?nalyse en composantes principales
Sommaire
2.1 Introduction à l'ACP 8
2.2 Identification du modèle ACP
9
2.3 Estimation des paramètres du modèle
ACP 10
2.4 Détermination de la structure du
modèle 14
2.5 Détection et localisation de défauts
18
2.1 Introduction à l'ACP
L'analyse en composantes principales (ACP) est une
méthode mathématique d'analyse graphique de données qui
consiste à rechercher et mettre en évidence les relations qui
existent entre les variables, sans tenir compte, à priori d'une
quelconque structure, et élabore un modèle du système
à partir de données prélevées sur ce dernier L'ACP
élabore un modèle du système à partir de
données prélevées sur ce dernier.
L'identification du modèle repose sur deux
étapes : la première consiste à estimer ses
paramètres alors que la seconde consiste à déterminer sa
structure.
Une fois le modèle ACP identifié, des
résidus peuvent être générés en comparant le
comportement observéà celui donnépar le modèle ACP
de référence, Ces résidus permettent de détecter
puis de localiser l'ensemble des variable en défaut.
Le but de l'ACP est donc de trouver un ensemble de facteurs
(composantes) qui ait une dimension inférieure à celle de
l'ensemble original de données et qui puisse décrire correctement
les tendances principales.
Ce chapitre concernera la présentation et le
développement des différentes procédures de diagnostics
à base d'ACP en termes de traitement de données recueillies, et
détection et de localisation de défauts capteurs.
Identification du modèle ACP Analyse en composantes
principales
9
2.2 Identification du modèle ACP
L'identification du modèle ACP débute par la
construction d'une matrice contenant l'ensemble des données disponibles
sans distinction entre les entrés et les sorties du système.
Ces données sont supposées être recueillies
sur un système statique en fonctionnement normal (données
saines).
Au départ on aura des données recueillies sur
différents capteurs x1 xm :
Notre matrice de données Xd ?
[N×m]
formée par la concaténation des vecteurs xi(K)
obtenus à différents instants est :
Xd (k) = [x1(K)T x2(K)T ... ...
xm(K)T
Où: i [1 : m]
N étant le nombre de mesure ou itération (k) m est
le nombre de capteurs ( variables ) Ce qui donnera la Matrice de données
suivante :
|
x1 (1) ? x1 (2)
Xd = ???????
.
x1 (N)
|
x2 (1) .
x2 (2) .
.
x2 (N) .
|
. . xm (1)
. . xm (2) ?
???????
.
. . xm (N)
|
Généralement les données sont
exprimées par des unités et des échelles
différentes. Pour cela on centre les données en premier lieu.
Puis afin de rendre les résultats indépendants des unités
utilisées pour les différentes variables, on réduit ces
dernières par rapport a leur variance respective. Les données
ainsi obtenues sont centrées et réduites, elles sont de moyenne
nulle et de variance unité.
Chaque colonne Xj de la nouvelle matrice de donnée
centré-réduite est donnée par :
Où: Mj = La moyenne de tout les prélèvements
[1 : N] de la colonne j ój = écart type ( qui est égale
à la racine carrée de la variance)
Xd j - Mj pour le centrage de nos données,
qu'on divise par la suite sur ój pour la réduction.
La moyenne est donnée par :
Identification du modèle ACP Analyse en composantes
principales
La variance est donnée par :
|
XN
ó2 j = 1
N
k=1
|
(xj (k) -
Mj)2
|
10
La nouvelle matrice des données normalisées est
donnée par :
X = ( X1 ...
Xm)
La matrice de corrélation est donnée par :
l'effet du centrage et de réduction d'une distribution
de données est illustrépar la Figure ci-dessous :
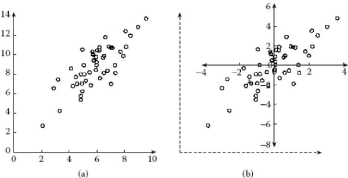
Figure 2.1 - Déroulement D'une analyse en composantes
principales.(a) Distribution
d'entrée.(b) Centrage et
réduction de cette distribution
| 

