|
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET
POPULAIRE
Ministère de l'Enseignement Supérieur et de la
Recherche Scientifique
Université des Sciences et de la Technologie
Houari Boumediene

Faculté d'Electronique Et
Informatique
Département Instrumentation et Automatique
Mémoire de Projet de Fin d'Etudes
Master en
Electronique
Option : Ingénierie de L'Electronique et
Photonique Appliquée
THEME
Conception et Réalisation d'un quadrotor
UAV
Proposé par : Présenté par :
Mr. BOUDJIT KAMEL. ZITOUNI Abdelhak Amine.
Examinateurs: Président de jury:
Dr. T.BERABAR. Mr. M.Derras.
Dr. B.LEHOUIDJ.
Promotion : JUIN 2018

Remerciements
Je remercie Dieu, le tout puissant, pour m'avoir
donné, le courage, la patience, la volonté et la force
nécessaire, pour affronter toutes les difficultés et les
obstacles, qui se sont hissés au travers de mon chemin d'études.
Mes plus profonds remerciements vont à mes parents. Tout au long de mon
cursus, ils m'ont toujours soutenu, encouragé et aidé. Ils ont su
me donner toutes les chances pour réussir. Qu'ils trouent, dans la
réalisation de ce travail, l'aboutissement de leurs efforts ainsi que
l'expression de ma plus affectueuse gratitude.
J'adresse mes sincères remerciements à tous
mes enseignants de L'université, notamment à mon promoteur Mr.
Boudjit Kamel, d'avoir proposé le sujet sur lequel j'ai
travaillé, et qui a assuré la direction et l'encadrement du
travail présenté dans ce mémoire.
Je tiens aussi à exprimer mes remerciements
à mon oncle Pr. Tahraoui Abdelatif (Professeur En Faculté De
physique), d'avoir bien voulu de me faire profiter pleinement de ces
compétences scientifiques et de ses idées durant mes
années d'étude en USTHB.
Cette page ne serait être complète sans
remercier mes meilleurs collègues et frères :
T. Idriss, T. Boualem, Z. Krimo, T. Zakou et sans oublier
ma grande soeur Kheznadji.S, sans leurs soutiens je n'aurais sûrement pas
pu mener à bien ce projet.
Enfin, Je tiens notamment, à adresser l'expression
de ma sincère reconnaissance aux membres du jury d'examen, pour
l'intérêt qu'ils ont porté à ce travail. Mes
remerciements vont à tous ceux qui m'ont soutenu de près ou de
loin à réussir ce travail.
Mes vives salutations.

Sommaire
Sommaire
Liste des figures
Introduction générale
1
Chapitre I : Généralité sur les
drones 3
I.1. Introduction aux drones (U.A.V.) 3
I.2. L'historique des drones 3
I.3. Les différentes catégories des drones
4
I.3.1. Les drones militaires de longue endurance
4
· Les drones MALE « le General Atomics MQ-9 »
4
· Les drones HALE « RQ-170 Sentinel » 5
I.3.2. Les drones tactiques (Tactical Unmanned Air
Vehicle) 6
I.3.3. Le drone solaire « Aquila»
7
I.3.4. Les drones miniatures 7
I.3.1. Le robot animal volant « BAT BOT B2 »
8
I.4. Domaines d'application des quadrotors 9
I.4.1. Domaine de sécurité 9
I.4.2.Domaine civil 10
I.5. Description général du quadrotor
10
I.6. Les mouvements du quadrotor 11
I.7. Conclusion 15
Chapitre II : Modélisation dynamique d'un
quadrotor 16
II.1. Introduction 16
II.2. Modèle dynamique du quadrotor
16
II.2.1. Angle d'Euler 17
II.2.2. Vitesses angulaires 18
II.2.3. Vitesses linéaires 18
III.5. Contrôleur de vol du quadrotor :
43
III.5.1. Lecture des signaux du récepteur RF : 45
Sommaire
II.2.4. Effets physiques agissants sur le quadrotor 18
II.2.4.1. Les forces 18
II.2.4.2. Les moments 19
II.2.4.3. Effet gyroscopique : 20
II.2.5. Développement du Modèle mathématique
selon Newton-Euler 20
II.2.5.1. Equations de mouvement de translation : 22
II.2.5.2. Equation de mouvement de rotation : 22
II.2.6. La représentation d'état du système
: 24
II.7. La dynamique des rotors 25
II.3. Conclusion : 27
Chapitre III : Conception et mise en oeuvre du
fonctionnement 28
III.1. Introduction : 28
III.2. Description du hardware utilisé :
28
III.2.1. Arduino Uno : 28
III.2.2. Gyroscope MPU-6050 : 29
III.2.3. Les moteurs sans balais « Brushless » : 29
III.2.4. Electronique Speed Controller « ESC » : 30
III.2.5. Batterie LIPO : 31
III.2.6. Les hélices : 32
III.2.7. Arduino Nano : 32
III.2.8. Module radio NRF24l01 2.4GHz : 33
III.2.9. Les joysticks : 34
III.2.10. La carcasse du quadrotor et du transmetteur RF: 34
III.3. Réalisation du transmetteur RF :
36
III.3.1. Schéma électronique : 36
III.3.2. Algorithme du transmetteur RF : 38
III.4. Récepteur RF 2.4 GHz : 40
III.4.1. Circuit et schéma électronique : 40
III.4.2. Algorithme du récepteur RF 2.4GHz : 41
III.4.3. Test des signaux de sortie du récepteur RF :
43
Sommaire
III.5.2. Unité de mesure de l'inertie gyroscopique
MPU-6050 : 48
III.5.3. Le contrôleur PID : 53
III.5.4. Contrôle des ESC : 58
III.6. Conclusion : 63
Chapitre IV : Tests et résultats
64
IV.1. Introduction : 64
IV.2. Test des signaux du récepteur RF :
64
IV.3. Test des données angulaires du Gyroscope :
67
IV.4. Identification des gains PID : 67
IV.5. Test de vol en zone ouverte: 69
IV.6. Conclusion : 70
Conclusion générale 71
Références
Bibliographiques
Annexe
Liste des figures
Figure 1.1 : le General Atomics MQ-9.
5
Figure 1.2 : RQ-170 Sentinel. 5
Figure 1.3 : Le drone Tactique RQ-7 Shadow.
6
Figure 1.4 : Le drone solaire Facebook «
Aquila ». 7
Figure 1.5 : Le drone miniature (nano drone UAV).
8
Figure 1.6 : Robot chauve-souris volante «
BAT BOT B2 ». 8
Figure 1.7 : Les mouvements de bases du quadrotor.
10
Figure 1.8 : Illustration du mouvement vertical
(Throttle). 12
Figure 1.9 : Illustration du mouvement de roulis
(Roll). 12
Figure 1.10 : Illustration du mouvement de tangage
(Pitch). 13
Figure 1.11 : Illustration du mouvement de lacet
(Yaw). 13
Figure 1.12 : Illustration du mouvement de
translation horizontale. 14
Figure 3.1 : la carte Arduino Uno.
28
Figure 3.2 : Unité de Mesure de l'Inertie
gyroscopique MPU-6050. 29
Figure 3.3 : Moteur Brushless EMAX XA2212 1400Kv
30
Figure 3.4 : Composantes interne du Moteur
Brushless . 30
Figure 3.5: variateur de vitesse « Hobbywing
OPTO ESC 20A ». 31
Figure 3.6 : Batterie de Lithium-Polymère
« LIPO » 11.1V 70C 2.2Ah. 31
Figure 3.7 : Hélices DJI 8045.
32
Figure 3.8 : Arduino Nano. 33
Figure 3.9 : NRF24l01 Radio module 2.4GHz.
33
Figure 3.10 : Joystick de haute qualité
..34
Figure 3.11 : Commandes de vol du drone ..
..34
Figure 3.12 : Les carcasses construites avec
logiciel SOLID WORKS en 3D. 35
Figure 3.13 : Circuit imprimé du plat
inferieur réalisé avec logiciel Eagle CAD soft.
35
Liste des figures
Figure 3.14 : Schéma électronique du
transmetteur RF 2.4 GHz. 36
Figure 3.15 : Schéma du circuit
imprimé du transmetteur RF 2.4 GHz. 37
Figure 3.16 : Transmetteur RF 2.4 GHz durant la
réalisation. 37
Figure 3.17 : Valeurs analogiques affichées
sur le moniteur série de l'Arduino IDE. 38
Figure 3.18 : Schéma électronique du
récepteur RF 2.4 GHz 40
Figure 3.19 : Schéma du circuit
imprimé du récepteur RF 2.4 GHz 41
Figure 3.20 : Valeurs correspondantes aux signaux
PWM afficher sur le moniteur série 43
Figure 3.21 : Schéma électronique du
contrôleur de vol du quadrotor. 44
Figure 3.22 : Schéma électronique
global du quadrotor. 44
Figure 3.23 : Pulsations PWM de fréquence
50 Hz pour deux canaux du récepteur RF. 45
Figure 3.24 : Diagramme des broches de
l'ATmega328p. 46
Figure 3.25 : Les mouvements de base.
48
Figure 3.27 : Signal de sortie du Gyro dans
l'état stationnaire pour l'axe de mouvement Yaw 53
Figure 3.28 : Schéma de la boucle de
contrôleur PID. 53
Figure 3.29 : Schéma montre le principe du
PID utilisé dans ce contrôleur de vol. 54
Figure 3.30 : Algorithme utilisé dans le
sous-programme PID du contrôleur de vol pour un axe 56
Figure 3.31 : Disposition des ESCs et direction de
rotation du quadrotor 59
Figure 3.32 : Algorithme du PID conduit le
quadrotor de revenir À l'état voulu 60
Figure 3.33 : Retour à l'état de
consigne désiré par le pilote 0°. 60
Figure 3.34 : Simulation des impulsions PWM de
fréquence 250 Hz à envoyer pour deux ESCs 61
Figure 4.1 : Image du quadrotor
réalisé. 64
Figure 4.2 : Connexion du récepteur RF
à l'oscilloscope digital. 65
Figure 4.3 : Signal PWM 50Hz de la commande
Throttle. 65
Figure 4.4 : Largeur d'impulsion 1ms.
66
Figure 4.5 : Largeur d'impulsion 2ms.
66
Figure 4.6 : vérification des angles de
Gyro sur l'Arduino IDE. 67
Figure 4.7 : Réglage des paramètres
PID. 68
Figure 4.8 : Test de vol dans un espace ouvert.
69
1
Introduction générale
Introduction générale
Ces dix dernières années, les avancées
technologiques et les nombreuses applications potentielles ont suscité
un intérêt croissant pour la robotique aérienne. La
problématique sur la programmation et le contrôl de vol des
véhicules aériens sans pilote ou les drones est
d'actualité. Les drones ont des applications commerciales
évidentes dans l'inspection d'ouvrages d'art comme les
ponts, les barrages ou les lignes hautes tensions, l'exploration
d'environnements dangereux comme des forêts en feu ou des zones
radioactives, les missions militaires de reconnaissance et d'autres divers
applications. La recherche dans le domaine des drones est essentiellement
pluridisciplinaire, en effet elle fait intervenir des domaines très
variés tels que l'aérodynamique, le traitement du signal et de
l'image, la commande automatique, la télécomunication, les
matériaux composites, l'informatique temps réel... etc.
Techniquement les drones n'ont pas les mêmes
capacités. Tout d'abord, ils peuvent avoir toute sorte de taille qui
peut aller de celle d'un avion de ligne à celle d'une
mouche. il y a celle qui pèsent
quelques grammes volent des centènes de mèttres à des
altitudes basses et avec des durés de vole de quelque minutes et
d'autres qui peuvent atteindres des tonnes, volent des centaines de
kilomètres à des altitudes très élevés. Dans
ce mémoire, nous nous intéressons en particulier aux robot volant
de type véhicules aériens miniatures et plus
particulièrement à un quadrotor (micro hélicoptère
à quatre hélices). Les quadrotors ont la capacité
d'effectuer un vol stationnaire, ils sont parmi les plus complexes des objets
volants, La difficulté dans le pilotage de ces types des
véhicules est d'assurer une bonne performance de suivi de la trajectoire
voulue tout en garantissant une résistance aux perturbations
aérodynamiques, parce que leur dynamique de vol est
intrinsèquement non linéaire.
L'objectif de ce projet traite alors la réalisation
d'un drone de type quadrotor piloté via une radiocommande, la conception
du contrôleur de vol du drone se fait en utilisant des composants
électroniques peu coûteux comme l'Arduino Uno et un module 3-axes
gyroscope MPU6050. Le bon fonctionnement de ce système nécessite
la réalisation d'une unité de commande émetteur /
récepteur radio fréquence, basé d'un Arduino Nano et un
module radio (NRF24L01) à 2.4 GHz pour servir à transmettre les
différentes commandes au contrôleur de vol, nous voulons donc
construire le Transmetteur Radio Fréquence et aussi bien le
contrôleur de vol du quadrotor en se basant beaucoup plus sur la
programmation des Arduino.
2
Introduction générale
Dans ce projet, le contrôleur de vol du quadrotor
utilise le gyroscope pour extraire les données de mouvements du drone
dans l'espace, puis les traités par l'Arduino Uno afin de
contrôler les angles d'inclinaison du quadrotor. Le programme sur lequel
j'ai travaillé utilise trois contrôleurs PID pour les trois axes
de mouvements essentiels (PITCH), (ROLL) et (YAW). Les consignes pour le
contrôleur PID sont les signaux de l'émetteur / récepteur
et les variables de sortie du gyroscope. La sortie du contrôleur PID est
utilisée pour contrôler la vitesse des moteurs brushless du
quadrotor et pour assurer l'équilibre. Après avoir
étudié des sous-programmes sur le Gyro MPU6050 et essayer de
comprendre comment lire ces données angulaires à partir des
registres de sortie, j'ai trouvé qu'il devait y avoir un moyen
très simple de créer une IMU pour un quadrotor. L'astuce est
juste d'examiner les données du gyroscope et puis j'ai essayé
plusieurs façons d'obtenir le bon algorithme en se
référant à l'open source. Mon mémoire est
structuré comme suit :
Chapitre 1 : généralité sur les drones.
Chapitre 2 : modélisation d'un drone quadrotor.
Chapitre 3 : conception et mise en oeuvre du fonctionnement.
Chapitre 4 : teste et résultats.
Chapitre 1
généralité sur les drones
Chapitre I Généralité sur les
drones
3
Chapitre I : Généralité sur les
drones
I.1. Introduction aux drones (U.A.V.) :
Plusieurs termes sont utilisés pour les
véhicules aériens sans pilote, qui se réfèrent
généralement au même concept. Un véhicule
aérien sans pilote U.A.V. (UNMANNED AIRCRAFT VEHICLE) ou R.P.A.S.
(Remotely Piloted Air System), communément connu sous le nom de drone,
C'est un avion qui ne porte pas d'opérateur humain à bord. Les
UAV sont des composantes d'un système d'aéronef sans pilote
U.A.S. (Unmanned Aircraft System); Qui comprennent un UAV, un contrôleur
terrestre et un système de communication entre les deux. Les drones
utilisent des forces aérodynamiques pour fournir un ascenseur de
véhicule, ils peuvent voler de façon autonome et être
piloté à distance, ils peuvent être
récupérables grâce à un système de navigation
programmable et effectuer des vols dans des différents environnements,
ils sont capables aussi de porter un camera de liaison de données,
permettant la transmission direct des vidéos. Le vol des drones UAV peut
se fonctionner avec de différents degrés d'autonomie: soit sous
contrôle à distance par un opérateur humain, soit par
ordinateur embarqué de manière autonome.
Par rapport aux avions équipés, les drones UAV
étaient à l'origine utilisés pour des missions trop
dangereuses pour les humains. Bien qu'ils proviennent principalement
d'applications militaires, leur utilisation s'étend rapidement aux
applications commerciales, scientifiques, récréatives, agricoles
et autres, telles que la police et la surveillance, la livraison de produits,
la photographie aérienne et d'autres diverses applications. Les drones
civils sont maintenant beaucoup plus nombreux que les drones militaires, avec
des dépenses de plus d'un million de vends pendant ces dernières
années.
I.2. L'historique des drones :
Les innovations de l'UAV ont commencé au début
des années 1900 et se sont initialement concentrées sur la mise
en place d'objectifs de formation pour former du personnel militaire. Le
développement de l'UAV s'est poursuivi pendant la Première Guerre
mondiale, lorsque Dayton-Wright Compagnie d'avion a inventé une torpille
aérienne sans pilote qui exploserait à un moment
préétabli. En 1920 en France, à la suite de la
première guerre mondiale George Clémenceau Président de la
Commission sénatoriale de l'Armée, lance un projet «
d'avions sans pilote » : le capitaine Max Boucher met au point un
système de pilotage automatique qui fait voler sur plus de cent
kilomètres un avion Voisin BN3. Ainsi, dans les années 1920, des
avions sans pilote radiocommandés voient le jour, avec les tentatives de
torpilles aériennes télécommandées par des ondes de
télégraphie sans fil. Le premier drone français stricto
sensu a été conçu, réalisé et
expérimenté dès 1923 à Etampes par
l'ingénieur Maurice Percheron et le capitaine Max Boucher. Toutefois,
l'armée française n'y voyait
Chapitre I Généralité sur les
drones
4
pas encore d'intérêt militaire. Le drone a
été développé de façon confidentielle par
les Etats-Unis comme un moyen de supériorité stratégique
et de rupture de capacité devant permettre la surveillance et
l'intervention militaire chez l'ennemi sans encourir les risques humains que
l'opinion ne supportait plus. En outre, il est utilisé pour larguer des
tracts dans le cadre de la guerre psychologique. L'Allemagne nazie a produit et
utilisé divers avions UAV pendant la guerre. Les moteurs à
réaction sont entrés en service après la Seconde Guerre
mondiale dans des véhicules tels que le GAF australien Jindivik et
Teledyne Ryan Firebee de 1951, alors que des entreprises comme Beechcraft ont
offert leur modèle 1001 pour la marine américaine en 1955.
Néanmoins, ce ne sont que des avions télécommandés
Jusqu'à la guerre du Vietnam. Les drones sont engagés pour la
première fois pendant la guerre du Viet Nam, puis lors de la guerre du
Kippour. Ils font désormais partie des moyens tactiques et
stratégiques du champ de bataille. L'absence de pilote permet
d'opérer à l'intérieur des lignes ennemies pour des
missions à risque, sans crainte de pertes humaines. Après cette
introduction historique nous allons à présent citer quelque type
des drones actuels.
I.3. Les différentes catégories des
drones :
Tous les drones n'ont pas les mêmes capacités.
Selon les besoins, ils peuvent avoir toute sorte de taille qui peut aller de
celle d'un avion de ligne à celle d'une mouche. La classification des
drones dépend de plusieurs critères tels que leurs longueurs,
leurs auteurs et leurs durées de vol. Ainsi que leurs poids changent
également. On distingue donc plusieurs classes de drones [9-10] :
I.3.1. Les drones militaires de longue endurance:
Le drone militaire est utilisé pour des missions de
reconnaissance, généralement à hauts risques pour les
soldats. Il est très en vogue chez les grandes puissances militaires
comme les Etats-Unis, la France et l'Angleterre. En effet actuellement des
drones patrouillent au moyen orient pour démanteler des réseaux
de terroristes. Avec des durées de vol comprises entre 12 et 48 heures,
on entre ici dans la catégorie des «grands» drones, dont la
taille est essentiellement dictée par une charge utile lourde et une
quantité élevée de carburant, nécessaire à
la mission. Cette catégorie se divise elle-même en deux parties,
en fonction de l'altitude de vol des machines : comme pour les avions, plus on
vole haut, plus on va vite et plus on parcourt de la distance. On distingue
ainsi les drones dits «MALE» (Moyenne Altitude Longue Endurance) des
drones «HALE» (Haute Altitude Longue Endurance).
· Les drones MALE « le General Atomics MQ-9
» :
Ce type de drone de combat Figure 1.1 peut
atteindre une vitesse de 480km/h, il peut être commandé
jusqu'à 1850 kilomètres par ses deux contrôleurs au sol ou
par liaison satellite. Il pèse un peu plus de 2 tonnes et peut atteindre
15 kilomètres d'altitudes avec une autonomie de vol de 30 heures. Aussi
il peut transporter six missiles et deux bombes, en temps de guerre ce type de
drone est
Chapitre I Généralité sur les
drones
5
utilisé pour l'espionnage mais peut également
servir comme lance-missiles. Un modèle non armé mais
bourré de capteurs et de caméras est également
utilisé par la Nasa et destiné à des recherches
scientifiques.

