Chapitre III Conception et mise en oeuvre du
fonctionnement
43
III.4.3. Test des signaux de sortie du récepteur RF
:
Après la construction de l'émetteur RC et du
récepteur, nous devons tester les signaux de contrôle PWM sortant
du récepteur car ce sont les impulsions de commande à introduire
au contrôleur de vol. On peut connecter les broches numériques de
sortie du récepteur RF au canal d'entré d'un oscilloscope afin
que nous puissions visualiser un seul signal PWM puis on fait varier les
positions des joysticks.
Pour voir la variation des quatre signaux tous à la
fois, j'ai utilisé un petit programme de test pour Arduino qui apporte
les valeurs des signaux de commandes PWM sur le moniteur série de
l'Arduino IDE, ces valeurs vont de 1000ìs jusqu'à 2000ìs
avec une impulsion centrale de 1500ìs, Figure 3.20.
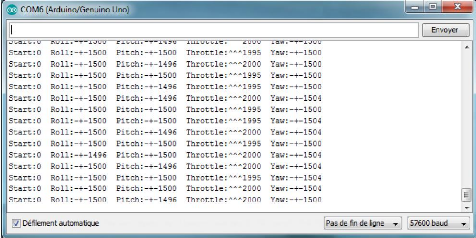
Figure 3.20 : Valeurs correspondantes aux signaux PWM
afficher sur le moniteur série de l'Arduino IDE.
| 

