Chapitre I
Généralités sur les
systèmes
embarqués

Chapitre I
généralités sur les systèmes
embarqués
I.1. DEFINITIONS :
Définition 1 :
Les systèmes électroniques sont de plus en plus
présents dans la vie courante. Les ordinateurs et micro-ordinateurs sont
des systèmes électroniques bien connus. Mais
l'électronique se trouve maintenant embarquée dans de très
nombreux objets usuels : les téléphones, les agendas
électroniques, les voitures. Ce sont ces systèmes
électroniques enfouis dans les objets usuels qui sont appelés
systèmes embarqués.
Définition 2 :
« Embedded system » tout système conçu
pour résoudre un problème ou une tache spécifique mais
n'est pas un ordinateur d'usage général.
-Utilisent généralement un microprocesseur
combiné avec d'autres matériels et logiciel pour résoudre
un problème de calcul spécifique.
-Système électronique et informatique autonome ne
possédant pas des entrées-sorties standards.
-le système matériel et l'application sont
intimement liés et noyés dans le matériel et ne sont
discernables comme dans un environnement de travail classique de type PC.
Définition 3 :
N'est pas visible en tant que tel, mais est
intégré dans un équipement doté d'une autre
fonction ; ou dit aussi que le système est enfoui, ce qui traduit plus
fidèlement le terme anglais « Embedded ».
-Une faible barrière existe entre les systèmes
embarqués et les systèmes temps réel (un logiciel
embarqué n'a pas forcément de contraintes temps réel).
-La conception des ces systèmes est fiable (avions,
système de freinage ABS) à cause de leur utilisations dans des
domaines à fortes contraintes mais également parce que
l'accès au logiciel est souvent difficile une fois le système
fabriqué.
Définition 4 :
Les microprocesseurs s'étendent depuis de simples
microcontrôleurs 8bits aux 64bit le plus rapidement et les plus
sophistiqués.
-le logiciel système inclus s'étend d'un petit
directeur à un grand logiciel d'exploitation en temps réel (RTOS)
avec une interface utilisateur graphique (GUI). Typiquement, le logiciel
système inclus doit répondre aux événements d'une
manière déterministe et devrait toujours être
opérationnel.
Les systèmes embarqués couvrent aussi bien les
commandes de navigation et de commande de trafic aérien qu'un simple
agenda électronique de poche.

I.2. HISTORIQUE :
La plupart des machines qui nous simplifient la vie ont besoin
d'un système de régulation ou de contrôle pour fonctionner
de manière correcte.
Ces systèmes de contrôle existent depuis bien avant
l'invention des ordinateurs. Exemple :
Pour maintenir une locomotive à vapeur à une
vitesse constante, on a besoin d'un système qui régule la
quantité de vapeur envoyée dans les pistons.
Si la locomotive ralentit (pente montante...) il faut injecter
plus de vapeur, si la locomotive accélère, il faut injecter moins
de vapeur On aimerait que cette tâche se fasse de façon
«automatique», c'est-à dire avec un minimum d'intervention de
l'être humain.
Solution : le gouverneur à force centrifuge

valve valve
d'admission d'adminission
de vapeur de vapeur
axe relié aux roues rotation rapide
fermeture
Figure a : Système de régulation de
quantité de vapeur
Ces systèmes de contrôle peuvent donc être
réalisés de manière forte simple. Avec le
développement de la technologie, on a opté pour des
systèmes basés sur l'électronique.
Parallèlement à ce développement des
systèmes de contrôle, les systèmes informatiques se sont
développés. Ceux-ci sont vite sortis du cadre des «machines
de bureau» ou de «machine à calculer» dans lequel ils
avaient initialement été développés, (Ordinateur =
machine à traiter l'information).
Il est donc naturel d'utiliser les possibilités de
calcul de l'ordinateur comme composant d'un système plus large. Pour
remplacer un système de régulation analogique, et pour
réaliser un traitement qui serait trop complexe / impossible en
analogique...
Les Avantages:
· plus grande flexibilité des systèmes
informatiques.
· On peut modifier le programme.
· On peut réutiliser plus facilement ce qui existe
déjà.
· plus de puissance de calcul.
· plus compact.
Sys. Contrôle Informatique
Systèmes embarqués

Un des premiers exemples de système embarqué
date du début des années 1960. Il s'agit de l'ordinateur de bord
des vaisseaux spatiaux du programme Apollo, qui a amené N. Armstrong sur
la lune. Cet ordinateur contrôlait en temps réel les
paramètres de vol et adaptait la trajectoire. Il fonctionnait en mode
interactif.
|
Interface utilisateur
Pas de CPU: plus de 4000 circuits intégrés
contenant chacun 3 portes NOR 32 Ko de RAM
72 Ko de ROM 2MHz
Programme en assembleur (11 instructions)
|
Figure b : Le premier système
embarqué
Le premier système embarqué qui a
été produit en série est vraisemblablement le D-17
d'Autonetics. Il servait de système de contrôle aux missiles
nucléaires américains LGM-30 Minuteman, produit à partir
de 1962.
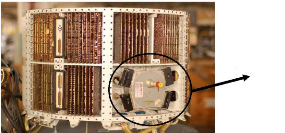
Disque dur
Figure c : Le système de contrôle aux
LGM-30 Minuteman Le disque était utilisé comme
mémoire primaire !
Depuis les systèmes se sont diversifiés, ils ont
permis l'explosion du marché des «consumer
electronics» où tout est (devenu) numérique (GSM,
électroménager, MP3s, etc.). Ils sont également bien
présents dans le domaine industriel pour Contrôle de processus de
production, etc.
La convergence entre les applications électroniques
pour grand public et les ordinateurs est de plus en plus grande : La console de
jeu XBox de Microsoft n'est qu'un PC «emballé» sous la forme
d'une console. Il est de plus en facile de transformer son PC de bureau en
«media center» qui remplace la chaîne hi-fi et le
lecteur DVD...
Brève histoire des systèmes
embarqués :
1967 : Apollo Guidance Computer, premier système
embarqué. Environ un millier de circuits intégrés
identiques (portes NAND).
1960-1970 : Missile Minuteman, guidé par des circuits
intégrés.
1971 : Intel produit le 4004, premier microprocesseur, à
la demande de Busicom. Premier circuit générique, personnalisable
par logiciel.

Chapitre I généralités sur les
systèmes embarqués
1972 : lancement de l'Intel 8008, premier microprocesseur 8 bits
(48 instructions, 800kHz).
1974 : lancement du 8080, premier microprocesseur largement
diffusé. 8 bits, (64KB d'espace adressable, 2MHz - 3MHz).
1978 : création du Z80, processeur 8 bits.
1979 : création du MC68000, processeur 16/32 bits.
I.3.Classes des systèmes embarqués
: > Calcul normal (limite de
matériels) - Application similaire à une
application de bureau mais empaquetée dans un système
embarqué.
- Les jeux de vidéo, set- top box, et TV Box. >
Les systèmes de contrôle
- Contrôle de systèmes en Temps Réel.
- Moteur d'automobile, traitement chimique, traitement
nucléaire, système de navigation aérien.
> Traitement de signal
- Calcul sur de grosses quantités de données.
- Le radar et sonar, le dispositif de compression
vidéo.
> Télécommunications &
Réseau
- Transmission d'information et commutation. -
Téléphone portable, Dispositifs de l'Internet.
| 