Figure 1.1 : le General Atomics MQ-9.
Les Américains ont d'emblée conçu des
systèmes MALE à la dimension de leurs théâtres
d'opérations en vue, non seulement de missions de reconnaissance, mais
aussi de désignation et de destruction d'objectifs au sol.
· Les drones HALE « RQ-170 Sentinel »
:
Le RQ-170 Sentinel Figure 1.2, est un
véhicule aérien sans pilote de haute altitude et de longue
endurance. C'est un drone furtif développé par Lockheed Martin et
exploité par la Force aérienne des États-Unis (USAF), on
atteint dans cette catégorie les dimensions d'un avion civil (Airbus
A320 par exemple) pour des autonomies de 10 000 kilomètres et plus
parcourues en volant largement au-dessus des trafics aériens courants,
La masse au décollage des drones HALE peut largement dépasser les
10 tonnes, dont quelque 10% pour la charge utile.

Figure 1.2 : RQ-170 Sentinel.
Environ 90% de l'avion est composé de matériaux
composites pour diminuer son poids total. Le RQ-170 peut offrir à ses
opérateurs des données de renseignement en temps réel en
exécutant des
Chapitre I Généralité sur les
drones
6
opérations de surveillance sur une vaste zone. Ce drone
peut capturer des images en temps réel puis les transférés
à une station de contrôle au sol à travers des lignes de
communication. Le RQ-170 a été déployé aux zones
hostiles pour des missions d'observation et de renseignements et pour
l'exploitation de la liberté durable, les capacités de ces drones
HALE sont à rapprocher et à comparer à celles des avions
pilotés du type de l'avion espion U2 (Fantôme) ou des avions de
renseignement électronique Signet, ainsi qu'à celles des
satellites d'observation ou d'alerte.
I.3.2. Les drones tactiques (Tactical Unmanned Air
Vehicle) :
Les drones tactiques Figure 1.3 sont des
drones militaires capables de s'envoler et d'atterrir sur courte distance
propulsé par un moteur bicylindre. Ils sont propulsés pour le
décollage par une catapulte pneumatique.

Figure 1.3 : Le drone Tactique RQ-7
Shadow.
L'atterrissage se fait à l'aide d'un parachute et de
coussins gonflables de sécurité placés sous les ailes. Ils
peuvent volés 5 à 8 heures et à des vitesses environ 175
km/h et volant à une altitude de 3 à 5 kilomètres, pour un
rayon d'action de 30 à 500 kilomètres. On distingue plusieurs
catégories des drones tactiques tels que l'AEROSTAR "AERONAUTICS DEFENSE
SYSTEMS", RQ-7 Shadow, Sperwer, Hermes, Watchkeepere...etc. Ce types de drones
comportent un ensemble de caméras gyrostabilisées et thermiques
qui permettent la prise d'images aériennes en lumière visible et
en infrarouge, il sert à la reconnaissance, la surveillance,
l'acquisition de cibles et l'évaluation des dommages de combats.
Chapitre I Généralité sur les
drones
7
I.3.3. Le drone solaire « Aquila» :
En juillet 2016, Facebook dévoilait son prototype de
drone solaire destiné à diffuser l'Internet haut débit
dans des zones non desservies ou disposant d'un accès de mauvaise
qualité, le réseau social vient d'annoncer avoir accompli avec
succès le premier vol d'essai d'un modèle à taille
réelle.

Figure 1.4 : Le drone solaire Facebook « Aquila
».
Baptisé Aquila (nom latin signifiant « aigle
») Figure 1.4, l'engin se présente le drone avec
une aile de 42 mètres d'envergure, plus grande que celle d'un Airbus
A320 et pour un poids de 1468 kg. Ce drone alimenté par des cellules
photovoltaïques est censé pouvoir voler durant 90 jours à
des altitudes comprises entre 18 à 27 kilomètres en diffusant un
accès Internet au sol dans un rayon d'un peu moins de 100
kilomètres.
Facebook indique que le drone, qui volait à une
vitesse d'environ 40 km/h, dissipait un peu moins de 2000 watts. Une puissance
qui, selon l'équipe en charge du projet Aquila, valide ses simulations
aérodynamiques et ses choix techniques pour le système de
propulsion. Aquila devrait servir à fournir une connexion internet dans
les zones reculées du monde, les ingénieurs de Facebook
espèrent faire voler ce type d'avion pendant plusieurs mois sans aucun
ravitaillement, grâce à une très faible consommation
d'énergie, l'équivalent de trois sèche-cheveux.
I.3.4. Les drones miniatures :
La course à la miniaturisation n'a de cesse
d'augmenter, la catégorie des drones miniatures recouvre globalement
tous les drones dont l'envergure est inférieure à 50
centimètres, on parle dans ce cas des mini-drones.

Chapitre I Généralité sur les
drones
Figure 1.5 : Le drone miniature (nano drone
UAV).
Ils sont généralement peu autonomes, mais qui
jouent souvent le rôle de jumelles déportées, par exemple
pour observer au-dessus d'un obstacle ou dans une zone à risque. Les
micro-drones dont les dimensions sont inférieurs à 15 cm,
pèsent environ 50 grammes avec une vitesse de croisière de
l'ordre de 50 Km/h et un rayon d'action d'une dizaine de kilomètres. Ces
micro-drones sont dédiés à la transmission d'images, de
jour comme de nuit. Les missions envisagées sont par exemples
l'évaluation de dommages ou l'observation d'une cible fixe...etc.
I.3.5. Le robot animal volant « BAT BOT B2 »
:
En 2016, une équipe nord-américaine a
développé un drone qui imite avec précision le vol de la
chauve-souris.
Une avance qui devrait aider à étudier
étroitement que possible le formidable système
musculo-squelettique de cet animal, mais aussi à concevoir des robots
volants plus sûrs et efficaces. Reproduire la cinématique des
ailes d'un oiseau en robotique est un défi technique complexe. Mais ils
ont simplement présenté la dernière version de leur drone
appelé « Bat Bot B2 », Figure 1.6.
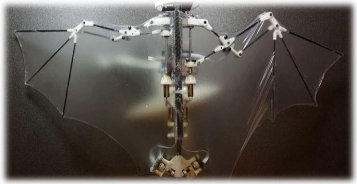
Figure 1.6 : Robot chauve-souris volante « BAT
BOT B2 ».
8
Chapitre I Généralité sur les
drones
9
Il pèse seulement 93 grammes pour 47 centimètres
d'envergure, « Le Bat Bot » est contrôlé par des moteurs
miniatures logés dans la colonne vertébrale, les ailes sont
recouvertes d'une membrane en silicone de 56 microns d'épaisseur
spécialement développée et qui reproduit
l'élasticité naturelle des ailes des chauves-souris.
Les chercheurs disent avoir identifié cinq mouvements
dominants dans l'aile battant de la chauve-souris qu'ils ont mis en oeuvre pour
reproduire environ 57% de la cinématique originale. Au cours des essais,
le Bat Bot B2 a volé à environ trente mètres, fait des
virages inclinés et plonge. Tant de mouvements supposés
reproduire en partie les techniques de chasse d'une chauve-souris.
Le but principal de ce drone est de servir à
étudier plus précisément le vol de la chauve-souris. Les
concepteurs du « Bat Bot » ajoutent que cette configuration offrirait
également une meilleure sécurité que les drones quadri
rotors dans des environnements où il y a risque de collision avec des
personnes ou des objets. Le développement du « Bat Bot »
continuera, dans le but notamment de reproduire la capacité des
chauves-souris à se percher verticalement vers le bas.
I.4. Domaines d'application des quadrotors :
L'utilisation des quadrotors n'a cessé de progresser
ces dernières années, notamment dans les applications de loisir.
Mais dans les domaines professionnels cette progression est encore plus
flagrante [12]. Avec ses 4 moteurs, le drone quadrotor apporte des
possibilités d'embarquement de caméras, appareils photos et
autres capteurs pour réaliser des missions aériennes
d'acquisition de données, là où des moyens conventionnels
sont trop onéreux ou trop compliqués voire impossibles à
mettre en oeuvre.
Par ses capacités à rester en vol stationnaire
ou à évoluer selon des trajectoires complexes, le drone quadrotor
devient un outil privilégié utilisé dans plusieurs
domaines tel que:
I.4.1. Domaine de sécurité :
? Les quadrotors sont utilisés par Les services de
secours (police, sapeurs-pompiers et gendarmerie) pour l'évaluation des
dégâts en cas de catastrophe naturelle afin de prendre des
informations stratégiques sur des interventions en hauteur et
délicates (exemples: victimes d'avalanches, victimes d'inondations et de
tremblement de terre, repérage des feux de forêts, l'exploration
des zones radioactives, les volcans etc...)
? Inspection des ouvrages d'art tels les ponts, les viaducs,
les barrages.
? La surveillance maritime (voies maritimes, trafic de
drogue, détection des pollutions par hydrocarbures, la surveillance
urbaine, des manifestations, ainsi que les frontières).
? missions militaires de reconnaissance et support de
combat.
Chapitre I Généralité sur les
drones
10
I.4.2. Domaine civil :
? Dans le domaine civil, les quadri-rotors sont conçue
pour explorer des situations difficiles d'accès, comme des montagnes,
des canyons. Ils serviraient à faire prises de vue aériennes
inédites et des vidéos pour des chaînes télé
comme (des reportages sur des lieux isolés de la terre, des
documentaires, films, etc..).
? Inspection des ouvrages d'art tels les ponts, les viaducs,
les barrages.
? Etudes scientifiques (topographie et cartographie,
Étude de l'atmosphère, des sols (géologie) et des
océans).
? Transport et livraisons des produits légères
sur de courtes distances comme (Les colis postaux, boites de pizza, etc...).
I.5. Description général du quadrotor
:
Un quadrotor est un robot mobile aérien à
quatre rotors définit par six degrés de liberté dans
l'espace (3 axes X, Y, Z) Figure 17. [1-2]. Ces 4 rotors sont
généralement placés aux extrémités d'une
croix, et l'électronique de contrôle est habituellement
placée au centre de la croix. Afin d'éviter à l'appareil
de tourner sur lui-même sur son axe de lacet, il est nécessaire
que deux hélices tournent dans un sens, et les deux autres dans l'autre
sens. Pour pouvoir diriger l'appareil, il frauder que chaque couple
d'hélice tournant dans le même sens soit placé aux
extrémités opposées d'une branche de la croix. Le
fonctionnement d'un quadrotor est assez particulier.
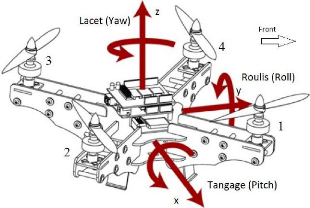
Figure 1.7 : Les mouvements de bases du
quadrotor.
En faisant varier astucieusement la puissance des moteurs, il
est possible de le faire monter/descendre, de l'incliner à gauche/droite
(roulis) ou en avant/arrière (tangage) ou encore de le faire pivoter sur
lui-même (lacet) [3], le quadrotor a six degrés de
libertés, trois mouvements de rotation et trois mouvements de
translation, ces six degrés doivent être commandés à
l'aide de quatre déclencheurs
Chapitre I Généralité sur les
drones
11
Chapitre I Généralité sur les
drones
12
seulement; Donc c'est un système sous actionné
(le nombre des entrées inférieure au nombre des sorties).
I.6. Les mouvements du quadrotor :
Dans les hélicoptères classiques, quand le
rotor principal tourne, il produit un couple réactif qui inciterait le
corps de l'hélicoptère à tourner dans la direction
opposée si ce couple n'est pas contrarié. Ceci est habituellement
fait en ajoutant un rotor de queue qui produit une poussée dans une
direction latérale. Cependant, ce rotor avec son alimentation
électrique associée ne fait aucune contribution à la
poussée. Par contre, en cas de quadrotor, le rotor droit et le rotor
gauche tournent dans le sens des aiguilles d'une montre et dans la direction
opposée les rotors avant et arrière, ceci neutralise
effectivement le couple réactif non désiré et permet au
véhicule de planer sans tourner hors de la commande. D'ailleurs,
différemment aux hélicoptères classiques, toute
l'énergie dépensée pour contrecarrer le mouvement de
rotation contribue à la force de poussée [4-11].
Les mouvements de base de quadrotor sont
réalisés en variant la vitesse de chaque rotor changeant de ce
fait la poussée produite. Le quadrotor incline vers la direction du
rotor plus lent, qui tient compte alors de la translation le long de cet axe.
Par conséquent, comme à un hélicoptère classique,
les mouvements sont couplés, signifiant que le quadrotor ne peut pas
réaliser la translation sans roulement ou tangage, ce qui signifie qu'un
changement de la vitesse d'un rotor se traduit dans un mouvement en au moins
trois degrés de liberté. Par exemple, augmentant la vitesse de
propulseur gauche aura comme conséquence un mouvement de roulis (le
quadrotor incline vers le rotor plus lent, vers la droite), un mouvement de
lacet (l'équilibre entres les rotors qui tourne dans le sens des
aiguilles d'une montre et les rotors qui tourne dans le sens inverse est
perturbé ayant pour résultat un mouvement de rotation
horizontal), et une translation (le mouvement de roulis incline l'armature et
avec lui, l'orientation de la force de poussée). Cet accouplement est la
raison pour laquelle nous pouvons commander les six degrés de
liberté de quadrotor avec seulement quatre commandes (le couple
appliqué par les moteurs sur chaque propulseur).
Le quadrotor a cinq mouvements principaux :
Mouvement vertical (Throttle), Mouvement de
roulis (Roll), Mouvement de tangage (Pitch),
Mouvement de lacet (Yaw) et Translations horizontales.
I.6.1. Le mouvement vertical (Throttle) :
Afin de planer, toute la force de portance devrait seulement
être le long de l'axe z avec une grandeur exactement opposée
à la force de pesanteur. D'ailleurs, la force de portance crée
par chaque rotor doit être égale pour empêcher le
véhicule de renverser plus. Par conséquent, la poussée
produite par chaque rotor doit être identique.
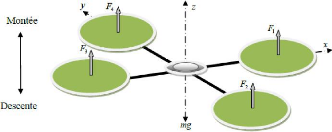
Figure 1.8 : Illustration du mouvement vertical
(Throttle).
Le mouvement ascendant et descendant est obtenu par la
variation de la vitesse de rotation des moteurs (par conséquence la
poussée produite), si la force de portance est supérieure au
poids du quadrotor le mouvement est ascendant, et si la force de portance est
inférieure au poids du quadrotor le mouvement est descendant.
I.6.2. Le mouvement de roulis (Roll) :
La Figure 1.9 montre bien comment un
mouvement de roulis est obtenu. Dans ce cas, on applique un couple autour de
l'axe x, c'est-à-dire en appliquant une différence de
poussée entre les rotors (1, 2) et les rotors (3, 4). Ce mouvement
(rotation autour de l'axe x) est couplé avec un mouvement de translation
selon l'axe y.

Figure 1.9 : Illustration du mouvement de roulis
(Roll).
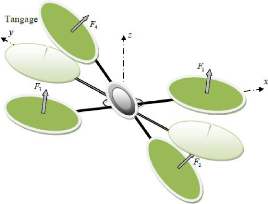
I.6.3. Le mouvement de tangage (Pitch) :
La Figure 1.10 montre comment un mouvement
de tangage est obtenu. Dans ce cas, on applique un couple autour de l'axe y,
c'est-à-dire en appliquant une différence de poussée entre
le rotor (1, 4) et les rotors (2, 3). Ce mouvement (rotation autour de l'axe y)
est couplé avec un mouvement de translation selon l'axe x.
Chapitre I Généralité sur les
drones
13
Figure 1.10 : Illustration du mouvement de tangage
(Pitch).
I.6.4. Le mouvement de lacet (Yaw) :
La Figure 1.11 montre comment le mouvement
de lacet est obtenu. Dans ce cas, nous voulons appliquer un couple autour de
l'axe z, qui est fait en appliquant une différence de vitesse
entre les rotors (1,3) et (2,4). Ce mouvement n'est pas un résultat
direct de la poussée produit par les propulseurs mais par les couples
réactifs produits par la rotation des rotors.
La direction de la force de poussée ne décale
pas pendant le mouvement, mais l'augmentation de la force de portance dans une
paire de rotors doit être égale à la diminution des autres
paires pour s'assurer que toute la force de poussée demeure la
même.

Figure 1.11 : Illustration du mouvement de lacet
(Yaw).
Chapitre I Généralité sur les
drones
14
I.6.5. Le mouvement de translation horizontale :
La Figure 1.12 montre comment la translation
horizontale est réalisée. Dans ce cas, nous voulons appliquer une
force le long de x ou de y qui est fait en inclinant le corps
(par le tangage ou le roulement) et en augmentant toute la poussée
produite pour garder l'importance du composant de z de la
poussée égale à la force de pesanteur.
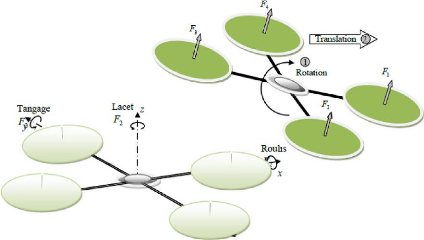
Figure 1.12 : Illustration du mouvement de translation
horizontale.
Chapitre I Généralité sur les
drones
15
I.7. Conclusion :
Ce chapitre permet au lecteur d'avoir des concepts
préliminaires sur les différentes catégories des robots
volants plus particulièrement les quadrotors et leur principe de
fonctionnement. Dans le chapitre suivant nous donnons plus de détaille
sur les paramètres dynamiques affectant l'orientation du quadrotor, les
équations mathématiques et la modélisation de
Newton-Euler.
Chapitre 2
Modélisation dynamique d'un quadrotor
Chapitre II Modélisation dynamique d'un
quadrotor
16
Chapitre II : Modélisation dynamique d'un
quadrotor
II.1. Introduction :
Afin de concevoir un contrôleur de vol, on doit d'abord
comprendre profondément la dynamique de l'avion, par conséquent
son modèle dynamique. Cette compréhension est nécessaire
non simplement pour la conception du contrôleur, mais aussi pour
s'assurer que le comportement de véhicule est plus proche que possible
de la réalité lorsque la commande est appliquée.
Le quadrotor est classé dans la catégorie des
systèmes volants les plus complexes vu le nombre d'effets physiques qui
affectent sa dynamique à savoir les effets aérodynamiques, la
gravité, les effets gyroscopiques, les frottements et le moment
d'inertie. Cette complexité résulte essentiellement du fait que
l'expression de ces effets diffère pour chaque mode de vol. En effet les
modèles dynamiques du quadrotor proposés changent en fonction des
taches planifiées et en fonction des milieux de navigation
définis à priori par l'opérateur.
II.2. Modèle dynamique du quadrotor :
La modélisation des robots volant est une tâche
délicate puisque la dynamique du système est fortement non
linéaire et pleinement couplée. Afin de pouvoir comprendre au
mieux le modèle dynamique développé ci-dessous,
voilà les différentes hypothèses de travail :
· La structure du quadrotor est supposée rigide
et symétrique, ce qui induit que la matrice d'inertie sera
supposée diagonale,
· Les hélices sont supposées rigides pour
pouvoir négliger l'effet de leur déformation lors de la
rotation.
· Le centre de masse et l'origine du repère
lié à la structure coïncident.
· Les forces de portance et de traînée sont
proportionnelles aux carrés de la vitesse de rotation des rotors, ce qui
est une approximation très proche du comportement
aérodynamique.
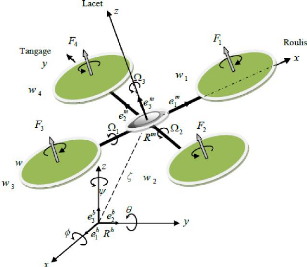
Pour évaluer le modèle mathématique du
quadrotor on utilise deux repères, un repère fixe lié
à la terre Rb et un autre mobile Rm. Le passage entre
le repère mobile et le repère fixe est donné par une
matrice dite matrice de transformation T qui contient l'orientation et la
position de repère mobile par rapport au repère fixe. On choisit
la convention d'axes suivants :
Chapitre II Modélisation dynamique d'un
quadrotor
17
Figure 2.1 : Géométrie du quadrotor.

