Chapitre 4
Tests et résultats
Chapitre IV Tests et résultats
64
Chapitre IV : Tests et résultats
IV.1. Introduction :
Dans ce chapitre, le but est de donner une description des
différents tests effectués sur le système tels que le test
des angles du Gyro et les signaux de sortie du récepteur RF. Je
présenterai également les techniques utilisées pour
définir les gaines PID adapté à ce quadrotor puis les
résultats obtenus seront utilisés dans le sous-programme de
contrôleur PID, afin d'avoir la stabilité
désirée.

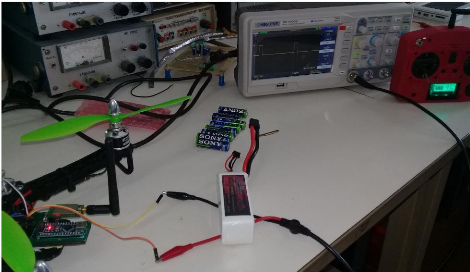
Figure 4.1 : Image du quadrotor
réalisé.
IV.2. Test des signaux du récepteur RF :
Afin d'éviter tous problèmes de
disfonctionnement et pour s'assurer qu'on a une bonne communication radio, il
est donc nécessaire de tester les impulsions reçus par le
récepteur RF du quadrotor.
On commence par alimenter le récepteur RF avec 5v
séparément au circuit du contrôleur de vol, puis on
connecte le canal de sortie Throttle du récepteur au canal CH1 de
l'oscilloscope digital pour visualiser le signal reçue Figure
4.2.
Chapitre IV Tests et
résultats
65
Figure 4.2 : Connexion du récepteur RF à
l'oscilloscope digital.
Le signal PWM qui correspond à la commande Throttle
apparaisse sur l'écran de l'oscilloscope avec une période de
50Hz, Figure 4.3.
Calibre de l'oscilloscope : Tension : 1 Div ? 2
volt Base de temps : 1 Div ? 2.5 ms.
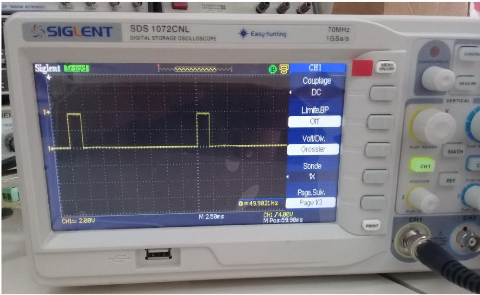
Figure 4.3 : Signal PWM 50Hz de la commande
Throttle.
Chapitre IV Tests et
résultats
66
En agissant sur la position du joystick de la commande
Throttle du transmetteur, on voie bien que la largeur de l'impulsion PWM varie
de 1ms à 2ms, Figure 4.4 et Figure
4.5. La même procédure de test est effectuée pour
les signaux de commande Roll, Pitch et Yaw.
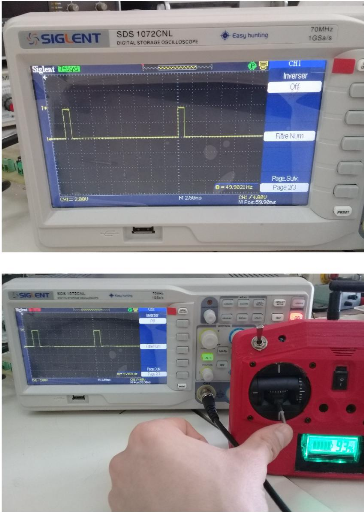
Figure 4.4 : Largeur d'impulsion 1ms.
Figure 4.5 : Largeur d'impulsion 2ms.
Chapitre IV Tests et
résultats
67
IV.3. Test des données angulaires du Gyroscope
:
Nous vérifions les angles de l'IMU pour éviter
les problèmes de commande et les mouvements non désirés,
pour ce faire j'ai introduit l'instruction Serial.print ( ); dans le
sous-programme de lecture des données Gyro MPU6050. Cette instruction
permet d'afficher les angles d'inclinaison du quadrotor en degré pour
les axes Pitch, Roll et Yaw sur le moniteur série de L'Arduino IDE, le
processus est illustré dans la Figure 4.6.
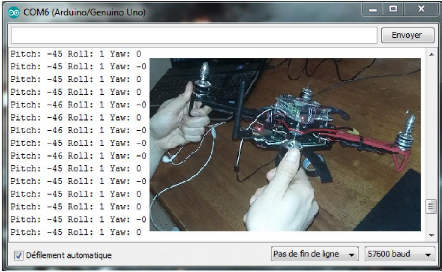
Figure 4.6 : vérification des angles de Gyro sur
l'Arduino IDE.
Le quadrotor est incliné suivent les 3 axes de
mouvement citées en haut. On vérifie si les angles correspondent
au mouvement du quadrotor sont compatible avec la norme mentionné au
Chapitre III page (48) que j'ai utilisée pour ce
contrôleur de vol.
| 

