßÍÊãáÇ
ÑãÇæ ÊÇäÇ?ÈÈ
ÇÊäÑÇÞãæ
Abstract: This work was carried out as part
of the master's thesis, which the objective was the design and production of a
quadrotor UAV drone with the six-channel radio controller, using only
inexpensive electronic components such as the Arduino, a 3-axis gyroscope
MPU6050 and a radio module (NRF24L01) at 2.4 GHz for the realization of the
appropriate transmitter and RF receiver. The Both of quadrotor and transmitter
frames were built with ultra polyamide nylon using a 3D printer. In this
thesis, I mentioned all the stages of the implementation of this system, after
a brief introduction on drones, with the citation of the different standards
and research work carried out in this area, I started to model the different
parts of the system through the instrumentation it contains the quadrotor and
the radio control unit with the illustration of the diagrams and figures
required. Regarding the programming part, I first explained the algorithms used
in the RF transmitter and receiver in order to have an adequate reaction from
the quadrotor to the commands sent by the pilot. After that, I gave a detailed
explanation on the different stages which contains the main program of the
flight controller such as: Reading the PWM signals coming from the receiver,
Reading the angular data coming from the Gyroscope, Calculating the PID
corrections, Calculates pulses for each ESC and sends calculated pulses to the
ESCs.
Résumé: Ce travail a
été réalisé dans le cadre de la thèse de
maîtrise, dont l'objectif était la conception et la production
d'un drone quadrotor UAV avec le contrôleur radio à six canaux, en
utilisant uniquement des composants électroniques bon marché tels
que l'Arduino, un gyroscope 3 axes MPU6050 et un module radio (NRF24L01)
à 2,4 GHz pour la réalisation de l'émetteur et du
récepteur RF appropriés. Les deux cadres du quadrotor et de
l'émetteur ont été construits en nylon ultra polyamide
à l'aide d'une imprimante 3D. Dans cette thèse, j'ai
évoqué toutes les étapes de la mise en oeuvre de ce
système, après une brève introduction sur les drones, avec
la citation des différentes normes et travaux de recherche menés
dans ce domaine, j'ai commencé à modéliser les
différentes parties du système à travers l'instrumentation
contient le quadrotor et la radiocommande avec l'illustration des
schémas et figures nécessaires. Concernant la partie
programmation, j'ai d'abord expliqué les algorithmes utilisés
dans l'émetteur et le récepteur RF afin d'avoir une
réaction adéquate du quadrotor aux commandes envoyées par
le pilote. Après cela, j'ai donné une explication
détaillée sur les différentes étapes qui
contiennent le programme principal du contrôleur de vol telles que:
lecture des signaux PWM provenant du récepteur, lecture des
données angulaires provenant du gyroscope, calcul des corrections PID,
calcul des impulsions pour chaque ESC et envoie des impulsions calculées
aux ESC.
Zusammenfassung: Diese Arbeit wurde im Rahmen
der Masterarbeit durchgeführt, deren Ziel das Design und die Produktion
einer Quadrotor-UAV-Drohne mit dem Sechs-Kanal-Funkcontroller war, wobei nur
kostengünstige elektronische Komponenten wie das Arduino, ein
3-Achsen-Gyroskop MPU6050 und verwendet wurden ein Funkmodul (NRF24L01) mit 2,4
GHz zur Realisierung des entsprechenden Senders und HF-Empfängers. Die
Quadrotor- und Senderrahmen wurden unter Verwendung eines 3D-Druckers aus
Ultra-Polyamid-Nylon hergestellt. In dieser Arbeit erwähnte ich alle
Phasen der Implementierung dieses Systems. Nach einer kurzen Einführung in
Drohnen und unter Berufung auf die verschiedenen Standards und
Forschungsarbeiten in diesem Bereich begann ich, die verschiedenen Teile des
Systems zu modellieren Die Instrumentierung enthält den Quadrotor und die
Funksteuereinheit mit der Abbildung der erforderlichen Diagramme und
Abbildungen. In Bezug auf den Programmierteil habe ich zunächst die im
HF-Sender und -Empfänger verwendeten Algorithmen erläutert, um eine
angemessene Reaktion des Quadrotors auf die vom Piloten gesendeten Befehle zu
erzielen. Danach gab ich eine detaillierte Erklärung zu den verschiedenen
Stufen, die das Hauptprogramm des Flugreglers enthalten, wie zum Beispiel:
Lesen der vom Empfänger kommenden PWM-Signale, Lesen der vom Gyroskop
kommenden Winkeldaten, Berechnen der PID-Korrekturen, Berechnen von Impulsen
für jeder ESC und sendet berechnete Impulse an die ESCs.
Özet: Bu çaliþma, sadece
Arduino, 3 eksenli bir jiroskop MPU6050 gibi ucuz elektronik bileþenler
kullanilarak, alti kanalli radyo kontrolörü ile bir quadrotor HA
uçaðinin tasarimi ve üretimi olan yüksek lisans tezinin
bir parçasi olarak gerçekle°tirildi. uygun verici ve RF
alicisinin gerçekle°tirilmesi için 2,4 GHz'de bir radyo
modülü (NRF24L01). Dörtlü ve verici
çerçevelerinin her ikisi de bir 3D yazici kullanilarak ultra
poliamid naylon ile yapilmi°tir. Bu tezde, bu sistemin uygulanmasinin tüm
a°amalarindan bahsetmi°tim, dronlar üzerine kisa bir giri°ten sonra, bu
alanda yapilan farkli standartlarin ve ara°tirma çali°malarinin
gösterilmesi ile sistemin farkli bölümlerini modellemeye
ba°ladim. enstrümantasyonda gerekli diyagramlari ve °ekilleri
gösteren dörtlü ve radyo kontrol ünitesini içerir.
Programlama kismi ile ilgili olarak, önce kuadrotordan pilot tarafindan
gönderilen komutlara yeterli bir tepki vermek için RF vericisi ve
alicisinda kullanilan algoritmalari açikladim. Bundan sonra, uçu°
kontrolörünün ana programini içeren farkli a°amalarda
ayrintili bir açiklama yaptim: Alicidan gelen PWM sinyallerinin
okunmasi, Jiroskoptan gelen açisal verilerin okunmasi, PID
düzeltmelerinin hesaplanmasi, her ESC ve hesaplanan darbeleri ESC'lere
gönderir.
| 