(1)
Avec R la matrice de rotation (décrit l'orientation de
l'objet mobile), æ = [x Y Z]T est le vecteur de
position. Pour déterminer les éléments de la matrice de
rotation R, on utilise les angles d'Euler.
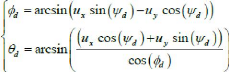
II.2.1. Angle d'Euler :
Au début le repère mobile est coïncide avec
le repère fixe, après le repère mobile fait un mouvement
de rotation autour de l'axe x d'un angle de roulis(- 2 <
ç < 2), suivi d'une rotation
Autour de l'axe y d'un angle de tangage(- 2 <
ç < 2), suivi d'une rotation autour de l'axe z
d'angle de lacet(-7r < i < 7r). Donc on a la
formule de la matrice de rotation R :
ci -si 0 ce 0 se 1 0 0
R = Rots (i )
× Roty(e) × Rot,
(ç) = ~si ci 0 ~× ~0 1 0
~× ~0 cç-sç ~ (II.2)
0 0 1
-se 0 ce 0 sç cç
R = ~ci ce sçseci - sci ????
cçseci + si sç si ce sçsesi + ci ce
cçsesi - cçci ~ (II.3)
-se sçce
cçce
Avec : c = cos et s = sin
Chapitre II Modélisation dynamique d'un
quadrotor
II.2.2. Vitesses angulaires :
Les vitesses de rotations Ù1,
Ù2,Ù3dans le repère
fixe sont exprimées en fonction des vitesses de rotations ?????,
?????, ????? dans le repère mobile, on a :
Ù = ~Ù10
0
Ù2~ =
~?????0~ +
????????????????(????)-1
~????? ~+
(????????????????(????)????????????????(????))-1
~????0~ Ù3 0 0
|
(II.4)
|
|
En effet, la rotation en roulis a lieu lorsque les
repères sont encore confondus. Puis, en ce qui concerne le tangage, le
vecteur représentant la rotation doit être exprimé dans le
repère fixe: il est donc multiplié par
????????????????(????)-1. De
même, le vecteur représentant la rotation en lacet doit être
exprimé dans le repère fixe qui a déjà subites deux
rotations. On arrive ainsi à:
Ù???? ????? 0 -????????????? ????? -
?????????????
Ù = ~ Ù???? ~ =
~ ?????????????
0 ~ + ~ ~ + ~
????????????????????? ~ = ~ ????????????? +
????????????????????? ~ (II.5)
Ù???? 0 -?????????????
????????????????????? ????????????????????? - ?????????????
1 0 -????????
Ù = 0 ???????? ???????????????? ~
× ~(id (II.6)
0 -???????? ????????????????
Quand le quadrotor fait des petites rotations, on peut faire les
approximations suivantes:
cö =cè =cø =1, et sö =
sè = sø = 0.
Donc la vitesse angulaire sera:
Ù = [????? ????? ?????]
(II.7)
II.2.3. Vitesses linéaires :
Les vitesses linéaires ????????????,
????????????, ???????????? dans le repère fixe
en fonction des vitesses linéaires ???????????? ,
???????????? , ???????????? dans le repère
mobile sont données par :
18
???? ????
(II.8)
???????? ????????
???? = ~????????????~ = ????
× ~????????????~

???? ????????

????????????
II.2.4. Effets physiques agissants sur le quadrotor :
II.2.4.1. Les forces :
Les forces agissant sur le système sont :
Le poids du quadrotor: il est donné par
P = mg, où : m est la masse totale et g la
gravité.
Chapitre II Modélisation dynamique d'un
quadrotor
19
Les forces de poussée: qui sont des
forces provoquées par la rotation des moteurs, elles sont
perpendiculaires sur le plan des hélices. Ces forces sont
proportionnelles au carrée de la vitesse de rotation des moteurs :
FL = bwL2 (II.9)
Avec i = 1: 4, et b est le coefficient de
portance, il dépend de la forme et le nombre des pales et la
densité de l'air.
Les forces de traînée : la force
de traînée est le couplage entre une force de pression et la force
de frottement visqueux, dans ce cas on a deux forces de traînée
agissant sur le système qu'elles sont :
· La traînée dans les hélices : elle
agisse sur les pales, elle est proportionnelle à la densité de
l'air, à la forme des pales et au carré de la vitesse de rotation
de l'hélice, elle est donnée par la relation suivante :
Th = dw2 (II.10)
Avec d est le coefficient de drag il dépend de
la fabrication de l'hélice.
· La traînée selon les axes (x, y,
z): elle est due au mouvement du corps du quadri-rotor
Ft = Kfty (II.11)
Avec : K ft le coefficient de
traînée de translation et V la vitesse
linéaire.
II.2.4.2. Les moments :
Il y a plusieurs moments agissants sur le quadrotor, ces moments
sont dus aux forces de poussée et de traînée et aux effets
gyroscopiques.
Moments dus aux forces de poussée :
· La rotation autour de l'axe x : elle est due au
moment crié par la différence entre les forces de portance des
rotors 2 et 4, ce moment est donné par la relation suivante :
Mx= l(F4 - F2) =
lb(w42 - w2 2) (II.12)
Avec l, est la longueur du bras entre le rotor et le
centre de gravité du quadrotor.
· La rotation autour de l'axe y : elle est due au moment
crié par la différence entre les forces de portance des rotors 1
et 3, ce moment est donné par la relation suivante :
My= l(F3 - F1) = lb(w32 -
w12) (II.13)
Moments dus aux forces de traînée
:
· La rotation autour de l'axe z : elle est due à un
couple réactif provoqué par les couples de traînée
dans chaque hélice, ce moment est donné par la relation suivante
:
Chapitre II Modélisation dynamique d'un
quadrotor
20
???????? = ????(????1 2 - ????2
2 + ????3 2 - ????42)
(II.14)
(II.15)
s Moment résultant des frottements
aérodynamiques, il est donné par :
???????? = ????????????Ù2
Avec ???????? ????: Le coefficient des frottements
aérodynamiques et ? est la vitesse angulaire.
II.2.4.3. Effet gyroscopique :
L'effet gyroscopique se définit comme la
difficulté de modifier la position ou l'orientation du plan de rotation
d'une masse tournante. L'effet gyroscopique est ainsi nommé en
référence au mode de fonctionnement du gyroscope, appareil de
contrôle de mouvement utilisé dans l'aviation (du grec Gyro qui
signifie rotation et scope, observer).
Dans notre cas il y a deux moments gyroscopiques, le premier
est le moment gyroscopique des hélices, l'autre est le moment
gyroscopique dû aux mouvements de quadrotor.
s Moment gyroscopique des hélices : il
est donné par la relation suivante :
????????h = ? 4 Ù ? ???????? [0
0 (-1)????+1
????????]???? (II.16)
1
Avec ???????? est l'inertie des rotors.
s Moment gyroscopique dû aux mouvements
de quadri-rotor : il est donné par la relation suivante :
???????????? = Ù ? ???? Ù
(II.17)
Avec J est l'inertie du système.
II.2.5. Développement du Modèle
mathématique selon Newton-Euler [5-6-7-8]:
En utilisant la formulation de Newton-Euler, les
équations sont écrites sous la forme suivante:
|
(II.18)
|
Avec æ : est le vecteur de position du
quadri-rotor
m : la masse totale du quadri-rotor
? : La vitesse angulaire exprimée dans
le repère fixe
R : La matrice de rotation
? : Le produit vectoriel
|
|
Chapitre II Modélisation dynamique d'un
quadrotor
???????? ????????, ???????? ????????, ???????? ????????: Les
coefficients des frottements aérodynamiques.
21
J : matrice d'inertie symétrique de dimension
(3x3), elle est donnée par :
???????? 0 0
???? = ~0 ???????? 0 ~ (II.19)
0 0 ????????
????(Ù) : est la matrice antisymétrique; pour un
vecteur de vélocité Ù = [????1 ????2 ????3] ???? , elle
est donnée par:
0 ?Ù3 Ù2
????(Ù) = ~Ù3 0 ?Ù1 ~ (II.20)
?Ù2
Ù1 0
???????? : est la force totale générée par
les quatre rotors, elle est donnée par :
????????= ????× [0 0 ? ????????
4 ????=1 ]???? (II.21)
???????? = ????????????2 (II.22)
???????? : La force de traînée selon les axes
(x, y, z), elle est donnée par :
-???????????????? 0 0
???????? = ~0 -???????????????? 0 ~ ????? (II.23)
0 0 -????????????????
????????????????, ????????????????, ???????????????? : Les
coefficients de traînée de translation, ???????? : Force de
gravité, elle est donnée par :
0
???????? = ~0 ~ (II.24)
-????????
???????? : Moment provoqué par les forces de
poussée et de traînée.
????(????4 - ????2)
???????? = ~????(????3 - ????1) ~ (II.25)
2
????(????12 - ????22
+ ????32 - ????4)
????????: Moment résultant des frottements
aérodynamiques, il est donnée par :

???????? ????????????? 2~????????
?????????????????????
???????? ???????? ?????2
=
2 (II.26)
Chapitre II Modélisation dynamique d'un
quadrotor
22
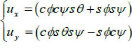
II.2.5.1. Equations de mouvement de translation :
On a:
·
???????? = ???????? + ???????? + ???????? (II.27)
On remplace chaque force par sa formule, on trouve :
????
|
????· ????????????????????????+
~ ????· ~ = ~ ???????????????????????? -
????· ????????????????
|
????????????????
???????????????? ~
|
4
? ????=1
|
????????
|
-
|
???????? ?????????????
~ ???????? ????????????? ~
???????? ???????????? ?
|
-
|
0
~ 0 ~
????????
|
(II.28)
|
|
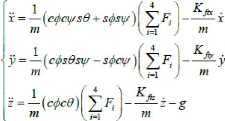
On obtient alors les équations différentielles qui
définissent le mouvement de translation :
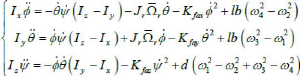
II.2.5.2. Equation de mouvement de rotation :
On a:
????Ù? = -????????h - ????????h - ???????? +
???????? (II.30)
On remplace chaque moment par la formule correspondant, on
trouve :
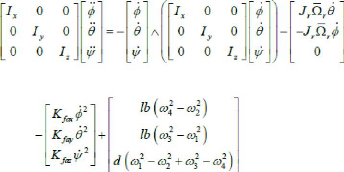
On obtient alors les équations différentielles
définissants le mouvement de rotation :
Chapitre II Modélisation dynamique d'un
quadrotor
23
Avec : fr
|
= W1 - W2 + W3 - W4
(II.33)
|
|
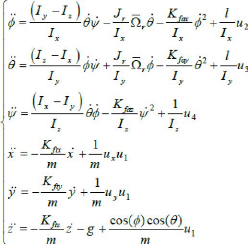
En conséquence, le modèle dynamique complet qui
régit le quadrotor est le suivant :
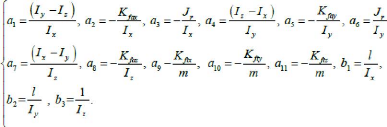
Avec :
Et :
A partir de (II.35), on trouve :
Chapitre II Modélisation dynamique d'un
quadrotor
24
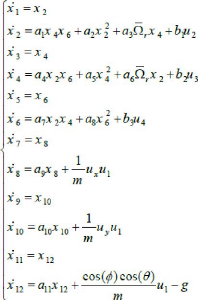
II.2.6. La représentation d'état du
système :
Pour un système physique il existe une multitude de
représentations d'état, dans notre cas on choisit le vecteur
d'état comme suit [ ] :

On obtient la représentation d'état suivante :
Avec :
Chapitre II Modélisation dynamique d'un
quadrotor
????~???? (II.43)
~?
????????
????
????????
???? =
25
II.7. La dynamique des rotors [1-2] :
Généralement les moteurs utilisés dans les
quadrotors sont des moteurs à courant alternatif.
La dynamique du rotor est donc approximée à celle
d'un moteur à courant alternatif, elle est donnée par les
équations différentielles suivantes :
Avec : ???????? est le couple d'entrée, et ???????? =
????????????2 est le couple résistant généré par le
rotor i.
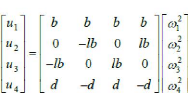
Pour atteindre les objectifs de la commande d'un quadrotor, une
boucle d'asservissement en vitesse est souvent nécessaire. D'abord, nous
avons besoin de déterminer les vitesses désirées
????????,????
correspondantes aux valeurs des commandes fournies par le
contrôleur, ces vitesses peuvent être calculées comme suit
:
????~???? = ????-1???? (II.40)
Avec: ????~???? = (????????12 , ????????22 , ????????32 ,
????????4
2 ), ???? = (????1,????2,????3,
????4)????, et ???? est une matrice non
singulière, elle est obtenu à partir de (II.36).
L'objectif est de synthétisé un contrôleur
pour que ???????? ? ????????,???? lorsque ???? ? 8 en utilisant les
couples???????? .
On définit l'erreur de vitesse :
????~???? = ???????? - ????????,???? (II.41)
Une loi de
commande est développée dans [1-2], elle est donnée par
:
???????? = ???????? + ?????????????????,???? - ????????????~????
(II.42)
Avec ????????, i ?{1, 2, 3,4}sont des gains positifs.
On remplace la loi de commande dans (II.39), on obtient :
Chapitre II Modélisation dynamique d'un
quadrotor
26
Cette relation représente la dynamique de l'erreur, elle
nous montre la convergence exponentielle de
toi vers toi
lorsquet - 00. Sa signifier la
convergence des commandes du quadrotor vers ces valeurs désirées,
ce qui assure la stabilité du quadrotor.
En réalité le quadrotor est commandé par
les tensions d'alimentation de ces quatre moteurs. Pour commander ces moteurs,
nous avons besoin d'obtenir la tension d'entrée de chaque moteur.
Supposant que l'inductance du moteur est petite, et considérant que les
moteurs utilisés sont identiques, nous pouvons obtenir la tension
d'entrée de chaque moteur comme suit :
(II.43)
????????
KmKg
Avec : Ra est la
résistance du moteur, Km est la
constant du couple de moteur, Kg est le
gain du réducteur.
Vi = Ti + KmKgtoi
Chapitre II Modélisation dynamique d'un
quadrotor
27
II.3. Conclusion :
Ce chapitre permet au lecteur de comprendre les bases
physiques utilisées pour déterminer les équations de la
cinétique et la dynamique des quadrotors, ainsi que les forces et les
moments agissantes. L'utilisation du formalisme de Newton-Euler nous a permet
d'établir le modèle dynamique du quad rotor. La complexité
du modèle, La non linéarité, et l'interaction entre les
états du système, peuvent se voir clairement. Les
résultats des formules précédentes sont utilisés
généralement pour établir un modèle
mathématique permettant de décrire avec précision le
comportement du système. Dans le prochain chapitre, je vais expliquer
brièvement le hardware et le software utilisé dans la
réalisation du quadrotor.
Chapitre 3
Conception et mise en oeuvre Lu
Fonctionnement
Chapitre III Conception et mise en oeuvre du
fonctionnement
Chapitre III : Conception et mise en oeuvre du
fonctionnement
III.1. Introduction :
Le but de ce chapitre est de donner une description globale
du principe de fonctionnement des différentes parties de notre
système, en expliquant le hardware que j'ai utilisé pour ce
projet et comment je me suis installé avec des outils et des instruments
électroniques de base pour réaliser le contrôleur de vol du
drone, le transmetteur RF et le récepteur. Je vais également
donner une explication détaillée sur la partie software
utilisé pour ce projet, passant au processus de construction
étape par étape.
III.2. Description du hardware utilisé :
Les quadrotors sont des systèmes complexes, qui
exigent des composants et une instrumentation varié qui doit être
à la fois de haute performance et de poids allégés. Ici on
va introduire les plus importants :
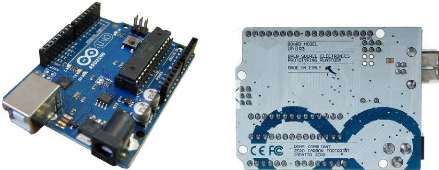
III.2.1. Arduino Uno :
Un Arduino Uno Figure 3.1, c'est le
composant le plus simple pour commencer avec, il me donne beaucoup de couvert
pour continuer à développer mon propre contrôleur de vol du
quadrotor car il s'agit d'un PCB à double face professionnelle avec des
faibles interférences et bruits, donc il convient bien pour le vol.
Alors je pourrais utiliser un Arduino pro mini pour cela, mais le
problème c'est que l'alimentation sur un pro mini est basée d'un
régulateur MIC5205, qui ne peut fournir qu'un 150mA avec un bon
refroidissement. Donc pour garder les choses sur le côté
sûr, j'ai utilisé un Arduino Uno pour la réalisation du
contrôleur de vol.
28
Figure 3.1 : la carte Arduino Uno.
Arduino Uno, est une carte de développement "Open-Source
Hardware" peu coûteuse, ce qui signifie que tout le monde est libre de
télécharger les fichiers de conception et de tourner sa propre
Chapitre III Conception et mise en oeuvre du
fonctionnement
29
Chapitre III Conception et mise en oeuvre du
fonctionnement
Chapitre III Conception et mise en oeuvre du
fonctionnement
version du conseil de développement populaire. Il est
basé sur un microcontrôleur ATmega en 8-bit et Il contient tout le
nécessaire pour supporter le microcontrôleur; Il suffit de le
connecter à un ordinateur avec un câble USB ou de l'alimenter avec
un adaptateur AC-DC ou une batterie pour le démarrer. Dans le cadre de
ce projet le traitement séquentiel des instructions de programme est
important, on utilise souvent les interruptions des pates d'entrés de
l'Arduino Uno pour lire les signaux de commande venant du récepteur
radio aussi en utilise les sorties PWM de l'Arduino Uno pour commander la
rotation des moteurs brushless via les ESC. Finalement l'utilisation du
protocole de communication I2C permet de lire les données provenant de
Gyro, de sorte que nous pouvons agir sur la stabilité du drone.
III.2.2. Gyroscope MPU-6050 :
Nous avons seulement besoin de corriger le mouvement
indésirable du quad rotor, le Gyro c'est le capteur idéal de
notre projet. J'ai choisi le MPU-6050 Figure 3.2, car il est
très facile à obtenir, il est également très bon
marché et il détient d'un accéléromètre et
un gyroscope à la fois, ceci est très pratique lors de la
programmation d'une IMU. La centrale inertielle ou l'IMU est un ensemble de
capteurs qui peut être installé au bord de n'importe quel corps
mobile pour lire les données des mouvements de ce corps. Ce type de puce
est en réalité ce qu'on appelle un micro système
électromécanique ou un MEMS pour abrégé, ceci est
rien d'autre que des capacités qui varient en fonction de
l'accélération et de la vitesse angulaire. Donc pour notre cas,
nous pourrons déterminer et traité les mouvements du quad rotor
dans l'espace. L'interface du module MPU-6050 avec Arduino se fait aux broches
(SCL et SDA) à l'intermédiaire d'une liaison I2C.
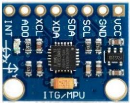
Figure 3.2 : Unité de Mesure de l'Inertie
gyroscopique MPU-6050.
Le mouvement angulaire sur le quadrotor est partout le
même. Donc, peu importe où se trouve le gyroscope. Mais c'est
toujours une bonne idée de monter le gyroscope au centre de
gravité du quad où les vibrations sont les plus faibles.
III.2.3. Les moteurs sans balais « Brushless »
:
Dans le cadre de ce projet, j'ai besoin des moteurs de petite
masse et à la fois de très haute vitesse avec un rapport
couple-masse élevée. Pour cela je suis obligé de
travaillé avec les moteurs sans balais ou "Brushless BLDC motor". Comme
le montre la Figure 3.3.
30
Les moteurs brushless sont en fait un type de moteur synchrone
à aimants permanents tourne avec un courant alternatif triphasé
AC. Ils présentent de nombreux avantages par rapport aux moteurs DC
classiques à savoir, leurs longues durées de fonctionnement et
leurs insensibilités aux parasites en plus leurs réponses
dynamiques élevées. Ce type de moteur, c'est ce qui fait tourner
et générer de la poussée pour permettre au drone de voler.
Dans le cas des multirotors, les moteurs génèrent une
poussée vers le haut qui maintient le drone comme un quadcopter volant.
Autrement dit, un moteur sans balai contient un ensemble
d'électroaimants (bobines) qui sont reliés ensemble dans des
paires spécifiques. Ces électroaimants sont connectés en
trois sections principales, de sorte que le moteur brushless comporte trois
fils sortants, Figure 3.4.

