I.6.Identification des systèmes statiques et
dynamiques :
Dans une situation statique, identification est utilisée
dans un objectif de reconnaissance moyennant un operateur ou fonction de
décision P : U?Y.
Dans les systèmes dynamiques, l'operateur
P décrivant le système est définit, par
exemple à partir d'un ensemble de couples entrée/sortie (Ui(t),
Yi(t)) ? (U*Y)
Avec la variable de temps t ? *0, T+.l'objectif de
l'identification étant de trouve P tel que [8] :
? y^-y?=? P^(u)-P(u) ??å, u?U (I-3)
I.7.Procédure d'identification:
Pour obtenir un modèle consistant, il est important
d'exciter le processus avec toutes les fréquences de sa plage de
fonctionnement. Le signal d'entrée appliqué doit donc être
riche en fréquences (posséder un large spectre). En
général on applique un signal périodique
pseudoaléatoire (PRBS).
Lorsque le système possède plusieurs
entrées/plusieurs sorties, il est important d'appliquer des signaux
dé corrélés pour ne pas introduire de biais
d'identification. Une idée commune consistant à exciter l'une
après l'autre les entrées est une mauvaise méthode car
elle introduit un biais d'identification et ne rend pas compte du
fonctionnement normal du système. Il est important de respecter une
procédure rigoureuse pour identifier un procédé :
· Détermination d'un protocole de test :
propriétés statistiques des signaux d'entrée pour balayer
toutes les fréquences intéressantes, le ratio signal/bruit doit
être suffisamment important et le nombre de points de mesures doit
être significatif pour le test (>1000)
· Détermination de la structure du modèle
: type de modèle, ordre et retard.
· Identification : choix d'un algorithme pour trouver le
modèle en minimisant.
· Les erreurs entre les mesures et le modèle, en
général algorithme basé sur la méthode des moindres
carrés (LS, RLS, RELS).
· Validation du modèle : Réalisation de
plusieurs tests de vérification. Il est nécessaire pour cette
étape d'utiliser des mesures différentes de celles
utilisées lors de l'identification *9+.
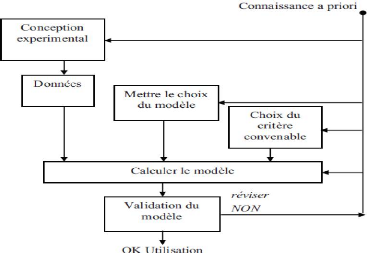
Figure I.1.Schéma de Procédure
d'identification I.8.Architecture des schémas
d'identification :
Nous focalisons l'attention ici sur la nature paramétrique
ou non des schémas proposés. En effet, cet aspect revêt une
importance plus grande en identification des systèmes non
linéaires en blocs dans la mesure où ces derniers sont
constitués de plusieurs sous- systèmes, le choix entre une
représentation paramétrique ou non se pose pour chacun de ces
sous-systèmes [10].
> Système entièrement paramétrique : les
deux sous-systèmes (linéaire et non Linéaire) sont
caractérisés par une représentation
paramétrique.
> Système partiellement paramétrique : un des
deux sous-systèmes est non paramétrique.
> Système entièrement non paramétrique :
les deux sous-systèmes sont non paramétriques
| 

