CONCLUSION GENERALE
Après modélisation et simulation, la boucle
ouverte, les boucles fermées compensée et non sont
représentées ci-dessous :
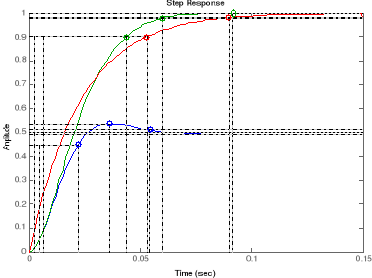
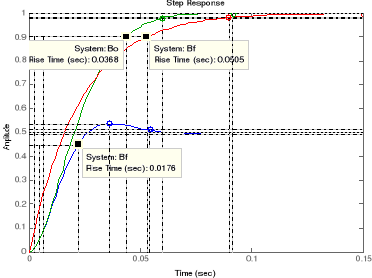
Temps de montée (Rise time) de 10 à 90 %
Temps de réponse (Setting times) ou temps
d'établissement du régime stationnaire à 2%
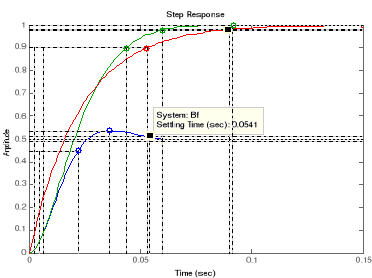
Tableau récapitulatif.
>> num=0.998;
>> den=[0.0001623 0.02293 1];
>> Bo=tf(num,den);
>> sys1=feedback(Bo,1)
Transfer function:
0.998
---------------------------------
0.0001623 s^2 + 0.02293 s + 1.998
>> num2=[0.0001623 0.02293 1];
>> den2=[0.02293 0];
>> corr=tf(num2,den2)
Transfer function:
0.0001623 s^2 + 0.02293 s + 1
-----------------------------
0.02293 s
>> sys=corr*sys1
Transfer function:
0.000162 s^2 + 0.02288 s + 0.998
------------------------------------------
3.722e-006 s^3 + 0.0005258 s^2 + 0.04581 s
>> syscomp=feedback(sys,1)
Transfer function:
0.000162 s^2 + 0.02288 s + 0.998
-------------------------------------------------
3.722e-006 s^3 + 0.0006878 s^2 + 0.0687 s +
0.998
Etude comparative de performances
|
Système
|
Fonction de transfert
|
Pôles, zéro et gain
|
Régime
|
Rapidité
|
Dépas %
|
Précision
Ecart de position
|
|
Tm 0 à 90 %
|
Tr 2%
|
|
BO
|
0.998
------------------------------------------
0.0001623 s^2 + 0.02293 s + 1
|
-70.6500 #177; 34.1991i
Pas de zéro
6149.1066
|
Oscillatoire
|
0.0368
|
0.0599
|
0.153
|
0%
|
|
BF
|
0.998
-----------------------------------------------
0.0001623 s^2 + 0.02293 s + 1.998
|
-70.6408#177;85.5594i
Pas de zéro.
6149.1066
|
oscillatoire
|
0.0176
|
0.0541
|
7.45
|
50%
|
|
BF C
|
0.000162 s^2 + 0.02288 s + 0.998
----------------------------------------------------------------------
3.722e-006 s^3 + 0.0006878 s^2 + 0.0687 s + 0.998
|
-70.6500 #177;34.1991i
-70.6500 #177;34.1991i et -17.2200
43.5238
|
non oscillatoire
|
0.0505
|
0.0899
|
Non
|
0%
|
BIBLIOGRAPHIE
I. OUVRAGES
Brian D. Hahn and Daniel T. Valentine, Essential MATLAB®
for Engineers and Scientists,Third edition,2007.
Catalog, "Transfer Function For MOOG Servovalves", MOOG
Technical Bulletin 103, MOOG Inc. Controls Division, East Aurora, Ny
14052.
G. Rabie and M. Lebrun, "Modélisation par Les Graphes
à Liens et Simulation d'une Servovalve Electrohydraulique à Deux
Etages", R.A.I.R.O Automatique Systems Analysis and Control, vol. 15,
n°2, 1981.
Y. Tchouprakov, Commande Hydraulique et Automatismes
Hydrauliques. Moscou, Ed. Mir, 1979.
Jacques Veaux, Les trains d'atterrissage et les systèmes
associés, Edité par le Centre des hautes études de
l'armement Division Histoire de l'armement, 2006.
II. SUPPORTS DE COURS
J.Baillou, J.P.Chemla, B. Gasnier, M.Lethiecq, Cours de
Systèmes Asservis, Polytech'Tours, 2009.
Lionel PREVOST, cours de l'initiation à Matlab,
Université Pierre et Marie Curie, Paris, 2008.
Prof. Michel ETIQUE, cours Régulation automatique,
Ecole d'Ingénierie et de Gestion du canton de Vaud, Suisse, 2007.
III. THESES PUBLIEES
Batoul ATTAR, Modélisation réaliste en conditions
extrêmes des servovalves électrohydrauliques utilisées pour
le guidage et la navire aéronautique et spatiale, Thèse de
Doctorant 2008,INSA de Toulouse, n°ordre 919.
J.-C. Maré, "Mémoire de Doctorat d'état,
Contribution à la Modelisation, la Simulation, l'Identification et la
Commande d'Actionneurs Electrohydrauliques". Lyon, Université Claude
Bernard- Lyon I, 1993.
IV. SITES INTERNET
http://www.aviation-fr.com
http://www.gs2i.fr/fineprint/pdffactory.htm
http://www.google.com/constitution_des_freins.htm
http://www.wikipedia/corrige-UPSTI-2007/ccp-mp.htm
http://www.aero-hesbaye.be/dossiers/PA/PA_ind.htm
| 