Figure 3.3 : Moteur Brushless EMAX XA2212 1400Kv. Figure
3.4 : Composantes interne du Moteur Brushless.
Le moteur sans balais se compose de deux sections principales
:
· Rotor : la partie qui tourne et a les aimants
montés sur un motif radial.
· Stator : la partie qui ne tourne pas, et dispose
d'électroaimants.
J'utilise pour ce projet quatre moteurs de la marque EMAX
XA2212 1400Kv, ces moteurs ont 27.9 mm de diamètre et 43.16 mm de
longueur, ils pèsent 51g et ils consomment une puissance de 197 Watts
avec un courant max de 16.4A. Le KV veut dire la vitesse de rotation du moteur
pour 1 volt. Il indique le nombre de tour/minute/volt du moteur à vide.
Dans notre cas, le circuit de puissance qui contient les moteurs fonctionne sur
un voltage nominal de 11.1 volts, donc pour cela avec 1400 KV sous 11.1 volts
chaque moteur peut effectuer jusqu'à 15540 tours/minute s'il est
à vide c'est ce qui est appeler rotation par minute RPM.
III.2.4. Electronique Speed Controller « ESC »
:
ESC signifie Electronique Speed Controller Figure
3.5, c'est un circuit électronique qui gère la vitesse
des moteurs brushless. Sur un multi-rotor, chaque moteur obtient son propre
ESC, dont chacun se connecte au contrôleur de vol. Les ESC converties les
séquences des signaux de commande
31
PWM venant du contrôleur de vol ou du récepteur
radio en un signal alternatif triphasé, et entraîne le moteur
brushless en fournissant le niveau d'énergie électrique
approprié.

Figure 3.5: variateur de vitesse « Hobbywing OPTO
ESC 20A ».
Les ESCs utilisés pour ce projet sont de la
série hobbykings 20A spécialement conçus pour les
multirotors, ils ont un large éventail de fonctions de
programmation combinés avec une courbe d'accélération
linéaire. L'ESC doit supporter un ampérage au moins égal
à l'ampérage max des moteurs. Généralement on prend
un ESC d'ampérage un peu supérieur afin qu'il ne chauffe pas.
Dans mon cas les moteurs brushless consomment 16.4A pour une max poussée
« Thrust », j'ai choisie à prendre un ESC de 20A afin de
garder un peu de marge de sécurité.
III.2.5. Batterie LIPO :
Notre système quadrotor besoin beaucoup
d'énergie et a besoin d'une source d'alimentation puissante et en plus
légère, pour cela je suis obligé de travailler avec la
batterie du Lithium-Polymère Figure 3.6. Les batteries
Lithium-Polymère sont des batteries chimiques très puissantes et
assez légère pour le bon vol du quadrotor, en plus elle inclut un
circuit de protection (PCM) qui protège la batterie contre les charges
et décharges excessives et des court-circuités ou
d'explosée [14].

Figure 3.6 : Batterie de Lithium-Polymère
« LIPO » 11.1V 70C 2.2Ah.
J'ai utilisé pour ce projet une batterie LIPO de 3
cellules et d'une capacité de 2200mAh à 11.1 volts avec un Taux
de décharge « C Rating » de 70C et un poids de 225g.
Le Taux de décharge est une façon informelle de
décrire la quantité de courant que la batterie peut fournir en
toute sécurité, Le C se réfère à la
capacité de la batterie et à l'amplitude des heures. Dans notre
cas cette batterie de 70C peut fournir jusqu'à 70 ×
2.2Ah = 154 ampères dans une heure.
Chapitre III Conception et mise en oeuvre du
fonctionnement
32
III.2.6. Les hélices :
Concernant les hélices, il faut les choisir en
fonction de la taille des moteurs et du châssis du quadrotor
utilisé. J'ai choisi les DJI 8045 comme le montre la Figure
3.7. Ces hélices sont fabriquées avec la fibre de
carbone qui est une matière résistante et légère,
elles ont 8 pouces (20 cm) de diamètre et un pas de tangage de 4.5
pouces (un pas de tangage signifie combien de distance que le quadrotor va
aller de l'avant pour une révolution à 360 degrés de
l'hélice).

Figure 3.7 : Hélices DJI 8045.
Comme déjà dit dans le chapitre 1, on prendra
deux de sens horaire et deux de de sens anti horaire en direction de la palme,
ces hélices seront fixé aux moteurs et leur rôle sera de
brassé l'aire pour générer la force de poussée. La
taille de l'hélice varie avec la puissance du moteur, pour bien
comprendre voici quelques règles à respecter pour le bon choix
des différents accessoires :
Plus une hélice est petite, plus elle a besoin de
tourner vite pour être efficace, plus elle est grande, moins elle a
besoin de tourner vite. Sur un gros modèle d'avion par exemple, une
petite hélice même tournant très vite (beaucoup de KV), il
ne suffira pas à le faire voler correctement (pas assez puissante). Donc
il faudra l'équiper d'une grande hélice, qui aura besoin de
tourner moins vite (moins de KV). Les grandes hélices consommant plus
que les petites hélices, une grande hélice devra être
montée sur un moteur puissant (beaucoup de watt) et vice versa.
P(Watt) = U(Volt) X I(A)
I(A) : le courant max qui doit être
délivré par l'ESC au moteur brushless.
U(Volt) : la tension continue de la batterie
LIPO.
P(Watt) : la puissance max admise par le
moteur brushless.
En général : un moteur avec fort KV,
prévue pour petite hélice qui consomme peut a peu de Watts ; et
inversement : moteur avec faible KV, prévu pour grande hélice qui
va consommer beaucoup a beaucoup de Watts.
III.2.7. Arduino Nano :
L'Arduino Nano est une carte petite, complète et
facile à utiliser basée sur l'ATmega328 Figure
3.8. Il a plus ou moins la même fonctionnalité de
l'Arduino Uno, mais dans un package différent. Il ne dispose que d'une
prise d'alimentation DC et fonctionne avec un câble USB Mini-B au lieu
d'un câble standard pour se connecté au PC. L'Arduino Nano peut
être alimenté via une alimentation externe non
régulée 6-20V (broche 30) ou Alimentation externe
régulée 5V (broche 27).
Chapitre III Conception et mise en oeuvre du
fonctionnement
33
La source d'alimentation est automatiquement
sélectionnée pour la source de tension la plus
élevée. Il est généralement destiné pour des
réalisations qui nécessitent la miniaturisation et à
l'installation semi-permanente dans des objets ou des expositions, on l'utilise
souvent dans la réalisation du transmetteur RF.

Figure 3.8 : Arduino Nano.
III.2.8. Module radio NRF24l01 2.4GHz :
Notre système quadrotor reçoit des
données de contrôle en temps réel, il a donc besoin d'avoir
un système radio de bonne qualité. Le transmetteur RF a besoin
d'un module puissant pour envoyer le signal assez loin, mais le
récepteur peut avoir un type normal d'antenne PCB. Le module radio que
j'ai utilisé est celui avec l'antenne à puissance
amplifiée, Figure 3.9.

Figure 3.9 : NRF24l01 Radio module 2.4GHz.
L'NRF24l01 est un module émetteur-récepteur qui
utilise la bande de 2,4 GHz et peut fonctionner avec un débit de 250
Kbps à 2 Mbps à l'air libre. La consommation d'énergie de
ce module est juste d'environ 12 mA au cours de la transmission et la tension
de fonctionnement est de 1,9 Volts à 3,3 Volts. Le module NRF24L01 envoi
et reçoit des données dans des «paquets» de plusieurs
octets à la fois et la communication avec le microcontrôleur se
fait via le protocole de communication SPI. L' NRF24L01 peut utiliser
jusqu'à 125 canaux différents, ce qui permet d'avoir un
réseau de 125 modems indépendants en un seul module. Ces
unités ont beaucoup de complexité interne, mais certaines
personnes talentueuses ont écrit des bibliothèques Arduino qui
nous facilitent la tâche et nous donne beaucoup de liberté en
programmation.
Chapitre III Conception et mise en oeuvre du
fonctionnement
III.2.9. Les joysticks :
Les parties les plus importantes du contrôleur radio
sont les joysticks, mieux dits, les potentiomètres. Un joystick
Figure 3.10, est un dispositif de contrôle du curseur
utilisé dans les jeux informatiques et la technologie d'assistance
basé sur des potentiomètres. Le joystick qui a obtenu son nom du
bâton de contrôle utilisé par un pilote pour contrôler
les ailerons et les ascenseurs d'un avion, c'est un levier à main qui
pivote sur une extrémité et transmet ses coordonnées par
l'intermédiaire d'un microcontrôleur.

Les émetteurs radiocommande des quadrotors comportent
deux potentiomètres de précision dans chaque joystick, dont ils
varient la valeur de la résistance en fonction des accès de
contrôle pour les mouvements Pitch, Roll, Yaw et Throttle, Figure
3.11.
34
Figure 3.10 : Joystick de haute qualité. Figure
3.11 : Commandes de vol du drone.
Dans ce contexte, on utilise l'Arduino Nano pour convertir le
signal d'entrée de chaque potentiomètre en un signal
numérique, puis le module radio NRF24101 permettra d'envoyer les
variations de ces valeurs au récepteur du drone. En fait, ces valeurs
numériques correspondent à la position du bâton de
contrôle de chaque joystick.
III.2.10. La carcasse du quadrotor et du transmetteur
RF:
Le châssis c'est l'élément central du
drone qui détermine son envergure totale. La réalisation d'un
quadrotor de petite taille exige l'utilisation d'un cadre léger, rigide
et harmonique. Ainsi pour le transmetteur RF, il faut couvrir le circuit
imprimé avec une carcasse confortable pour faciliter l'utilisation et
pour le protégé. L'impression en 3D m'a permis de construire les
carcasses voulus à base de nylon ultra polyamide (PLA) en utilisant les
fichiers sources du logiciel SOLID WORKS [15] Figure 3.12.

Chapitre III Conception et mise en oeuvre du
fonctionnement
Figure 3.12 : Les carcasses construites avec logiciel
SOLID WORKS en 3D.
L'architecture du châssis du quadrotor est
optimisée permettant de dégager beaucoup d'espace pour que les
composants soient installés sans difficulté, pour cela j'ai
construit un circuit imprimé permettant de faire le câblage des
ESC et le contrôleur de vol avec la batterie plus facilement comme le
montre la Figure 3.13.
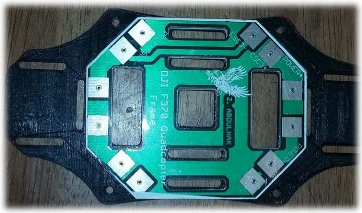
Figure 3.13 : Circuit imprimé du plat inferieur
réalisé avec logiciel Eagle CAD soft.
35
Chapitre III Conception et mise en oeuvre du
fonctionnement
36
III.3. Réalisation du transmetteur RF :
III.3.1. Schéma électronique :
Le circuit électronique de l'émetteur radio 2,4
GHz Figure 3.14, est basé d'un microcontrôleur
Atemega328, NRF24l01 et deux joysticks. Il avait 6 canaux de transmission qui
corresponds aux commandes (Pitch, Roll, Yaw, Throttle et les deux commutateurs
SW1 et SW2).
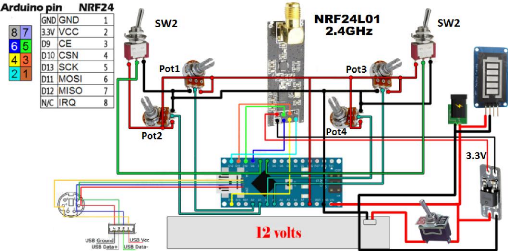
Figure 3.14 : Schéma électronique du
transmetteur RF 2.4 GHz.
Au niveau de l'alimentation nous devons fournir les 12 volts
de la batterie à l'entrée de l'Arduino Nano et au
régulateur de tension 3.3V. Ce dernier est nécessaire pour faire
chuter la tension de 12V à 3.3V, parce que le module NRF24 fonctionne
à cette tension et en plus il absorbe trop de courant ainsi que
l'Arduino ne pourra pas fournir autant de courant. La sortie négative de
la batterie est connecté à l'une des broches GND de l'Arduino et
la sortie positive à l'interrupteur ON / OFF, l'autre broche du
commutateur ira directement à la broche Vin de l'Arduino et à
l'entrée du régulateur de tension 3.3V. Les broches CE et CSN de
la NRF24 doivent être branchées sur les pins numériques de
l'Arduino Nano qui correspondent aux même sens déclaré dans
le programme principale. Même pour les auteurs broches MISO, MOSOI et CLK
qui sont dédiés pour la communication SPI.
Chacun des 4 potentiomètres est connecté aux
entrées analogiques A0, A1, A2 et A3 de l'Arduino Nano. Nous devons
d'abord fournir 5 volts à la broche droite de chaque
potentiomètre et la masse à la broche gauche. De cette
manière, nous aurons 0 volts aux entrées analogiques quand le
potentiomètre est dans la plus basse position et 5 volts quand il est
dans la plus haut et n'importe
Chapitre III Conception et mise en oeuvre du
fonctionnement
quelle tension (de 0 à 5 volts) dans l'intervalle.
L'Arduino Nano a un convertisseur analogique numérique (ADC) de 10 bits
qui nous donnera des valeurs de 0 à 1024 unités. Les deux canaux
de commutateurs SW1 et SW2 sont des canaux numériques et ne sont pas
identiques à celles des potentiomètres, car ils n'ont que des
valeurs de 0 et 1 logique. Le circuit imprimé double face du
transmetteur RF Figure 3.15 est réalisé à
l'aide du logiciel Eagle CAD soft.
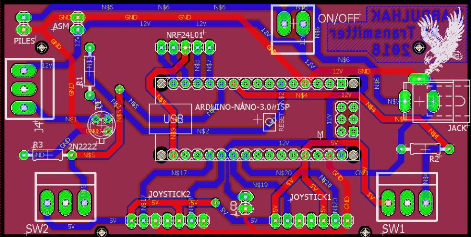
Figure 3.15 : Schéma du circuit imprimé
du transmetteur RF 2.4 GHz.
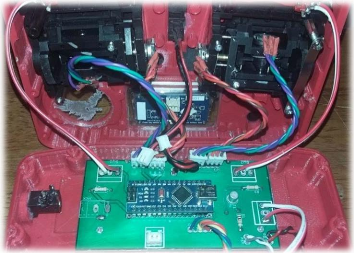
Figure 3.16 : Transmetteur RF 2.4 GHz durant la
réalisation.
37
Chapitre III Conception et mise en oeuvre du
fonctionnement
38
III.3.2. Algorithme du transmetteur RF :
Au début, il est nécessaire de définir
la librairie de l'NRF24 et l'adresse du canal de transmission radio, la
même adresse doit apparaître dans les instructions du programme du
récepteur pour assurer le cryptage de nos informations. Avant de
commencer par le programme principal, il faut calibrer les joysticks en
utilisant L'ADC de l'Arduino Nano. L'utilisation de la fonction AnalogRead
permet de lire les valeurs analogiques de chaque potentiomètre des deux
joysticks qui corresponds aux commandes à envoyer, puis les
affichés sur le moniteur série de l'Arduino IDE à l'aide
de l'instruction Serial.print (" ") en faisant varier la position des joysticks
dont chaque colonne représente la valeur d'un canal "une commande"
Figure 3.17.
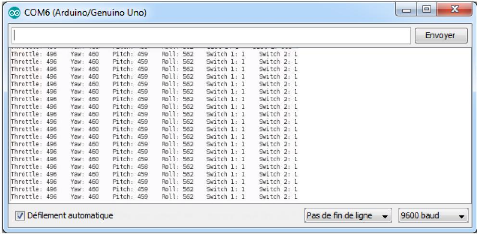
Figure 3.17 : Capture d'écran des valeurs
analogiques affichées sur le moniteur série de l'Arduino
IDE.
Ces valeurs analogiques sont codées sur 10 bits, de
sorte que le taux des potentiomètres peut aller de 0 à 1024 en
décimale. On note ensuite les valeurs correspondantes aux positions
(minimal, centrale et maximal) des joysticks pour les utilisées dans le
programme principal du transmetteur RF, j'ai trouvé
:

