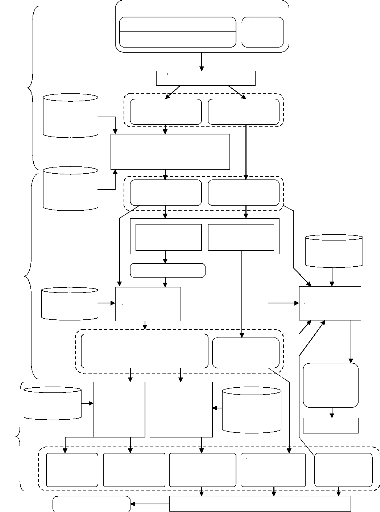
II.6.2. Architecture détaillée du flot :
Ce flot global est présenté sur la figure II.10.
Il part d'une spécification architecturale et comportementale du
système à concevoir. La description est alors raffinée de
niveaux d'abstraction en niveaux d'abstraction. En sortie, nous obtenons le
code logiciel et matériel réalisant l'application.
II.6.2.1. L'entrée du flot au niveau fonctionnel
:
En entrée du flot, nous prenons une description dans le
langage systemC. Ce langage permet de décrire la structure et le
comportement d'un système logiciel et matériel. Il est
basé sur le langage C++ étendu avec des bibliothèques
permettant la modélisation et la simulation de systèmes
logiciels/matériels globalement synchrones, ou asynchrones avec un
modèle à événements proches de celui du VHDL.
Cette description peut être effectuée au niveau
fonctionnel ou aux niveaux inférieurs. Il est aussi possible de combiner
les niveaux. Elle donne les informations sur la structure, et
éventuellement le comportement. Si certains composants sont fournis sans
comportement, ils sont considérés comme des boîtes
noires.
Cependant il était préférable que nous
possédions l'entière maîtrise du flot et donc qu'il ne
dépende pas d'un langage d'entrée externe à notre groupe.
C'est pourquoi la première étape du flot consiste à
convertir la description system C en une description Colif.
REMARQUE :
Lorsqu'un module représente un processeur, nous
considérons qu'il est accompagné par une mémoire locale
dans laquelle sont stockés le code et les données locales du
logiciel que le processeur doit exécuter. Tout au long de ce travail,
dès que nous parlerons de processeur, nous supposerons implicitement
l'existence de cette mémoire locale. Dans le cas où le processeur
est un microcontrôleur, les périphériques
intégrés seront eux aussi encapsulés dans l'enveloppe
représentant le processeur. La figure II.9 montre l'architecture
représentée par un module processeur.
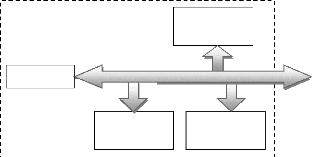
Processeur
Périphérique
local
Bus du processeur
Mémoire
local
Périphérique
local
Figure II.9. Un module processeur

Niveau micro-architecture
Niveau fonctionnel
Niveau macroarchitecture
Bibliothèque
d'interfaces
Bibliothèque
de mémoire
Code des interfaces matérielles
Bibliothèque
de
modèles
mémoire
Bibliothèque
de
commun-
ication
Système monopuce
Architecture Colif annotée
macro-
architecture avec mémoire
Génération
d'interfaces
matérielles
Architecture Colif micro-architecture
Allocation mémoire globales
SystemC annoté
Génération
d'architecture
mémoire
Description du comportement
Description de l'architecture
Architecture Colif
fonctionnelle
Architecture Colif
macroarchitecture
Table d'allocations
Affectations
mémoire
Génération
de
systèmes
d'exploitation
(interfaces
logicielles)
Traduction vers Colif
Code systèmes
d'exploitation
raffinement : synthèse de
communication
Optimisations
d'accès
mémoire
Comportement
(ex. C++)
Comportement
(ex. C++)
Comportement
optimisé
Compilation / Synthèse
Bibliothèque
de
système
d'exploitation
Comportement optimisé
Boites
noires
Génération
d'architecture
mémoire
Description
multilangage
multiniveau
simulable
Cosimulation
Bibliothèque
de simulation
Composants
existants
Figure II.10 : Le flot de conception
générale pour les systèmes monopuces

Chapitre II conception des logiciels embarqués
| 

