III.5.Apprentissage d'un contrôleur conventionnel
:
Un réseau de neurones peut reproduire le comportement
d'un contrôleur conventionnel déjà existant (PI, PID, RST,
...) grkce à ses facultés d'apprentissage et d'approximation. Il
suffit de le soumettre à un apprentissage hors ligne pendant une phase
d'identification directe en considérant que le contrôleur est
lui-même un processus. La figure III.8 montre le
principe de l'identification directe d'un contrôleur conventionnel.
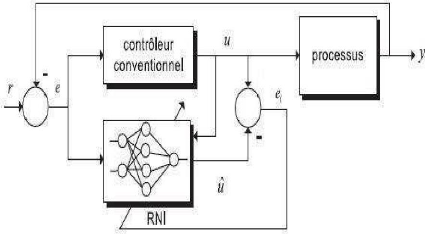
Figure III.8. Schéma d'identification
directe d'un contrôleur conventionnel avec un RNI
Le but de cette architecture n'est pas de perfectionner les
performances du contrôleur conventionnel déjà existant,
mais de s'affranchir des contraintes d'implémentations
matérielles que peuvent nécessiter certains régulateurs.
La méthode de régulation de type RST par exemple est reconnue
pour ses bonnes performances en commande mais elle pose de sérieux
problèmes en intégration numérique.
| 