Throttle = min : 115 centre : 645 max : 989 Yaw = min : 62
centre : 622 max : 980 Pitch = min : 25 centre : 594 max : 929
Roll = min : 75 centre : 612 max : 974
Comme l'NRF24l01 envoi les données dans des paquets de
8bit/s, alors l'utilisation de la fonctions prédéfinie map(, , ,
, ); dans le programme principale du transmetteur RF permet de coder les
valeurs précédentes à des grandeurs de 8 bits (0 à
255) afin de les envoyer aux récepteur RF
en utilisant la fonction prédéfinit radio.
|
write(&data, sizeof(MyData)).
|
|
Chapitre III Conception et mise en oeuvre du
fonctionnement
La lecture des valeurs numérique des commutateurs SW1
et SW2 sera une valeur booléenne de 0 ou 1 logique (ON/OFF). L'NRF24L01
peut envoyer jusqu'à 32 canaux différents de 8 bits chacun, dans
ce cas nous enverrons que les 6 canaux de 8 bits qu'il correspond enfaite aux
valeurs des commandes: (Tangage, Roulis, Lacet, Gaz et les deux switches). Le
programme Principal du transmetteur RF est expliqué dans cet
organigramme:
Sous-programme mapJoystickValues :
Déclaration des
librairies SPI
&
NRF24l01
Pins direction
Déclaration des
variables 8 bits:
Throttle,
Yaw,
Pitch, Roll,
SW1, SW2
Non
Val< centre
Oui
Void setup :
Codé val de 128 jusqu'à 255
Initialisation des instructions de la
Radio
Déclaration des
variables sur 10
bits:
min,
centre,
max val
Codé val de 0 jusqu'à 128
Void loop :
Déclaration du sous-programme
mapJoystickValues
|
|

Codé les valeurs de 10 bits et les Affectés aux
variables à envoyer En utilisant le sous-programme mapJoystickValues
Throttle = mapJoystickValues (lire de A0, 115, 645, 989) Yaw =
mapJoystickValues (lire de A1, 62, 622, 980) Pitch = mapJoystickValues (lire de
A2, 25, 594, 929) Roll = mapJoystickValues (lire de A3, 75, 612, 974)
SW1 = lire la valeur digitale du pin 7
SW2 = lire la valeur digitale du pin 8
39
Transmettre DATA :
radio.write
|
(&data,
|
sizeof(MyData))
|
|
Chapitre III Conception et mise en oeuvre du
fonctionnement
40
III.4. Récepteur RF 2.4 GHz :
Tout émetteur a besoin d'un récepteur.
Habituellement, les récepteur radio génèrent des signaux
de sortie PWM qui varie de 1000 à 2000 microsecondes, parce que c'est
les largeurs d'impulssion nécessaire pour le fonctionnement des ESCs.
Dans ce contexte, l'utilisation des registres de Timer de l'Arduino Nano permet
facilement de généré les signaux PWM pour les 6
différents canaux qui correspondent enfaite aux mêmes valeurs de 8
bits envoyés par le transmetteur.
III.4.1. Circuit et schéma électronique
:
Le circuit électronique du récepteur radio 2,4
GHz est basé sur les mêmes composants que le transmetteur
l'Arduino Nano, NRF24l01 et la socket-8-pin pour NRF24 qui détient d'un
régulateur de 3.3v ASM1117. Les connexions de l'Arduino Nano au NRF24l01
sont les mêmes que dans le transmetteur radio, comme il est
illustré dans le schéma ci-dessus Figure
3.18.
Les connexions au module radio sont les mêmes que dans
le cas du transmetteur. Pour alimenter le récepteur nous pourrions
obtenir 11.1 volts directement de la batterie Lipo du drone. Les broches D2,
D3, D4, D5, D6 et D7 sont utilisés comme canaux de sortie PWM car ils
peuvent générer ces signaux et proviennent du même registre
de PORT (DDRD).
(CH1: D2, CH2: D3, CH3: D4 et CH4 : D5) sont les canaux qui
corresponds respectivement aux commandes (Throttle, Yaw, Pitch et Roll) tandis
que (CH5: D6) et (CH6: D7) sont les deux canaux auxiliaires numériques
destinés pour les switches.
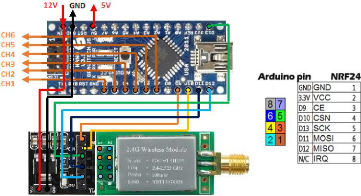
Figure 3.18 : Schéma électronique du
récepteur RF 2.4 GHz
Le circuit imprimé double face du récepteur RF
Figure 3.19 est réalisé à l'aide du
logiciel Eagle CAD soft.
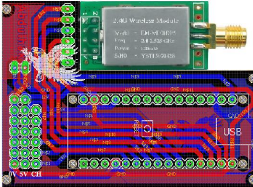
Chapitre III Conception et mise en oeuvre du
fonctionnement
Figure 3.19 : Schéma du circuit imprimé
du récepteur RF 2.4 GHz
III.4.2. Algorithme du récepteur RF 2.4GHz :
Nous commençons le code en initialisant la
configuration de l'interruption PWM et la bibliothèque du module NRF24,
au début on utilise la même adresse du canal que dans
l'émetteur radio. L'Arduino nano reçoit chaque paquet de
données de 8 bits dans chaque canal, ce qui nous donne des valeurs
décimales au maximum de 255, pour lire ces valeurs dans l'Arduino Nano
du récepteur
il suffit d'utiliser la fonction prédéfinie
radio.
|
read(&data,
|
sizeof(MyData)). L'utilisation de la
|
|
fonction prédéfinie map (, , , ,);permet
de codées ces valeurs de 8 bits pour que les signaux s'arrange entre
1000ìs et 2000ìs. La fonction prédéfinie du
comptage writeMicroseconds (); permettent de gérer les périodes
des signaux PWM avec précision.
L'algorithme du transmetteur RF est expliqué
ci-dessous:
Déclaration des librairies SPI
&
NRF24.
Initialisation du registre Timer à
0.
Définir la fréquence des signaux
PWM à 50
Hz.
Définir PWM_period.
Déclaration des 6
variables
« PWM_largeur » pour les sorties
(2, 3, 4, 5, 6 et
7).
Déclaration des variables de 8
bits à
être reçu : Throttle, Pitch,
Roll, Yaw, SW1 et SW2.
Activer
le compteur millis.
Déclaration du variable 32 bits de
comptage :
« PreviousMillis ».
Définir les broches D2, D3, D4,
D5,
D6 et D7 du Port D comme
sorties.
Déclaration du variable
32 bits de réception
des
données :
« LastRecvTime »
41
Void setup :
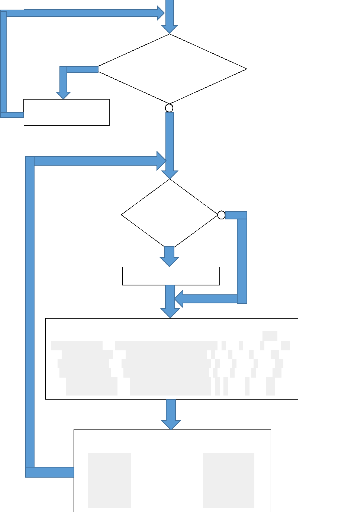
Chapitre III Conception et mise en oeuvre du
fonctionnement
Commencer la
communication radio
Sous-programme de réception des données
Oui
Voir si le signal radio est disponible : radio.available ( )
Lire et recevoir les données de 8 bits
Non
Void loop :
Non
Vérifier si le signal est perdu
Oui
Réinitialiser les données
Codé les valeurs reçues de 8 bits sur 1000
à 2000 et les Affectés aux
variables PWM_largeur en utilisant
la fonction prédéfinie map
ch1_value = map(received_data.Throttle,0,
255,1000,2000);
ch2_value =
map(received_data.Yaw,0,255,1000,2000);
ch3_value =
map(received_data.Pitch,0,255,1000,2000);
ch4_value =
map(received_data.Roll,0,255,1000,2000);
ch5_value = map(received_data.SW1,0,1,
1000,2000);
ch6_value = map(received_data.SW2,0,1,
1000,2000);
Générer les signaux PWM avec la fonction
prédéfinie
writeMicroseconds (); pour chaque
canal
channel_1.writeMicroseconds(ch1_value);
channel_2.writeMicroseconds(ch2_value);
channel_3.writeMicroseconds(ch3_value);
channel_4.writeMicroseconds(ch4_value);
channel_5.writeMicroseconds(ch5_value);
channel_6.writeMicroseconds(ch6_value);
42
Chapitre III Conception et mise en oeuvre du
fonctionnement
43
III.4.3. Test des signaux de sortie du récepteur RF
:
Après la construction de l'émetteur RC et du
récepteur, nous devons tester les signaux de contrôle PWM sortant
du récepteur car ce sont les impulsions de commande à introduire
au contrôleur de vol. On peut connecter les broches numériques de
sortie du récepteur RF au canal d'entré d'un oscilloscope afin
que nous puissions visualiser un seul signal PWM puis on fait varier les
positions des joysticks.
Pour voir la variation des quatre signaux tous à la
fois, j'ai utilisé un petit programme de test pour Arduino qui apporte
les valeurs des signaux de commandes PWM sur le moniteur série de
l'Arduino IDE, ces valeurs vont de 1000ìs jusqu'à 2000ìs
avec une impulsion centrale de 1500ìs, Figure 3.20.
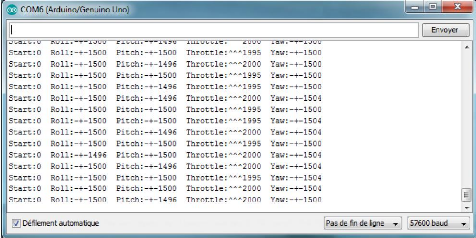
Figure 3.20 : Valeurs correspondantes aux signaux PWM
afficher sur le moniteur série de l'Arduino IDE.
III.5. Contrôleur de vol du quadrotor :
Dans le schéma de la Figure 3.21,
j'ai mis la diode D1 pour protéger le port USB de l'ordinateur lorsque
l'Arduino est connecté à l'ordinateur lors de la programmation.
Les résistances R2 = 1kÙ et R1 = 1,5kÙ divisent la tension
de la batterie de vol par 2,5. De cette façon, il est possible de
mesurer la tension de la batterie pendant le vol en utilisant AnalogRead
à partir de la broche A0 de Arduino Uno. La LED est mise pour
l'indication d'état de la batterie, elle s'allumera lorsque la tension
de la batterie devienne basse.

Chapitre III Conception et mise en oeuvre du
fonctionnement
44
Figure 3.21 : Schéma électronique du
contrôleur de vol du quadrotor.

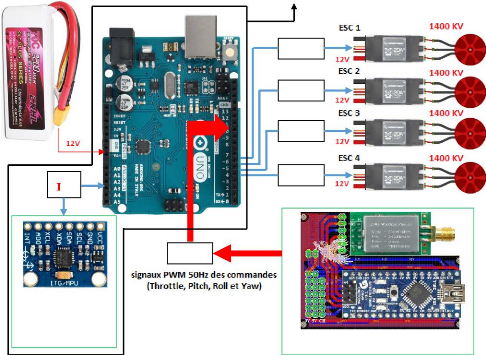
IMU
(Gyro& Accéléromètre)
MPU-6050
2C
PWM
PWM
PWM
PWM
PWM
Récepteur Radio 2.4Ghz
Figure 3.22 : Schéma électronique global
du quadrotor.
Chapitre III Conception et mise en oeuvre du
fonctionnement
III.5.1. Lecture des signaux du récepteur RF :
Dans cette partie, je montre comment lire et calculer les
largeurs des impulsions PWM venant du récepteur RF afin qu'ils puissent
être utilisés pour contrôler le mouvement du quadrotor, et
pour mieux comprendre le fonctionnement du contrôleur de vol, j'aime
montrer au début les principes de base pour les signaux du
récepteur.
Les ESC sont contrôlés par des trains
d'impulsions PWM variant de 1000ìs à 2000ìs avec une
amplitude de 5v, c'est à dire que la position d'arrêt de l'ESC est
généralement atteinte avec une impulsion de 1000ìs et une
accélération maximale est atteinte avec une impulsion de
2000ìs, la longueur de l'impulsion change lorsque nous changeons la
position du joystick sur l'émetteur RC Figure 3.23. Les
systèmes multicopters sont très instables et la stabilité
est obtenue par d'énormes corrections par seconde, par exemple le
contrôleur de vol de ce projet fait 250 correction / seconde ceci est
également connu comme le taux de rafraîchissement ou la
fréquence du contrôleur, en bref cela signifie que les quatres ESC
sont corrigés tous les 4ms (la fréquence des signaux PWM à
fournir au ESCs par le contrôleur de vol est de 250 Hz).
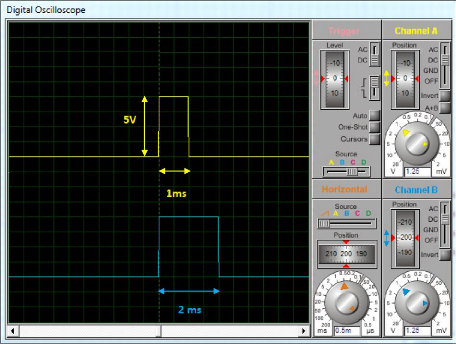
Figure 3.23 : Simulation des pulsations PWM de
fréquence 50 Hz pour deux canaux du récepteur RF.
45
Chapitre III Conception et mise en oeuvre du
fonctionnement
46
Dans notre cas, la fréquence des signaux PWM du
récepteur RF (50 Hz) est cinq fois plus faible que la fréquence
du contrôleur de vol (250 Hz), cela signifie que le quadrotor ne peut pas
attendre les signaux du récepteur lors du vol.
Malgré tout cela, le processeur de l'Arduino Uno
"ATmega328p" nous donne des outils pour faire résoudre à ce
problème en utilisant les interruptions de changement d'état de
broche «Pin Change Interrupt Register PCI0». Ça signifie que
nous pouvons interrompre le programme en cours pour effectuer une tâche
spéciale lorsque l'état logique de la broche numérique
change, après cette interruption le processeur continue
l'exécution du programme d'une façon normal. Cependant cette
méthode nécessite moins de boucles CPU donc il faut garder la
routine d'interruption aussi courte que possible, sinon on va gâcher
l'exécution du programme en cours.
L'interruption de changement de broche « PCI0 » se
déclenchera si l'une des broches PCINT7 à PCINT0 se bascule
d'état, les bits (PCINT0, PCINT1, PCINT2 et PCINT3) qui correspondent au
registre d'interruption « PCI0 » se réfèrent
respectivement aux broches numériques (8, 9, 10 et 11) de l'Arduino
Figure 3.24, selon le schéma du contrôleur de vol
Figure 3.21 les entrées du récepteur sont
connectées aux broches numériques 8 à 11.
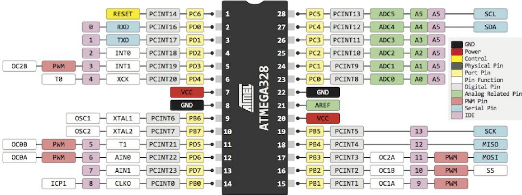
Figure 3.24 : Diagramme des broches de
l'ATmega328p.
Dans le programme du contrôleur de vol, on peut
créer des sous-programmes d'interruption qui serait toujours
exécutées chaque fois que les broches numériques 8
à 11 changent d'état logique, ceci consiste à mesurer le
temps entre les fronts montants et descendants des impulsions PWM venant du
récepteur. L'organigramme suivant explique une partie du sous-programme
de l'interruption pour lire un seul canal « canal 1 » du
récepteur, la même partie se répète pour les autres
canaux sauf que les différents canaux du récepteur sont
liées à des différentes broches du registre PORTB.
Chapitre III Conception et mise en oeuvre du
fonctionnement
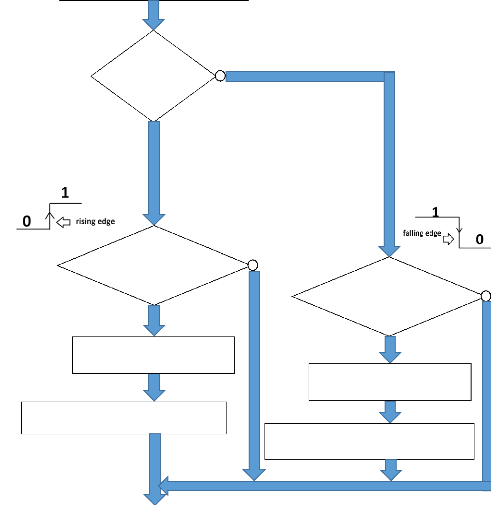
Voir si on a un front Non Voir si on a un front
Montant Descendant
Précédente_canal 1=0
La même routine se répète pour les autres
canaux {canal 2 (PINB1), canal 3 (PINB2) et canal 4 (PINB3)}, le sous-programme
de l'interruption est appelé chaque fois dans le programme principal du
contrôleur de vol si l'une des entrées 8, 9, 10 ou 11 change
d'état. Les variables d'entrées du
Affecter la variable Time 1 dans la variable Temp actuelle
(Time 1 =Temp actuelle)
Se souvenir de l'état actuel du variable
(Précédente_canal 1=1)
Oui
Le bit 0 du
PORTB
(PINB0=1)?
Oui
Non
Calculer la longueur de l'impulsion du canal 1 Reciver_input
1 = Temp_actuelle - Time1
Se souvenir de l'état actuel du variable
(Précédente_canal 1=0)
Précédente_canal 1=1
L'entrée PINB0 se Bascule de 1 à 0
Oui
Non
47
Sous-programme d'interruption :
Activer le registre de L'interruption de changement de broche
« PCI0 »
Affecter le compteur us dans la variable Temp actuelle = micros
( );
Chapitre III Conception et mise en oeuvre du
fonctionnement
48
récepteur (Reciver_input 1, 2 et 4) de la routine
d'interruption sont destinées pour le calcul des points de consigne
(Pitch, Roll et Yaw) du contrôleur PID afin de contrôler les
impulsions PWM des ESC. L'entrée « Reciver_input 3 » qui
correspond à la commande «Throttle », est mise comme un signal
de base pour accélérer les moteurs. Cette image Figure
3.25, représente les axes du roulis (Roll), tangage (Pitch) et
lacet (Yaw) d'un aéronef.
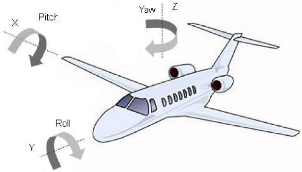
Figure 3.25 : Les mouvements de base.
L'angle de roulis positif soulève l'aile gauche et
abaisse l'aile droite, l'angle de tangage positif soulève le nez et
abaisse la queue et l'angle de lacet positif déplace le nez vers la
droite. Ceci est la norme utilisé pour ce contrôleur de vol du
quadrotor.
Pour plus d'informations sur les registres utilisés
dans le programme, voir le manuel du datasheet pour l'ATMEGA328p dans l'annexe
de ce mémoire.
III.5.2. Unité de mesure de l'inertie gyroscopique
MPU-6050 :
Dans cette partie, je montre comment lire et traiter les
données venant du Gyroscope. Plus précisément, nous allons
extraire les données du Gyro afin que le contrôleur de vol puisse
calculer les angles parcourus par le quadrotor pour les axes de mouvements
(Pitch, Roll et Yaw) en utilisant des opérations mathématiques
simples, puis les transformer en instructions algorithmiques adaptées
à Arduino.
Le Gyro est un capteur de taux d'angle à trois axes
(x, y et z), il mesure la vitesse angulaire en degrés par seconde de ces
axes en même temps. Les données d'entrées du Gyro sont
couplées linéairement avec sa sortie, signifie que la longueur de
l'impulsion de sortie change proportionnellement lorsque le Gyro est
tourné autour de ces axes. Pour connaître la valeur de sortie
exacte de l'MPU-6050, nous devons jeter un coup d'oeil sur la fiche technique
du Gyro MPU6050 mentionnée dans la page (12 of 52) de l'annexe de ce
mémoire. La sortie sera de 65,5 en décimal lorsque la vitesse
angulaire du Gyro est de 1°/sec, car nous utilisons 500°/sec comme
vitesse angulaire maximale pour les trois axes du Gyro.
Chapitre III Conception et mise en oeuvre du
fonctionnement
Par exemple si le Gyro fait tourner autour de son axe de lacet
(Yaw) et que nous terminons le tour complet (360°) exactement à une
minute (60 sec), la sortie du Gyro à n'importe quel moment de ce
parcourt sera de 6°/sec × 65.5 = 393, car à chaque seconde le
Gyro tourne 6°. Dans le programme Arduino il sera donc :
Angle°/sec = sortie Gyro / 65,5. Le résultat
« Angle°/sec » sera déclarée comme une variable
flottante et la sortie du Gyro est une valeur signée de 16 bits (la
sortie du gyroscope est une valeur de complément de 16 bits deux) qui
est similaire à un entier « Int » dans l'Arduino. Cela
signifie que la variable « sortie Gyro » doit être
déclarée comme un entier car elle peut atteindre 32750 si la
vitesse angulaire du Gyroscope atteint les 500°/sec (sortie Gyro =
500°/sec × 65.5 = 32750). La plupart des Gyro ont un petit
décalage moyen (offset) qui provoque la dérive du quadrotor donc
le Gyroscope doit être calibré avant d'utiliser ces données
de sortie. Pour obtenir les meilleurs résultats, la sortie du Gyro doit
être mise à zéro et ceci est simplement fait en prenant
l'offset pour plusieurs lectures et en les soustrayant des plusieurs valeurs de
la sortie du Gyro. Ceci est expliquer dans cet organigramme de boucle for (;;)
qui paresse dans le void setup :
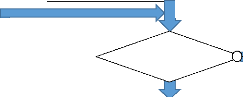
Variables entiers 16 bits : Int_cal = 0
Initialiser les
Variables 8 bits : lowByte, highByte
Initialiser les Variables 64 bits :
gyro_pitch,
gyro_roll, gyro_yaw, cal_axe_x, cal_axe_y,
cal axe z
Int_cal < 2000 ?
Pour exécuter Non
Le code 2000 fois Oui
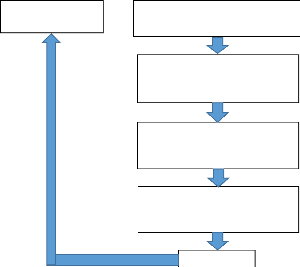
L'axe Pitch
L'axe Roll
L'axe Yaw
Ajouter la valeur lue gyro_pitch
de l'axe x du Gyro
à la variable
cal_axe_x
Ajouter la valeur lue gyro_roll
de l'axe y du Gyro à
la variable
cal_axe_y
Ajouter la valeur lue gyro_yaw
de l'axe z du Gyro à
la variable
cal_axe_z
Incrémenter par 1
Int cal + +
Sous-programme de lecture des
données du Gyro
MPU-6050
Tarder 3 ms
49
Diviser la variable
cal_axe_x par 2000 pour
obtenir
l'offset de l'axe x
Diviser la variable
cal_axe_y par 2000 pour
obtenir
l'offset de l'axe y
Diviser la variable
cal_axe_z par 2000 pour
obtenir
l'offset de l'axe z
Reste du programme.
Chapitre III Conception et mise en oeuvre du
fonctionnement
50
Cet organigramme calcule l'offset moyenne de 2000 lectures de
Gyro pour les 3 axes, puis il stocke chacune de ces valeurs d'offset dans les
variables (cal_axe_x, cal_axe_y et cal_axe_z). Après
cette étape l'offset est soustraite de chaque mesure du Gyro dans le
reste de la boucle du programme.
· Sous-programme de lecture des données du
Gyro :
L'Arduino Uno du contrôleur de vol lit les
données des angles parcouru par le Gyro à partir des registres de
sortie d'adresses 0x69 et 0xA8 qui sont à 16 bits en utilisant le
protocole de communication I2C. Par exemple pour lire l'axe «
Yaw » on lit les 8 bits du poids fort du registre 16 bit à part,
puis les 8 bits du poids faible et on fait un décalage pour avoir les 16
bit puis on affecte le résultat au variable « gyro_yaw ».
Toutes les autres parties intéressantes pour la
communication I2C avec le Gyro sont gérées par la
librairie "wire" qui nous facilitent la tâche.
L'organigramme qui explique le processus est situé dans
la page suivante.
Chapitre III Conception et mise en oeuvre du
fonctionnement
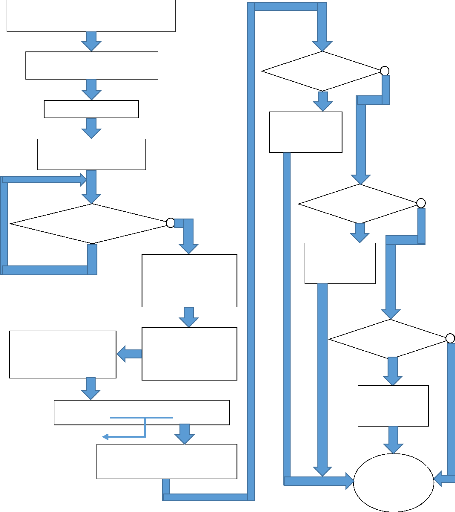
Commencer la communication I2C
avec le Gyro
(registre d'adresse 0x69)
Commencer à lire du registre
d'adresse 0xA8
Fin de transmission
Demander 6 octets du
registre d'adresse 0x69
Attendre jusqu'à les 6 octets Soient reçus
Octets valables < 6 ?
Non
Oui
Réception du 1ier
Byte du
poids
faible des données
angulaire lowByte
Compenser l'offset Après le calibrage Jusqu'à
Int_cal = 2000
Int_cal = 2000?
Non
Oui
gyro_roll =
cal_axe_y -
gyro_roll
Int_cal = 2000?
Oui Non
gyro_pitch =
cal_axe_x -
gyro_pitch
Non
Oui
gyro_yaw =
cal_axe_z -
gyro_yaw
Fin du
sous-
programm
Int_cal = 2000?
Réception du 2nd
Byte du poids
fort
des données
angulaire highByte
gyro_pitch =
(highByte X 256) +
lowByte
gyro_roll = (highByte X 256) + lowByte
Décalage de highByte
Par 8 positions
gyro_yaw = (highByte X 256) + lowByte
51
Après l'étape de calibrage, il est
nécessaire de calculer l'angle total parcouru par le Gyro afin que le
contrôleur de vol puisse reconnaître la position exacte du
quadrotor dans l'espace. Pour cela il suffit simplement d'intégrer au
fil de temps tous les valeurs de sortie Gyro (les données de la vitesse
angulaire des axes Pitch, Roll et Yaw) par exemple pour l'axe Yaw :
Chapitre III Conception et mise en oeuvre du
fonctionnement
52
Angle parcouruya11, =E sortie
Gyroya11, x At.
Dans le cas de notre contrôleur de vol, la
fréquence de rafraîchissement est de 250 Hz, on peut donc extraire
les angles parcouru par le Gyro pour chaque axe toutes les 4 ms au lieu de 1s.
Cela signifie également que nous devons diviser les données de
sortie Gyro sur 65,5 et ensuite diviser à nouveau sur 250 pour obtenir
l'angle parcouru par le quadrotor chaque 4 ms.
J contrôleur de vol = 250 Hz - At = 4 ms
Angle parcouruyau, = 1(sortie Gyroyau,
/(250/65.5))
= E(sortie Gyroyau, x 0.0000611)
L'intégrale en mathématique signifie la
sommation d'une fonction sur un intervalle donné, donc dans le code
Arduino on fait la somme de toutes les données gyroscopiques de sortie
pour chaque axe à part dans un intervalle de 4ms, par exemple pour l'axe
z « Yaw » se traduire par cette instruction :
Angle parcouruyau, est : Angle_yaw_entrée +=
gyro_z * 0.0000611;
C.à.d. : Angle_yaw_entrée =
Angle_yaw_entrée précédente +
(gyro_z x 0.0000611) Vérifions la
validité de cette relation avec le dernier exemple pour une rotation
complète (360°) du Gyro autour de son axe (Yaw) dans 60s, on aura
:
· La sortie du Gyro en décimal à n'importe
quel moment pendant la rotation est : sortie Gyroyau, = 393.
· Pendant la rotation, les données du Gyro sont
ajoutées 250 fois par seconde donnant un total de 15000 lectures :
250lecture P/s x 60s = 15000 lecture
· Pour une minute on aura donc :
Angle parcouruyau, = 15000 lecture x 393 x 0.0000611
= 360.18° 360°
Ce qui est assez proche pour un tour complet, d'où la
formule est juste.
L'inconvénient du Gyro MPU6050 c'est que le signal de
sortie est très bruyant Figure 3.27.
L'utilisation d'un simple filtre complémentaire permet
de réduire le bruit qui accompagne le signal
de sortie du Gyro, alors l'instruction précédente
devienne:
Angle_yaw_entrée = (Angle_yaw_entrée *
0.7) + (gyro_z * 0.0000611);
C.à.d. : Angle_yaw_entrée =
(Angle_yaw_entrée précédente x 0.7) + (gyro_z x
0.0000611)
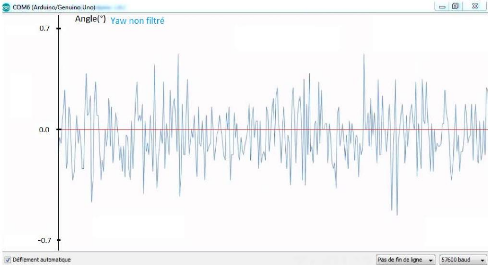
Chapitre III Conception et mise en oeuvre du
fonctionnement
Figure 3.27 : Signal de sortie du Gyro dans l'état
stationnaire pour l'axe de mouvement Yaw afficher sur le moniteur série
de l'Arduino IDE.
Enfin, l'instruction Angle_yaw_entrée
détermine le taux angulaire ou l'angle parcourus « Yaw
» à introduire pour l'entrée de la boucle PID. La même
instruction sera appliquer pour les autres axes de mouvement Pitch et Roll.
III.5.3. Le contrôleur PID :
Le contrôle par PID est la méthode la plus
simple à programmer sur un processeur et elle est souvent
employée pour les asservissements [16].
Cette méthode est basée sur une structure qui
délivre un signal de commande à partir de l'erreur existante
entre la référence et la mesure de son intégrale et de sa
dérivée Figure 3.28.
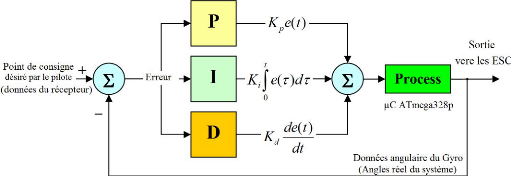
Figure 3.28 : Schéma de la boucle de
contrôleur PID.
53
Chapitre III Conception et mise en oeuvre du
fonctionnement
54
Chapitre III Conception et mise en oeuvre du
fonctionnement
Le contrôle par PID est souvent utiliser dans
l'industrie car il est très simple à mettre en place et
s'avère efficace à réduire les erreurs pour la plupart des
systèmes réels non linéaires. Dans notre cas le principe
de base du contrôleur PID est simple, lorsque le drone se trouve
déséquilibré à cause du vent ou de la turbulence,
l'algorithme envoie une commande vers les ESC qui provoque une réaction
dont le sens est opposé à celui qui a conduit au
déséquilibre, afin que le drone retrouve l'état
souhaité. Plus précisément, il faut garder les valeurs
mesurées du Gyro (données angulaires réel du
système) identique au point de consigne désiré par le
pilote (données d'entrée du récepteur de la routine
d'interruption) Figure 3.29.
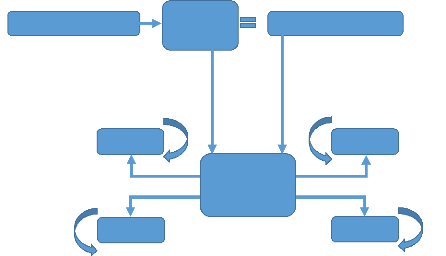
Données d'entrées du récepteur
Données d'entrée du Gyro
(Reciver_input 1, 2 et 3) (Taux angulaire)
Sens antihoraire
Données du Récepteur
Sens horaire Sens antihoraire
Moteur 4
Moteur 3
Conversion en °/ sec
Contrôleur PID
Données du Gyroscope
Moteur 1
Moteur 2
Sens horaire
Figure 3.29 : Schéma montre le principe du PID
utilisé dans ce contrôleur de vol.
Par exemple si le pilote ne veut aucun mouvement, le taux
angulaire Gyro doit être également nul, donc l'erreur du
système « ???? » pour un axe de mouvement est la
différence :
???? = (Données d'entrée du Gyro -
Données d'entrées du récepteur).
Le contrôleur PID calcule les corrections
nécessaires pour les trois axes (Pitch, Roll et Yaw), Les consignes pour
le contrôleur PID sont les signaux d'entrée du récepteur et
les variables des mouvements angulaires mesurées par le gyroscope, Les
sorties du contrôleur PID sont destinées pour contrôler la
vitesse des moteurs du quadrotor afin d'assurer l'équilibre.
L'utilisation des opérateurs mathématiques (Proportionnel,
Intégrateur et Dérivateur) permet de produire une sortie de
commande adéquate pour le système. Le modèle
mathématique du contrôleur PID est décrit comme suit :
????????????(????)
????(????) = ????????????(????) +
???????? ? ????(????)???????? + ????????
???????? , Tel que :
0
55
????(????) : L'erreur du système.
????(????) : Variable de sortie du PID.
???????? : Gain proportionnel.
???????? : Gain d'intégration. ???????? : Gain de
dérivation.
· Effet proportionnel ???????? ???? (????)
: Ce terme est proportionnel à l'erreur, il contribue
à la stabilité et
à la réactivité et permet une
augmentation du temps de réponse du système, en fait le
contrôleur seul n'est pas tout à fait suffisant pour stabiliser le
drone [17].
????
· Effet d'intégral ???????? ?
????(????)???????? : Ce terme est proportionnel à
l'intégrale de l'erreur, il permet au ????
système d'atteindre le point de consigne
désiré, permet aussi d'éliminé l'erreur statique du
système et de diminuer l'impact des perturbations [17], il en
résulte un système précis.
????????(????)
· Effet de la dérivée
???????? : Ce terme est proportionnel à la
dérivée de l'erreur, il permet
????????d'accéléré la
réponse du système et d'éliminé les oscillations
autours du point de consigne [17].
· Saturation du contrôleur PID et choix des
gains [18] :
Pour empêcher le PID de devenir incontrôlable, il
est nécessaire de limiter la sortie PID à une valeur critique qui
est le point de saturation du système et ça se détermine
selon les caractéristiques du système et l'algorithme du
contrôleur PID utilisé. Cette limitation est souvent
appliquée pour la sortie globale du contrôleur PID. Chaque
quadrotor est caractérisé par ces propres gains PID,
généralement les gains PID varis d'un drone à l'autre en
fonction du poids et du hardware utilisé. La
mise en oeuvre de la commande PID exige d'abord une
sélection adéquate des gains ???????? , ???????? et ???????? car
la réponse de la sortie PID sera influencée en agissant sur ces
trois gains. Pour notre système les gains seront
déterminés expérimentalement.
· Algorithme PID du contrôleur de vol
:
Dans le programme du contrôleur de vol, trois
contrôleurs PID sont utilisés pour les trois axes de mouvement
essentiels (Pitch, Roll et Yaw). Au début, il est nécessaire de
transférer les variables des canaux d'entrée du récepteur
(de la routine d'interruption) en degrés / seconde pour avoir les trois
points de consigne de mouvement, identiques en grandeurs que les données
d'entrée du Gyro. L'organigramme suivant explique l'étape de
conversion des variables du récepteur en degrés / seconde pour un
axe de mouvement « Roll », la même routine se
répète pour les deux autres axes «Pitch et Yaw ».
Chapitre III Conception et mise en oeuvre du
fonctionnement
Initialiser la variable flottante point
de consigne Roll
à zéro :
Pid_Roll_consigne = 0
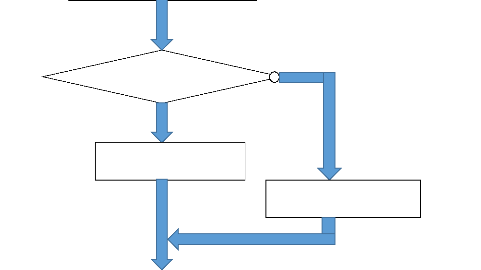
Du récepteur par 3 Permet d'obtenir
Un taux de Roll max Approximatif à 166 ° / s
Roll max = (2000 - 1500) ~ 3
La division de signal
166 ° / s
Reciver_input 1 >= 1500 ?
Pid_Roll_consigne =
(Reciver_input 1
-1500) ~ 3
Oui
1500 (en décimal) est la valeur centrale du
Reciver_input 1 Qui correspond à la position centrale du joystick "canal
Roll"
Non
Reciver_input 1 < 1500
Pid_Roll_consigne =
(Reciver_input 1
-1500) ~ 3
Roll max = (1000 - 1500) ~ 3
-166 ° / s
Les entrées du contrôleur PID {données du
récepteur : (Pid_Roll_consigne, Pid_Pitch_consigne, Pid_Yaw_consigne) et
les données angulaires du Gyro : (angle_roll, angle_pitch, angle_yaw)}
sont connues, reste à déterminer les variables de sortie PID pour
les mouvements (Pitch, Roll et Yaw). Dans le sous-programme PID les trois
parties (proportionnel, intégral et dérivé) sont
calculées simultanément et combinées à un seul
signal de sortie pour chaque axe de mouvement Figure 3.30.
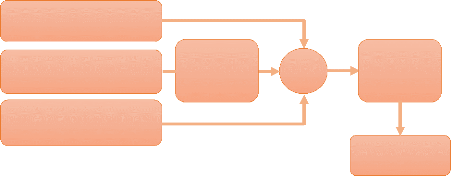
Intégral
Sortie (I) = Sortie (I) + [E ×
Gain (I)]
Sortie (D) = (E -
E????????é????é) ×
Gain (D)
Proportionnel
Sortie (P) = E
× Gain (P)
Dérivé
Limiter la
sortie au point
de saturation
+
Sortie PID pour un axe de mouvement
Limiter la
sortie au point
de saturation
56
Figure 3.30 : L'algorithme utilisé dans le
sous-programme PID du contrôleur de vol pour un axe de
mouvement.
·
Chapitre III Conception et mise en oeuvre du
fonctionnement
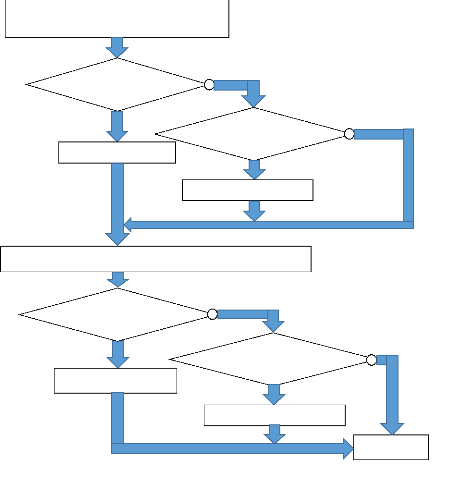
Oui
Limiter
Oui
La sortie Intégrale
Sortie i roll = 400
Sortie_ i _roll > 400
Sortie i roll = - 400
Sortie_ i _roll < -400
400 c'est la valeur max du PID
Non - 400 c'est la valeur min du PID
Limiter la sortie Intégrale
Non
Oui
Non
Oui
????????????é????é
= ????
Pid_sortie_roll = (???? ????
X ????) + (Sortie_ i _roll)
+ ???????? X (???? -
????????????é????é)
Pid_sortie_roll = 400
Pid_sortie_roll > 400
Limiter la sortie PID globale
Pid_sortie_roll = - 400
Pid_sortie_roll < -400
Calcul du Sortie PID Pour l'axe Roll
57
Intégral de l'erreur statique ???? pour Roll: Sortie_ i
_roll = Sortie_ i _roll + (???????? X
????)
Sous-programme de sortie PID :
L'organigramme suivant explique le calcul du sorties PID pour un
axe de mouvement « Roll ».
La même routine se répète dans le
sous-programme PID du contrôleur de vol pour les deux autres axes
«Pitch et Yaw ».
|
Initialiser les variables flottantes à
zéro : ????
????????????é????é
Sortie_i_roll
pid sortie roll
|
|
Calcul de l'erreur statique ???? pour Roll :
???? = Angle_roll_entrée - Pid_Roll_consigne
|
Chapitre III Conception et mise en oeuvre du
fonctionnement
Eprécé = e L'erreur actuelle e devienne l'erreur
précédente Eprécé Pour le prochain calcule.
III.5.4. Contrôle des ESC :
Dans cette partie, le but est de générer les
impulsions de commande à envoyer pour les quatre ESCs en fonction des
variables de sorties PID, afin de contrôler la vitesse des moteurs du
quadrotor. Les ESC sont connectés à l'Arduino Uno du
contrôleur de vol via les broches digitales (D4, D5, D6 et D7) du
registre PORTD. Au début du programme principal, ces broches
numériques doivent être déclarés en tant que
sorties. Après avoir calculé les variables de sortie du
contrôleur PID pour les axes de commande (Pitch, Roll et Yaw), il devient
possible de calculer les largeurs d'impulsion à fournir pour les ESC
toutes les 4 ms afin de corriger la position du quadrotor.
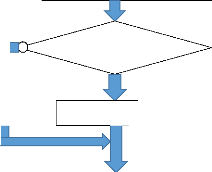
Throttle est mis comme le signal
De base pour le calcul
des
Impulsions des ESCs
Affecter le signal Throttle à la variable entière
d'accélération :
Accélération = Reciver_input
3
Non
Accélération> 1800
Oui
Accélération = 1800
Laisser 200us de gap pour garder le contrôle Total à
plein vitesse
Calcul des impulsions de correction :
Largeurs d'impulsion esc 1 Largeurs d'impulsion esc 2 Largeurs
d'impulsion esc 3 Largeurs d'impulsion esc 4
58
esc_1 = accélération - Pid_sortie_pitch +
Pid_sortie_roll - Pid_sortie_yaw esc_2 = accélération +
Pid_sortie_pitch + Pid_sortie_roll + Pid_sortie_yaw esc_3 =
accélération + Pid_sortie_pitch - Pid_sortie_roll -
Pid_sortie_yaw esc_4 = accélération - Pid_sortie_pitch -
Pid_sortie_roll + Pid_sortie_yaw

Au début, il est nécessaire de déclarer
le signal d'entrée du récepteur Throttle « Reciver_input 3
» comme la variable de base d'accélération. Pour assurer que
les trois contrôleurs PID ont suffisamment d'espace pour corriger le
quadrotor à pleine vitesse, la variable d'accélération est
limitée à 1800 ìs au lieu de 2000 ìs. De cette
façon, chaque contrôleur PID peut ajouter 200 ìs
supplémentaires en cas de besoin. Pour calculer les impulsions des ESC,
il suffit de combiner les variables de sorties PID séparées
(Pitch, Roll et Yaw) et de les ajouter ou les soustraire à la variable
d'accélération suivant cet algorithme :
Chapitre III Conception et mise en oeuvre du
fonctionnement
59
La Figure3.31 représente les axes Roll,
Pitch et Yaw du quadrotor, la correction des impulsions des ESCs se fait selon
les quatre instructions de l'algorithme citées en haut.
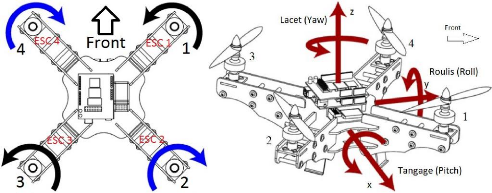
Figure 3.31 : Disposition des ESCs et direction de
rotation du quadrotor
Pour l'axe de Roulis, si le quadrotor penche vers la droite en
raison du vent ou de la turbulence, cela conduit le Gyro d'envoyer un angle de
roulis positif (Données d'entrée Roll du Gyro> 0), lorsque le
pilote ne veut aucun mouvement (le joystick de l'émetteur est en
position centrale) c'est à dire la variable roulis du récepteur
est de 0 ° / sec (Pid_Roll_consigne= 0°) implique que la sortie
roulis du contrôleur PID est positive (Pid_sortie_roll> 0) car
l'erreur????> 0. Donc pour que le quadrotor puisse revient à
l'état stable 0°, la vitesse du moteur avant droit doit augmenter
et ceci est fait en ajoutant la sortie du contrôleur PID Roll
(Pid_sortie_roll) à l'impulsion de l'ESC 1.
Le même principe pour le tangage (Pitch), lorsque le
front du drone est incliné en bas à cause d'une perturbation ou
du vent, le Gyro envoie un angle de tangage négatif et la sortie du
contrôleur PID Pitch devienne négative (Pid_sortie_pitch< 0),
en soustrayant la sortie du PID Pitch de l'impulsion ESC 1 implique que la
vitesse du moteur1 s'augmente et le quadrotor retrouve l'état stable
0°, cela est illustré dans la Figure 3.32 et la
Figure 3.33 pour l'axe de roulis (Roll) et la même chose
pour le tangage (Pitch).
Le même principe se répète pour chaque
combinaison moteur / ESC.
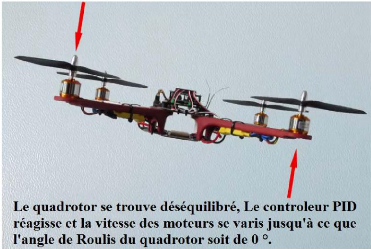
Chapitre III Conception et mise en oeuvre du
fonctionnement
60
Figure 3.32 : L'algorithme du PID conduit le quadrotor
de revenir À l'état voulu en agissant sur les ESCs
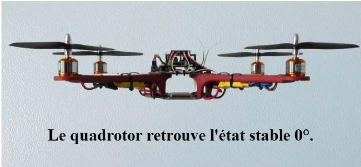
Figure 3.33 : Retour à l'état de consigne
désiré par le pilote 0°.
Selon les dernières instructions citées dans
l'algorithme en haut :
|
Si la sortie PID Pitch est (-) : les impulsions
Si la sortie PID Roll est (-) : les impulsions
Si la sortie PID Yaw est (-) : les impulsions
|
|
|
et
et
et
|
|
|
|
ESC 1
|
ESC 4
|
ESC 2
|
ESC 3
|
|
|
|
|
|
ESC 3
|
ESC 4
|
ESC 1
|
ESC 2
|
|
|
|
|
|
ESC 1
|
ESC 3
|
ESC 2
|
ESC 4
|
|
Chapitre III
|
Conception et mise en oeuvre du
fonctionnement
|
|
Si la sortie PID Pitch est (+) : les impulsions
Si la sortie PID Roll est (+) : les impulsions
Si la sortie PID Yaw est (+) : les impulsions
|
|
|
et
et
et
|
|
|
|
ESC 1
|
ESC 4
|
ESC 2
|
ESC 3
|
|
|
|
|
|
ESC 3
|
ESC 4
|
ESC 1
|
ESC 2
|
|
|
|
|
|
ESC 1
|
ESC 3
|
ESC 2
|
ESC 4
|
L'étape suivante consiste à envoyer les
impulsions calculées aux ESC, ceci est fait en maintien les sorties
numériques du PORTD (D4, D5, D6 et D7) à un niveau logique haut
avec un délai de temps correspond aux largeurs d'impulsions ESC
calculées précédemment. Pour avoir le front descendant des
impulsions, il suffit d'exécuter une boucle « while »
jusqu'à ce que les quatre bits de poids fort du registre PORTD soient
à zéro, ça signifie la fin de l'impulsion ESC.
Pour s'assurer que la fréquence des signaux PWM est de
250 Hz, un temporisateur de boucle vide est employé pour
s'exécuter jusqu'à ce que les 4 ms soient expirées.
Finalement, il en résulte quatre trains d'impulsions PWM
synchronisé avec une fréquence de 250 Hz,
Figure3.34.
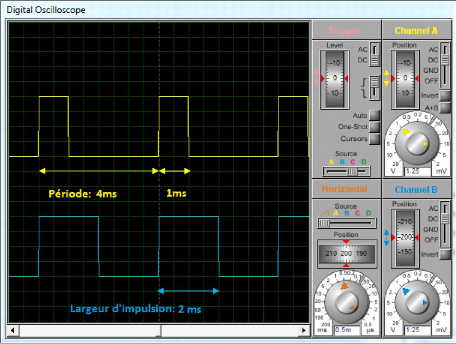
Figure 3.34 : Simulation des impulsions PWM de
fréquence 250 Hz à envoyer pour deux ESCs
61
Chapitre III Conception et mise en oeuvre du
fonctionnement
62
Chapitre III Conception et mise en oeuvre du
fonctionnement
Toutes les données pour contrôler les moteurs sont
disponibles. L'organigramme suivant explique l'algorithme utilisé pour
générer des impulsions PWM aux ESC:
Initialisation des variables flottantes :
Boucle_temps,
timer_ch 1, timer_ch 2,
timer_ch 3, timer_ch 4,
esc_boucle_temps
On attend jusqu'à 4000 us le TIMER microseconde Micros ( )
est utilisé pour
Sont écoulés. Calculer le temps
écoulé.
Micros ( ) - boucle_temps < 4000
Non
Oui
La fréquence du contrôleur de vol est de 250Hz. Cela
signifie que les ESCs ont besoin de leur Impulsions toutes les 4ms.
Stocker le temps actuel du compteur
pour la prochaine boucle
:
Boucle_temps = micros ( )

|
Met à la fois les sorties numériques
D4, D5,
D6 et D7 haut :
PORTD |= B11110000
|
|
Calcule des largeurs d'impulsions à Fournir pour les
ESCs.
Restez dans cette boucle jusqu'à ce que D4, D5, D6 et D7
soient zéro. Non
Oui
Esc_boucle_temps = micros ( )
Stocker le temps actuel du compteur Chaque fois que la boucle
est exécutée.
Si (timer_ch 1 = esc_boucle_temps) PORTD &= Si (timer_ch 2
= esc_boucle_temps) PORTD &= Si (timer_ch 3 = esc_boucle_temps) PORTD
&= Si (timer_ch 4 = esc_boucle_temps) PORTD &=
|
Rendre la sortie numérique
|
|
B11101111
|
|
B11011111
|
|
|
B10111111
|
À zéro pour chaque ESC si
|
|
B01111111
|
Le délai de temps de
|
|
L'impulsion est expirée.
|
Timer_ch 1= esc_1 + Boucle_temps Timer_ch 2=
esc_2 + Boucle_temps Timer_ch 3= esc_3 +
Boucle_temps Timer_ch 4= esc_4 + Boucle_temps
PORTD = 16
Fin de la boucle principale void loop.
63
III.6. Conclusion :
Dans ce chapitre, les étapes de construction du
quadrotor sont strictement illustré, le principe de fonctionnement du
système et les instruments utilisés dans le hardware sont
discutés, passant par la réalisation de l'émetteur et du
récepteur puis le contrôleur de vol. Le software utilisé en
transmission et en réception est présenté avec
détail et les diverses étapes de programme du contrôleur de
vol sont expliquées.
Chapitre 4
Tests et résultats
Chapitre IV Tests et résultats
64
Chapitre IV : Tests et résultats
IV.1. Introduction :
Dans ce chapitre, le but est de donner une description des
différents tests effectués sur le système tels que le test
des angles du Gyro et les signaux de sortie du récepteur RF. Je
présenterai également les techniques utilisées pour
définir les gaines PID adapté à ce quadrotor puis les
résultats obtenus seront utilisés dans le sous-programme de
contrôleur PID, afin d'avoir la stabilité
désirée.

Figure 4.1 : Image du quadrotor
réalisé.
IV.2. Test des signaux du récepteur RF :
Afin d'éviter tous problèmes de
disfonctionnement et pour s'assurer qu'on a une bonne communication radio, il
est donc nécessaire de tester les impulsions reçus par le
récepteur RF du quadrotor.
On commence par alimenter le récepteur RF avec 5v
séparément au circuit du contrôleur de vol, puis on
connecte le canal de sortie Throttle du récepteur au canal CH1 de
l'oscilloscope digital pour visualiser le signal reçue Figure
4.2.
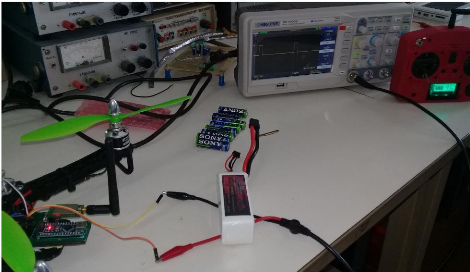
Chapitre IV Tests et
résultats
65
Figure 4.2 : Connexion du récepteur RF à
l'oscilloscope digital.
Le signal PWM qui correspond à la commande Throttle
apparaisse sur l'écran de l'oscilloscope avec une période de
50Hz, Figure 4.3.
Calibre de l'oscilloscope : Tension : 1 Div ? 2
volt Base de temps : 1 Div ? 2.5 ms.
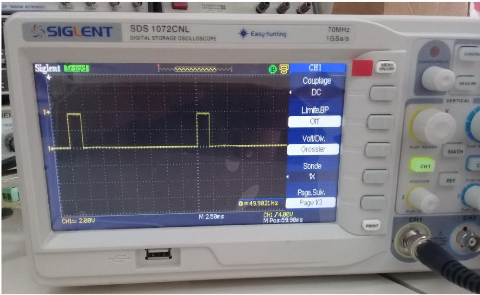
Figure 4.3 : Signal PWM 50Hz de la commande
Throttle.
Chapitre IV Tests et
résultats
66
En agissant sur la position du joystick de la commande
Throttle du transmetteur, on voie bien que la largeur de l'impulsion PWM varie
de 1ms à 2ms, Figure 4.4 et Figure
4.5. La même procédure de test est effectuée pour
les signaux de commande Roll, Pitch et Yaw.
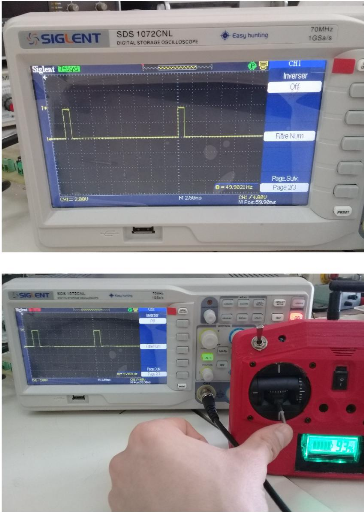
Figure 4.4 : Largeur d'impulsion 1ms.
Figure 4.5 : Largeur d'impulsion 2ms.
Chapitre IV Tests et
résultats
67
IV.3. Test des données angulaires du Gyroscope
:
Nous vérifions les angles de l'IMU pour éviter
les problèmes de commande et les mouvements non désirés,
pour ce faire j'ai introduit l'instruction Serial.print ( ); dans le
sous-programme de lecture des données Gyro MPU6050. Cette instruction
permet d'afficher les angles d'inclinaison du quadrotor en degré pour
les axes Pitch, Roll et Yaw sur le moniteur série de L'Arduino IDE, le
processus est illustré dans la Figure 4.6.
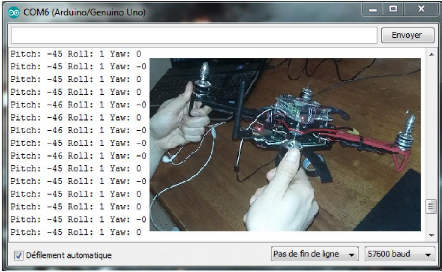
Figure 4.6 : vérification des angles de Gyro sur
l'Arduino IDE.
Le quadrotor est incliné suivent les 3 axes de
mouvement citées en haut. On vérifie si les angles correspondent
au mouvement du quadrotor sont compatible avec la norme mentionné au
Chapitre III page (48) que j'ai utilisée pour ce
contrôleur de vol.
IV.4. Identification des gains PID :
Comme déjà dit dans le chapitre
précédant, les gains K???? ,
K1 et Kd du
contrôleur PID seront déterminées expérimentalement
en agissant sur ces gains d'une manière à stabiliser le quadrotor
pendant le vol et donc une convergence rapide de l'erreur e
vers zéro.
Pour éviter les dégâts et le comportement
indésirable du quadrotor, il est nécessaire de varier les gains
PID avec un ordre correct [19].
C'était une pratique courante de commencer le
réglage avec des valeurs de gain Kd
très faible ou nulle. Mais en revanche, il est
préférable de définir le gain K ????
pour les axes Pitch, Roll et Yaw à "1" et les autres
à zéro, afin de voir comment le quadrotor réagit au
début. Pour ajuster les gains du PID,
Chapitre IV Tests et
résultats
68
on maintient le quadrotor fermement dans la main, puis on
augmente le Throttle jusqu'au moment où le quadrotor commence à
osciller, Figure 4.7.

Figure 4.7 : Réglage des paramètres
PID.
Au début, on fixe le gain ???? ???? de 4 et le gain
???????? de 0.02 pour l'axe de mouvement lacet (Yaw), car cette configuration
de base empêchera le quadrotor de flotter quand nous essayons de le faire
voler, le réglage du gain ???????? pour l'axe de lacet n'est pas
nécessaire parce que le lacet a une traînée des
hélices donc il reste à zéro ???????? = 0.
Pour les deux axes de mouvement Pitch et Roll les gains PID
seront les mêmes. On commence par incrémenter le gain ????????
avec un pas de 3, jusqu'à ce que le quadrotor semble agité. Dans
ce cas j'ai trouvé ???????? = 18. On fixe ???????? à 18 puis on
augmente le gain ???? ???? avec un pas de 0.2 et on continue
l'incrémentation jusqu'à ce que le quadrotor cesse d'osciller.
Après, on diminue le gain ???? ???? de 50% et le résultat devrait
être le gain ???? ???? de base, j'ai trouvé ???? ???? = 1.3.
Enfin, nous commençons à incrémenter le
gain ???????? avec un pas de 0,01 et on continue à augmenter et tester
(chaque fois en introduit le nouveau gain en compilant le code du
contrôleur de vol) jusqu'à ce que le quadrotor commence à
osciller lentement. Quand cela arrive, on diminue le gain ???????? de 50% et le
résultat devrait être le gain ???????? de base, j'ai trouvé
???? ???? = 0.04.
Chapitre IV Tests et
résultats
69
Suivent ces procédure, j'ai réussi à obtenir
une bonne stabilité du quadrotor pendent le vol. Les valeurs des gains
PID du quadrotor pour les 3 axes de mouvement sont représentées
comme suit :
|
·
|
Tangage (Pitch) :
|
K ????
|
=
|
1.3
|
K1 = 0.04
|
Kd = 18
|
|
·
|
Roulis (Roll) :
|
K ????
|
=
|
1.3
|
K1 = 0.04
|
Kd = 18
|
|
·
|
Lacet (Yaw) :
|
K ????
|
=
|
4
|
K1 = 0.02
|
Kd = 0
|
Enfin, ces gains sont introduits dans le programme principal du
contrôleur de vol du quadrotor.
IV.5. Test de vol en zone ouverte:
Une fois que le drone semble assez stable pour voler en toute
sécurité, nous serons capables d'effectué un premier vol
prudent dans un espace ouvert, voici quelque photos du premier vol
effectué dans l'USTHB Figure4.8.

Figure 4.8 : Test de vol dans un espace
ouvert.
Chapitre IV Tests et
résultats
70
IV.6. Conclusion :
Dans ce chapitre, les tests effectués sur le
système ont été décrits à l'étape.
Les gains PID ont été déterminés
expérimentalement et la stabilité a été atteinte.
Les tests de communication radio et d'orientation du quadrotor ont
été menés. Les résultats obtenus sont bonnes.
71
Conclusion générale
Le développement des véhicules aériens
sans pilote a connu une croissance rapide ces dernières années
grâce aux progrès de la technologie des capteurs et actionneurs
miniatures. Ces progrès ont également entraîné la
production de composants et de systèmes embarqués qui
représentent les outils de base pour les robots volants et la mise en
oeuvre de l'intelligence artificielle, d'où l'avantage d'effectuer et de
couvrir un large éventail de missions. Dans ce contexte, le travail
effectué dans le cadre de ce projet consiste à réaliser un
drone de type quadrotor avec une radiocommande à six canaux de
transmission.
Durant cette étude, j'ai mentionné tous les
étapes pour la mise en oeuvre de ce système, après une
bref introduction sur les drones, avec la citation des différents normes
et travaux de recherche effectués dans ce domaine, j'ai entamé
à la modélisation dynamique du quadrotor, Ensuite, j'ai
présenté le principe de fonctionnement des différentes
parties du système à travers l'instrumentation qu'il contient le
quadrotor et l'unité de la radiocommande avec l'illustration des
diagrammes et des figures nécessaires. En ce qui concerne la partie
software, j'ai d'abord expliqué les algorithmes utilisés dans
l'émetteur et le récepteur RF afin d'avoir une réaction
adéquate du quadrotor aux commandes envoyées par le pilote.
Après ça, j'ai donné une explication
détaillée sur les diverses étapes qui contient le
programme principale du contrôleur de vol tels que:
La lecture des signaux PWM venants du récepteur.
La lecture des données angulaire venant du Gyroscope.
Le calcul des corrections PID.
Le calcul des impulsions pour chaque ESC.
L'envoie des impulsions calculées aux ESC.
Enfin, les résultats des essais effectués sur les
différentes parties du système ont montré une
grande efficacité vis-à-vis des défauts,
notamment en ce qui concerne le contrôleur PID qui préserve les
performances du quadrotor ainsi que sa stabilité pendant la
perturbation. Le seul problème que j'ai remarqué est que le
quadrotor glisse un peu en vol stationnaire, ça arrive sur le quadrotor
car le moteur tourne, les vibrations qui sont encore présentes sont de
petites accélérations qui vont rendre
l'accélération du drone un peu fiable. Donc, ce problème
sera résolu avec l'utilisation des données de
l'accéléromètre de l'MPU6050. Mais malheureusement, le
temps ne me suffit pas pour apporter de telles améliorations à
l'algorithme du contrôleur de vol. Enfin, ce projet ma permet de
découvrir l'environnement des robots volant aériennes et il me
permet d'amélioré mes capacités en programmation.
Références et Bibliographie
Références
bibliographiques
Références Bibliographiques
> [1] A. Tayebi, and S. Mcgilvray «Attitude
stabilisation of a four rotor aerial robot», Proceedings of the 43rd IEEE
Conference on Decision and Control, Atlantis, Paradise Island, Bahamas,
December 2004.
> [2] A. Tayebi, and S McGilvray «Attitude
stabilisation of a VTOL Quadrotor Aircaft», IEEE Transactions on Control
Systems Technology, Vol. 14, No. 3, pp. 562-571, May 2006.
> [3] L. Gautier, B. Hamilton, J. Hazebrouck, and T.
Tourrette «Pilotage d'un quadri-rotor via un FPGA»,
Tuteur ESIEE engineering, Journées pédagogiques, 2008.
> [4] L. Besnard «Control of à quadrotor
vehicle using sliding mode disturbance observer», Master Thesis, Alabama
university, 2006.
> [5] H. Bouadi, M. Bouchoucha, and M. Tadjine
«Sliding Mode Control Based on Backstepping Approach for an UAV
Type-Quadrotor», International Journal of Applied Mathematics and Computer
Sciences, Barcelona, Spain, Vol. 4, No. 1, pp. 12-17, 2007.
> [6] H. Bouadi, M. Bouchoucha, and M. Tadjine
«Modelling and Stabilizing Control Laws Design Based on Backstepping for
an UAV Type-Quadrotor» Proceeding of 6 th IFAC Symposium on IAV, Toulouse,
France ,2007.
> [7] H. Bouadi, M. Bouchoucha, and M. Tadjine
«Modelling and Stabilizing Control Laws Design Based on Sliding Mode for
an UAV Type-Quadrotor» Engineering Letters, London, England, Vol. 15, No.
2, pp. 15-24, 2007.
> [8] H. Bouadi, and M. Tadjine «Nonlinear observer
design and sliding mode control for four rotors helicopter» Proceedings of
World Academy of Science, Engineering and Technology, Venise, Italy, Vol. 25,
pp. 225-230, 2007.
> [9]
http://drone-zone.e-monsite.com/pages/les-differents-types-de-drones.html
> [10] All the World's Rotorcraft - the biggest helicopter
collection in the world, more than 700 helicoptersand autogyros.
> [11]
http://www.geekmag.fr
/quadricoptere-fonctionnement-configuration-et-pilotage-rc/
> [12] Conférence Mieux connaître les drones
Avant-propos - Onera
> [13] Inertial Measurement Unit - Browse Our Vast
Inventory -
vectornav.com
> [14]
https://www.mondrone.net/fabriquer-quadricoptere-la-propulsion/
> [15] https://www.thingiverse.com/
Références
bibliographiques
? [16] Henri Bourlès, Systèmes linéaires -
De la modélisation à la commande, Hermes Science Puplishing,
2006, 510 p. (ISBN 2746213001).
? [17] Henri Bourlès et Hervé Guillard, Commande
des systèmes. Performance et robustesse, Ellipses, 2012 (ISBN
2729875352).
? [18]
http://www.machinedesign.com/sensors/introduction-pid-control
? [19]
https://myfirstdrone.com/blog/how-to-tune-a-quadcopter
? [20] https://github.com/
Annexe
Annexe
1. Carcasse Auto CAD :
Voici quelques photos correspondant aux fichiers source
conçus avec le logiciel Auto CAD puis imprimés par une fraiseuse
numérique. Cette carcasse de plexiglass transparente est mise sur la
molette exacte pour protéger l'Arduino Uno du contrôleur de
vol.
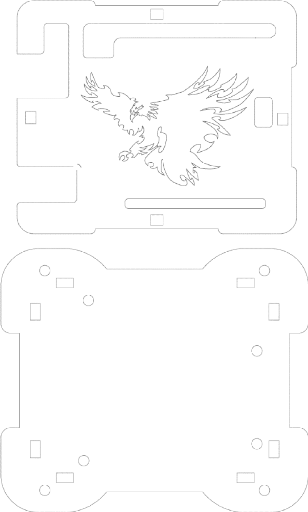
Annexe
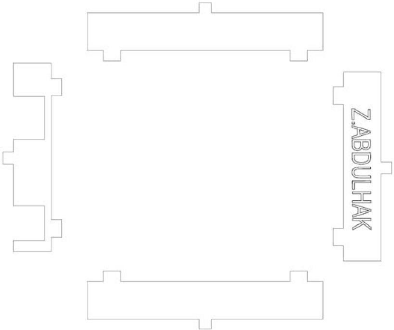
2. Caractéristiques du moteur brushless
utilisé :
La description:
Nom de marque: emax
Nom de l'article: moteur brushless de xa2212
Kv: 1400kv
Diamètre: 3mm
Diamètre de l'arbre: 28.5mm
Compatible taille d'hélices:
1147.1047.9060.8040.8060
kv1400: propice pour les avions de FPV poussoir prop, ailes
à grande vitesse
Annexe
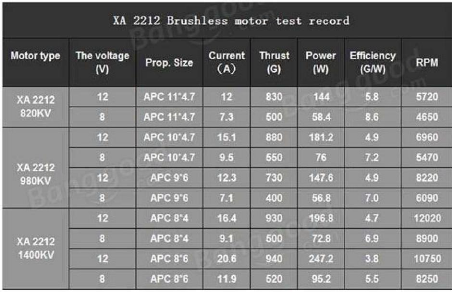
Diamètre du moteur :
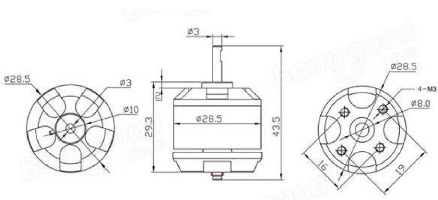
Annexe
3. Caractéristiques de l'ESC Hobbywing XRotor 20A
OPTO :
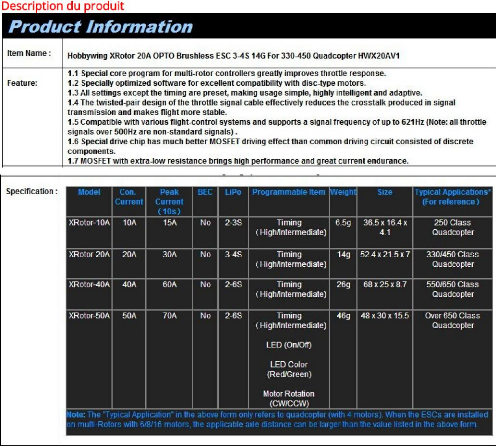
ÉÕ?ÎÑ
ÑÇÚÔÊÓÇ
ÉÒÌæ
É?äæÑÊßáÅ
ÊÇäæßã
ãÇÏÎÊÓÇÈ
ÑÕáÇ äã ÚÏáÇ
É?ÚÇÈÑ ÑÇ?Ø
äæÏÈ æ ÑÇ?Ø
äæÏÈ ÉÑÆÇØ
ÁÇÔäÇ æ
áãÚáÇ ÇÐ äã
ÏáÇ äÇß
:ÕÎáã
ÉßÑÍ ??
ãßÍÊáÇ äã
äßãÊáá
ÒÊÑÇÛ?Ì 2.4
ÊÇÈÐÈÐ ??? áãÚÊ
Éäã?Ç
É?ßáÓ?áÇ
Ê?ÇÕÊ?á æ?ÏÇÑ
ÉÏÍææ ÑæÇÍã
Ë?Ë æÐ ÈæßÓæ
Ñ?Ì æä?æÏÑ?Ç
áËã äãËáÇ
|
?? íæ?ÏÇÑáÇ
|
ãßÍÊáÇ
ÉÏÍæ äã
|
?????? ÁÇÒÌ
ÌÐæãä
|
ã?ãÕÊ
|
??
|
ÊÏÈæ
ãÇÙäáÇ ÇÐ
|
Ð?äÊ áÍÇÑã
|
???? ÊÍÖæ
ÉÑøßÐãáÇ åÐ ??
.ãáß
|
2 íáÇæÍ
ÏÚÈ äÚ
ÉÑÆÇØáÇ
|
|
ÏÑ
ÉÑÆÇØáá
|
äæß? ???
íæ?ÏÇÑáÇ
áÇÈÞÊÓ?Çæ
áÇÓÑ?Ç
|
??
|
ÉãÏÎÊÓãáÇ
|
ÊÇ?ãÒÑÇæÎáÇ
|
ÊÍÑÔ
|
ÉÌãÑÈáÇ
ÁÒÌá ???????
|
Çã
|
.ÉãÒ?áÇ
|
áÇßÔ?Çæ
|
É?äÇ?ÈáÇ
ãæÓÑáÇ
Í?ÖæÊ
|
|
ÌãÇäÑÈáÇ
|
???
|
íæÊÍÊ
|
íÊáÇ
|
ÊÇæØÎáá
|
????
|
ÇÍÑÔ
|
Ê?ØÚ
|
ßáÐ
|
ÏÚÈ
ÑÇ?ØáÇ ÑØ äã
ãÏÎÊÓãáÇ
æ?ÏÇ øÑáÇ
ãßÍÊã äã
ÉÑÏÇÕáÇ
ÑãÇæ?Ç äã
|
ÈÓÇäã
|
áÚ
|
ÈæßÓÑ?ÌáÇ
äã ÉÑÆÇØáÇ
ÇÑÍäÇ Ç?ÇæÒ
ÊÇäÇ?È ÉÁÇÑÞ
Þ?ÑØ äÚ
ÉÑÆÇØáÇ
ÇÑÍäÇ Í?ÍÕÊæ
ÈÇÓÍ áËã
ÉÑÆÇØáÇ
ÉáÍÑ ??
ãßÍÊáá
É?Ó?ÆÑáÇ
ÊÇø?ãÒÑÇæÎáÇæ
.ÉáÍÑáÇ
ÉÁÇß ???
áæÕÍáÇæ
ÉÑÆÇØáÇ
ÚÖæãÊ ÁÇØÎ ??????
íæ?ÏÇÑáÇ
ãßÍÊãáÇ
ÑãÇæ ÊÇäÇ?ÈÈ
ÇÊäÑÇÞãæ
Abstract: This work was carried out as part
of the master's thesis, which the objective was the design and production of a
quadrotor UAV drone with the six-channel radio controller, using only
inexpensive electronic components such as the Arduino, a 3-axis gyroscope
MPU6050 and a radio module (NRF24L01) at 2.4 GHz for the realization of the
appropriate transmitter and RF receiver. The Both of quadrotor and transmitter
frames were built with ultra polyamide nylon using a 3D printer. In this
thesis, I mentioned all the stages of the implementation of this system, after
a brief introduction on drones, with the citation of the different standards
and research work carried out in this area, I started to model the different
parts of the system through the instrumentation it contains the quadrotor and
the radio control unit with the illustration of the diagrams and figures
required. Regarding the programming part, I first explained the algorithms used
in the RF transmitter and receiver in order to have an adequate reaction from
the quadrotor to the commands sent by the pilot. After that, I gave a detailed
explanation on the different stages which contains the main program of the
flight controller such as: Reading the PWM signals coming from the receiver,
Reading the angular data coming from the Gyroscope, Calculating the PID
corrections, Calculates pulses for each ESC and sends calculated pulses to the
ESCs.
Résumé: Ce travail a
été réalisé dans le cadre de la thèse de
maîtrise, dont l'objectif était la conception et la production
d'un drone quadrotor UAV avec le contrôleur radio à six canaux, en
utilisant uniquement des composants électroniques bon marché tels
que l'Arduino, un gyroscope 3 axes MPU6050 et un module radio (NRF24L01)
à 2,4 GHz pour la réalisation de l'émetteur et du
récepteur RF appropriés. Les deux cadres du quadrotor et de
l'émetteur ont été construits en nylon ultra polyamide
à l'aide d'une imprimante 3D. Dans cette thèse, j'ai
évoqué toutes les étapes de la mise en oeuvre de ce
système, après une brève introduction sur les drones, avec
la citation des différentes normes et travaux de recherche menés
dans ce domaine, j'ai commencé à modéliser les
différentes parties du système à travers l'instrumentation
contient le quadrotor et la radiocommande avec l'illustration des
schémas et figures nécessaires. Concernant la partie
programmation, j'ai d'abord expliqué les algorithmes utilisés
dans l'émetteur et le récepteur RF afin d'avoir une
réaction adéquate du quadrotor aux commandes envoyées par
le pilote. Après cela, j'ai donné une explication
détaillée sur les différentes étapes qui
contiennent le programme principal du contrôleur de vol telles que:
lecture des signaux PWM provenant du récepteur, lecture des
données angulaires provenant du gyroscope, calcul des corrections PID,
calcul des impulsions pour chaque ESC et envoie des impulsions calculées
aux ESC.
Zusammenfassung: Diese Arbeit wurde im Rahmen
der Masterarbeit durchgeführt, deren Ziel das Design und die Produktion
einer Quadrotor-UAV-Drohne mit dem Sechs-Kanal-Funkcontroller war, wobei nur
kostengünstige elektronische Komponenten wie das Arduino, ein
3-Achsen-Gyroskop MPU6050 und verwendet wurden ein Funkmodul (NRF24L01) mit 2,4
GHz zur Realisierung des entsprechenden Senders und HF-Empfängers. Die
Quadrotor- und Senderrahmen wurden unter Verwendung eines 3D-Druckers aus
Ultra-Polyamid-Nylon hergestellt. In dieser Arbeit erwähnte ich alle
Phasen der Implementierung dieses Systems. Nach einer kurzen Einführung in
Drohnen und unter Berufung auf die verschiedenen Standards und
Forschungsarbeiten in diesem Bereich begann ich, die verschiedenen Teile des
Systems zu modellieren Die Instrumentierung enthält den Quadrotor und die
Funksteuereinheit mit der Abbildung der erforderlichen Diagramme und
Abbildungen. In Bezug auf den Programmierteil habe ich zunächst die im
HF-Sender und -Empfänger verwendeten Algorithmen erläutert, um eine
angemessene Reaktion des Quadrotors auf die vom Piloten gesendeten Befehle zu
erzielen. Danach gab ich eine detaillierte Erklärung zu den verschiedenen
Stufen, die das Hauptprogramm des Flugreglers enthalten, wie zum Beispiel:
Lesen der vom Empfänger kommenden PWM-Signale, Lesen der vom Gyroskop
kommenden Winkeldaten, Berechnen der PID-Korrekturen, Berechnen von Impulsen
für jeder ESC und sendet berechnete Impulse an die ESCs.
Özet: Bu çaliþma, sadece
Arduino, 3 eksenli bir jiroskop MPU6050 gibi ucuz elektronik bileþenler
kullanilarak, alti kanalli radyo kontrolörü ile bir quadrotor HA
uçaðinin tasarimi ve üretimi olan yüksek lisans tezinin
bir parçasi olarak gerçekle°tirildi. uygun verici ve RF
alicisinin gerçekle°tirilmesi için 2,4 GHz'de bir radyo
modülü (NRF24L01). Dörtlü ve verici
çerçevelerinin her ikisi de bir 3D yazici kullanilarak ultra
poliamid naylon ile yapilmi°tir. Bu tezde, bu sistemin uygulanmasinin tüm
a°amalarindan bahsetmi°tim, dronlar üzerine kisa bir giri°ten sonra, bu
alanda yapilan farkli standartlarin ve ara°tirma çali°malarinin
gösterilmesi ile sistemin farkli bölümlerini modellemeye
ba°ladim. enstrümantasyonda gerekli diyagramlari ve °ekilleri
gösteren dörtlü ve radyo kontrol ünitesini içerir.
Programlama kismi ile ilgili olarak, önce kuadrotordan pilot tarafindan
gönderilen komutlara yeterli bir tepki vermek için RF vericisi ve
alicisinda kullanilan algoritmalari açikladim. Bundan sonra, uçu°
kontrolörünün ana programini içeren farkli a°amalarda
ayrintili bir açiklama yaptim: Alicidan gelen PWM sinyallerinin
okunmasi, Jiroskoptan gelen açisal verilerin okunmasi, PID
düzeltmelerinin hesaplanmasi, her ESC ve hesaplanan darbeleri ESC'lere
gönderir.
| 

